一种吸附式擦黑板机器人
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及机器人技术领域,涉及一种吸附式擦黑板机器人。
背景技术
粉笔、黑板擦在当今的教育中仍然是一个必不可少的教学工具。从产生到现在已有悠久的历史,对人类的教育事业做出了不可磨灭的贡献,随着历史的进步和社会的发展,粉笔书写给人类带来了巨大的进步和贡献,但传统的擦黑板模式给从事教育的教师及学生带来了极大的危害,不仅需要手动擦黑板,而且有大量粉尘对使用者身体健康造成巨大影响。人们不断想方设法美化教学环境,发明无尘粉笔,更好的黑板,利用投影仪等多媒体教学,但迄今为止还没有更好的方式取代黑板教学。对此,研发了一种黑板清洁机器人或装置,保证老师们尽量少地吸入粉笔灰尘,就显得尤为重要。从而有效地保障广大师生的健康,同时免去了教师擦黑板的时间,为学生带来宝贵的课堂时间。
经文献检索发现,现有的擦黑板机器人主要以磁吸附为主,多采用电磁铁提供吸附力,需要消耗电能,且行走装置多为履带式行进结构,由于履带与黑板面接触面积较大,使其转向阻力大,转向半径大,转向灵活性较差。又或是吸附采用永磁铁,其吸附力不可调节,导致运动阻力较大,降低其运动性能和安全性能,不能适用于多种类型黑板。
以公告号为CN105730103A的中国发明专利公开的一种擦黑板机器人为例,该装置包括,本体、本体上设有行走机构和擦除机构,以及与行走机构和擦除机构连接的控制系统;所述永磁铁固定连接在滑膛壁上,并对称分布,将本体吸附于黑板上;所述擦除机构采用电磁驱动,通过振动清除黑板上字迹。使用这种擦黑板机器人,虽然实现了沿指定路径自动擦除黑板并吸储粉笔灰尘的功能,但其永磁铁位置不可调整,无法根据不同铁磁性黑板调整磁力大小,电磁驱动的擦除机构会与永磁铁互相产生磁场干扰,导致两机构失灵,无法达到理想清洁效果,甚至因吸附力不足而掉落,引发安全事故。所述擦黑板机器人使用零件复杂,价格昂贵。
鉴于此特提出本发明。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种吸附式擦黑板机器人。
根据本发明提供的一种吸附式擦黑板机器人,包括壳体、磁铁、行走机构以及擦除机构;
所述壳体包括顶板和底板,多个所述磁铁间隔设置于所述底板上;
所述行走机构包括第一电机、行走轮和万向轮,两个行走轮转动连接于所述底板相对的两侧,所述第一电机与所述行走轮传动连接,两个所述万向轮转动连接于所述底板相对的两端,两个所述行走轮的连线与两个所述万向轮连线交叉成十字形;
所述擦除机构包括毛刷盒、滑槽、第二电机、蜗轮蜗杆以及转盘,所述滑槽固定于所述底板上,所述毛刷盒滑动连接于所述滑槽内,所述毛刷盒的下端面安装有毛刷,所述毛刷延伸至所述底板之外,所述第二电机安装于所述顶板上,所述第二电机、所述蜗轮蜗杆和所述转盘依次传动连接,所述转盘远离其圆心的位置设有转轴,所述转轴与所述毛刷盒连接并带动所述毛刷盒沿所述滑槽往复运动。
一些实施方式中,所述毛刷盒上端面开设有导向槽,所述导向槽的轴线方向与所述毛刷盒的运动方向垂直,所述转轴伸入所述导向槽内并滑动连接。
一些实施方式中,所述滑槽包括第一滑板和第二滑板,所述第一滑板和所述第二滑板连接于所述底板上,所述毛刷盒夹持于所述第一滑板和所述第二滑板之间并可滑动。
一些实施方式中,所述第一滑板和所述第二滑板上设置有对称的滑孔,所述毛刷盒的两侧面设有滑柱,两侧的所述滑柱分别伸入所述滑孔内并沿所述滑孔滑动。
一些实施方式中,所述滑孔表面设置有一层铜片,所述滑柱的表面与所述铜片接触。
一些实施方式中,还包括磁铁安装架,所述磁铁安装架为凹槽结构,所述磁铁置于所述磁铁安装架的凹槽内,所述磁铁安装架连接于所述底板上,所述磁铁与所述底板之间的高度可调节。
一些实施方式中,还包括吸尘机构,所述吸尘机构包括吸管和风机,所述风机安装于所述底板上,所述吸管的一端与所述风机的吸风口连通,所述吸管的另一端与所述毛刷盒连通,所述毛刷盒的下端面开设有多个吸尘孔。
一些实施方式中,所述毛刷盒内设置有滤网,所述滤网设置于所述吸管与所述毛刷盒连通的接口和所述吸尘孔之间。
一些实施方式中,所述毛刷盒为分体结构,包括第一盒体和第二盒体,所述第一盒体和所述第二盒体以抽屉式的方式插合连接,所述第一盒体和所述第二盒体为过盈配合。
一些实施方式中,所述擦除机构为两组,固定于所述底板上两组所述滑槽相互平行。
与现有技术相比,本发明具有如下的有益效果:
1、本发明提供的磁吸附式擦黑板机器人结构紧凑,操作方便,擦除效果好。
2、本发明通过设计分体结构的滑槽,使得滑槽可适用不同型号的毛刷盒,同时优化滑槽与毛刷盒的适配结构,降低滑槽与毛刷盒的摩擦阻力。
3、本发明通过设置磁铁安装支架,有效解决了机器人与黑板之间磁吸力的调节问题,使得机器人可适应不同种类的黑板。
4、本发明通过设置吸尘机构以及毛刷盒的适配性优化改进,提高黑板擦除过程中的粉尘吸附效果,减少粉尘污染。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
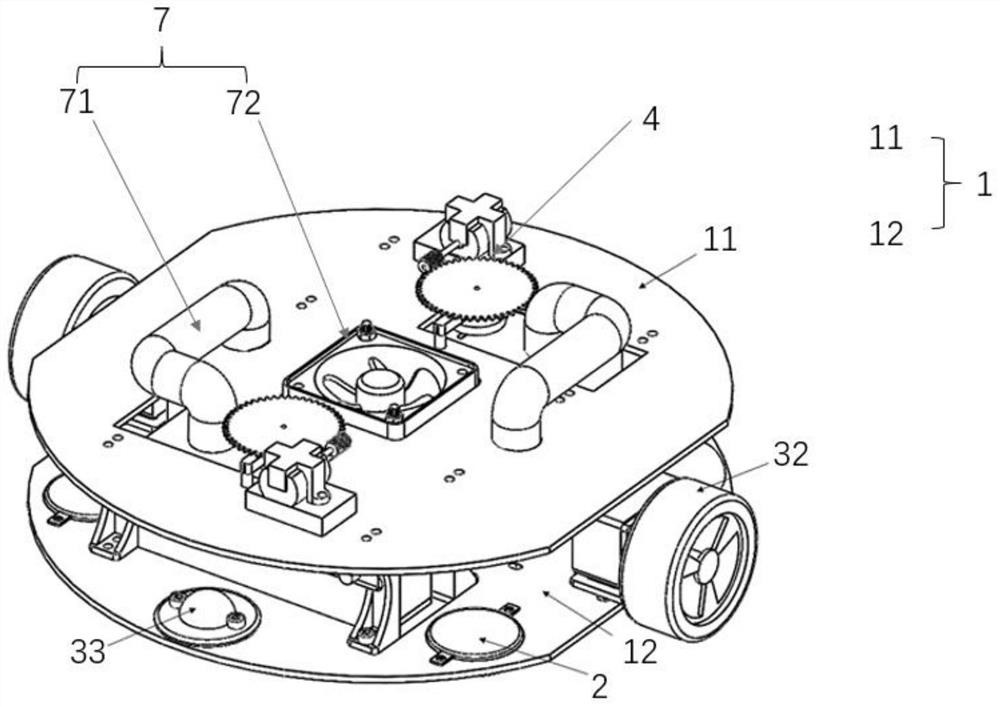
图1为本发明装置的整体结构示意图;
图2为本发明装置去掉上板后的内部结构示意图;
图3为本发明装置的仰视图;
图4为图3的A-A面剖视图;
图5为本发明装置的擦除装置结构示意图;
图6为本发明装置的毛刷盒装配示意图;
图7为本发明装置的铷铁硼磁铁安装示意图。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
实施例1
本发明提供了一种吸附式擦黑板机器人,包括壳体1以及设置在壳体1上的铁磁2、行走机构3以及擦除机构4。壳体1为上下壳体结构,主要包括顶板11和底板12,顶板11和底板12作为其他构件安装的基板,其上设置开设有相应的凹槽、孔等结构,方便其他构件的安装与固定。顶板11和底板12两者可为圆形板、矩形板,优选为跑道型结构板。跑道型结构的顶板11和底板12的直线的两侧面可提供行走轮的安装空间。磁铁2优选为铷铁硼磁体,其安装固定于底板12上且为多个,多个磁铁2优选沿底板12的周向间隔分布。优选的,底板12为跑道型结构板时,磁铁2固定于底板12的四角位置,通过磁铁2与黑板之间产生磁吸力,使得机器人能够吸附于黑板上。
行走机构3包括第一电机31、行走轮32以及万向轮33。第一电机31提供动力驱动行走轮32前后移动以及转向,万向轮33作为辅助从动轮,确保机器人运行的平稳,特别是转向动作时的稳定性。第一电机31固定于底板12上,两个行走轮32分别固定连接于底板12相对的两侧边,并且第一电机31与行走轮32传动连接并驱动行走轮32前行或后退。优选的,两个行走轮32固定于底板12横向中轴线的两端。两行走轮32与第一电机31的传动连接存在多种形式,一种连接方式可为第一电机31为差速电机,通过与两行走轮32传动连接的两半轴转速的设置实现机器人的前行、后退以及转向;另外一种连接方式是第一电机31为两台,两台第一电机31分别独立控制一个行走轮32,通过两台独立运转的第一电机31的转速设置实现前行、后退以及转向的目的。优选的,两个万向轮33位于底板12竖向中轴线上。此时两个行走轮32的连线与两个万向轮33的连线交叉成十字型。
擦除机构4用于擦除黑板上的字迹,主要包括有毛刷盒41、滑槽42、第二电机43、蜗轮蜗杆44以及转盘45。毛刷盒41为腔体结构,其形状优选为方形盒体,在其下端面上设置毛刷411,其毛刷411用于和黑板接触并擦除黑板上的字迹。滑槽42固定于底板12上,其毛刷盒41滑动安装于滑槽42内,滑槽42用于使得毛刷盒41的运动方向沿滑槽42的轴线方向运行,且滑槽42内的毛刷盒41所对应的底板12上开设有用于使毛刷411透出的孔,其毛刷411的部分或者全部位于底板12的外侧。第二电机43、蜗轮蜗杆44以及转盘45依次转动连接,第二电机43安装于顶板11上,蜗轮蜗杆44的蜗杆与第二电机42转动连接,蜗轮蜗杆44的涡轮可通过转动轴与转盘45转动连接,转盘45上设置有转轴451,转轴451远离转盘45的圆心位置,其转轴451与毛刷盒41连接并带动毛刷盒41沿滑槽42的轴线往复运动。优选的,毛刷盒41的上端面开设有导向槽412,其导向槽412沿着垂直于毛刷盒41运动的方向开设,转轴451置于导向槽412内,转轴451的外径与导向槽412的宽度基本相同,使得转盘45随蜗轮蜗杆44转动时,通过置于导向槽412内的转轴451带动毛刷盒41沿滑槽42的轴向往复移动。
本发明的工作原理为:将磁吸附式擦黑板机器人置于黑板上后,两个行走轮32和两个万向轮33的轮面以及毛刷411均与黑板的表面相接触,底板12与黑板表面之间存在一定的间距,此时,通过设置于底板12上的磁铁2与黑板之间产生的磁吸力使得机器人吸附于黑板上。启动第一电机31驱动行走轮32于黑板面上向前、向后或转向行走至待擦除的区域内,第二电机43带动蜗轮蜗杆44转动,蜗轮蜗杆44则带动转盘45旋转,而远离转盘45圆心一定位置的转轴451则推动毛刷盒41沿着滑槽42的轴向滑槽面往复滑动,进而通过毛刷411的往复滑动将黑板面上的字迹进行擦除。本申请提供的磁吸附式擦黑板机器人结构紧凑,操作方便,擦除效果好。
优选的,设置于底板12上的擦除机构4为两组,两组擦除机构4间隔一定距离设置,两组擦除机构4上的滑槽42相互平行,使得即毛刷的移动方向相一致,可进一步提高擦除效果。
实施例2
本实施例2是在实施例1的基础上形成,通过设计分体结构的滑槽,使得滑槽可适用不同型号的毛刷盒,同时优化滑槽与毛刷盒的适配结构,降低滑槽与毛刷盒的摩擦阻力。具体地:
滑槽42为两块滑板构成,包括有第一滑板421和第二滑板422,第一滑板421与第二滑板422间隔一定距离后相互平行地固定于底板12上,毛刷盒41滑动安装于第一滑板421和第二滑板422之间。毛刷盒41和第一滑板421、第二滑板422三者优选通过孔与柱的配合实现毛刷盒41的滑动,具体为:毛刷盒41的两侧面设置有凸起的滑柱413,第一滑板421和第二滑板422上分别开设有滑孔423且两滑孔对称设置。滑孔423优选为跑道型并分别沿第一滑板421和第二滑板422的轴向方向设置,两侧的滑柱413分别伸入第一滑板421和第二滑板422的滑孔423内,通过滑柱412和滑孔423的配合可使得毛刷盒41实现滑动。滑槽42通过分体的滑板组合形成,即可根据毛刷盒41的大小进行槽宽的调节,同时分体的滑槽42与毛刷盒41设置相适配的滑孔423和滑柱413,可使得毛刷盒41的侧面与滑槽42的内表面保持一定的间隙,降低滑动摩擦阻力。
进一步的,于滑孔423的表面设置有一层铜片,其铜片较薄,可通过胶粘等方式置于滑孔423的表面。滑孔423的表面设置一层铜片,由铜片与滑柱413的表面相接触,可有效降低滑柱413与滑孔423的摩擦力,同时还可提高散热效果。
实施例3
本实施例3是在实施例1或实施例2的基础上形成,通过设置磁铁安装支架,有效解决了机器人与黑板之间磁吸力的调节问题,使得机器人可适应不同种类的黑板。具体地:
磁铁2通过磁铁安装架6固定于底板12上,其磁铁安装架6为凹槽结构,优选通过薄钢片折成两侧为条状双耳片体,中间为凹字型的承托片体,其磁铁2放置于磁铁安装架6中间的凹槽内。磁铁安装架6与底板12的连接方式,优选通过在底板12上开设有凹槽,将磁铁安装架6中部的凹槽嵌入底板12上开设的凹槽内,通过调整磁铁安装架6两侧的双耳片体与底板12之间高度即可调整磁铁2与底板12竖直方向的相对位置,进而调整磁铁2与黑板之间的间距。其磁铁安装架6两侧的双耳片体与底板12之间的高度调整可通过加减垫片的方式实现。
实施例4
本实施例4是在实施例1-3任一实施例的基础上形成,通过设置吸尘机构以及毛刷盒的适配性优化改进,提高黑板擦除过程中的粉尘吸附效果,减少粉尘污染。具体地:
设置与毛刷盒41相连通的吸尘机构7,其吸尘机构7包括吸管71和风机72。风机72坐落于底板12上,当底板12上安装有两组擦除机构4时,风机72安装于两组擦除机构4的之间,具体的是安装于两组滑槽42之间,方便吸管71与两侧的毛刷盒41进行连通。吸管71的一端与风机72的吸风口相连通,另一端与毛刷盒41上开设的缺口相连通,优选的在毛刷盒41的上端面开设缺口,吸管71的另一端连接于毛刷盒41上端面的缺口上。相应的,毛刷盒41设置有毛刷411的下端面上开设有相应的吸尘孔414,多个吸尘孔414均布于毛刷盒41的下端面上。吸管71优选为PE塑料波纹管
当毛刷411通过毛刷盒41的往复摆动将黑板上的字迹清除时,风机72产生的吸力通过吸管71抽吸毛刷盒41内的气体,使得毛刷盒41内呈负压状态,此时擦除的粉尘即通过吸尘孔414进入到毛刷盒41内,从而完成粉尘的吸附与收集。
优选的,在毛刷盒41内设置有滤网415,其滤网415设置于吸尘孔414与吸管72和毛刷盒41连通的结构之间,滤网415用于拦截自吸尘孔414进入毛刷盒41内的粉尘,避免粉尘直接通过吸管71进入到风机72内而造成风机72的损坏。
优选的,为方便粉尘的清理,毛刷盒41设置为抽屉式的分体结构,包括第一盒体4101和第二盒体4102,第一盒体4101插接于第二盒体4102内,且第一盒体4101和第二盒体4102两者优选为过盈配合,方便灰尘清理同时,确保毛刷盒的密封性与结构的牢固性。
在本申请的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
- 一种吸附式擦黑板机器人
- 一种磁吸附式擦黑板爬壁机器人