高精度锯榫钻机
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及木工加工设备技术领域,尤其涉及一种高精度锯榫钻机。
背景技术
目前,数控木工加工设备上,对工件进行加工,一般需要对工件的端部和侧部进行加工,如在工件的顶端或者侧边进行钻孔、铣槽等加工。现有的机器一般都是将工件在机体上进行传送,在不同的工位设置加工刀具。
在加工木工的榫卯结构时,由于榫卯结构在加工后需要配合使用,如多个木条形成方形结构,榫卯连接处配合端面均需要45度,以使装配后的木条垂直,配套加工会提高榫卯精度,便于后期的装配。但是,现有的木工加工设备主要还是单独加工,导致后期装配精度较差。
发明内容
为了克服现有技术的不足,本发明的目的在于提供高精度锯榫钻机,其可两个抵靠板垂直设置,工件抵靠后呈45度加工,加工后直接装配,且定位精度高。
本发明的目的采用以下技术方案实现:
高精度锯榫钻机,包括,
机体,机体上设有加工平台以及加工平台驱动件,所述加工平台上设有两个垂直抵接设置的抵靠板;所述抵靠板用于供工件抵靠;所述加工平台驱动件用于带动所述加工平台沿一加工方向运动;
定位组件,定位组件安装于所述机体上,定位组件包括定位靠板以及定位靠板驱动件,所述定位靠板设于加工平台的一侧并用于供工件抵靠定位;所述定位靠板具有抵靠面,所述抵靠面与其中一个抵靠板平行;所述定位靠板驱动件用于带动所述定位靠板靠近或者远离所述加工平台运动;
加工刀具,加工刀具设于加工平台的一侧,并用于对工件进行加工;所述定位组件、加工刀具在所述加工方向上间隔分布。
进一步地,所述定位靠板在加工方向的两侧均设有所述抵靠面,其中一个抵靠面与其中一个定位靠板平行;另一个抵靠面与另一个定位靠板平行。
进一步地,所述加工平台上设有两个推压导向组件,各个推压导向组件与各个抵靠板对应间隔设置;推压导向组件包括推压杆、推压轮以及推压杆驱动件,所述推压杆的一端铰接于加工平台上,所述推压轮枢接于推压杆的另一端;所述推压轮与抵靠板间隔设置;所述推压杆驱动件用于带动推压杆转动。
进一步地,所述推压导向组件还包括移动板,所述推压杆、推压轮以及推压杆驱动件均安装于移动板上;所述移动板可沿所述加工方向移动。
进一步地,机体上还设有第一画线锯、第一画线锯驱动件以及第一画线锯升降驱动件,所述第一画线锯枢接于机体上,所述第一画线锯驱动件用于带动所述第一画线锯转动;所述第一画线锯位于定位组件以及加工刀具之间;所述第一画线锯升降驱动件用于带动所述第一画线锯沿机体的高度方向运动。
进一步地,所述加工平台上设有垫板,所述垫板用于抵靠其中一个抵靠板。
进一步地,所述机体上还设有第二画线锯以及第二画线锯驱动件,所述第二画线锯位于第一画线锯与加工刀具之间;所述第二画线锯驱动件用于带动第二画线锯转动。
进一步地,所述加工平台的上方还设有压块组件,所述压块组件包括压块以及压块驱动件,所述压块设于加工平台上方,所述压块驱动件用于带动压块沿机体的高度方向运动。
进一步地,所述压块的底端为斜面。
进一步地,抵靠板上还设有光栅尺,所述光栅尺可沿抵靠板的延伸方向运动。
相比现有技术,本发明的有益效果在于:其在进行加工时,可将两个工件同时抵靠在两个抵靠板上,两个工件的端部垂直设置,在加工之前,通过定位靠板的抵靠面抵靠定位,两个工件呈45度定位摆放,便于两个工件抵靠稳定,定位精度高;此后通过加工刀具进行加工,两个工件直接加工形成的榫卯结构呈45度角度配合,加工效率高,提高后期装配精度。
附图说明
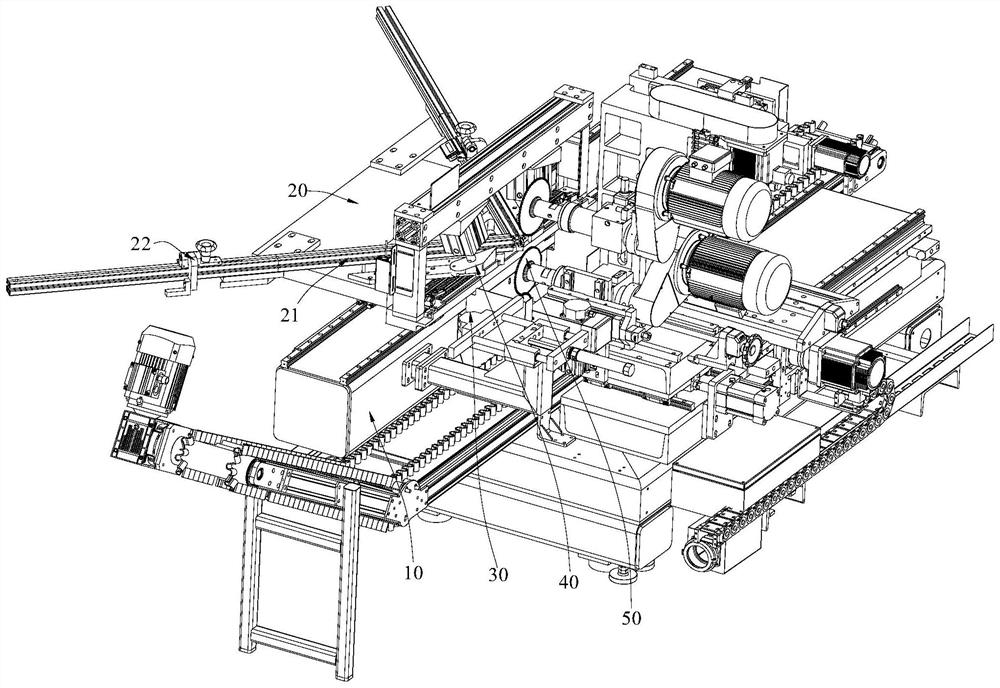
图1为本发明的结构示意图;
图2为本发明的加工平台的结构示意图;
图3为本发明的定位组件、第一画线锯、第二画线锯以及加工刀具在机体上的装配结构示意图;
图4为本发明的定位组件的结构示意图;
图5为本发明的压块组件的结构示意图;
图6为本发明的推压导向组件的结构示意图;
图7为本发明的第一画线锯的结构示意图;
图8为本发明的第二画线锯的结构示意图。
图中:10、机体;20、加工平台;21、抵靠板;22、光栅尺;23、垫板;30、定位组件;31、定位靠板;311、抵靠面;32、定位靠板驱动件;40、压块组件;41、压块;411、斜面;42、压块驱动件;50、第二画线锯;51、第二画线锯驱动件;60、推压导向组件;61、推压轮;62、推压杆;63、推压杆驱动件;70、第一画线锯;71、第一画线锯驱动件;72、第一画线锯升降件;80、加工刀具;90、废料输送组件。
具体实施方式
下面,结合附图以及具体实施方式,对本发明做进一步描述:
在本发明的描述中,需要说明的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在限制本发明。
如图1-8所示的高精度锯榫钻机,包括机体10、定位组件30以及加工刀具80,在机体10上设有加工平台20以及加工平台20驱动件,加工平台20上设有两个抵靠板21,两个抵靠板21的端部垂直抵接设置。该抵靠板21可供工件抵靠,两个抵靠板21便可供两个工件呈90度垂直抵靠状态。另外,加工平台20驱动件用于带动加工平台20沿一加工方向运动。
具体定位组件30包括定位靠板31以及定位靠板驱动件32,将定位靠板31设于加工平台20的一侧,该定位靠板31也可供工件抵靠定位,定位靠板31具有抵靠面311,抵靠面311与其中一个抵靠板21平行;定位靠板驱动件32用于带动定位靠板31靠近或者远离加工平台20运动。加工刀具80设于加工平台20的一侧,并用于对工件进行加工;定位组件30、加工刀具80在加工方向上间隔分布。
在上述结构基础上,使用本发明的高精度锯榫钻机时,在进行加工时,可将两个工件同时抵靠在两个抵靠板21上,两个工件的端部垂直设置,在加工之前,可先通加工平台20驱动件,带动加工平台20运动至定位组件30处,然后定位靠板驱动件32可带动定位靠板31朝向加工平台20运动,抵靠面311并抵接工件远离抵靠板21的侧面,由于抵靠面311与抵靠板21的延伸方向平行,因而抵靠面311与工件抵靠后,可将工件紧贴在抵靠板21上,经过定位抵靠后,两个工件便可与两个抵靠板21的夹角等分线呈45度夹角定位摆放,便于两个工件抵靠稳定,定位精度高。
此后通过加工平台20驱动件带动加工平台20运动至加工刀具80处进行加工,加工刀具80可对两个工件的端部进行加工,由于加工方向为直线方向,因而两个工件依次推送至加工刀具80后,切割形成的端面为相互配合的45度斜面411,再经过榫卯结构的加工,后期直接装配,精度较高。
在两个工件的同一端部加工完成后,可将工件调换一个端部,再次装夹在抵靠板21上,进行另一个端部的加工,同样经过上述定位组件30的抵靠面311的定位,由于抵靠面311的角度不变,因而加工形成的端面倾斜角度相同。
需要说明的是,上述加工平台20驱动件可选用为现有技术中的丝杆传动机构来实现,丝杆传动机构采用螺纹配合传动,驱动精度较高。而定位靠板驱动件32则可选用为气缸。
进一步地,本实施例定位靠板在加工方向的两侧均设有抵靠面311,其中一个抵靠面311与其中一个定位靠板31平行;另一个抵靠面311与另一个定位靠板31平行,即在工件定位抵靠时,加工平台20驱动件先带动在加工方向上靠前的其中一个工件和与之平行的其中一个抵靠面311进行抵靠定位,此后加工平台20驱动件继续推进加工平台20,在加工方向上靠后的另一个工件便可与与之平行的另一个抵靠面311进行抵靠定位,同一个定位靠板31实现双向定位,定位效率更好。
当然,也可在机体10上设置两个定位组件30,不同的定位组件30的定位靠板31具有与不同抵靠板21平行的抵靠面311。
进一步地,加工平台20上设有两个推压导向组件60,各个推压导向组件60与各个抵靠板21对应间隔设置,即在工件抵靠在抵靠板21后,推压导向组件60位于工件相对抵靠板21的外侧。
具体推压导向组件60包括推压杆62、推压轮61以及推压杆驱动件63,推压杆62的一端铰接于加工平台20上,推压轮61枢接于推压杆62的另一端;推压轮61与抵靠板21间隔设置;推压杆驱动件63用于带动推压杆62转动。
在工件加工时,可通过推压杆驱动件63带动推压杆62靠近抵靠板21转动,推压杆62上的推压轮61便可与工件外侧抵接,防止工件推入或加工过程中跑偏;而推压轮61与工件的外侧面滚动配合,也使工件具有一定自由度,避免直接压紧在加工过程中出现卡死的情况。
更具体的是,上述推压导向组件60还包括移动板,将推压杆62、推压轮61以及推压杆驱动件63均安装于移动板上,移动板可沿加工方向移动。具体可在加工平台20上设置沿加工方向延伸的滑槽,移动板通过滑轨与滑槽滑动配合,如此,可根据工件的宽度使推压轮61的位置可调,适用于不同宽度工件加工。
当然,上述的推压杆驱动件63可选用为现有技术中的气缸,气缸的活塞杆与推压杆62铰接即可。
进一步地,本实施例中,可在机体10上还设有第一画线锯70、第一画线锯驱动件71以及第一画线锯70升降驱动件,具体第一画线锯70枢接于机体10上,该第一画线锯驱动件71可带动第一画线锯70转动,该第一画线锯70位于定位组件30以及加工刀具80之间,上述第一画线锯70升降驱动件用于带动第一画线锯70沿机体10的高度方向运动。
在上述结构基础上,在加工平台20沿加工方向运动时,加工平台20上的工件可先经过第一画线锯70,第一画线锯70可先在第一画线锯升降件72的带动向上运动,同时第一画线锯驱动件71带动第一画线锯70转动,如此,转动的第一画线锯70可在工件端部的底端边沿先切割形成加工线槽,此后,加工平台20再经加工平台20驱动件的带动运动至加工刀具80处,进行铣削加工。
由于在实际加工过程中,木板直接铣削容易形成的刀口端面容易撕裂,因而可先通过第一画线锯70先进行切割形成加工线槽,后期铣削时直接在加工线槽处进行铣削即可,防止加工完成后的端面撕裂,形成的加工端面更加平滑,加工精度更高。
在其中一个工件加工完成后,第一画线锯70可先下降避空,供另一个工件输送到位,第一画线锯70再上升进行画线加工即可。
进一步地,加工平台20上设有垫板23,垫板23可抵靠其中一个抵靠板21,其中一侧工件放置处设有垫板23,具体该垫板23可设置在加工方向上相对靠后的抵靠板21上,如此,工件装夹到位后,在加工方向上前后分布的两个工件放置高度位置不同,即在第一画线锯70对在加工方向上,前一高度较低的工件在运动至第一画线锯70上方时,第一画线锯70此时可在第一画线锯升降件72的作用下向上运动,第一画线锯70便可在转动过程中毒前一工件加工,此后,加工平台20沿加工方向移动,推送在后的另一工件至第一画线锯70处,由于垫板23的作用,因而可进行避空,然后再通过第一画线锯70向上运动进行加工即可。
进一步地,机体上还设有第一画线锯移动件,该第一画线锯70移动件可带动第一画线锯70在水平方向靠近或者远离所述加工平台,即第一画线锯移动件可带动第一画线锯70运动,调整第一画线锯与加工平台之间的间隔,从而调整第一画线锯与工件端部的间距,便于加工。当然,第一画线锯移动件也可选用为气缸结构来实现。
更具体的是,可在机体10上还设有第二画线锯50以及第二画线锯驱动件51,该第二画线锯50位于第一画线锯70与加工刀具80之间,即第一画线锯70、第二画线锯50以及加工刀具80在加工方向上依次分布,而第二画线锯驱动件51用于带动第二画线锯50转动。
如此,在加工方向上的前后分布第二画线锯50和第一画线锯70,第二画线锯50的高度可高于第一画线锯70,即在加工方向上前后分布的第二画线锯50、第一画线锯70可分别对两个工件的端部底端进行画线,加工效率更高。
当然,第二画线锯50也可是另一种作用,即工件在经过第一画线锯70切割形成加工线槽后,加工平台20带动工件推送至第二画线锯50,第二画线锯驱动件51带动第二画线锯50转动,可在工件端部的顶端切割形成加工线槽。具体可以根据实际需要进行选择。
需要说明的是,上述带动第一画线锯70以及第二画线锯50转动的第一画线锯驱动件71和第二画线锯驱动件51均可选用为现有技术中的电机或电机配合传动机构(齿轮传动、皮带传动等)等结构来实现。而第一画线锯升降件72则可选用气缸等直线运动输出机构来实现。
进一步地,还可在加工平台20的上方还设有压块组件40,具体压块组件40包括压块41以及压块驱动件42,将压块41设于加工平台20上方,上述压块驱动件42可带动压块41沿机体10的高度方向运动,如此,在工件装夹并抵靠在上述抵靠板21后,可通过压块驱动件42带动压块41向下运动,压块41向下运动过程中,可抵接在工件的顶端面上,对工件的定位结构更加稳定。
更具体的是,上述压块41的底端为斜面411,即在压块41向下运动过程中,压块41底端的斜面411与工件端面抵接,斜面411可将纵向力分解为横向力,该横向力可推动工件靠近抵靠板21运动,使工件紧贴在抵靠板21的端面上,如此,定位压紧效果更好。
当然,上述压块驱动件42可选用为现有技术中的气缸来实现,气缸的活塞杆与压块41连接即可。
进一步地,还可在抵靠板21上还设有光栅尺22,该光栅尺22可沿抵靠板21的延伸方向运动,如此,在工件第一次装夹加工时,光栅尺22可测量工件装夹尺寸,在工件其中一个端部加工完成后,工件调转安装,可直接根据光栅尺22的测量尺寸进行装夹,精度更好。
进一步地,还可在机体10上设有废料输送组件90,该废料输送组件90包括输送皮带以及两个输送辊,两个输送辊枢接在机体10在加工方向的两端;输送皮带的两端分别枢接于两个输送辊外,输送辊在电机的带动下,输送辊转动可带动输送皮带转动,输送皮带位于加工刀具80、第一画线锯70、第二画线锯50的下方,输送皮带可接收在加工过程中产生的木屑,输送皮带便可将木屑输送至机体10外,进行统一回收。
对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
- 高精度锯榫钻机
- 高精度锯榫钻机