一种无人机目标检测定位装置及方法
文献发布时间:2023-06-19 19:32:07
技术领域
本发明涉及无人机导航定位技术领域,具体为一种无人机目标检测定位装置及方法。
背景技术
由于无人机不用考虑飞行员的存在,因此在结构设计上就具有非常大的灵活性,在满足空气动力学的基础上有着丰富多样的结构,同时其体积相对较小,易于采用各类隐身措施提高防雷达、防红外、防目视能力,当前无人机普遍采用卫星定位系统进行导航控制。
但是,传统的无人机导航存在以下缺点:
传统的无人机在导航过程中,可能会由于天气、高原、密集建筑物等复杂空间或遭到恶意干扰等原因丢失卫星信号,导致无人机无法精准的安装定位路线飞行。
发明内容
本发明的目的在于提供一种无人机目标检测定位装置及方法,以解决上述背景技术中提出的传统的无人机在导航过程中,可能会由于天气、高原、密集建筑物等复杂空间或遭到恶意干扰等原因丢失卫星信号,导致无人机无法精准的安装定位路线飞行的问题。
为实现上述目的,本发明提供如下技术方案:一种无人机目标检测定位装置,包括无人机壳,所述无人机壳的顶端固定安装有若干个飞行机构,若干个所述飞行机构均包括支撑杆和微型电机壳,所述支撑杆的顶端转动连接有角度杆,所述角度杆的顶端与微型电机壳的底端固定连接,所述无人机壳两侧的底端均固定安装有自锁伸缩杆,两个所述自锁伸缩杆的活动端均转动安装有角度座,两个所述角度座的底端均固定安装有安装板,两个所述安装板的底端均固定安装有支撑垫,所述无人机壳的底端固定安装有图像采取机构,所述图像采取机构包括电机壳本体和方向轴,所述电机壳本体的内部固定安装有旋转电机,所述旋转电机的输出端穿过电机壳本体与方向轴正对的一端固定连接,所述无人机壳的内部固定安装有场景分析模块、采集处理模块、导航定位模块和控制模块,角度气缸进行伸缩运动,角度气缸从一侧推动角度杆,使得角度杆沿着支撑杆发生角度偏转,以此对螺旋桨转动的方向进行调整,间接对无人机的飞行方向进行调整。
作为本发明的一种优选技术方案,所述微型电机壳的内部固定安装有微型电机,所述微型电机的输出端穿过微型电机壳固定安装有螺旋桨,所述支撑杆的中部转动连接有角度气缸,所述角度气缸的活动端与角度杆的中部转动连接,若干个所述支撑杆的底端均与无人机壳固定连接,微型电机通电后启动,微型电机带动螺旋桨转动,螺旋桨转动后带动无人机壳飞行。
作为本发明的一种优选技术方案,所述方向轴的一侧固定安装有可见光视觉传感器,所述方向轴的另一侧固定安装有红外视觉传感器,所述电机壳本体的顶端与无人机壳固定连接,旋转电机通电后启动,旋转电机带动方向轴转动,方向轴转动的过程中对可见光视觉传感器的采集方向和红外视觉传感器的采集方向进行调整,红外视觉传感器通过红外线对图像采集,可见光视觉传感器通过可见光线对图像采集。
作为本发明的一种优选技术方案,所述场景分析模块包括图像获取单元、种类提取单元、特征提取单元、数据存储单元和扩充样本库单元,场景分析模块分析场景中可能存在目标的种类,目标特征,建立场景仿真库模型,生成并扩充样本库,建立可训练的样本集。
作为本发明的一种优选技术方案,所述采集处理模块包括图像角度处理单元、图像尺度处理单元、图像像素处理单元和图像目标锁定单元,采集处理模块对视觉传感器采集的图像进行角度处理、尺度处理、像素处理并对动态目标进行锁定。
作为本发明的一种优选技术方案,所述导航定位模块包括地图存储单元、地形信息单元、无人机高度估算单元、无人机经度估算单元、无人机纬度估算单元和无人机飞行状态单元,导航定位模块结合高精度离线地图、地形信息,估算此时无人机飞行的高度位置、经度位置和纬度位置,并对无人机的飞行状态进行了解,保证无人机完成自主导航任务。
本发明一种无人机目标检测定位装置的使用方法,包括以下步骤:
步骤一、飞行机构启动:微型电机带动螺旋桨转动,带动无人机壳飞行;
步骤二、图像采取机构启动:可见光视觉传感器和红外视觉传感器通过可见光和红外线对无人机周围的图像进行获取;
步骤三、图像处理:采集处理模块对采集的图像进行角度、尺度、像素和目标进行锁定处理;
步骤四、图像分析:场景分析模块分析场景中可能存在目标的种类、目标特征,建立场景仿真库模型,生成并扩充样本库,建立可训练的样本集;
步骤五、无人机定位:导航定位模块结合高精度离线地图、地形信息,估算无人机当前飞行位置和状态,完成自主导航任务。
与现有技术相比,本发明的有益效果是:
1、通过设置飞行机构,微型电机带动螺旋桨转动,以此带动无人机壳飞行,角度气缸从一侧推动角度杆,使得角度杆沿着支撑杆发生角度偏转,对螺旋桨的转动方向进行调整,间接的对无人机的飞行方向进行调整;
2、通过设置导航定位模块,导航定位模块结合高精度离线地图、地形信息,估算无人机当前飞行位置和状态,完成自主导航任务;
3、通过设置场景分析模块,场景分析模块分析场景中可能存在目标的种类,目标特征,建立场景仿真库模型,生成并扩充样本库,建立可训练的样本集;
4、通过设置图像采取机构,红外视觉传感器通过红外线对图像采集,可见光视觉传感器通过可见光线对图像采集,便于无人机对周围环境进行感知。
附图说明
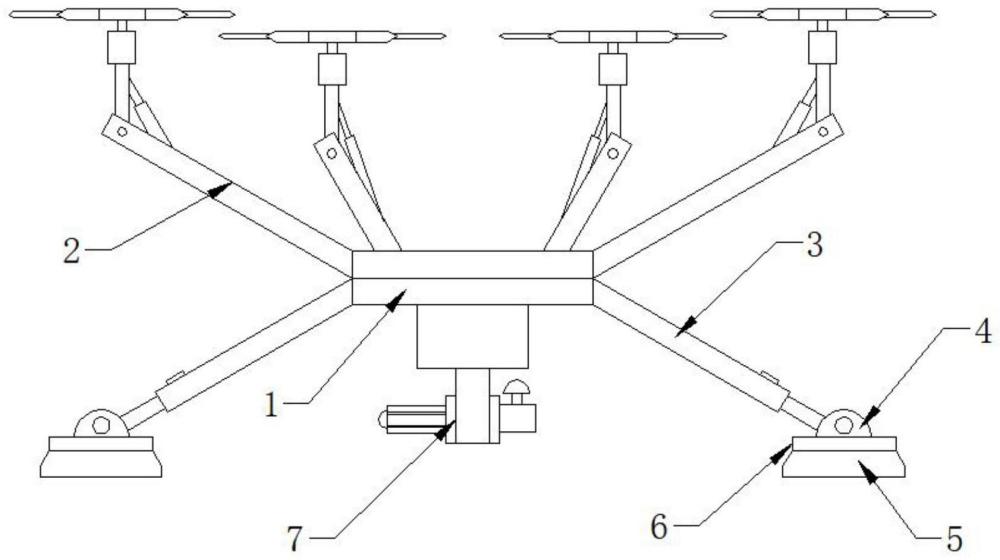
图1为本发明的侧视图;
图2为本发明的结构示意图;
图3为本发明飞行机构的结构示意图;
图4为本发明无人机壳的结构示意图;
图5为本发明场景分析模块的结构示意图;
图6为本发明采集处理模块的结构示意图;
图7为本发明导航定位模块的结构示意图;
图8为本发明的流程图。
图中:1、无人机壳;2、飞行机构;21、支撑杆;22、角度杆;23、微型电机壳;24、螺旋桨;25、微型电机;26、角度气缸;3、自锁伸缩杆;4、角度座;5、支撑垫;6、安装板;7、图像采取机构;71、方向轴;72、可见光视觉传感器;73、红外视觉传感器;74、电机壳本体;75、旋转电机;8、场景分析模块;81、图像获取单元;82、种类提取单元;83、特征提取单元;84、数据存储单元;85、扩充样本库单元;9、采集处理模块;91、图像角度处理单元;92、图像尺度处理单元;93、图像像素处理单元;94、图像目标锁定单元;10、导航定位模块;101、地图存储单元;102、地形信息单元;103、无人机高度估算单元;104、无人机经度估算单元;105、无人机纬度估算单元;106、无人机飞行状态单元;11、控制模块。
具体实施方式
下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-8,本发明提供了一种无人机目标检测定位装置,包括无人机壳1,无人机壳1的顶端固定安装有若干个飞行机构2,若干个飞行机构2均包括支撑杆21和微型电机壳23,支撑杆21的顶端转动连接有角度杆22,角度杆22的顶端与微型电机壳23的底端固定连接,无人机壳1两侧的底端均固定安装有自锁伸缩杆3,两个自锁伸缩杆3的活动端均转动安装有角度座4,两个角度座4的底端均固定安装有安装板6,两个安装板6的底端均固定安装有支撑垫5,无人机壳1的底端固定安装有图像采取机构7,图像采取机构7包括电机壳本体74和方向轴71,电机壳本体74的内部固定安装有旋转电机75,旋转电机75的输出端穿过电机壳本体74与方向轴71正对的一端固定连接,无人机壳1的内部固定安装有场景分析模块8、采集处理模块9、导航定位模块10和控制模块11,角度气缸26进行伸缩运动,角度气缸26从一侧推动角度杆22,使得角度杆22沿着支撑杆21发生角度偏转,以此对螺旋桨24转动的方向进行调整,间接对无人机的飞行方向进行调整。
微型电机壳23的内部固定安装有微型电机25,微型电机25的输出端穿过微型电机壳23固定安装有螺旋桨24,支撑杆21的中部转动连接有角度气缸26,角度气缸26的活动端与角度杆22的中部转动连接,若干个支撑杆21的底端均与无人机壳1固定连接,微型电机25通电后启动,微型电机25带动螺旋桨24转动,螺旋桨24转动后带动无人机壳1飞行。
方向轴71的一侧固定安装有可见光视觉传感器72,方向轴71的另一侧固定安装有红外视觉传感器73,电机壳本体74的顶端与无人机壳1固定连接,旋转电机75通电后启动,旋转电机75带动方向轴71转动,方向轴71转动的过程中对可见光视觉传感器72的采集方向和红外视觉传感器73的采集方向进行调整,红外视觉传感器73通过红外线对图像采集,可见光视觉传感器72通过可见光线对图像采集。
场景分析模块8包括图像获取单元81、种类提取单元82、特征提取单元83、数据存储单元84和扩充样本库单元85,场景分析模块8分析场景中可能存在目标的种类,目标特征,建立场景仿真库模型,生成并扩充样本库,建立可训练的样本集。
采集处理模块9包括图像角度处理单元91、图像尺度处理单元92、图像像素处理单元93和图像目标锁定单元94,采集处理模块9对视觉传感器采集的图像进行角度处理、尺度处理、像素处理并对动态目标进行锁定。
导航定位模块10包括地图存储单元101、地形信息单元102、无人机高度估算单元103、无人机经度估算单元104、无人机纬度估算单元105和无人机飞行状态单元106,导航定位模块10结合高精度离线地图、地形信息,估算此时无人机飞行的高度位置、经度位置和纬度位置,并对无人机的飞行状态进行了解,保证无人机完成自主导航任务。
本发明一种无人机目标检测定位装置的使用方法,包括以下步骤:
步骤一、飞行机构2启动:微型电机25带动螺旋桨24转动,带动无人机壳1飞行;
步骤二、图像采取机构7启动:可见光视觉传感器72和红外视觉传感器73通过可见光和红外线对无人机周围的图像进行获取;
步骤三、图像处理:采集处理模块9对采集的图像进行角度、尺度、像素和目标进行锁定处理;
步骤四、图像分析:场景分析模块8分析场景中可能存在目标的种类、目标特征,建立场景仿真库模型,生成并扩充样本库,建立可训练的样本集;
步骤五、无人机定位:导航定位模块10结合高精度离线地图、地形信息,估算无人机当前飞行位置和状态,完成自主导航任务。
本发明在使用时:微型电机25通电后启动,微型电机25带动螺旋桨24转动,螺旋桨24转动后带动无人机壳1飞行,角度气缸26进行伸缩运动,角度气缸26从一侧推动角度杆22,使得角度杆22沿着支撑杆21发生角度偏转,以此对螺旋桨24转动的方向进行调整,间接对无人机的飞行方向进行调整,旋转电机75通电后启动,旋转电机75带动方向轴71转动,方向轴71转动的过程中对可见光视觉传感器72的采集方向和红外视觉传感器73的采集方向进行调整,红外视觉传感器73通过红外线对图像采集,可见光视觉传感器72通过可见光线对图像采集,采集处理模块9对采集的图像进行角度、尺度、像素和目标进行锁定处理,场景分析模块8分析场景中可能存在目标的种类、目标特征,建立场景仿真库模型,生成并扩充样本库,建立可训练的样本集,导航定位模块10结合高精度离线地图、地形信息,估算无人机当前飞行位置和状态,完成自主导航任务。
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。