椎板撑开装置
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及医疗器械技术领域,具体而言,涉及一种椎板撑开装置。
背景技术
人体脊柱包括椎管结构,椎管会因各种原因导致椎管狭窄,例如发育性椎管狭窄、颈椎病、椎间盘突出症、后纵韧带骨化症、黄韧带肥厚等,若发生椎管狭窄,则会导致压迫脊髓引起轴性疼痛、四肢疼痛麻木、肌无力甚至瘫痪等症状,严重地影响人们日常生活。
开门式椎管成形术(比如,双开门式椎管成形术或者半开门式椎管成形术)是一种常用的扩大椎管的手术方式。在脊柱椎板成形术中,通常手术方式包括“单开门式”或“双开门式”。现有的单开门手术中通常采用单侧切缝的方法进行椎板的撑开步骤,使用镊子以及钩子等简单工具将椎板掀开,单开门手术中,往往因为棘突附着的肌肉以及韧带被剥离的比较彻底,术中可操作空间较大,且不需要精准撑开,因此使用镊子以及钩子等这类简单工具也足够满足该类手术椎板的撑开以及维持。但有时需要进行椎板双侧切缝,撑开缝隙使棘突提升,并在缝隙内加入人工骨或替代填充块并配合骨板连接固定,俗称“升顶术”,该手术术中棘突的撑开不能为垂直于切开面的撑开,而要求棘突部分垂直于人体冠状面向后撑开,并且该手术与传统椎板成形术不同,其不需要剥离棘突上附着的肌肉以及韧带,仅需在两侧各一个小切口的情况下进行人工椎板假体的植入,但是,该手术术中视野以及可操作范围十分有限,且撑开过程中棘突附着的肌肉韧带往往对椎板的撑开有一定的抵抗力;因此,在上述的单开门中所使用的撑开工具,在“升顶术”中,该类简单工具因为视野有限的关系很难实现椎板的按垂直于人体冠状面向后的方向撑开,而由于棘突附着肌肉韧带的抵抗力的缘故,其也很难实现椎板的牢固撑开以及撑开后的维持,更难实现撑开时的人工椎板假体的精准植入。
目前,在“升顶术”中,用于撑开椎板的撑开机构和用于输送待植入件的输送机构是分体设置且相互独立的两个机构,将待植入件植入至椎板需要在椎板处于撑开的状态下进行,然而,由于该手术术中视野以及可操作范围十分有限,导致在有限的视野以及可操作范围内难以实现撑开椎板的同时准确地将待植入件植入至椎板,造成手术不便。
发明内容
本发明的主要目的在于提供一种椎板撑开装置,该椎板撑开装置能够在有限的视野以及可操作范围内实现撑开椎板的同时准确地将待植入件植入至椎板,便于手术的进行。
为了实现上述目的,本发明提供了一种椎板撑开装置,包括:撑开机构,包括握持结构和与握持结构连接的撑开结构,撑开结构包括第一支撑臂和与第一支撑臂连接的第二支撑臂,第一支撑臂上设有活动设置的第一钳头,第二支撑臂上设有第二钳头,第一钳头具有远离第二钳头的撑开位置和靠近第二钳头的收纳位置;输送机构,设置于握持结构,输送机构包括用于连接或者释放待植入件的连接结构,输送机构相对于握持结构可移动地设置,以使待植入件能够运动至第一钳头和/或第二钳头处。
进一步地,撑开结构还包括连接杆,连接杆的一端与第一钳头枢转连接,连接杆的另一端与第二钳头枢转连接,第一钳头与第一支撑臂枢转连接,第二钳头与第二支撑臂连接,在外力的作用下,第一支撑臂相对于第二支撑臂可移动地设置,以使第一钳头在撑开位置和收纳位置之间切换。
进一步地,撑开结构还包括用于容纳至少部分连接杆的容纳槽,容纳槽设置于第一支撑臂或者第二支撑臂。
进一步地,撑开机构还包括用于调节第一支撑臂相对于第二支撑臂的位置的第一限位结构,第一限位结构包括:第一限位孔,设置于第一支撑臂;第二限位孔,为设置于第二支撑臂的长条孔;锁紧件,分别与第一限位孔和第二限位孔连接,以将第一支撑臂锁定于第二支撑臂。
进一步地,撑开机构包括两个间隔设置的撑开结构,两个撑开结构的两个第一支撑臂连接,至少部分连接结构位于两个撑开结构之间的间隙内。
进一步地,握持结构包括:第一套筒,与第二支撑臂连接,输送机构位于第一套筒的外部;第一转轴,设置于第一套筒内,第一转轴绕自身轴线可转动地设置;其中,第一转轴的一端与设置于第一支撑臂的支座螺纹配合,第一套筒上设有用于防止支座转动的第二限位结构,至少部分支座与第二限位结构配合,以将螺旋运动转化为第一支撑臂的直线运动。
进一步地,第二限位结构为设置于第一套筒的第一限位凹槽,至少部分支座位于第一限位凹槽内,在外力的作用下,支座相对于第一限位凹槽可移动地设置;或者,握持结构还包括第一旋钮,第一旋钮设置于第一转轴的远离第一支撑臂的一端。
进一步地,输送机构还包括位于握持结构的外部的第二套筒,第二套筒相对于握持结构可移动地设置,连接结构设置于第二套筒内,连接结构包括绕自身轴线可转动地设置的连接轴,连接轴的一端伸出第二套筒。
进一步地,第二套筒包括与握持结构连接的第一套筒段和与第一套筒段连接的第二套筒段,第一套筒段的中心轴线与第二套筒段的中心轴线之间具有夹角,连接轴设置于第二套筒段内;输送机构还包括设置于第一套筒段内的第二转轴,第二转轴相对于第一套筒段可转动地设置,第二转轴的一端与连接轴活动连接,以带动连接轴转动。
进一步地,输送机构还包括与第二转轴连接的第二旋钮,连接轴和第二旋钮分别设置于第二转轴的相对两端;或者,输送机构还包括第二限位件,第一套筒段上设有第三限位孔,第二转轴的外壁面上设有第二限位凹槽,第二限位件穿设在第三限位孔内,第二限位件的一端穿出第三限位孔并与第二限位凹槽配合;或者,输送机构还包括与第二套筒段连接的安装座,安装座设置于第二套筒段的远离第一套筒段的一端,安装座上设有安装通孔。
进一步地,椎板撑开装置还包括移动机构,输送机构通过移动机构与握持结构连接,移动机构相对于握持结构可移动地设置,以带动输送机构移动。
进一步地,移动机构包括:移动结构,包括移动本体和设置于移动本体的与至少部分握持结构配合的第一凹槽,输送机构与移动本体连接;锁紧结构,穿设在移动本体上,且锁紧结构相对于移动本体可移动地设置,以使锁紧结构的一端与握持结构的外壁面抵接,将移动结构与握持结构锁紧。
进一步地,移动结构还包括设置于移动本体的第二凹槽,第二凹槽和第一凹槽分别位于移动本体的相对两侧,输送机构与第二凹槽卡接连接。
应用本发明的技术方案,撑开机构和输送机构连接形成一体结构,撑开机构用于撑开椎板,输送机构用于连接、输送待植入件,使待植入件运动至第一钳头和第二钳头处,也就是使待植入件运动至撑开椎板处,在外力的作用下,输送机构释放待植入件,从而实现对待植入件的准确植入。以上也就是说,撑开机构和输送机构作为一个整体,当通过撑开机构撑开椎板时,可以通过输送机构连接、输送待植入件至撑开椎板处,再通过外力作用,使输送机构释放待植入件,将待植入件准确植入至撑开椎板处,从而实现了在撑开椎板的同时准确地将待植入件植入至椎板处的目的;由于通过输送机构相对于握持结构的移动可以实现将待植入件输送至撑开椎板处的目的,因此,本申请的椎板撑开装置对视野以及可操作范围的要求较低;综上,本申请的椎板撑开装置能够在有限的视野以及可操作范围内实现在撑开椎板的同时准确地将待植入件植入至椎板的目的,便于手术的进行。
附图说明
构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
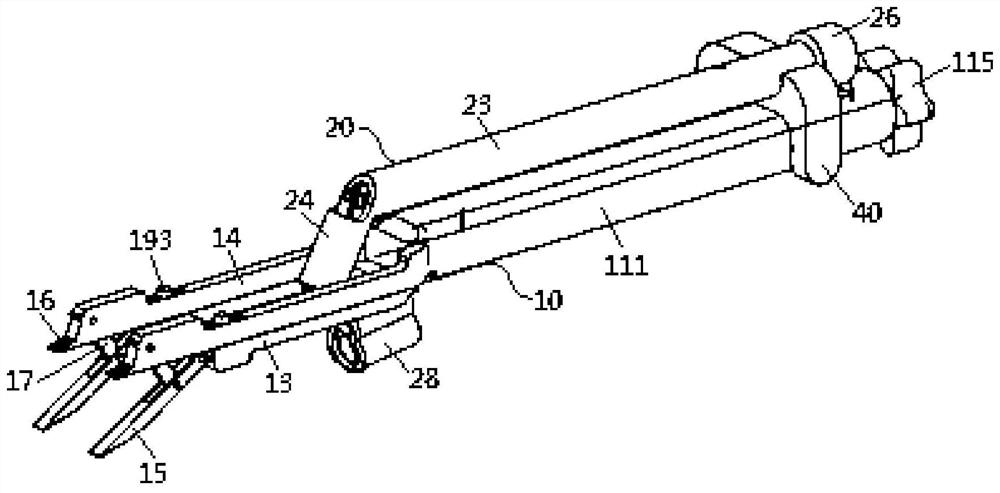
图1示出了根据本发明的椎板撑开装置的实施例的结构示意图;
图2示出了图1的椎板撑开装置的另一角度的结构示意图;
图3示出了图2的局部剖视图;
图4示出了图1的俯视图;
图5示出了图1的椎板撑开装置的撑开机构的结构示意图;
图6示出了图5的撑开机构的撑开结构的剖视图(其中,第一钳头处于撑开位置);
图7示出了图5的撑开机构的撑开结构的另一剖视图(其中,第一钳头处于收纳位置);
图8示出了图5的撑开机构的部分结构示意图;
图9示出了图8的第一支撑臂的结构示意图;
图10示出了图5的撑开机构的另一部分结构示意图;
图11示出了图1的椎板撑开装置的输送机构和移动机构连接的结构示意图;
图12示出了图11的输送机构的部分结构示意图;
图13示出了图11的输送机构的另一部分结构示意图;
图14示出了图11的输送机构和待植入件连接的结构示意图;
图15示出了图14的输送机构和待植入件连接的另一角度的结构示意图;
图16示出了图11的移动机构的结构示意图;
图17示出了将图1的椎板撑开装置应用至椎板的结构示意图(其中,第一钳头处于收纳位置);
图18示出了图17的另一结构示意图(其中,第一钳头处于撑开位置);
图19示出了图17的又一结构示意图(其中,第一钳头处于撑开位置,待植入件运动至第一钳头处);以及
图20示出了待植入件安装至椎板的结构示意图。
其中,上述附图包括以下附图标记:
10、撑开机构;11、握持结构;111、第一套筒;112、第一转轴;113、第二限位结构;114、第一限位凹槽;115、第一旋钮;12、撑开结构;13、第一支撑臂;131、支座;14、第二支撑臂;15、第一钳头;16、第二钳头;17、连接杆;18、容纳槽;191、第一限位孔;192、第二限位孔;193、锁紧件;20、输送机构;21、连接结构;22、第二套筒;23、第一套筒段;231、第三限位孔;24、第二套筒段;25、第二转轴;251、第二限位凹槽;26、第二旋钮;27、第二限位件;28、安装座;281、安装通孔;30、待植入件;40、移动机构;41、移动结构;411、移动本体;412、第一凹槽;413、第二凹槽;42、锁紧结构;51、椎板部分;52、椎体部分。
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
需要指出的是,除非另有指明,本申请使用的所有技术和科学术语具有与本申请所属技术领域的普通技术人员通常理解的相同含义。
在本发明中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的,或者是针对部件本身在竖直、垂直或重力方向上而言的;同样地,为便于理解和描述,“内、外”是指相对于各部件本身的轮廓的内、外,但上述方位词并不用于限制本发明。
针对目前的撑开机构和输送机构是分体设置且相互独立的两个机构,由于“升顶术”手术术中视野以及可操作范围十分有限,导致在有限的视野以及可操作范围内难以实现撑开椎板的同时准确地将待植入件植入至椎板,造成手术不便的问题,本发明及本发明的实施例提供了一种椎板撑开装置。
需要说明的是,本发明及本发明的实施例中,待植入件30为人工椎板假体。
如图1至图3、图5、图6和图11所示,本发明的实施例中,椎板撑开装置包括撑开机构10和输送机构20,撑开机构10包括握持结构11和与握持结构11连接的撑开结构12,撑开结构12包括第一支撑臂13和与第一支撑臂13连接的第二支撑臂14,第一支撑臂13上设有活动设置的第一钳头15,第二支撑臂14上设有第二钳头16,第一钳头15具有远离第二钳头16的撑开位置和靠近第二钳头16的收纳位置;输送机构20设置于握持结构11,输送机构20包括用于连接或者释放待植入件30的连接结构21,输送机构20相对于握持结构11可移动地设置,以使待植入件30能够运动至第一钳头15和/或第二钳头16处。
上述设置中,撑开机构10和输送机构20连接形成一体结构,撑开机构10用于撑开椎板,输送机构20用于连接、输送待植入件30,使待植入件30运动至第一钳头15和第二钳头16处,也就是使待植入件30运动至撑开椎板处,在外力的作用下,输送机构20释放待植入件30,从而实现对待植入件30的准确植入。
以上也就是说,撑开机构10和输送机构20作为一个整体,当通过撑开机构10撑开椎板时,可以通过输送机构20连接、输送待植入件30至撑开椎板处,再通过外力作用,使输送机构20释放待植入件30,将待植入件30准确植入至撑开椎板处,从而实现了在撑开椎板的同时准确地将待植入件30植入至椎板处的目的;由于通过输送机构20相对于握持结构11的移动可以实现将待植入件30输送至撑开椎板处的目的,因此,本申请的椎板撑开装置对视野以及可操作范围的要求较低;综上,本申请的椎板撑开装置能够在有限的视野以及可操作范围内实现在撑开椎板的同时准确地将待植入件植入至椎板的目的,便于手术的进行。
如图1至图3、图5、图6、图18和图20所示,本发明及本发明的实施例中,为了便于固定和撑开椎板(椎板包括椎板部分51和椎体部分52),第一钳头15为活动件,第一钳头15与第一支撑臂13是活动连接的;第二钳头16为固定件,第二钳头16与第二支撑臂14是固定连接的;也就是第一钳头15具有能够撑开椎板部分51的撑开位置(此时椎板部分51远离椎体部分52)和与第二钳头16贴合的收纳位置。实际使用时,第二钳头16与椎体部分52抵接,第一钳头15与椎板部分51抵接,在外力的作用下,第一钳头15相对于第二钳头16撑开,第一钳头15处于撑开位置,将椎板部分51向远离椎体部分52的一侧撑开,实现固定和撑开椎体的目的。
另外,通过操作握持结构11可以控制撑开结构12,使第一钳头15和第二钳头16相互靠近或者相互远离,从而实现对第一钳头15在撑开位置和收纳位置之间的切换;当第一钳头15处于撑开位置时,撑开结构12处于撑开状态,也就是撑开机构10撑开椎板,当第一钳头15处于收纳位置时,撑开结构12处于收纳状态,也就是撑开机构10未对椎板起到撑开作用。握持结构11通过第一支撑臂13与第一钳头15连接,握持结构11通过第二支撑臂14与第二钳头16连接,从而实现握持结构11对撑开结构12的控制,使撑开结构12在撑开状态和收纳状态之间切换,实现撑开机构10对椎板的撑开作用。输送机构20的连接结构21用于连接或者释放待植入件30,从而实现输送机构20能够连接、输送以及释放待植入件30的作用;当进行手术时,先将连接结构21与待植入件30连接,在撑开机构10撑开椎板后,施加外力,使输送机构20将待植入件30输送至撑开椎板处,并进一步在外力的作用下,使输送机构20释放待植入件30,从而实现在有限的视野以及可操作范围内实现在撑开椎板的同时准确地将待植入件植入至椎板的目的,便于手术的进行。
本申请的技术方案中,椎板撑开装置在有限视野以及操作范围下能够实现缝隙的撑开并使棘突垂直后移,达到扩大椎间孔的目的,并且能够有效保持棘突部分的撑开位置,使得人工椎板假体能够同时精准植入于缝隙中。
在发明人知道的一种用于“升顶术”的椎板撑开装置中,该椎板撑开装置依靠撑开爪的前部和支撑爪贴靠在一起用于共同伸入椎板侧面切缝,通过紧握手柄可以撑开撑开爪的上爪从而实现抬起、撑开切缝的作用,该工具可以达到“升顶术”术中椎板的有效稳定撑开。
虽然该工具能够实现椎板的牢固撑开,但是该工具往往仅仅能够实现椎板的撑开,该工具使用后往往需要额外的工具对撑开后的椎板进行有效支撑以及夹持工具将人工椎板假体进行持取植入,也就是说,该椎板撑开装置无法实现撑开的同时植入人工椎板假体的功能,使用该工具进行人工椎板假体植入时,往往需要多名医务人员共同协作使用多件工具才能够将假体植入,且其往往很难将假体准确植入到预期位置,术后的椎板撑开效果往往不够理想;相较于上述技术,本申请的椎板撑开装置能够实现人工椎板假体(即待植入件30)的精准简易植入,并且,本申请的椎板撑开装置同时包括撑开机构10和输送机构20,使用本申请的椎板撑开装置时,一只手操作撑开机构10,实现撑开功能,另一只手操作输送机构20,通过输送机构20输送待植入件30至第一钳头15和第二钳头16处并释放待植入件30,本申请的椎板撑开装置能够在实现撑开并维持撑开状态的同时准确植入待植入件30,保证手术效率和效果,并且,通过本申请的椎板撑开装置,单人操作即可完成撑开动作和植入动作,无需多人协作,能够节约医务资源,提高利用率,简化手术过程,便于手术的进行。
“升顶术”作为近年来比较新颖的椎体椎板成形术,因其术中能有效保护人体的肌肉韧带,且术后能够有效防止开门椎板“再关门”现象的发生以及能够维持人体颈椎的生理形态,故该手术方式具有着广阔的市场发展前景。但若使用市场上的现有工具进行操作,往往具有不够简易且操作繁琐等缺点,且很难实现该术式(即手术方式)中人工椎板假体的精准植入,从而术后无法进行解剖形态精准的复原以及力学模型的稳定,这些缺点使得该术式的学习曲线较长,学习难度较大,很大程度上限制了该术式的推广。本申请的技术方案中,椎板撑开装置可以使得该手术简易化,且能够实现人工椎板假体的精准植入,其在保证手术效果的同时极大地减少了学习时间,为该术式的推广扫平了一个障碍。
如图1至图3和图5至图7所示,本发明的实施例中,撑开结构12还包括连接杆17,连接杆17的一端与第一钳头15枢转连接,连接杆17的另一端与第二钳头16枢转连接,第一钳头15与第一支撑臂13枢转连接,第二钳头16与第二支撑臂14固定连接,在外力的作用下,第一支撑臂13相对于第二支撑臂14可移动地设置,以使第一钳头15在撑开位置和收纳位置之间切换。
上述设置中,第二钳头16与第二支撑臂14的相对位置固定,第一钳头15和第二钳头16均与连接杆17枢转连接,当第一支撑臂13相对于第二支撑臂14移动,在第一支撑臂13的带动下,第一钳头15移动,在第一钳头15的带动下,连接杆17绕连接杆17和第二钳头16之间的枢转点(该枢转点是个位置不会发生变化的固定点)转动,连接杆17在第一钳头15和第二钳头16之间撑开或者收纳,由于第二钳头16的位置固定,因此,在连接杆17的带动下,第一钳头15相对于第二钳头16撑开或者收纳;也就是说,通过第一支撑臂13相对于第二支撑臂14的移动,可以实现第一钳头15相对于第二钳头16在撑开位置和收纳位置之间的切换。
当然,在本申请的附图未示出的替代实施例中,还可以根据实际需要,使第二钳头16与第二支撑臂14枢转连接,这样,当第一支撑臂13和第二支撑臂14相对移动时,第一钳头15和第二钳头16均可以在撑开位置和收纳位置之间切换,可以增大撑开机构10的撑开效果。
如图6和图7所示,本发明的实施例中,撑开结构12还包括用于容纳至少部分连接杆17的容纳槽18,容纳槽18设置于第二支撑臂14。当撑开结构12处于收纳状态时,至少部分连接杆17收纳在容纳槽18内,设置容纳槽18一方面可以实现对连接杆17的收纳,另一方面可以减小第一钳头15和第二钳头16之间的距离,使结构紧凑。由于本发明的实施例中,相较于第一支撑臂13,第二支撑臂14的稳定性更高,这样可以方便、容易、稳定、可靠且准确地将连接杆17收纳至容纳槽18。
当然,在本申请的附图未示出的替代实施例中,还可以根据实际需要,将容纳槽18设置于第一支撑臂13。
如图1至图3、图5、图9和图10所示,本发明的实施例中,撑开机构10还包括用于调节第一支撑臂13相对于第二支撑臂14的位置的第一限位结构,第一限位结构包括第一限位孔191、第二限位孔192和锁紧件193,第一限位孔191设置于第一支撑臂13;第二限位孔192为设置于第二支撑臂14的长条孔;锁紧件193分别与第一限位孔191和第二限位孔192连接,以将第一支撑臂13锁定于第二支撑臂14。
上述设置中,第一支撑臂13相对于第二支撑臂14可移动,通过第一支撑臂13相对于第二支撑臂14的移动可以对第一钳头15相对于第二钳头16的位置进行调节;根据实际需要,将第一支撑臂13相对于第二支撑臂14移动至一定位置后,可以通过锁紧件193和第一限位孔191以及锁紧件193和第二限位孔192的连接,将第一支撑臂13和第二支撑臂14锁紧,从而使第一钳头15和第二钳头16的相对位置固定,使第一钳头15保持在撑开位置;当需要调节第一钳头15相对于第二钳头16的位置时,可以松开锁紧件193,通过第一支撑臂13相对于第二支撑臂14移动对第一支撑臂13相对于第二支撑臂14的位置进行调节,从而对第一钳头15相对于第二钳头16的位置进行调节,实现对第一钳头15相对于第二钳头16的撑开程度的调节目的;综上,通过第一限位结构可以对第一支撑臂13相对于第二支撑臂14的位置进行调节和锁定,从而实现调节第一钳头15相对于第二钳头16的撑开程度和使第一钳头15保持在撑开位置的目的。
优选地,锁紧件193为螺钉或者销钉。
当然,在本申请的附图未示出的替代实施例中,还可以根据实际需要,使第一限位结构包括多个第二限位孔192(第二限位孔192为长条孔或者常见的规则孔,如圆孔),多个第二限位孔192沿第一支撑臂13相对于第二支撑臂14移动的方向间隔设置于第二支撑臂14;或者,使第一限位孔191为沿第一支撑臂13相对于第二支撑臂14移动的方向设置的长条孔;或者,使第一限位结构包括多个第一限位孔191。
如图1、图4、图5、图8和图9所示,本发明的实施例中,撑开机构10包括两个间隔设置的撑开结构12,两个撑开结构12的两个第一支撑臂13连接,至少部分连接结构21位于两个撑开结构12之间的间隙内。通过两个撑开结构12可以实现更稳定地撑开效果;至少部分连接结构21位于两个撑开结构12之间的间隙内,使得两个撑开结构12之间的间隙形成供待植入件30运动的滑道,通过位于两个撑开结构12之间的间隙内的至少部分连接结构21可以更稳定地输送待植入件30,从而实现对待植入件30的更准确地植入。两个撑开结构12的两个第一支撑臂13连接可以提高结构强度和连接的稳定性。
具体地,两个撑开结构12的两个第二支撑臂14之间可固定人工椎板假体(即待植入件30)。两个第二支撑臂14之间的距离为8毫米至12毫米(优选为10毫米),能够允许常规的人工椎板假体的置入;沿两个第二支撑臂14的排列方向,第一钳头15的宽度尺寸为2mm,两个撑开结构12的整体宽度与人体颈椎椎板的宽度接近。
如图8和图10所示,本发明的实施例中,握持结构11包括第一套筒111和第一转轴112,第一套筒111与第二支撑臂14连接,输送机构20位于第一套筒111的外部;第一转轴112设置于第一套筒111内,第一转轴112绕自身轴线可转动地设置;其中,第一转轴112的一端与设置于第一支撑臂13的支座131螺纹配合,第一套筒111上设有用于防止支座131转动的第二限位结构113,至少部分支座131与第二限位结构113配合,以将螺旋运动转化为第一支撑臂13的直线运动。
上述设置中,第一转轴112相对于第一套筒111可转动,第一转轴112通过支座131带动第一支撑臂13运动,由于第一转轴112与支座131螺纹配合,且第二限位结构113能够防止支座131转动,因此,第一转轴112的转动运动转化为支座131的直线运动,即在第一转轴112的带动下,支座131相对于第二限位结构113移动,从而实现了第一支撑臂13相对于第二支撑臂14移动的目的,可以使第一钳头15在撑开位置和收纳位置之间切换;通过上述设置,实现了通过握持结构11使撑开结构12在撑开状态和收纳状态之间切换的目的,实现了撑开机构10对椎板的撑开作用。将输送机构20设置在第一套筒111的外部便于操作。
优选地,如图8所示,本发明的实施例中,支座131和第一钳头15分别位于第一支撑臂13的相对两端,便于组装;第一转轴112的一端的外壁面上设有外螺纹,支座131上设有第一螺纹孔,第一螺纹孔具有与外螺纹相适配的内螺纹,第一转轴112与支座131螺纹配合。
如图5所示,本发明的实施例中,第二限位结构113为设置于第一套筒111的第一限位凹槽114,至少部分支座131位于第一限位凹槽114内,在外力的作用下,支座131相对于第一限位凹槽114可移动地设置。
上述设置中,第一限位凹槽114防止支座131转动,由于第一转轴112与支座131螺纹配合,因此,当第一转轴112转动时,转动运动转化为直线运动,支座131相对于第一限位凹槽114移动,从而实现第一支撑臂13相对于第二支撑臂14移动的目的。在第一套筒111上设置第一限位凹槽114结构简单,便于加工和组装。
如图1至图5和图8所示,本发明的实施例中,握持结构11还包括第一旋钮115,第一旋钮115设置于第一转轴112的远离第一支撑臂13的一端。通过向第一旋钮115施加外力,可以带动第一转轴112转动,通过设置第一旋钮115可以便于操作第一转轴112。
如图4和图12所示,本发明的实施例中,输送机构20还包括位于握持结构11的外部的第二套筒22,第二套筒22相对于握持结构11可移动地设置,连接结构21设置于第二套筒22内,连接结构21包括绕自身轴线可转动地设置的连接轴,连接轴的一端伸出第二套筒22。
上述设置中,将第二套筒22位于握持结构11的外部,方便控制第二套筒22,使第二套筒22相对于握持结构11移动;连接轴的一端伸出第二套筒22并可以与待植入件30连接,通过连接轴的转动,可以使连接轴与待植入件30连接,方便输送机构20连接、输送待植入件30,或者可以使连接轴与待植入件30解除连接,使输送机构20释放待植入件30;综上,通过连接轴可以实现输送机构20连接、输送以及释放待植入件30的功能。
优选地,如图11、图13至图15所示,本发明的实施例中,连接轴的伸出第二套筒22的一端的外壁面上设有外螺纹,连接轴与待植入件30螺纹配合,这样,通过旋拧连接轴,即可使连接轴与待植入件30连接或者解除连接。
如图1至图4、图11、图12、图14和图15所示,本发明的实施例中,第二套筒22包括与握持结构11连接的第一套筒段23和与第一套筒段23连接的第二套筒段24,第一套筒段23的中心轴线与第二套筒段24的中心轴线之间具有夹角,连接轴设置于第二套筒段24内;输送机构20还包括设置于第一套筒段23内的第二转轴25,第二转轴25相对于第一套筒段23可转动地设置,第二转轴25的一端与连接轴活动连接,以带动连接轴转动。
上述设置中,将第一套筒段23和第二套筒段24呈夹角地设置,一方面可以方便第一套筒段23与握持结构11的连接,另一方面可以将第二套筒段24布置在两个撑开结构12之间的间隙中,由于设置在第二套筒段24内的连接轴连接待植入件30,因此这样设置可以更平稳地运输待植入件30,有助于准确地植入待植入件30。另外,第二转轴25转动带动连接轴转动,通过设置第二转轴25,可以较容易地对连接轴进行操作,使连接轴转动。
优选地,本发明的实施例中,第二转轴25通过万向接头与连接轴连接。这样设置,可以将第二转轴25的转动运动传递给连接轴,使连接轴转动,实现转动传递。
如图1至图4、图11和图13至图15所示,本发明的实施例中,输送机构20还包括与第二转轴25连接的第二旋钮26,连接轴和第二旋钮26分别设置于第二转轴25的相对两端。向第二旋钮26施加外力,第二旋钮26可带动第二转轴25转动,通过设置第二旋钮26可以较容易地操作第二转轴25,能够方便地使第二转轴25转动。将连接轴和第二旋钮26分别设置于第二转轴25的相对两端可以避免干涉。
如图11至图13所示,本发明的实施例中,输送机构20还包括第二限位件27,第一套筒段23上设有第三限位孔231,第二转轴25的外壁面上设有第二限位凹槽251,第二限位件27穿设在第三限位孔231内,第二限位件27的一端穿出第三限位孔231并与第二限位凹槽251配合。
上述设置中,第二限位件27与第三限位孔231连接并与第二限位凹槽251配合,可以防止第二转轴25的沿其中心轴线方向相对于第一套筒段23的移动运动,使第二转轴25仅能够产生绕其自身轴线的相对于第一套筒段23的转动运动,实现第二转轴25相对于第一套筒段23可转动地设置的目的,保证第二转轴25转动的稳定性。
如图1至图3、图11、图12、图14和图15所示,本发明的实施例中,输送机构20还包括与第二套筒段24连接的安装座28,安装座28设置于第二套筒段24的远离第一套筒段23的一端,安装座28上设有安装通孔281。安装通孔281与待植入件30上的安装孔对应设置,当输送机构20将待植入件30输送至第一钳头15处后,可通过安装通孔281对待植入件30进行安装,将待植入件30安装至椎板,之后即可使连接轴与待植入件30解除连接,将椎板撑开装置取出,完成待植入件30的植入。通过安装通孔281可实现精准置钉,避免了置钉时螺钉脱落,方向错乱等问题,准确将待植入件30安装至椎板。
如图1、图2、图4、图11和图16所示,本发明的实施例中,椎板撑开装置还包括移动机构40,输送机构20通过移动机构40与握持结构11连接,移动机构40相对于握持结构11可移动地设置,以带动输送机构20移动,并且移动机构40具有对输送机构20相对于握持结构11进行固定限位的作用。通过移动机构40带动输送机构20相对于握持结构11移动,实现了输送机构20输送待植入件30的目的,并在将待植入件30输送至椎板处时可以通过移动机构40与握持结构11的连接将输送机构20固定在一定位置,使待植入件30与椎板相对位置固定。
如图16所示,本发明的实施例中,移动机构40包括移动结构41和锁紧结构42,移动结构41包括移动本体411和设置于移动本体411的与至少部分握持结构11配合的第一凹槽412,输送机构20与移动本体411连接;锁紧结构42穿设在移动本体411上,且锁紧结构42相对于移动本体411可移动地设置,以使锁紧结构42的一端与握持结构11的外壁面抵接,将移动结构41与握持结构11锁紧。
上述设置中,移动本体411相对于握持结构11可移动地设置,移动本体411带动输送机构20相对于握持结构11移动,实现了输送机构20输送待植入件30的目的;通过锁紧结构42可以将移动结构41和握持结构11锁紧,使移动结构41和握持结构11相对位置固定,当输送机构20将待植入件30输送至椎板处时,可以通过锁紧结构42锁紧移动结构41,使待植入件30相对于椎板固定,便于安装待植入件30;握持结构11与第一凹槽412配合使移动本体411相对于握持结构11可移动,锁紧结构42相对于移动本体411移动,使锁紧结构42与握持结构11抵接,握持结构11与移动本体411也抵接,从而实现了将移动本体411和握持结构11锁紧的目的,使移动结构41和握持结构11相对位置固定。
具体地,如图16所示,本发明的实施例中,移动本体411通过第一凹槽412套设在握持结构11的第一套筒111的外周,锁紧结构42包括螺钉,移动本体411上设有与第一凹槽412连通的第二螺纹孔,螺钉与第二螺纹孔螺纹配合,通过旋拧该螺钉,可以使螺钉和移动本体411均与握持结构11抵接,从而实现通过锁紧结构42将移动结构41和握持结构11锁紧的目的。
如图16所示,本发明的实施例中,移动结构41还包括设置于移动本体411的第二凹槽413,第二凹槽413和第一凹槽412分别位于移动本体411的相对两侧,输送机构20与第二凹槽413卡接连接。第二凹槽413和第一凹槽412相对设置,可以避免输送机构20和握持结构11之间的相互干涉问题;输送机构20卡接在第二凹槽413内,使输送机构20与移动本体411固定连接,可以实现通过移动本体411带动输送机构20移动的目的。
当然,在本申请的附图未示出的替代实施例中,还可以根据实际需要,使输送机构20通过其他连接方式与移动本体411连接,比如螺纹连接。
本发明的实施例中,椎板撑开装置整体包括撑开机构10、输送机构20和移动机构40,输送机构20通过移动机构40与撑开机构10连接且相对于撑开机构10可移动地设置。
撑开机构10中第一转轴112与第一支撑臂13通过螺纹连接,其他部件之间通过销钉或焊接进行固定(比如,第一支撑臂13与第一钳头15通过销钉连接,第一套筒111与第二支撑臂14焊接连接),通过第一旋钮115转动第一转轴112可促使第一支撑臂13向第一钳头15所在方向移动,第一支撑臂13相对于第二支撑臂14移动,第一钳头15通过连接杆17与第二钳头16枢转连接,达到第一钳头15向上撑开的效果。
输送机构20中,连接轴前端螺纹用于夹持人工椎板假体(即待植入件30),安装座28具有定向置钉作用,安装座28有与人工椎板假体椎板侧板的轮廓相匹配的凹槽,安装通孔281与人工椎板假体椎板侧板钉孔的位置一致,第二转轴25通过万向节结构与连接轴连接,第二限位凹槽251配合销钉(即第二限位件27)实现对第二转轴25的限位功能,使用时旋转后端第二转轴25即可实现连接轴前端螺纹相对于待植入件30的拧入以及退出。
如图17至图20所示,使用该椎板撑开装置时,需预先切断椎板两侧椎板,使得整个椎板以及棘突处于游离状态。使用分为三个阶段,第一阶段为放置阶段,通过输送机构的连接轴前段螺纹与人工椎板组件的螺纹孔进行螺纹固定,移动机构带动输送机构将人工椎板组件输送至第一钳头处,撑开机构的第二支撑臂部分放置于侧块之上,通过第二钳头部分进行临时固定,需保证工具与椎板切开方向一致,使第一钳头和第二钳头置入至椎板间隙中,第二支撑臂和第二钳头抵住椎体部分,第一钳头抵住椎板部分;第二阶段为升顶阶段,旋转第一旋钮,第一支撑臂向前移动,带动第一钳头向上撑开,从而完成升顶,通过控制第一旋钮拧动的圈数可控制升顶的高度;第三阶段为植入阶段,升顶结束后,松开锁紧结构,整个移动机构和输送机构沿着第一套筒下滑,带动人工椎板假体沿椎板切开方向植入至椎板空隙之间,通过安装座实现椎板侧固定螺钉的精准植入,螺钉固定之后,旋转第二旋钮带动第二转轴转动即可将人工椎板假体从连接轴脱离,撤离整个工具,即完成整个植入过程。
旋动第一旋钮的圈数可实现不同高度的精准升顶,正常的升顶距离为6毫米至8毫米,第一旋钮每转动1格,升顶高度升高0.5mm,安装座方向与人工椎板假体椎板侧平面的角度约为5°至10°,可使得置钉的同时能够实现人工椎板假体与侧块之间的加压,实现术后更好地融合,使得植入更为牢固。
本申请的技术方案具有以下优点:
1、该椎板撑开装置功能全面,在实现椎板撑开的同时还能够实现人工椎板假体的连接、植入以及螺钉固定;
2、该椎板撑开装置操作简易,旋动第一旋钮即可实现椎板的垂直撑开,松开锁紧结构即可实现假体滑动植入;
3、该椎板撑开装置能够实现精准的人工椎板假体植入,通过输送机构相对于握持结构移动能够将假体精准植入至椎板间隙中;
4、通过安装通孔可实现精准置钉,避免了置钉时螺钉脱落,方向错乱等问题,可以准确将待植入件安装至椎板。
从以上的描述中,可以看出,本发明上述的实施例实现了如下技术效果:撑开机构和输送机构连接形成一体结构,撑开机构用于撑开椎板,输送机构用于连接、输送待植入件,使待植入件运动至第一钳头和第二钳头处,也就是使待植入件运动至撑开椎板处,在外力的作用下,输送机构释放待植入件,从而实现对待植入件的准确植入。以上也就是说,撑开机构和输送机构作为一个整体,当通过撑开机构撑开椎板时,可以通过输送机构连接、输送待植入件至撑开椎板处,再通过外力作用,使输送机构释放待植入件,将待植入件准确植入至撑开椎板处,从而实现了在撑开椎板的同时准确地将待植入件植入至椎板处的目的;由于通过输送机构相对于握持结构的移动可以实现将待植入件输送至撑开椎板处的目的,因此,本申请的椎板撑开装置对视野以及可操作范围的要求较低;综上,本申请的椎板撑开装置能够在有限的视野以及可操作范围内实现在撑开椎板的同时准确地将待植入件植入至椎板的目的,便于手术的进行。
显然,上述所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、工作、器件、组件和/或它们的组合。
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种骨科用带有撑开板的椎板撑开钳
- 一种骨科用带有撑开板的椎板撑开钳