一种足印面积计算方法及其系统
文献发布时间:2023-06-19 10:35:20
技术领域
本发明涉及足部测量技术领域,尤其涉及一种足印面积计算方法及其系统。
背景技术
人体足印是指人类生活中足部于地面等物质接触时留下的痕迹,即人在站立或者行走等活动时自身重量和肌力通过足部作用于地面等物质上形成的痕迹。足印在人们生活的各个方面正在变得日益重要,如在鞋楦设计中,目前通过传统的手工测量的方式获得数据并对足部特征尺寸和特征线进行测量,可用于鞋的个性化定制,专业化生产,制造出适合每个人的个性化的鞋,在医用上通过采集足印数据可以分析是正常足,高弓足还是扁平足,以及可以对糖尿病足部溃烂等病人进行监测。
目前传统的足印获取方法有三种,包括试纸测量法、X线测量法和压力测量法。试纸测量法是通过在待测者脚底蘸10%的三氯化铁试剂,然后站立在10%亚铁氰化钾浸泡晾干后的试纸上,留下普蓝色脚印的方式测量,或者直接在脚底涂抹颜料然后踩在测试纸上采集。X线测量法是用X射线拍摄待测者足部侧位进行测量的方法。足底压力测量法是用足底压力测试仪测量足底的方法。上述三种足印采集的方法虽然都能够采集到完整的足印,但是其各自都有着不同程度的缺点。试纸测量法污染性比较大而且费时费力,容易受到环境温度和气候的影响,且对于年长老人和年幼儿童不适用,采集的足印数据也不易长久保存。X射线测量法不适用于普查,需要有一定的测量环境和仪器。足底压力测量法测量的时间较长而且价格较贵。
以上背景技术内容的公开仅用于辅助理解本发明的构思及技术方案,其并不必然属于本专利申请的现有技术,在没有明确的证据表明上述内容在本专利申请的申请日已经公开的情况下,上述背景技术不应当用于评价本申请的新颖性和创造性。
发明内容
为克服上述技术问题,本发明提出一种足印面积计算方法及其系统,不仅提升了便捷性和效率,而且测量精度和速度也有了极大的提升。
为了达到上述目的,本发明采用以下技术方案:
本发明的一个实施例公开了一种足印面积计算方法,包括以下步骤:
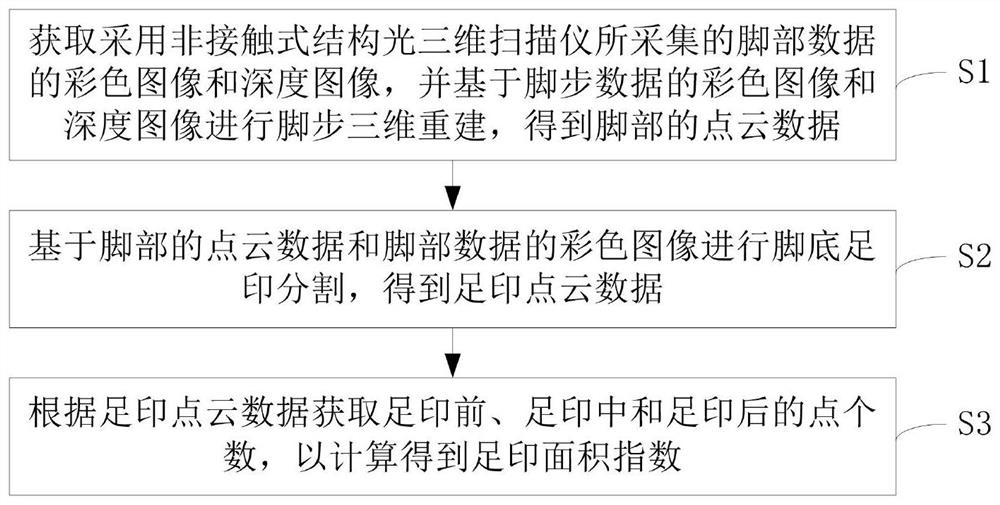
S1:获取采用非接触式结构光三维扫描仪所采集的脚部数据的彩色图像和深度图像,并基于所述脚部数据的彩色图像和深度图像进行脚部三维重建,得到脚部的点云数据;
S2:基于步骤S1得到的脚部的点云数据和脚部数据的彩色图像进行脚底足印分割,得到足印点云数据;
S3:根据所述足印点云数据获取足印前、足印中和足印后的点个数,以计算得到足印面积指数。
优选地,所述脚部数据的彩色图像和深度图像包括脚面的彩色图像和深度图像、脚底的彩色图像和深度图像,其中步骤S2中是基于步骤S1得到的脚部的点云数据和脚底的彩色图像进行脚底足印分割以得到足印点云数据。
优选地,步骤S2具体包括:
S21:根据步骤S1得到的脚部的点云数据,计算得到脚底点云的外围轮廓,以得到脚底点云在脚底所在平面上的掩模图像;
S22:将脚底的彩色图像转换为灰度图像I1,并将脚底点云的掩模图像投影至图像坐标系得到掩模图像I2,根据掩模图像I2将灰度图像I1上的足印分割出来得到图像坐标系下的足印数据;
S23;通过相机的内参和外参将图像坐标系下的足印数据转换到世界坐标系获得点云上的足印,得到足印点云数据。
优选地,步骤S21具体包括:通过Z轴坐标将步骤S1得到的脚部的点云数据进行分层,根据Z轴取值为0~10mm中的任意数值以得到脚底点云;再根据脚底点云分别在X轴和Y轴上的最大值和最小值计算得到脚底点云的外围轮廓,并通过边界条件得到脚底点云在脚底所在平面上的掩模图像。
优选地,将脚底点云的掩模图像投影至图像坐标系得到掩模图像I2具体包括:通过相机的内参和外参将脚底点云的掩模图像投影至图像坐标系,求得图像坐标系上的掩模位置并将掩模位置的灰度值设置为255,得到掩模图像I2。
优选地,根据掩模图像I2将灰度图像I1上的足印分割出来得到图像坐标系下的足印数据具体包括:
将灰度图像I1上灰度值小于10的数据的灰度值设置为0,获取掩模图像I2上灰度值为0的数据的位置并在灰度图像I1上将与掩模图像I2上灰度值为0的数据的位置相对应的位置数据的灰度值设置为0;
计算灰度图像I1上灰度值大于0的数据的平均灰度值,以及灰度图像I1上灰度值大于230的数据占整个灰度值大于0的数据的比例值,如果所述比例值大于0.5,则将灰度图像I1上灰度值小于平均灰度值的数据的灰度值设置为0,否则不做处理;
对灰度图像I1求连通域以获取最大连通域,根据所述最大连通域得到图像坐标系下的足印数据。
优选地,对灰度图像I1求连通域以获取最大连通域,根据所述最大连通域得到图像坐标系下的足印数据具体包括:对灰度图像I1做腐蚀操作,并对灰度图像I1求连通域以获取最大连通域,将所述最大连通域的内部填充为255,再进行膨胀操作,得到图像坐标系下的足印数据。
优选地,步骤S3具体包括:将所述足印点云数据投影至脚底所在平面并计算脚尖到脚后跟的方向上的最大值和最小值,根据脚尖到脚后跟的方向上的最大值和最小值的差值将足印分为足印前、足印中和足印后三个区域,分别计算足印前、足印中和足印后三个区域的点个数,并将足印中的区域的点个数除以三个区域的点个数之和得到足印面积指数。
本发明的另一实施例公开了一种足印面积计算系统,包括:
三维重建模块,被配置为获取采用非接触式结构光三维扫描仪所采集的脚部数据的彩色图像和深度图像,并基于所述脚部数据的彩色图像和深度图像进行脚部三维重建,得到脚部的点云数据;
足印分割模块,被配置为基于所述三维重建模块得到的脚部的点云数据和脚部数据的彩色图像进行脚底足印分割,得到足印点云数据;
足印面积计算模块,被配置为根据所述足印点云数据获取足印前、足印中和足印后的点个数,以计算得到足印面积指数。
本发明的另一实施例公开了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令在被处理器调用和执行时,所述计算机可执行指令促使处理器实现上述的足印面积计算方法的步骤。
与现有技术相比,本发明的有益效果在于:本发明提出的足印面积计算方法及其系统,采用基于结构光的三维扫描技术所采集的脚部数据的彩色图像和深度图像,通过视觉算法重建脚部点云,并通过在点云和脚部彩色图像进行3D图像分割以获取足印,然后求取脚底的足印面积指数,以替代传统接触式采集足印的方法,具有速度快、精度高、非接触式测量等邮件,不仅提升了操作人员的便捷性和效率,而且测量精度和速度也有了极大的提升。
附图说明
图1是本发明优选实施例的足印面积计算方法的流程图;
图2是本发明优选实施例的足印面积计算系统的结构框图。
具体实施方式
为了使本发明实施例所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。另外,连接既可以是用于固定作用也可以是用于电路连通作用。
需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多该特征。在本发明实施例的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
随着计算机视觉技术的发展,目前的测量技术已经由接触式向非接触式发展,处理技术也由二维空间向三位空间转变。所以三维非接触式测量技术在足印采集方面有着广阔的应用前景。基于结构光的三维扫描技术有着速度快、精度高、便携等诸多优点,非常适合足印采集的应用。因此,本发明提出一种基于结构光的三维扫描仪采集得到的脚部数据对足印面积进行计算的方法。
如图1所示,本发明优选实施例公开了一种基于3D图像分割的足印面积计算方法,包括以下步骤:
S1:通过非接触式结构光三维扫描仪采集脚部数据(包括脚面和脚底)的彩色图像和深度图像,并基于脚部数据的彩色图像和深度图像进行脚部三维重建,得到点云,再对点云进行去噪、去孤立点等操作进行优化,得到脚部的点云数据;
其中非接触式结构光三维扫描仪包括深度相机,通过深度相机采集脚面的彩色图像和深度图像以及脚底的彩色图像和深度图像。
S2:基于步骤S1得到的脚部的点云数据和脚底的彩色图像进行脚底足印分割;
步骤S2具体包括:
S21:通过Z轴坐标将步骤S1得到的脚部的点云数据进行分层,利用Z轴经验值C1(在本实施例中C1取值为0~10mm)取得脚底点云;通过排序获得脚底点云的Y轴坐标的最大值ymax和最小值ymin,并通过排序获得脚底点云的X轴坐标的最大值xmax和最小值xmin;通过上述极值点计算求得脚底点云的外围轮廓,再通过边界条件得到脚底点云在XOY平面的掩模图像;
S22:将脚底的彩色图像转换为灰度图像I1,通过深度相机的内参和外参矩阵将脚底点云的掩模图像投影回图像坐标系,求得图像坐标系上的掩模位置并将其灰度值设置为255得到掩模图像I2;
然后剔除掉灰度图像I1上灰度值小于10的数据将其灰度值设置为0,获取掩模图像I2上灰度值为0的数据的位置并在灰度图像I1上将其对应位置数据的灰度值设置为0;
计算灰度图像I1上灰度值大于0的数据的平均灰度值,以及灰度图像I1上灰度值大于230的数据占整个灰度值大于0的数据的比例;如果该比例值大于0.5则将灰度图像I1上灰度值小于平均灰度值的数据的灰度值设置为0,否则不做处理。
对计算后的灰度图像I1做一次3×3的腐蚀操作,并对其求连通域以获取最大连通域并将该最大连通域的内部填充为255,接着进行一次3×3的膨胀操作,这样就在图像上将足印从脚底的彩色图像上分割出来了,即得到图像坐标系下的足印数据。
S23:通过相机的内参和外参将图像坐标系下的足印数据转换到世界坐标系获得点云上的足印,得到用于足印面积计算的足印点云数据;
S3:将足印点云数据投影到XOY平面并计算Y轴的最大值和最小值。计算脚尖第一跖骨点的Y轴值和Y轴最小值的差值L,根据差值L将足印分为三个区域,如最小值到L/3处为足印后,L/3到2L/3处为足印中,2L/3到最大值处为足印前,分别计算足印前、足印中和足印后区域内的点个数获得足印面积前、足印面积中和足印面积后,从而通过足印面积中除以整个足印面积内点个数计算得到足印面积指数。
通过计算得到的足印面积指出,可以用来据此制造出适合每个人的个性化的鞋楦,在医用上通过足印面积指数可以分析是正常足、高弓足还是扁平足,以及可以对糖尿病足部溃烂等病人进行监测。
本发明优选实施例提供的足印面积计算方法,首先通过2.5D图像(彩色图像和深度图像)和相机内外参数获取脚底的点云,并对点云进行去噪,去孤立点等操作得到优化后的脚底点云文件;然后通过脚底点云和相机内外参重投影回图像坐标系并通过脚底的彩色图像进行足印分割,再通过相机的内外参将分割的足印转换到点云上;最后通过获取的点云上的足印信息,分别求得足印面积前,足印面积中,足印面积后和足印面积指数等测量尺寸。
如图2所示,本发明优选实施例还公开一种足印面积计算系统,包括:
三维重建模块21,被配置为获取采用非接触式结构光三维扫描仪所采集的脚部数据的彩色图像和深度图像,并基于脚部数据的彩色图像和深度图像进行脚部三维重建,得到脚部的点云数据;具体的,该三维重建模块被配置为执行上述步骤S1中所包含的全部步骤,在此不再赘述。
足印分割模块22,被配置为基于脚部的点云数据和脚部数据的彩色图像进行脚底足印分割,得到足印点云数据;具体的,该足印分割模块被配置为执行上述步骤S2中所包含的全部步骤,在此不再赘述。
足印面积计算模块23,被配置为根据足印点云数据获取足印前、足印中和足印后的点个数,以计算得到足印面积指数。具体的,该足印面积计算模块被配置为执行上述步骤S3中所包含的全部步骤,在此不再赘述。
本发明优选实施例提供的足印面积计算系统,包括三维重建模块、足印分割模块和足印面积计算模块,其中三维重建模块是处理相机获取的2.5D图像(彩色图像和深度图像),生成点云并对其进行优化,足印分割模块是通过相机内外参,点云以及rgb-d图像(彩色图像和深度图像)对脚底的足印进行精确分割,足印面积计算模块是在点云上对分割的足印面积进行计算,分别求得足印面积前,足印面积中,足印面积后和足印面积指数等测量尺寸。
本发明优选实施例还公开一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令在被处理器调用和执行时,所述计算机可执行指令促使处理器实现上述的足印面积计算方法的步骤。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干等同替代或明显变型,而且性能或用途相同,都应当视为属于本发明的保护范围。
- 一种足印面积计算方法及其系统
- 一种空调系统的敷设面积工程计算方法、系统、装置及存储介质