一种基于基站的水下机器人长期驻留控制系统及方法
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及水下装备领域,特别涉及一种基于基站的水下机器人长期驻留控制系统及方法。
背景技术
水下机器人作为探索海洋的重要平台之一,在海洋科考、海洋资源勘查、海洋测绘、水下目标探查、海上搜救等领域发挥着越来越重要的作用。
受制于水下机器人可携带能源的限制,水下机器人在进行深海作业时,需要频繁浮出水面,在作业母船或水面支持平台的支持下完成能源补充和数据交换。这不仅要消耗大量的时间,而且作业的连续性也会被打断。在水下基站的支持下,可直接通过基站实现水下机器人的能源补充和数据交换,也可根据作业需求对水下机器人进行静默休眠或者唤醒启动,是实现水下机器人长时间连续作业的有效方式。因此,有必要研制基于基站的水下机器人长期驻留控制系统及相关控制方法。
发明内容
针对现有技术的不足,本发明的目的在于提供一种基于基站的水下机器人长期驻留控制系统及方法,该控制系统及方法适用于水下机器人长时间连续作业。
本发明为实现上述目的所采用的技术方案是:一种基于基站的水下机器人长期驻留控制系统,包括水下机器人端和基站端;
所述水下机器人端包括顺次连接的主控单元、休眠静默与唤醒开关、二次电池组能源、无线充电单元受电端、水下光通信单元A端,所述主控单元与水下光通信单元A端、水下机器人其他节点设备连接,无线充电单元受电端与休眠静默与唤醒开关连接;
所述基站端包括顺次连接的无线充电单元送电端、基站能源、基站控制单元、水下光通信单元B端,所述基站控制单元与无线充电单元送电端连接;所述无线充电单元送电端用于对无线充电单元受电端进行无线能源传输,所述水下光通信单元B端用于与水下光通信单元A端通信。
所述无线充电单元受电端与无线充电单元送电端配对使用,用于基站能源到水下机器人端二次电池组能源的无线补给。
所述水下光通信单元A端与水下光通信单元B端配对使用,用于基站端和水下机器人端之间的信息和数据双向无线传输.
所述休眠静默与唤醒开关为磁保持开关,用于通过外部控制信号实现此开关的接通与关断动作,并保持此开关的当前通断状态。
所述水下机器人端的二次电池组能源,用于经过休眠静默与唤醒开关给主控单元供电;
所述主控单元,用于控制水下光通信单元A端和水下机器人其他节点设备工作,以及控制休眠静默与唤醒开关断开;
所述无线充电单元受电端,用于给二次电池组能源充电,控制水下光通信单元A端工作,以及控制休眠静默与唤醒开关接通。
所述基站能源,用于给基站控制单元和无线充电单元送电端供电;
所述基站控制单元,用于控制无线充电单元送电端和水下光通信单元B端工作。
水下机器人长期驻留控制方法,包括能源补给控制方法,步骤如下:
基站控制单元定期对无线充电单元的送电端发出启动控制信号,向水下光通信单元B端发送能源补给控制命令;
无线充电单元的受电端将感应到的能源经过内部稳压变换给水下光通信单元A端的供电,使其工作;
水下光通信单元A端接收到水下光通信单元B端发出的能源补给控制命令后,转发给无线充电单元的受电端;
无线充电单元的受电端根据接收到的能源补给控制命令,启动内部充电电路给二次电池组能源充电;充电采用先恒流后恒压的方式,在充电过程中,无线充电单元的受电端实时检测充电电流,当实际充电电流小于设定的阈值时,自动停止充电输出,并通过水下光通信单元A端发送完成充电状态,告知基站水下机器人已经完成充电动作;
基站控制单元收到完成充电状态后对无线充电单元的送电端发出关闭控制信号,同时停止向水下光通信单元B端发送命令,即结束充电动作。
水下机器人长期驻留控制方法,还包括所述休眠静默控制方法,步骤如下:
水下机器人进入基站,水下机器人端的主控单元通过水下光通信单元A端和水下光通信单元B端向基站传输作业数据,完成作业数据传输后告知基站水下机器人进入待关机状态;完成握手确认后,主控单元发出断开控制信号使休眠静默与唤醒开关断开,水下机器人关机休眠。
水下机器人长期驻留控制方法,还包括唤醒启动控制方法,步骤如下:
基站需要水下机器人唤醒启动时,基站控制单元对无线充电单元的送电端发出启动控制信号,向水下光通信单元B端发送唤醒启动控制命令;
无线充电单元的受电端将感应到的能源经过内部稳压变换给水下光通信单元A端的供电,使其工作;
水下光通信单元A端接收到水下光通信单元B端发出的唤醒启动控制命令后,转发给无线充电单元的受电端;
无线充电单元的受电端根据接收到的唤醒启动控制命令,启动内部唤醒电路,给休眠静默与唤醒开关发出接通信号,使水下机器人的主控单元启动;
主控单元完成启动动作后,通过水下光通信单元A端发送完成唤醒启动状态,告知基站水下机器人已经完成充电动作;
基站控制单元收到完成唤醒启动状态后对无线充电单元的送电端发出关闭控制信号,同时停止向水下光通信单元B端发送命令,即结束唤醒启动动作。
本发明具有以下有益效果及优点:
1.本发明适用于水下工作环境,可通过基站实现水下机器人的能源补充和数据交换,是实现水下机器人长时间连续作业的有效方式。
2.本发明可根据作业需求对水下机器人进行静默休眠或者唤醒启动,使水下机器人的作业更加灵活。
附图说明
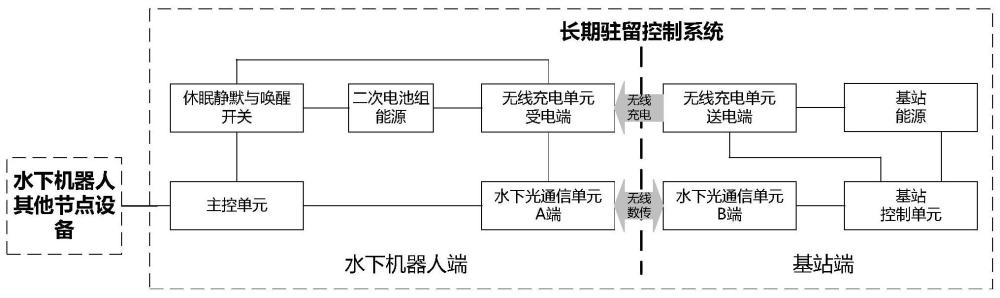
图1是本发明基于基站的水下机器人长期驻留控制系统的结构示意图;
图2是本发明基于基站的水下机器人长期驻留控制系统的功能示意图;
图3是本发明休眠静默控制方法的流程图;
图4是本发明能源补给控制方法的流程图;
图5是本发明唤醒启动控制方法的流程图。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
如图1所示,本发明提供的一种基于基站的水下机器人长期驻留控制系统,包括水下机器人端和基站端;
水下机器人端包括主控单元、休眠静默与唤醒开关、二次电池组能源、无线充电单元受电端、水下光通信单元A端。其中主控单元、休眠静默与唤醒开关、二次电池组能源、无线充电单元受电端、水下光通信单元A端依次连接,主控单元与水下机器人其他节点设备连接,无线充电单元受电端与休眠静默与唤醒开关连接;
基站端包括基站控制单元、基站能源、无线充电单元送电端、水下光通信单元B端。其中基站控制单元分别与基站能源、无线充电单元送电端、水下光通信单元B端连接,基站能源与无线充电单元送电端连接。
如图2所示,本发明提供的一种基于基站的水下机器人长期驻留控制系统,无线充电单元受电端由受电线圈、受电控制电路、唤醒电路、充电电路、稳压电路组成,无线充电单元送电端由送电线圈和送电控制电路组成。送电线圈可将基站能源通过电磁感应的形式向受电线圈传递能量;受电控制电路可通过稳压电路给水下光通信单元A端供电时使其工作,并获取水下光通信单元A端发出的控制命令,同时将受电线圈感应得到的能量传递给唤醒电路、充电电路、稳压电路,并根据水下光通信单元A端的控制命令对三者分别控制;稳压电路可提供水下光通信单元A端供电所需电源;唤醒电路可控制休眠静默与唤醒开关接通;充电电路可实现二次电池组能源的充电功能;送电控制电路可根据基站控制单元的命令控制送电线圈工作。无线充电单元受电端与无线充电单元送电端配对使用,用于基站能源到水下机器人能源的无线传输。
水下光通信单元A端与水下光通信单元B端配对使用,用于基站和水下机器人之间的信息和数据双向无线传输。
休眠静默与唤醒开关为磁保持开关,可通过外部控制信号实现此开关的接通与关断动作,并能够保持此开关的当前通断状态。
水下机器人端的二次电池组能源经过休眠静默与唤醒开关给主控单元供电;主控单元可进一步控制水下光通信单元A端和水下机器人其他节点设备工作,也可控制休眠静默与唤醒开关断开;无线充电单元受电端可给二次电池组能源充电,控制水下光通信单元A端工作,也可控制休眠静默与唤醒开关接通。
基站端的基站能源给基站控制单元和无线充电单元送电端供电;基站控制单元可控制无线充电单元送电端和水下光通信单元B端工作。
如图3、图4、图5所示,本发明提供的一种基于基站的水下机器人长期驻留控制方法,具体包括休眠静默控制方法、能源补给控制方法和唤醒启动控制方法。
如图3所示,休眠静默控制方法具体流程为:
水下机器人进入基站,水下机器人的主控单元通过水下光通信单元A端和水下光通信单元B端向基站传输作业数据,完成作业数据传输后告知基站水下机器人进入待关机状态;完成“握手”确认后,主控单元发出断开控制信号使休眠静默与唤醒开关断开,水下机器人全系统关机休眠;
如图4所示,能源补给控制方法具体流程为:
基站控制单元定期对无线充电单元的送电端发出启动控制信号,向水下光通信单元B端发送能源补给控制命令,无线充电单元的受电端将感应到的能源经过内部稳压变换给水下光通信单元A端的供电,使其工作;水下光通信单元A端接收到水下光通信单元B端发出的能源补给控制命令后,转发给无线充电单元的受电端,无线充电单元的受电端根据接收到的能源补给控制命令,启动内部充电电路给二次电池组能源充电;充电采用先恒流后恒压的方式,在充电过程中,无线充电单元的受电端实时检测充电电流,当实际充电电流小于设定的阈值时,自动停止充电输出,并通过水下光通信单元A端发送完成充电状态,告知基站水下机器人已经完成充电动作;基站控制单元收到完成充电状态后对无线充电单元的送电端发出关闭控制信号,同时停止向水下光通信单元B端发送命令,即结束充电动作。
如图5所示,唤醒启动控制方法具体流程为:
基站需要水下机器人唤醒启动时,基站控制单元对无线充电单元的送电端发出启动控制信号,向水下光通信单元B端发送唤醒启动控制命令,无线充电单元的受电端将感应到的能源经过内部稳压变换给水下光通信单元A端的供电,使其工作;水下光通信单元A端接收到水下光通信单元B端发出的唤醒启动控制命令后,转发给无线充电单元的受电端,无线充电单元的受电端根据接收到的唤醒启动控制命令,启动内部唤醒电路,给休眠静默与唤醒开关发出接通信号,此时休眠静默与唤醒开关使其接通,使水下机器人的主控单元启动。完成启动动作后,并通过水下光通信单元A端发送完成唤醒启动状态,告知基站水下机器人已经完成充电动作;基站控制单元收到完成唤醒启动状态后对无线充电单元的送电端发出关闭控制信号,同时停止向水下光通信单元B端发送命令,即结束唤醒启动动作。
本发明适用于水下工作环境,可通过基站实现水下机器人的能源补充和数据交换,是实现水下机器人长时间连续作业的有效方式;同时,可根据作业需求对水下机器人进行静默休眠或者唤醒启动,使水下机器人的作业更加灵活。
以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。