基于自动巡航的隧道内管片智能吊运系统及其工作方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及盾构施工领域,具体属于基于自动巡航的隧道内管片智能吊运系统的工作方法。
背景技术
地铁的修建往往通过人口密集区,所以无法大面积进行地表开挖,需要采用盾构开挖技术。盾构法施工虽有掘进速率快、施工质量高、对周边环境干扰小、施工安全性较高等优势,也在我国的应用迎来了发展高潮,但施工智能化、自动化还处于初期探索阶段,需要大量的人工干预,大部分环节需要人员操作,只有极少部分可以实现少人化或无人化。隧道内管片吊运采用双轨梁配合工人完成的,自动化智能化程度低,管片吊运作业人员频繁操作易发生疲劳,管片吊运固定不到位发生人身伤害事故,长期在隧道内施工也易造成作业人员健康受损,再加上劳务作业人员老龄化原因,制约着盾构的施工效率,增加了施工成本。
发明内容
本发明的目的是提供基于自动巡航的隧道内管片智能吊运系统的工作方法,要解决现有技术人工操作起吊设备转运盾构管片耗时耗力,施工效率低的技术问题。
为实现上述目的,本发明采用如下技术方案:
基于自动巡航的隧道内管片智能吊运系统,其特征在于:包括盾构管片采料系统、无人自动驾驶电瓶车、盾构机喂片机和盾构工业电脑,盾构工业电脑用于总控整个系统,驱动盾构管片采料系统用于向无人自动驾驶电瓶车运动以采料、向盾构机喂片机运动以送料,盾构机喂片机接料后进行盾构管片的安装准备工作;
所述盾构管片采料系统包括沿盾构机的桥架部位和1号台车上半部分通长布置的行走轨道梁,以及挂设在行走轨道梁上的钢框架,所述钢框架通过设于钢框架上部的行走轮和驱动电机沿行走轨道梁行走,所述钢框架上设有用于总控整个盾构管片采料系统的数据指令控制机构、用于识别盾构管片的图像识别机构、用于运输识别盾构管片的吊运机构和用于测量盾构管片采料系统相对位置的测量装置、用于控制机械臂操作台沿钢框架横向移动的液压千金顶和用于控制液压千斤顶的液压泵站,所述测量装置包括设于钢框架上的激光测距仪与定位于盾构机喂片机前方的激光靶,所述吊运机构包括自上而下顺次设于钢框架底面的滑块、机械臂操作台、竖向可调机械臂和位于竖向可调机械臂底面的真空吸盘吊具。
进一步优选地,所述盾构管片采料系统整体呈对称结构,包括两条平行设置的行走轨道梁,所述行走轨道梁两端分别通过法兰盘与盾构机固定。
进一步地,所述钢框架呈U型结构,U型结构两竖部分别与两根行走轨道梁连接,所述驱动电机带动设于钢框架上的驱动轴,继而带动行走轮沿行走轨道梁下翼缘板行走,所述驱动电机为具有正反转功能的小型电机,所述驱动电机外置变频控制器,所述变频控制器通过有线形式接收数据指令控制机构发出的信号并执行该信号进而控制驱动电机运转,所述变频控制器通过无线形式接收盾构机工业电脑发出的信号并执行该信号进而控制驱动电机运转,且盾构机工业电脑发出的信号优先级高于数据指令控制机构发出的信号。
进一步优选地,所述激光测距仪通过吊杆与U型结构两竖部底面固定,所述激光测距仪的水平中垂线穿过所述激光靶靶心。
进一步地,所述竖向可调机械臂由若干节机械臂组成,相邻所述机械臂之间、机械臂与机械臂操作台之间设有关节轴承油缸,所述真空吸盘吊具设置带有变频控制器的蓄能器,变频器通过有线形式与数据指令控制机构连接。
此外,所述数据指令控制机构为单片机,通过有线数据与吊运机构、激光测距仪、驱动电机和图像识别机构接,通过无线通信设备与盾构工业电脑通信相连,盾构工业电脑通过数据指令控制机构驱动盾构管片采料系统。
更加优选地,所述盾构管片粘贴有用于图像识别机构采集信息的二维码。
基于自动巡航的隧道内管片智能吊运系统的工作方法,其特征在于,包括以下步骤:
步骤一,数据输入:盾构管片采料系统整体开机,盾构工业电脑将盾构机三维坐标信息、无人自动驾驶电瓶车三维坐标信息、管片二维码信息、激光靶三维坐标信息、盾构管片安装顺序、隧道信息输入数据指令控制机构,所述数据指令控制机构据激光测距仪测得与激光靶的间距确定盾构管片采料系统处于盾构机中的位置,机械臂处于折叠收缩状态;
步骤二,盾构管片采料系统首次确认待安装盾构管片信息:无人自动驾驶电瓶车将管片运输到位,并向盾构工业电脑反馈管片材料已运输到位及自身三维坐标信息,盾构工业电脑接收信息后反馈至数据指令控制机构,数据指令控制机构根据无人自动驾驶电瓶车三维坐标信息,分析盾构管片采料系统与无人自动驾驶电瓶车间距,指令驱动电机工作至无人自动驾驶电瓶车附近,图像识别机构开始扫描并识别无人自动驾驶上的盾构管片形状信息并将信息反馈至分析盾构管片采料系统;
步骤三,再次确认带安装盾构管片信息:数据指令控制机构根据图像识别机构识别的形状信息确定该盾构管片为待安装盾构管片后,继续指令驱动电机带动盾构管片采料系统的运行至待安装盾构管片处,计算机械臂操作台中心位置与管片中心位置间距,数据指令控制机构根据所计算间距,向液压泵站发出信号,液压泵站收到信号后,根据信号指令控制液压千斤顶移动,进而带动与滑块连接的机械臂操作台微调,使吊运机构处于盾构管片中心部位正上方,图像识别机构扫描盾构管片上二维码信息,再次与数据指令控制机构内存储的待安装盾构管片信息对比至一致,数据指令控制机构通过指令机械臂操作台使竖向可调机械臂工作,真空吸盘吊具触碰到管片中心部位,向数据指令控制机构反馈真空吸盘吊具已就位,数据指令控制机构向控制蓄能器的变频控制器发出信号,真空吸盘吊具吸取该待安装盾构管片;
步骤四,吊运至盾构机喂片机:数据指令控制机构根据激光测距仪测得与激光靶的间距,确定盾构管片采料系统与盾构机喂片机间距,并指令盾构管片采料系统运动至盾构机喂片机后,数据指令控制机构向控制蓄能器的变频器发出信号,真空吸盘吊具下放待安装盾构管片,机械臂折叠收缩,重复上述步骤,数据指令控制机构根据内存的盾构管片安装顺序信息,指令盾构管片采料系统顺次完成对标准块、临接块和封顶块的转运后,等待下一环隧道管片的隧道内吊运工作。
与现有技术相比本发明具有以下特点和有益效果:
本发明通过吊运机构对盾构管片进行识别、吸取、转运,加快施工进度,提高施工智能化,减少管片吊运作业人员,避免作业人员长期隧道内施工作业身体健康受到损害,节约人力成本,提高施工效率,降低施工成本。
附图说明
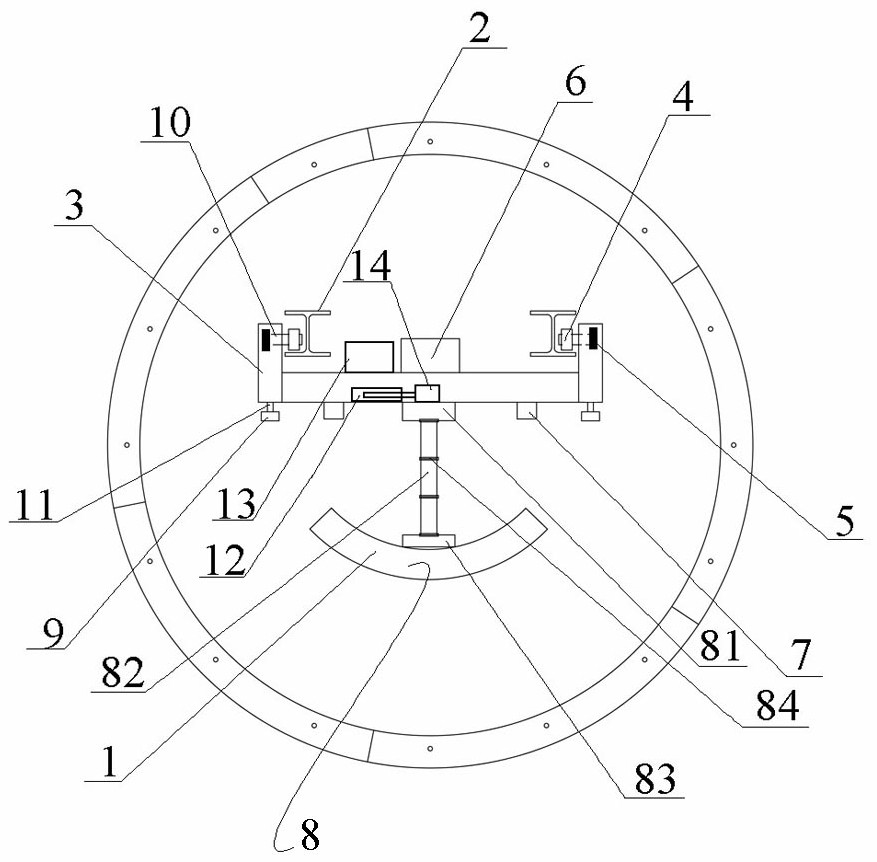
图1为本发明基于自动巡航的隧道内管片智能吊运系统的结构示意图。
附图标记:1-盾构管片;2-行走轨道梁;3-钢框架;4-行走轮;5-驱动电机;6-数据指令控制机构;7-图像识别机构;8-吊运机构;81-机械臂操作台;82-竖向可调机械臂;83-真空吸盘吊具;84-关节轴承油缸;9-激光测距仪;10-驱动轴;11-吊杆;12-液压千斤顶;13-液压泵站;14-滑块。
具体实施方式
为使本发明实现的技术手段、创新特征、达成目的与功效易于明白了解,下面对本发明进一步说明。
在此记载的实施例为本发明的特定的具体实施方式,用于说明本发明的构思,均是解释性和示例性的,不应解释为对本发明实施方式及本发明范围的限制。除在此记载的实施例外,本领域技术人员还能够基于本申请权利要求书和说明书所公开的内容采用显而易见的其它技术方案,这些技术方案包括采用对在此记载的实施例的做出任何显而易见的替换和修改的技术方案。
基于自动巡航的隧道内管片智能吊运系统,如图1所示,包括盾构管片采料系统、无人自动驾驶电瓶车、盾构机喂片机和盾构工业电脑,盾构工业电脑用于总控整个系统,驱动盾构管片采料系统用于向无人自动驾驶电瓶车运动以采料、向盾构机喂片机运动以送料,盾构机喂片机接料后进行盾构管片1的安装准备工作,盾构管片1粘贴有用于图像识别机构7采集信息的二维码;
盾构管片采料系统包括沿盾构机的桥架部位和1号台车上半部分通长布置的行走轨道梁2,以及挂设在行走轨道梁2上的钢框架3,钢框架3通过设于钢框架3上部的行走轮4和驱动电机5沿行走轨道梁2行走,钢框架3上设有用于总控整个盾构管片采料系统的数据指令控制机构6、用于识别盾构管片1的图像识别机构7、用于运输识别盾构管片1的吊运机构8和用于测量盾构管片采料系统相对位置的测量装置、用于控制机械臂操作台沿钢框架3横向移动的液压千斤顶12和用于控制液压千斤顶12的液压泵站13,测量装置包括设于钢框架3上的激光测距仪9与定位于盾构机喂片机前方的激光靶,吊运机构8包括自上而下顺次设于钢框架3底面的滑块12、机械臂操作台81、竖向可调机械臂82和位于竖向可调机械臂82底面的真空吸盘吊具83,滑块14内陷于设于钢框架3的轨道上,竖向可调机械臂82由若干节机械臂组成,相邻机械臂之间、机械臂与机械臂操作台81之间设有关节轴承油缸84,真空吸盘吊具83设置带有变频控制器的蓄能器,变频器通过有线形式与数据指令控制机构6连接,数据指令控制机构6为单片机,通过有线数据与吊运机构8、激光测距仪9、驱动电机5和图像识别机构7连接,通过无线通信设备与盾构工业电脑通信相连,盾构工业电脑通过数据指令控制机构6驱动盾构管片采料系统。
盾构管片采料系统整体呈对称结构,包括两条平行设置的行走轨道梁2,行走轨道梁2两端分别通过法兰盘与盾构机固定,钢框架3呈U型结构,U型结构两竖部分别与两根行走轨道梁2连接,驱动电机5带动设于钢框架3上的驱动轴10,继而带动行走轮4沿行走轨道梁2下翼缘板行走,驱动电机5为具有正反转功能的小型电机,驱动电机5外置变频控制器,变频控制器通过有线形式接收数据指令控制机构6发出的信号并执行该信号进而控制驱动电机5运转,变频控制器通过无线形式接收盾构机工业电脑发出的信号并执行该信号进而控制驱动电机5运转,且盾构机工业电脑发出的信号优先级高于数据指令控制机构6发出的信号。
激光测距仪9通过吊杆11与U型结构两竖部底面固定,激光测距仪9的水平中垂线穿过所述激光靶靶心。
基于自动巡航的隧道内管片智能吊运系统的工作方法,其特征在于,包括以下步骤:
步骤一,数据输入:盾构管片采料系统整体开机,盾构工业电脑将盾构机三维坐标信息、无人自动驾驶电瓶车三维坐标信息、管片二维码信息、激光靶三维坐标信息、盾构管片1安装顺序、隧道信息输入数据指令控制机构6,所述数据指令控制机构6根据激光测距仪9测得与激光靶的间距确定盾构管片采料系统处于盾构机中的位置,机械臂处于折叠收缩状态;
步骤二,盾构管片采料系统首次确认待安装盾构管片信息:无人自动驾驶电瓶车将管片运输到位,并向盾构工业电脑反馈管片材料已运输到位及自身三维坐标信息,盾构工业电脑接收信息后反馈至数据指令控制机构6,数据指令控制机构6根据无人自动驾驶电瓶车三维坐标信息,分析盾构管片采料系统与无人自动驾驶电瓶车间距,指令驱动电机5工作至无人自动驾驶电瓶车附近,图像识别机构7开始扫描并识别无人自动驾驶上的盾构管片1形状信息并将信息反馈至分析盾构管片采料系统;
步骤三,再次确认带安装盾构管片信息:数据指令控制机构6根据图像识别机构7识别的形状信息确定该盾构管片1为待安装盾构管片后,继续指令驱动电机5带动盾构管片采料系统的运行至待安装盾构管片处,计算机械臂操作台81中心位置与管片中心位置间距,数据指令控制机构6根据所计算间距,向液压泵站发出信号,液压泵站13收到信号后,根据信号指令控制液压千斤顶12移动,进而带动与滑块14连接的机械臂操作台81微调,使吊运机构8处于盾构管片1中心部位正上方,图像识别机构7扫描盾构管片1上二维码信息,再次与数据指令控制机构6内存储的待安装盾构管片信息对比至一致,数据指令控制机构6通过指令机械臂操作台81使竖向可调机械臂82工作,真空吸盘吊具83触碰到管片中心部位,向数据指令控制机构6反馈真空吸盘吊具83已就位,数据指令控制机构6向控制蓄能器的变频控制器发出信号,真空吸盘吊具83吸取该待安装盾构管片;
步骤四,吊运至盾构机喂片机:数据指令控制机构6根据激光测距仪9测得与激光靶的间距,确定盾构管片采料系统与盾构机喂片机间距,并指令盾构管片采料系统运动至盾构机喂片机后,数据指令控制机构向控制蓄能器的变频器发出信号,真空吸盘吊具83下放待安装盾构管片,机械臂折叠收缩,重复上述步骤,数据指令控制机构6根据内存的盾构管片1安装顺序信息,指令盾构管片采料系统顺次完成对标准块、临接块和封顶块的转运后,等待下一环隧道管片的隧道内吊运工作。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 基于自动巡航的隧道内管片智能吊运系统及其工作方法
- 基于自动巡航的隧道内管片智能吊运系统及其工作方法