一种仿精子推进水下机器人
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及水下机器人领域,尤其涉及一种仿精子推进水下机器人。
背景技术
水下推进机器人近几年的研究蓬勃发展,但是大部分的水下推进机器人是研究仿鱼类的鱼鳍拍动推进和螺旋桨推进。这些推进方式在低粘度液体中,具有很高的推进效率和速度,但是在高黏度液体中的推进速度和推进效率并不高。螺旋推进方式在高粘度液体中的综合推进效果好。精子的螺旋运动方式就为高性能仿生螺旋推进水下航行器的研制应用提供了新的途径和技术手段。
粘液是自然界中广泛存在的液体,并且很多的化工产品和原料也是低雷诺数的高粘度液体。检查和成像输送高粘性流体的管道等工作需求较大,所以螺旋推进运动的机器人在粘液中的推进优势,使之成为工业应用当中广泛研究的设备。
发明内容
本发明提供一种仿精子推进水下机器人,用以解决现有现有的尾鳍摆动的仿生推进机构在高黏度液体中推进效率较低的问题。
本发明实施例提供一种仿精子推进水下机器人,包括:
头部模块,包括:第一舵机和第二舵机;
传动模块和尾部模块,所述尾部模块包括:尾部机构、主动摆动机构;所述主动摆动机构包括:第一连杆、第二连杆和节点控制板;所述节点控制板的一部位通过所述第一连杆和所述传动模块与所述第一舵机传动连接,所述节点控制板的另一部位通过所述第二连杆和所述传动模块与所述第二舵机传动连接,所述尾部机构连接在所述节点控制板上。
根据本发明提供的一种仿精子推进水下机器人,所述尾部模块还包括:被动摆动机构;
所述被动摆动机构包括:被动摆动杆、第一万向节和第二万向节;
所述被动摆动杆的一端通过所述第一万向节与所述头部模块连接,所述被动摆动杆的另一端通过所述第二万向节与所述节点控制板连接。
根据本发明提供的一种仿精子推进水下机器人,所述被动摆动机构设有两个,分别为第一被动摆动机构和第二被动摆动机构,所述第一被动摆动机构与所述第一连杆相对设置,所述第二被动摆动机构与所述第二连杆相对设置。
根据本发明提供的一种仿精子推进水下机器人,所述第一连杆和所述第二连杆的长度均与所述被动摆动杆的长度相等。
根据本发明提供的一种仿精子推进水下机器人,所述头部模块还包括:第一舵盘、第二舵盘、舵机安装板、外壳底座、第一输出轴和第二输出轴;
所述第一舵盘与所述第一舵机连接,所述第二舵盘与所述第二舵机连接,所述第一舵机和所述第二舵机均通过所述舵机安装板固定在所述外壳底座上,所述第一输出轴的一端穿过所述外壳底座通过所述第一舵盘与所述第一舵机传动连接,所述第一输出轴的另一端通过所述第一连杆与所述节点控制板传动连接,所述第二输出轴的一端穿过所述外壳底座通过所述第二舵盘与所述第二舵机传动连接,所述第二输出轴的另一端通过所述第二连杆与所述节点控制板传动连接。
根据本发明提供的一种仿精子推进水下机器人,所述头部模块还包括:尾部固定件;
所述尾部固定件设置在所述外壳底座上,所述尾部固定件上设有第一安装孔,所述节点控制板上设有第二安装孔,所述第二安装孔的孔径大于所述尾部机构的直径,所述尾部机构的一端穿过所述第二安装孔设置在所述第一安装孔中。
根据本发明提供的一种仿精子推进水下机器人,所述第一舵机为x轴舵机,沿第一方向进行传动;所述第二舵机为y轴舵机,沿与第一方向垂直的第二方向进行传动。
根据本发明提供的一种仿精子推进水下机器人,所述传动模块包括:第一主动齿轮、第一被动齿轮、第一摆动轴和第一固定件;
所述第一被动齿轮通过所述第一主动齿轮与所述第一舵机传动连接,所述第一被动齿轮与所述第一摆动轴连接,所述第一摆动轴通过所述第一固定件可转动地设置在所述头部模块上,所述第一摆动轴与所述第一连杆连接。
根据本发明提供的一种仿精子推进水下机器人,所述传动模块还包括:第二主动齿轮、第二被动齿轮、第二摆动轴和第二固定件;
所述第二被动齿轮通过所述第二主动齿轮与所述第二舵机传动连接,所述第二被动齿轮与所述第二摆动轴连接,所述第二摆动轴通过所述第二固定件可转动地设置在所述头部模块上,所述第二摆动轴与所述第二连杆连接。
根据本发明提供的一种仿精子推进水下机器人,所述尾部机构为硅胶制成圆柱形的柔性尾巴。
本发明提供的仿精子推进水下机器人,设有头部模块、传动模块和尾部模块,通过节点控制板的一部位通过第一连杆和传动模块与第一舵机传动连接,节点控制板的另一部位通过第二连杆和传动模块与第二舵机传动连接,尾部机构连接在节点控制板上,使得该尾部模块可将第一舵机和第二舵机的角度反应到节点控制板,进而可以控制尾部机构的轨迹,从而该仿精子推进水下机器人不仅可以在水中运动,甚至在粘液中的运动效率更高。此外,该仿精子推进水下机器人通过传动实现尾部机构的运动,提高了运动效率和灵活性,实现了更为逼真的仿生效果。
附图说明
为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
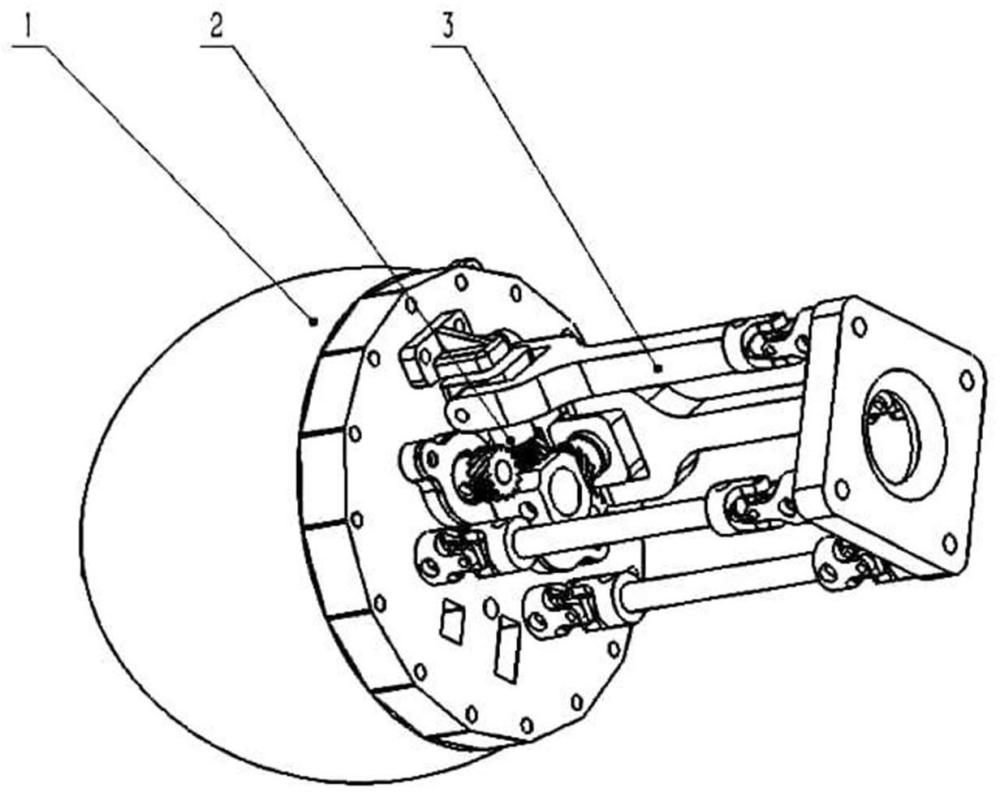
图1是本发明一种实施例的仿精子推进水下机器人整体结构示意图;
图2是本发明一种实施例的仿精子推进水下机器人头部模块的结构示意图;
图3是本发明一种实施例的仿精子推进水下机器人传动模块的结构示意图;
图4是本发明一种实施例的仿精子推进水下机器人尾部模块的结构示意图;
附图标记:
1、头部模块;2、传动模块;3、尾部模块;4、第二舵盘;5、第二舵机;6、第一舵机;7、第一舵盘;8、舵机安装板;9、外壳底座;10、第一输出轴;11、尾部固定件;12、第二输出轴;13、第一主动齿轮;14、第一被动齿轮;15、第一摆动轴;16、第一固定件;17、第二固定件;18、第二摆动轴;19、第二被动齿轮;20、第二主动齿轮;21、第一万向节;22、第一被动摆动杆;23、第二万向节;24、第一连杆;25、第三万向节;26、第四万向节;27、第二连杆;28、节点控制板;29、第二被动摆动杆。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
在本发明实施例的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明实施例中的具体含义。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明实施例的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
下面结合图1、图2、图3和图4描述本发明实施例提供的仿精子推进水下机器人,该仿精子推进水下机器人包括:头部模块1、传动模块2和尾部模块3。传动模块2和尾部模块3依次设置在头部模块1的尾部。
本实施例中,头部模块1前端外形呈流线型,降低推进时的水阻力。头部模块1包括:第一舵机6和第二舵机5。第一舵机6和第二舵机5可以根据需要调整对应的转动角度。
其中,尾部模块3连接在头部模块1的尾部,尾部模块3包括:尾部机构和主动摆动机构。主动摆动机构包括:第一连杆24、第二连杆27和节点控制板28。节点控制板28的一部位通过第一连杆24和传动模块2与第一舵机6传动连接,节点控制板28的另一部位通过第二连杆27和传动模块2与第二舵机5传动连接,尾部机构连接在节点控制板28上。由此,节点控制板28同时可通过第一舵机6和第二舵机5驱动,由于尾部机构连接在节点控制板28上,在节点控制板28摆动时,可控制控制尾部机构的轨迹。
本发明提供的仿精子推进水下机器人工作时,头部模块1中的第一舵机6和第二舵机5根据命令调整对应的转动角度。传动模块2在第一舵机6和第二舵机5转动的过程中,传动模块2将第一舵机6的输出角度通过第一连杆24传递至节点控制板28,于此同时传动模块2将第二舵机5的输出角度通过第二连杆27传递至节点控制板28。也即,在第一连杆24、第二连杆27摆动时,节点控制板28随之摆动,可以根据不同第一舵机6和第二舵机5角度得到不同的节点轨迹。从而控制与节点控制板28连接的尾部机构的轨迹。由于该机器人为仿精子推进水下机器人,不仅可以在水中运动,甚至在粘液中的运动效率更高。仿精子推进水下机器人运动灵活、效率高、可靠性强、使用寿命长、具有较强的实用性。
本发明提供的仿精子推进水下机器人,设有头部模块、传动模块和尾部模块,通过节点控制板的一部位通过第一连杆和传动模块与第一舵机传动连接,节点控制板的另一部位通过第二连杆和传动模块与第二舵机传动连接,尾部机构连接在节点控制板上,使得该尾部模块可将第一舵机和第二舵机的角度反应到节点控制板,进而可以控制尾部机构的轨迹,从而该仿精子推进水下机器人不仅可以在水中运动,甚至在粘液中的运动效率更高。此外,该仿精子推进水下机器人通过传动实现尾部机构的运动,提高了运动效率和灵活性,实现了更为逼真的仿生效果。
需要说明的是,为了更好地控制节点控制板28的摆动,第一连杆24的顶部设有第三万向节25,第二连杆27的顶部设有第四万向节26。也即,第一连杆24通过第三万向节25与节点控制板28连接,第二连杆27通过第四万向节26与节点控制板28连接。
在一个实施例中,如图1至图4所示,尾部模块3还包括:被动摆动机构。被动摆动机构包括:被动摆动杆、第一万向节21和第二万向节23。
其中,被动摆动杆的一端通过第一万向节21与头部模块1连接,被动摆动杆的另一端通过第二万向节23与节点控制板28连接。本实施例通过被动摆动机构配合主动摆动机构共同控制节点控制板28的摆动。
进一步地,被动摆动机构设有两个,分别为第一被动摆动机构和第二被动摆动机构。第一被动摆动机构和第二被动摆动机构均包括:被动摆动杆、第一万向节21和第二万向节23。
其中,第一被动摆动机构的第一被动摆动杆22的一端通过第一万向节21与头部模块1连接,第一被动摆动机构的第一被动摆动杆22的另一端通过第二万向节23与节点控制板28连接。第二被动摆动机构的第二被动摆动杆29的一端通过第一万向节21与头部模块1连接,第二被动摆动机构的第二被动摆动杆29的另一端通过第二万向节23与节点控制板28连接。本实施例通过第一被动摆动机构和第二被动摆动机构配合主动摆动机构共同控制节点控制板28的摆动。第一被动摆动机构、第二被动摆动机构和主动摆动机构互相解耦,且互相正交,在输出角度允许的范围内可以实现任意轨迹的尾部摆动运动。
本实施例中,如图4所示,第一连杆24和第二连杆27的长度均与被动摆动杆的长度相等,被动摆动杆设有两个,也即第一连杆24、第二连杆27、第一被动摆动杆22和第二被动摆动杆29的长度均相等。第一被动摆动杆22与第一连杆24相对,第二被动摆动杆29与第二连杆27相对。
优选地,第一连杆24、第二连杆27、第一被动摆动杆22和第二被动摆动杆29相互平行且长度均相等,长度等于外壳底座9和节点控制板28之间的距离。由此可组成两个平行四边形,有效实现舵机角度的等比传递。既保证了节点控制板28与外壳底座9平行又保证了可以准确的将x轴和y轴的角度输出到尾部机构上。
在一个示例中,如图1和图2所示,头部模块1包括:第一舵盘7、第二舵盘4、舵机安装板8、外壳底座9、第一输出轴10和第二输出轴12。
其中,第一舵盘7与第一舵机6连接,第二舵盘4与第二舵机5连接,也即第一舵机6用于驱动第一舵盘7转动,第二舵机5用于驱动第二舵盘4转动。第一舵机6和第二舵机5均通过舵机安装板8固定在外壳底座9上,第一输出轴10的一端穿过外壳底座9通过第一舵盘7与第一舵机6传动连接,第一输出轴10的另一端通过第一连杆24与节点控制板28传动连接,第二输出轴12的一端穿过外壳底座9通过第二舵盘4与第二舵机5传动连接,第二输出轴12的另一端通过第二连杆27与节点控制板28传动连接。
本实施例中,第一舵机6为x轴舵机,第一舵机6沿第一方向进行传动。第二舵机5为y轴舵机,第二舵机5沿与第一方向垂直的第二方向进行传动。x轴舵机与第一舵盘7连接,x轴舵机通过舵机安装板8固定在外壳底座9上。第一舵盘7与第一输出轴10连接。从而将x轴舵机的输出角度输出到传动模块2上。y轴舵机与第二舵盘4连接,y轴舵机通过舵机安装板8固定在外壳底座9上。第二舵盘4与第二输出轴12连接。从而将y轴舵机的输出角度输出到传动模块2上。
此外,头部模块1中静密封与动密封均采用O型圈密封。
在一个示例中,如图1至图4所示,头部模块1还包括:尾部固定件11;尾部固定件11设置在外壳底座9上,尾部固定件11上设有第一安装孔,节点控制板28上设有第二安装孔,第二安装孔的孔径大于尾部机构的直径,从而尾部机构的一端穿过第二安装孔设置在第一安装孔中。
本实施例中,尾部机构为硅胶制成圆柱形的柔性尾巴。柔性尾巴穿过节点控制板28的第二安装孔,同时柔性尾巴与尾部固定件11连接。柔性尾巴会与节点控制板28有一定接触,柔性尾巴一直被限制在节点控制板28的第二安装孔,从而在第一舵机6和第二舵机5摆动时,节点控制板28随之摆动,进而控制节点控制板28中心的第二安装孔使柔性尾巴也随之运动。
基于上述实施例,在一个实施例中,如图1至图4所示,传动模块2包括:第一主动齿轮13、第一被动齿轮14、第一摆动轴15和第一固定件16。
其中,第一被动齿轮14通过第一主动齿轮13与第一舵机6传动连接。第一摆动轴15为实心轴。第一被动齿轮14与第一摆动轴15连接,第一摆动轴15通过第一固定件16可转动地设置在头部模块1上,第一摆动轴15与第一连杆24连接。
该传动模块2在工作过程中,第一舵机6转动后,可带动第一主动齿轮13转动,从而第一被动齿轮14在第一主动齿轮13的驱动下转动,同时第一摆动轴15带动第一连杆24转动。节点控制板28随之摆动,可以根据第一舵机6的转动角度得到不同的节点轨迹。从而控制与节点控制板28连接的尾部机构的轨迹。
具体而言,第一主动齿轮13和第一被动齿轮14均为斜齿轮。第一主动齿轮13通过机米螺丝与第一输出轴10连接。第一被动齿轮14中心孔穿过第一摆动轴15并通过机米螺丝与之固定。第一摆动轴15两端凸台分别穿过第一固定件16和尾部固定件11上的轴承,从而使之可以固定并使第一主动齿轮13和第一被动齿轮14紧密啮合。通过第一主动齿轮13和第一被动齿轮14将舵机输出轴方向进行变换,将绕垂直方向的旋转转化为绕水平方向的旋转。
基于上述实施例,在一个实施例中,如图1至图4所示,传动模块2还包括:第二主动齿轮20、第二被动齿轮19、第二摆动轴18和第二固定件17。
其中,第二被动齿轮19通过第二主动齿轮20与第二舵机5传动连接。第二摆动轴18为实心轴。第二被动齿轮19与第二摆动轴18连接,第二摆动轴18通过第二固定件17可转动地设置在头部模块1上,第二摆动轴18与第二连杆27连接。
该传动模块2在工作过程中,第二舵机5转动后,可带动第二主动齿轮20转动,从而第二被动齿轮19在第二被动齿轮19的驱动下转动,同时第二摆动轴18带动第二连杆27转动。节点控制板28随之摆动,可以根据第二舵机5的转动角度得到不同的节点轨迹。从而控制与节点控制板28连接的尾部机构的轨迹。
具体而言,第二主动齿轮20和第二被动齿轮19均为斜齿轮。第二主动齿轮20通过机米螺丝与第二输出轴12连接。第二被动齿轮19中心孔穿过第二摆动轴18并通过机米螺丝与之固定。第二摆动轴18两端凸台分别穿过第二固定件17和尾部固定件11上的轴承,从而使之可以固定并使第二主动齿轮20和第二被动齿轮19紧密啮合。通过第二主动齿轮20和第二被动齿轮19将舵机输出轴方向进行变换,将绕垂直方向的旋转转化为绕水平方向的旋转。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。