输电线路隐患目标识别方法及计算机可读存储介质
文献发布时间:2023-06-19 19:23:34
技术领域
本发明涉及目标检测技术领域,尤其涉及一种输电线路隐患目标识别方法及计算机可读存储介质。
背景技术
在输电场景中,常常会在输电导线附近出现施工器械或者其他目标,对输电线路的安全产生一定的隐患。因此如何识别出输电场景下的隐患目标具有重大的意义,可以大大提高输电线路的安全保障。
在公开号为CN107609556A的中国专利文件中提出了一种输电线路环境中高空作业机械的检测方法,它首先对图像进行相关预处理,然后利用边缘检测获得其边缘图像,再根据边缘图像分割出图像中的天空区域;在检测时,利用边缘图像进行差分,得到候选检测区域,利用背景模型去除候选区域中假的隐患区域,再利用颜色信息和边缘曲率信息去除不符合规定特征的目标,最终剩余候选区域中的目标将被视为高空作业机械,进行报警。
该方法主要通过边缘检测识别出天际线以上的作业机械,但是边缘检测效果较低,同时该方法检测不到天际线以下的能够威胁到输电线路的目标;再者也不支持例如山火、烟雾等高风险目标的检测;此外没有结合输电线路分析目标是否会对输电线路的安全做成威胁,存在较高的误识别率。
发明内容
本发明所要解决的技术问题是:提供一种输电线路隐患目标识别方法及计算机可读存储介质,可提高隐患目标的识别准确率。
为了解决上述技术问题,本发明采用的技术方案为:一种输电线路隐患目标识别方法,包括:
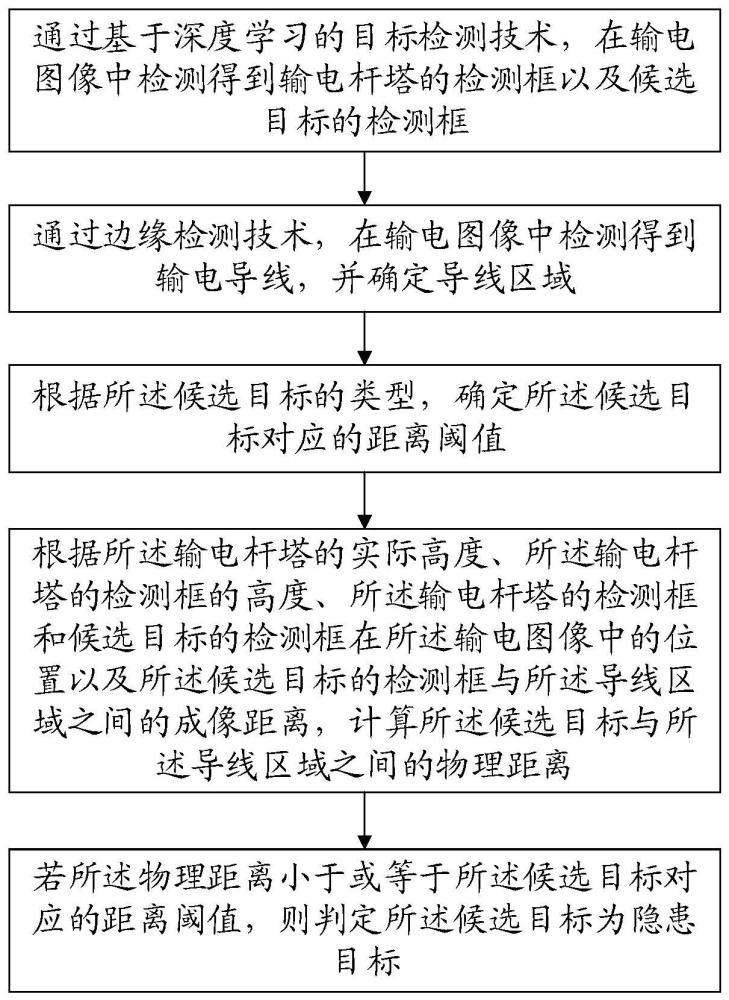
通过基于深度学习的目标检测技术,在输电图像中检测得到输电杆塔的检测框以及候选目标的检测框;
通过边缘检测技术,在输电图像中检测得到输电导线,并确定导线区域;
根据所述候选目标的类型,确定所述候选目标对应的距离阈值;
根据所述输电杆塔的实际高度、所述输电杆塔的检测框的高度、所述输电杆塔的检测框和候选目标的检测框在所述输电图像中的位置以及所述候选目标的检测框与所述导线区域之间的成像距离,计算所述候选目标与所述导线区域之间的物理距离;
若所述物理距离小于或等于所述候选目标对应的距离阈值,则判定所述候选目标为隐患目标。
本发明还提出一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如上所述的方法。
本发明的有益效果在于:通过使用基于深度学习的目标检测算法,可高完整性、高准确性地识别出输电线路场景中的候选目标;通过确定导线区域,并根据候选目标与导线区域之间的实际物理距离来判断候选目标是否为隐患目标,可以准确地分辨出候选目标是否对输电导线构成威胁,减少漏报、误报的情况,可有效提高隐患目标的识别准确率。
附图说明
图1为本发明的一种输电线路隐患目标识别方法的流程图;
图2为本发明实施例一的方法流程图;
图3为本发明实施例一的输电图像示意图;
图4为本发明实施例一的摄像机成像原理示意图。
具体实施方式
为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图详予说明。
请参阅图1,一种输电线路隐患目标识别方法,包括:
通过基于深度学习的目标检测技术,在输电图像中检测得到输电杆塔的检测框以及候选目标的检测框;
通过边缘检测技术,在输电图像中检测得到输电导线,并确定导线区域;
根据所述候选目标的类型,确定所述候选目标对应的距离阈值;
根据所述输电杆塔的实际高度、所述输电杆塔的检测框的高度、所述输电杆塔的检测框和候选目标的检测框在所述输电图像中的位置以及所述候选目标的检测框与所述导线区域之间的成像距离,计算所述候选目标与所述导线区域之间的物理距离;
若所述物理距离小于或等于所述候选目标对应的距离阈值,则判定所述候选目标为隐患目标。
从上述描述可知,本发明的有益效果在于:可提高隐患目标的识别准确率。
进一步地,所述通过边缘检测技术,在输电图像中检测得到输电导线,并确定导线区域,具体为:
通过快速直线检测算法,在输电图像中检测得到输电导线中的边际导线,所述边际导线包括左侧边际导线和右侧边际导线;
分别将所述左侧边际导线和右侧边际导线映射至水平地面上,得到左侧映射线和右侧映射线;
根据所述左侧映射线和右侧映射线以及所述输电杆塔的检测框的底部线段和所述输电图像的底部线段,确定导线区域。
由上述描述可知,通过确定导线区域,可以有效、准确分辨出候选目标是否对输电导线构成威胁。
进一步地,所述根据所述候选目标的类型,确定所述候选目标对应的距离阈值,具体为:
根据所述候选目标的类型,确定候选目标的风险等级;
根据候选目标的风险等级,确定候选目标对应的距离阈值。
由上述描述可知,通过对目标进行风险等级分级,并根据风险等级设定距离阈值,可以提高对高风险目标的识别灵敏度。
进一步地,所述根据所述输电杆塔的实际高度、所述输电杆塔的检测框的高度、所述输电杆塔的检测框和候选目标的检测框在所述输电图像中的位置以及所述候选目标的检测框与所述导线区域之间的成像距离,计算所述候选目标与所述导线区域之间的物理距离,具体为:
根据所述输电杆塔的检测框的高度,确定所述输电杆塔的成像高度;
获取所述输电杆塔的实际高度,并根据所述输电杆塔的成像高度和实际高度,计算所述输电杆塔的检测框的底部线段对应的缩放比例,作为第一缩放比例;
根据所述输电图像的高度以及所述输电杆塔的检测框的底部线段在输电图像中的位置,计算所述输电图像的中心高度与所述输电杆塔的检测框的底部线段之间的成像距离,作为第一成像距离;
根据所述输电图像的高度以及所述候选目标的检测框的底部线段在输电图像中的位置,计算所述输电图像的中心高度与所述候选目标的检测框的底部线段之间的成像距离,作为第二成像距离;
根据所述第一缩放比例、第一成像距离和第二成像距离,计算所述候选目标的检测框的底部线段对应的缩放比例,作为第二缩放比例;
根据所述候选目标的检测框底部线段在输电图像中的位置以及所述导线区域在输电图像中的位置,计算所述候选目标的检测框的底部线段与所述导线区域在水平方向上的成像距离,作为第三成像距离;
根据所述第三成像距离和第二缩放比例,计算所述候选目标与所述导线区域之间的物理距离。
由上述描述可知,根据摄像机成像原理,分析计算得到候选目标与导线区域之间的实际物理距离。
进一步地,所述获取所述输电杆塔的实际高度,并根据所述输电杆塔的成像高度和实际高度,计算所述输电杆塔的检测框的底部线段对应的缩放比例,作为第一缩放比例,具体为:
将所述输电杆塔的实际高度除以所述输电杆塔的成像高度,得到所述输电杆塔的检测框的底部线段对应的缩放比例,作为第一缩放比例。
进一步地,所述根据所述第一缩放比例、第一成像距离和第二成像距离,计算所述候选目标的检测框的底部线段对应的缩放比例,作为第二缩放比例,具体为:
将所述第一缩放比例乘以所述第一成像距离后除以第二成像距离,得到候选目标的检测框的底部线段对应的缩放比例,作为第二缩放比例。
进一步地,所述根据所述第三成像距离和第二缩放比例,计算所述候选目标与所述导线区域之间的物理距离,具体为:
将所述第三成像距离乘以所述第二缩放比例,得到所述候选目标与所述导线区域之间的物理距离。
进一步地,所述判定所述候选目标为隐患目标之后,进一步包括:
根据所述候选目标对应的告警策略进行告警。
由上述描述可知,提高输电线路的安全保障。
进一步地,所述候选目标包括但不限于施工器械、山火和烟雾,所述施工器械包括但不限于塔吊、铲车、推土机、挖掘机、翻斗车、吊车、水泥泵车、船吊、桩机和长臂挖机。
由上述描述可知,可支持多种施工器械的检测,支持山火、烟雾的检测,支持拓展目标种类,提高目标识别的全面性。
本发明还提出一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如上所述的方法。
实施例一
请参照图2-4,本发明的实施例一为:一种输电线路隐患目标识别方法,可应用于输电场景。如图2所示,包括如下步骤:
S1:通过基于深度学习的目标检测技术,在输电图像中检测得到输电场景中的输电杆塔的检测框以及候选目标的检测框。
如图3所示,图3中的T0即输电杆塔的检测框,T1即候选目标的检测框。
本实施例中,目标检测技术包括但不限于Yolo、RCNN、SSD等目标检测算法。候选目标包括但不限于施工器械、山火和烟雾,施工器械包括但不限于塔吊、铲车、推土机、挖掘机、翻斗车、吊车、水泥泵车、船吊、桩机和长臂挖机。
S2:通过边缘检测技术,在输电图像中检测得到输电导线,并确定导线区域。
具体地,通过Opencv的快速直线检测算法(FastLineDetector),在输电图像中检测得到输电导线中的边际导线,所述边际导线包括左侧边际导线和右侧边际导线;然后分别将所述左侧边际导线和右侧边际导线映射至水平地面上,得到左侧映射线和右侧映射线;最后根据所述左侧映射线和右侧映射线以及所述输电杆塔的检测框的底部线段和所述输电图像的底部线段,确定导线区域。
如图3所示,图3中的L1为左侧边际导线,并延长与输电杆塔的检测框T0相交;L2为右侧边际导线,并延长与输电杆塔的检测框T0相交;L1’为左侧边际导线在水平地面上的映射线段,即左侧映射线,映射依据为L1的左上起点映射到输电图像的底部,L1的右下终点映射到输电杆塔的检测框T0的底部;L2’为右侧边际导线在水平地面上的映射线段,即右侧映射线,映射依据为L2的右上起点映射到输电图像的底部,L2的左下终点映射到输电杆塔的检测框T0的底部;O为L1’的延长线和L2’的延长线的交点。
另外,图3中的a为输电杆塔的检测框T0的左下角点,b为输电杆塔的检测框T0的右下角点,线段ab即输电杆塔的检测框T0的底部线段。
导线区域即L1’、线段ab、L2’和输电图像的底部所围成的区域。
S3:根据候选目标的类型,确定候选目标对应的距离阈值。
本实施例中,先根据候选目标的类型,确定候选目标的风险等级,再根据候选目标的风险等级,确定候选目标对应的距离阈值。
其中,候选目标的风险等级依据危险等级进行分级,可分为低风险和高风险,具体划分如下:
低风险目标:塔吊、铲车、推土机、挖掘机、翻斗车;
高风险目标:吊车、水泥泵车、船吊、桩机、长臂挖机、山火、烟雾。
本实施例中,高风险目标的距离阈值为60米,低风险目标的距离阈值为30米。
S4:计算所述候选目标与导线区域之间的物理距离。
如图4所示,假设目标位于位置P
同理,当目标位于任一位置P时,图像中的A’位置的缩放比例k=AO/A’O
由于A
如果目标的实际高度已知,且目标的成像高度可通过图像获得,那么也就可以计算出P
结合图3-4,图3中的c为候选目标的检测框的右下角点,e和f分别为候选目标的检测框的底部线段的延长线与左侧映射线L1’和右侧映射线L2’的交点,d为oc连线与输电杆塔的检测框T0的底部线段的延长线的交点。因此,线段ce即表示候选目标的检测框的底部线段与导线区域在水平方向上的成像距离。
假设杆塔的实际高度为H
假设成像图像(即输电图像)的高度为h,线段ab在图像中的纵坐标为y
A
A’O
因此,线段ce处的缩放比例k=k
根据成像图像可计算出线段ce在图像中的长度L,那么线段ce的实际距离S=L*k=L*k
因此,本步骤具体包括如下步骤:
S401:根据输电杆塔的检测框的高度,确定输电杆塔的成像高度。
S402:获取输电杆塔的实际高度,并根据输电杆塔的成像高度和实际高度,计算输电杆塔的检测框的底部线段对应的缩放比例,作为第一缩放比例。
例如,假设输电杆塔的成像高度为374pix(像素),输电杆塔的实际高度为50m(米),则第一缩放比例k
S403:根据输电图像的高度以及输电杆塔的检测框的底部线段在输电图像中的位置,计算输电图像的中心高度与输电杆塔的检测框的底部线段之间的成像距离,作为第一成像距离。
S404:根据输电图像的高度以及候选目标的检测框的底部线段在输电图像中的位置,计算输电图像的中心高度与候选目标的检测框的底部线段之间的成像距离,作为第二成像距离。
S405:根据所述第一缩放比例、第一成像距离和第二成像距离,计算候选目标的检测框的底部线段对应的缩放比例,作为第二缩放比例。
例如,假设输电图像的高度为1743pix,那么输电图像的中心高度为871pix。假设输电杆塔的检测框的底部线段(图3中的线段ab)与输电图像的中心高度之间的成像距离(即第一成像距离,也即图4中的A
S406:根据候选目标的检测框底部线段在输电图像中的位置以及所述导线区域在输电图像中的位置,计算所述候选目标的检测框的底部线段与所述导线区域在水平方向上的成像距离,作为第三成像距离。
S407:根据所述第三成像距离和第二缩放比例,计算候选目标与导线区域之间的物理距离。
例如,假设第三成像距离(即获取图3中的线段ce的长度)为274pix,则候选目标与导线区域之间的物理距离S=0.093*274=25.5m。
S5:判断所述物理距离是否小于或等于候选目标对应的距离阈值,若是,则执行步骤S6。
S6:判定所述候选目标为隐患目标。
当候选目标出现在导线区域附近还未触及导线区域时,就对输电线路造成了威胁,因此,当候选目标与导线区域的物理距离小于对应的距离阈值时,就认为该候选目标为隐患目标。
例如,图3中检测得到的候选目标为烟雾,烟雾为高风险目标,其对应的距离阈值为60米,而烟雾的检测框与导线区域的物理距离为25.5米,小于距离阈值60米,因此认为图3中的烟雾为隐患目标。
进一步地,还可以根据隐患目标的风险等级以及与导线区域的物理距离来制定不同的告警策略。
例如,当隐患目标为低风险目标时,若隐患目标距离导线区域60米以上,则进行提示告警;若距离导线区域40-60米,则进行三级告警;若距离导线区域20-40米,则进行二级告警;若距离导线区域20米以内,则进行一级告警;若隐患目标位于导线区域内,则进行紧急告警。
当隐患目标为高风险目标时,若隐患目标距离导线区域80米以上,则进行提示告警;若距离导线区域60-80米,则进行三级告警;若距离导线区域40-60米,则进行二级告警;若距离导线区域40米以内,则进行一级告警;若隐患目标位于导线区域内,则进行紧急告警。
本实施例中,通过使用基于深度学习的目标检测算法,可以有效地提高目标检测的准确率,且可支持多种施工器械的检测,支持山火、烟雾的检测,支持拓展目标种类,提高目标识别的全面性;通过确定导线区域,可以有效、准确分辨出候选目标是否对输电导线构成威胁;通过对目标进行风险等级分级,并根据风险等级设定距离阈值,可以提高对高风险目标的识别灵敏度;通过根据候选目标检测框与导线区域之间的实际物理距离来判断候选目标是否为隐患目标,可以有效地减少漏报、误报,有效提高隐患识别的准确性。
实施例二
本实施例是对应上述实施例的一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如上述实施例中一种输电线路隐患目标识别方法的各个步骤,且能达到相同的技术效果,此处不再累述。
综上所述,本发明提供的一种输电线路隐患目标识别方法及计算机可读存储介质,通过使用基于深度学习的目标检测算法,可以有效地提高目标检测的准确率,且可支持多种施工器械的检测,支持山火、烟雾的检测,支持拓展目标种类,提高目标识别的全面性;通过确定导线区域,可以有效、准确分辨出候选目标是否对输电导线构成威胁;通过对目标进行风险等级分级,并根据风险等级设定距离阈值,可以提高对高风险目标的识别灵敏度;通过根据候选目标检测框与导线区域之间的实际物理距离来判断候选目标是否为隐患目标,可以有效地减少漏报、误报,有效提高隐患识别的准确性。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。