一种用于道面微小目标检测的车载探测系统
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及道面检测技术领域,具体涉及一种用于道面微小目标检测的车载探测系统。
背景技术
机场跑道的道面上经常会出现一些异物,如:飞机降落时因颠簸而掉落的螺丝、轮胎摩擦掉落的橡胶碎片、被风刮来的塑料瓶、乘客或场务组遗落的工具等。出现在机场跑道道面上的异物会造成非常严重的危害,实际案例表明,机场跑道道面上的异物有可能被飞机的发动机吸入,导致发动机失效,造成严重事故。因此机场跑道道面的异物需要及时清理,体积较大的目标容易被发现,而体积较小的目标则难于发现且对飞机安全具有较大威胁。
目前国内机场主要靠人工巡视跑道、靠人眼搜寻异物,即,场务人员并排从跑道一端步行巡视到另一端,这种方法效率较低,并且需要较多地占用宝贵的跑道使用时间,导致航班次数被迫减少。还有一些科研单位提出了利用摄像头对跑道异物进行探测的方法,但容易受天气条件和光照的影响,在夜晚或恶劣天气情况下检测性能下降,并且不能发现与道面颜色相近的异物。
发明内容
有鉴于此,本发明提供了一种用于道面微小目标检测的车载探测系统,具有检测效率高、准确性高、能够实现全天时和全天候稳定探测的特点。
本发明采用以下具体技术方案:
一种用于道面微小目标检测的车载探测系统,包括移动平台、毫米波雷达、实时处理机、差分卫星导航、显控终端以及电源;
所述毫米波雷达、所述实时处理机、所述显控终端以及所述电源均固定安装于所述移动平台上;
所述毫米波雷达与所述实时处理机之间信号连接,用于发射毫米波、接收回波信号以及信号预处理,并将预处理回波数据发送给所述实时处理机;
所述实时处理机与所述显控终端之间信号连接,用于对接收的所述预处理回波数据进行实时处理,并将处理结果发送给所述显控终端;
所述显控终端与所述毫米波雷达和所述差分卫星导航之间信号连接,用于控制所述毫米波雷达、所述差分卫星导航以及所述实时处理机,并显示、存储和管理探测结果;
所述差分卫星导航与所述毫米波雷达和所述显控终端之间信号连接,用于提供导航信息;
所述电源与所述毫米波雷达、所述实时处理机、所述差分卫星导航以及所述显控终端之间电连接,用于提供电能。
更进一步地,所述差分卫星导航包括信号连接的基站和差分站;
所述差分站固定安装于所述移动平台,并与所述毫米波雷达和所述显控终端之间进行实时数据通信。
更进一步地,所述差分站与所述毫米波雷达和所述显控终端之间通过串口进行连接。
更进一步地,所述实时处理机与所述显控终端之间、所述实时处理机与所述毫米波雷达之间、以及所述毫米波雷达与所述显控终端之间均通过以太网连接。
更进一步地,所述实时处理机对所述预处理回波数据进行合成孔径处理、目标检测处理以及FOD高精度定位处理。
更进一步地,所述显控终端具有人机交互界面。
更进一步地,所述移动平台为汽车。
有益效果:
上述用于道面微小目标检测的车载探测系统采用移动平台实现沿道面的移动,通过毫米波雷达对道面的微小目标进行探测和成像,通过实时处理机对毫米波雷达的探测结果进行处理,结合差分卫星导航对微小目标进行定位,并在显控终端上进行显示;移动平台可以采用汽车等车辆作为载体,移动平台的移动速度可以达到80km/h,对于一条3km长的跑道,只需5min即可完成对整条跑道的准确检测,及时发现道面上入侵的异物,具有检测效率高的特点;同时,由于毫米波雷达具有穿透雾、烟、灰尘的能力强,且具有全天候、全天时、能分辨识别很小的目标、能同时识别多个目标的特点,因此,使得车载探测系统具有检测效率高、检测准确性高、能够实现全天时和全天候稳定探测的特点。
附图说明
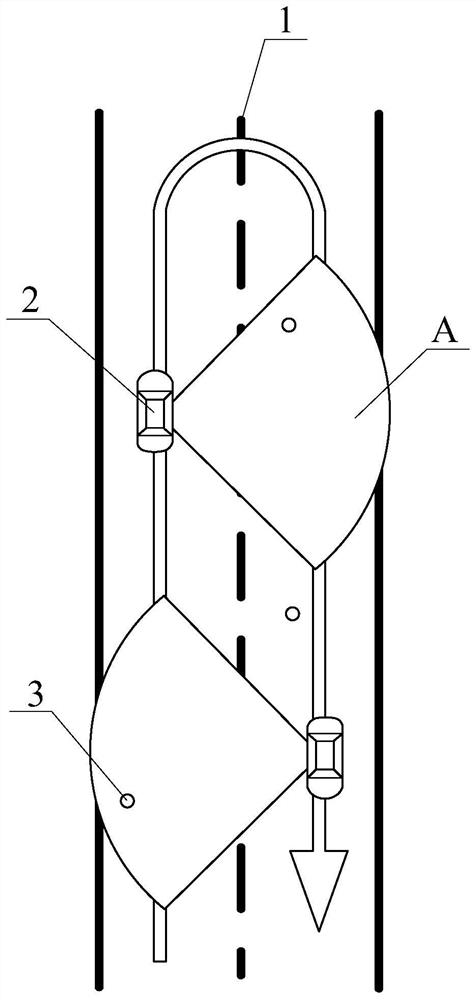
图1为本发明的车载探测系统的工作原理示意图;
图2为本发明的车载探测系统的结构原理示意图。
其中,1-跑道,2-移动平台,3-微小目标,4-毫米波雷达,5-实时处理机,6-差分卫星导航,7-显控终端,8-电源,9-基站,10-差分站,A-探测区域
具体实施方式
下面结合附图并举实施例,对本发明进行详细描述。
在本发明实施例中,FOD(Foreign Object Debris)为可能损伤航空器的某种外来的物质、碎屑或物体。
本发明提供了一种用于道面微小目标检测的车载探测系统,该车载探测系统可以用于机场跑道1,也可以用于其它类似路面、广场等空旷地面;上述车载探测系统包括移动平台2、毫米波雷达4、实时处理机5、差分卫星导航6、显控终端7以及电源8;移动平台2可以为汽车等具有快速移动功能的车辆;
毫米波雷达4、实时处理机5、显控终端7以及电源8均固定安装于移动平台2上;移动平台2为车载探测系统提供安装基础,并携带各部件沿道面快速移动,从而实现对道面的快速检测;实时处理机5与显控终端7之间、实时处理机5与毫米波雷达4之间、以及毫米波雷达4与显控终端7之间均通过以太网或者无线网络连接;
毫米波雷达4与实时处理机5之间信号连接,用于发射毫米波、接收回波信号以及信号预处理,并将预处理回波数据发送给实时处理机5;毫米波雷达4主要负责采集道面场景回波信号,具体包括宽带信号生成、调制、发射、接收、信号去斜、采集、预处理等功能;毫米波雷达4通过以太网接受显控终端7的控制,并通过以太网将预处理结果数据发送给实时处理机5;毫米波雷达4与差分卫星导航6连接,实时接收差分卫星导航6上传的导航信息;毫米波雷达4为工作在毫米波波段(millimeter wave)探测的雷达,毫米波的波长为1mm~10mm,介于微波和厘米波之间;
实时处理机5与显控终端7之间信号连接,用于对接收的预处理回波数据进行实时处理,并将处理结果发送给显控终端7;实时处理机5可以通过以太网接收毫米波雷达4发送的预处理回波数据,并对雷达回波信号进行实时处理,并将结果发送给显控终端7;实时处理机5对预处理回波数据进行的实时处理可以包括合成孔径处理、目标检测处理以及FOD高精度定位处理;
显控终端7与毫米波雷达4和差分卫星导航6之间信号连接,用于控制毫米波雷达4、差分卫星导航6以及实时处理机5,并显示、存储和管理探测结果;显控终端7可以具有方便用户操作的人机交互界面;显控终端7还具有协调控制车载探测系统的各个组成部分,展示当前FOD探测结果,引导用户清理外来物以及管理历史FOD信息等功能;
差分卫星导航6与毫米波雷达4和显控终端7之间信号连接,用于提供导航信息;导航信息可以为合成孔径处理需要的移动平台2的速度信息、辅助FOD高精度定位以及移动平台2的当前位置信息;差分卫星导航6可以包括信号连接的基站9和差分站10;差分站10固定安装于移动平台2,并与毫米波雷达4和显控终端7之间进行实时数据通信;差分站10与毫米波雷达4和显控终端7之间通过串口进行连接;基站9可以固定安装在室外的固定区域,如塔台等;
电源8与毫米波雷达4、实时处理机5、差分卫星导航6以及显控终端7之间电连接,用于提供电能;电源8还可以包括子电源,电源8可以为实时处理机5、显控终端7以及子电源8提供220V交流市电,而子电源用于为毫米波雷达4和差分卫星导航6的差分站10提供24V直流电。
上述车载探测系统在使用时,如图1所示,车载探测系统安装于汽车等移动平台2的一侧,移动平台2沿箭头指示的路径在跑道1内行快速移动,毫米波雷达4的天线朝向正侧方,工作时,移动平台2沿跑道1的左侧匀速直线行驶,毫米波雷达4对跑道1的右侧进行扫描,毫米波雷达4的探测区域A如图1所示,当移动平台2沿跑道1的右侧匀速直线行驶时,毫米波雷达4则扫描跑道1的左侧;当跑道1内具有异物等微小目标3时,毫米波雷达4则接收到回波信号,经过毫米波雷达4和实时处理机5对回波信号进行处理,结合差分卫星导航6对检测到的微小目标3进行定位后,将探测结果输出到显控终端7进行显示和保存,以便后续清理。
与现有技术相比,上述车载探测系统具有以下显著优势:
1、检测效率高
现有技术中,靠人工步行发现目标,整条跑道1巡视完需要半个小时以上;而采用本系统,移动平台2的行驶速度最大可达到80km/h,对于一条3km长的跑道1,只需要5min即可完成对整条跑道1的准确检测,极大的节约了检测时间,便于机场安排更多的航班。
2、检测准确性高
现有技术中通过场务组开车到跑道1上靠肉眼巡视,虽可提升检测速度,但纯靠肉眼很容易出现遗漏,导致微小目标3不能及时被发现;而采用本系统通过毫米波雷达4成像,对直径1cm以上的微小目标3均可以稳定检测,检测率在99.9%以上,极大的降低了因道面微小目标3而导致的风险。
3、全天时、全天候
现有技术中的光学检测系统在晴天、白天时检测可靠,但在夜间或阴雨天气时检测并不稳定,尤其当微小目标3和道面颜色接近时,检测能力更是大幅下降;而本系统基于毫米波雷达4探测原理,不受光照、目标颜色等影响,可以实现全天时、全天候的稳定探测。
上述车载探测系统的具体工作流程为:
首先,电源8启动,车载探测系统上电,毫米波雷达4与显控终端7、显控终端7与实时处理机5、实时处理机5与毫米波雷达4之间均建立网络连接,差分卫星导航6与显控终端7和毫米波雷达4之间均建立串口连接;
其次,移动平台2开始沿道面的边缘行驶,显控终端7对毫米波雷达4下发启动工作指令,毫米波雷达4启动工作,射频模块发射并接收信号,基带处理模块对信号以及实时导航数据进行打包,通过以太网将打包结果发送给实时处理机5;
然后,实时处理机5对接收数据进行成像、检测处理,并利用导航数据对检测到的微小目标3进行定位;实时处理机5将成像结果、检测结果发送给显控终端7进行展示;
最后,整条跑道1扫描结束后,进入FOD清理模式清理发现的异物。
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种用于道面微小目标检测的车载探测系统
- 一种基于红外热成像的车载视频微小目标检测方法