车辆无钥匙进入与启动方法、装置及存储介质
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及车辆识别方法技术领域,尤其涉及一种基于人脸识别的车辆无钥匙进入与启动方法、装置及存储介质。
背景技术
随着汽车技术的不断发展和保有量的不断增多,人们对于汽车智能化程序的需求也在不断提高。用户在购买汽车时,除了对汽车驾驶和乘坐舒适性需求外,汽车是否配有智能化设备也是考虑的重点之一。
无钥匙进入系统已经成为现代汽车的常见配置,一定程度上为车主提供了便利性,也带来了一定的安全性问题。现有大多数的车辆无钥匙进入系统主要是利用车钥匙与车辆之间的双重射频系统匹配,仍然需要车主携带车钥匙,只能省略掏出车钥匙进行解锁的动作。而这种车辆无钥匙进入系统一般也只对车钥匙的合法性进行验证,而不具有对车主身份进行识别验证的功能。当车钥匙丢失时,若被别人捡到,别人一样可以解锁进入车内。而在实际生活中,难免会存在忘记携带车钥匙或者车钥匙丢失或者不便于携带车钥匙而又需要进入车辆并启动车辆的场景。因此,现有的车辆无钥匙进入系统的弊端便显现出来。
为此,本申请人经过有益的探索和研究,找到了解决上述问题的方法,下面将要介绍的技术方案便是在这种背景下产生的。
发明内容
本发明所要解决的技术问题之一在于:针对现有技术的不足而提供一种提高车辆解锁和启动的便利性与安全性的基于人脸识别的车辆无钥匙进入与启动方法。
本发明所要解决的技术问题之二在于:提供一种实现上述车辆无钥匙进入与启动方法的装置。
本发明所要解决的技术问题之三在于:提供一种实现上述车辆无钥匙进入与启动方法的存储介质。
作为本发明第一方面的一种车辆无钥匙进入与启动方法,包括:
获取靠近车门人员的第一深度图像信息,并对所述第一深度图像信息进行人脸检测处理;
根据人脸检测处理结果对所述第一深度图像信息进行活体检测处理,并根据所述活体检测处理结果对所述第一深度图像信息进行身份验证处理;
根据身份验证处理结果控制车门是否解锁;
当车门解锁后,获取车辆驾驶座人员的第二深度图像信息,并对所述第二深度图像信息进行人脸识别验证处理;以及
根据人脸识别验证处理结果控制车辆是否启动。
在本发明的一个优选实施例中,所述获取靠近车门人员的第一深度图像信息,包括:
当车辆处于停车锁门状态时,通过安装在车门处的第一TOF相机以待机采集帧率采集车门外的深度图像信息;
对采集到的深度图像信息进行检测处理,以判断是否有人员靠近车门;以及
若检测到有人员靠近车门,则将所述第一TOF相机以工作采集帧率对靠近车门人员进行图像采集处理,以获取靠近车门人员的第一深度图像信息。
在本发明的一个优选实施例中,所述第一深度图像信息包括深度图像和近红外图像。
在本发明的一个优选实施例中,所述对所述第一深度图像信息进行人脸检测处理,包括:
获取所述第一深度图像信息中的近红外图像,并对所述近红外图像送入人脸检测模块进行人脸检测处理;以及
根据人脸检测处理结果判断所述近红外图像中是否存在人脸,若检测到人脸,则进行活体检测处理和身份验证处理,若未检测到人脸,则继续通过所述第一TOF相机以工作采集帧率对靠近车门人员进行图像采集并再次进行人脸检测处理,若检测到人员离开,则将所述第一TOF相机的采集帧率调整为待机采集帧率。
在本发明的一个优选实施例中,所述根据人脸检测处理结果对所述第一深度图像信息进行活体检测处理,包括:
若人脸检测处理结果为检测到人脸,则分别对所述第一深度图像信息中的深度图像和近红外图像进行图像调整处理;
对经过图像调整处理后的深度图像进行梯度图像处理,得到所述深度图像的水平方向、垂直方向以及中心到边缘方向的梯度图像,并将三张梯度图像合并为三通道深度图像;
将经过图像调整处理后的深度图像和近红外图像进行合并处理,得到三通道灰度图像;
将所述三通道深度图像送入基于深度图像的活体检测模型计算深度图像模型得分;
若所述深度图像模型得分高于第一活体阈值,则将所述三通道灰度图像送入基于近红外图像的活体检测模型计算灰度图像模型得分;
若所述灰度图像模型得分高于第二活体阈值,则所述三通道深度图像、三通道灰度图像对应地放入深度图像缓存队列、灰度图像缓存队列内;
重复计算模型得分直至所述深度图像缓存队列和灰度图像缓存队列的队列长度等于预设值,分别从所述深度图像缓存队列、灰度图像缓存队列中取出的三通道深度图像、三通道灰度图像,并分别清空所述深度图像缓存队列、灰度图像缓存队列;
分别计算取出的三通道深度图像、三通道灰度图像的LBP-TOP特征,并将计算得到的三通道深度图像、三通道灰度图像的LBP-TOP特征拼接后放入基于综合特征的时序活体检测模型内计算时序模型得分;以及
若所述时序模型得分大于第三活体阈值,则认定为活体。
在本发明的一个优选实施例中,所述分别对所述第一深度图像信息中的深度图像和近红外图像进行图像调整处理,包括:
分别对所述深度图像和近红外图像进行矫畸调整处理;
分别对经过矫畸调整处理的深度图像和近红外图像进行滤波处理;
分别对经过滤波处理的深度图像和近红外图像进行动态压缩处理;以及
分别对经过动态压缩处理的深度图像和近红外图像进行灰度值归一化处理。
在本发明的一个优选实施例中,所述根据所述活体检测处理结果对所述第一深度图像信息进行身份验证处理,包括:
若所述活体检测处理结果认定为活体,则获取所述第一深度图像信息中的近红外图像;以及
将所述近红外图像与本地授权解锁车辆的身份库进行比对处理,若比对通过,则解锁车门。
在本发明的一个优选实施例中,所述获取车辆驾驶座人员的第二深度图像信息,并对所述第二深度图像信息进行人脸识别验证处理,包括:
当车门解锁后,通过安装在车辆驾驶位处的第二TOF相机以待机采集帧率采集车辆驾驶位外的深度图像信息;
对采集到的深度图像信息进行检测处理,以判断是否有人员坐在车辆驾驶座上;
若检测到有人员坐在车辆驾驶座上,则将所述第二TOF相机以工作采集帧率对车辆驾驶座人员进行图像采集处理,以获取车辆驾驶座人员的第二深度图像信息;
将所述第二深度图像信息中的近红外图像送入人脸检测模块进行人脸检测处理;以及
根据人脸检测处理结果判断是否存在人脸,若检测到人脸,则将所述近红外图像与本地授权启动车辆的身份库进行比对处理,若比对通过,则授权启动车辆。
作为本发明第二方面的一种车辆无钥匙进入与启动装置,包括:
第一TOF相机,所述第一TOF相机安装在车门处,用于采集靠近车门人员的第一深度图像信息;
第二TOF相机,所述第二TOF相机安装在车辆驾驶位处,用于采集车辆驾驶位人员的第二深度图像信息;
第一深度图像信息处理模块,所述第一深度图像信息处理模块用于获取靠近车门人员的第一深度图像信息,并对所述第一深度图像信息进行人脸检测处理;
活体检测与身份验证模块,所述活体检测与身份验证模块用于根据人脸检测处理结果对所述第一深度图像信息进行活体检测处理,并根据所述活体检测处理结果对所述第一深度图像信息进行身份验证处理;
车门锁控制模块,所述车门锁控制模块用于根据身份验证处理结果控制车门是否解锁;
第二深度图像信息处理模块,所述第二深度图像信息处理模块用于当车门解锁后,获取车辆驾驶座人员的第二深度图像信息,并对所述第二深度图像信息进行人脸识别验证处理;以及
车辆启动控制模块,所述车辆启动控制模块用于根据人脸识别验证处理结果控制车辆是否启动。
作为本发明第三发明的一种实现上述车辆无钥匙进入与启动方法的存储介质,其上存储有程序,所述程序被处理器执行时实现以下步骤:
获取靠近车门人员的第一深度图像信息,并对所述第一深度图像信息进行人脸检测处理;
根据人脸检测处理结果对所述第一深度图像信息进行活体检测处理,并根据所述活体检测处理结果对所述第一深度图像信息进行身份验证处理;
根据身份验证处理结果控制车门是否解锁;
当车门解锁后,获取车辆驾驶座人员的第二深度图像信息,并对所述第二深度图像信息进行人脸识别验证处理;以及
根据人脸识别验证处理结果控制车辆是否启动。
由于采用了如上技术方案,本发明的有益效果在于:
1.本发明采集用户的生物信息,对用户的生物特征进行验证并授权用户对车辆的操作权限,从而实现无钥匙进入并启动汽车。
2.相比较传统的采用单目或者双目传感器采集人脸进行活体检测,本发明基于TOF传感技术通过单帧即可拿到深度图和IR图,计算量小、实时性高;同时本发明采用主动光源,受环境光的干扰较小可在复杂的环境光条件下使用,且对硬件要求较低,稳定可靠。
3.相比现在普遍采取的无钥匙进入系统方案,本发明无需用户携带实体钥匙,智能化程度更高,且可有效地防止钥匙丢失或者未携带钥匙时无法进入车辆以及钥匙被盗窃时的财产损失。
4.相比较基于指纹和其他触摸式感应技术的无钥匙进入系统方案,本发明具有活体鉴别和人脸ID双重验证,安全性更高,且无需用户配合和等待。
5.相比较云端身份验证的无钥匙进入系统方案,本发明提供本地离线的身份信息库,可离线设置信息库,所有计算均在本地完成,无需上传云端,确保用户隐私安全性,实时性更好。
6.相比较传统的无钥匙进入系统,本发明基于人脸ID的方式,所需硬件较少、功耗低、成本低,系统复杂性不高,随之带来的是更低的故障率,可以给用户带来更好的体验。
7.相比较传统的车辆启动逻辑,本发明提出了新的车辆启动授权验证逻辑,未被授权的人员即便解锁车辆也无法启动车辆发动机,可以有效地避免儿童以及其他人员误启动车辆,进一步地提高了安全性能。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
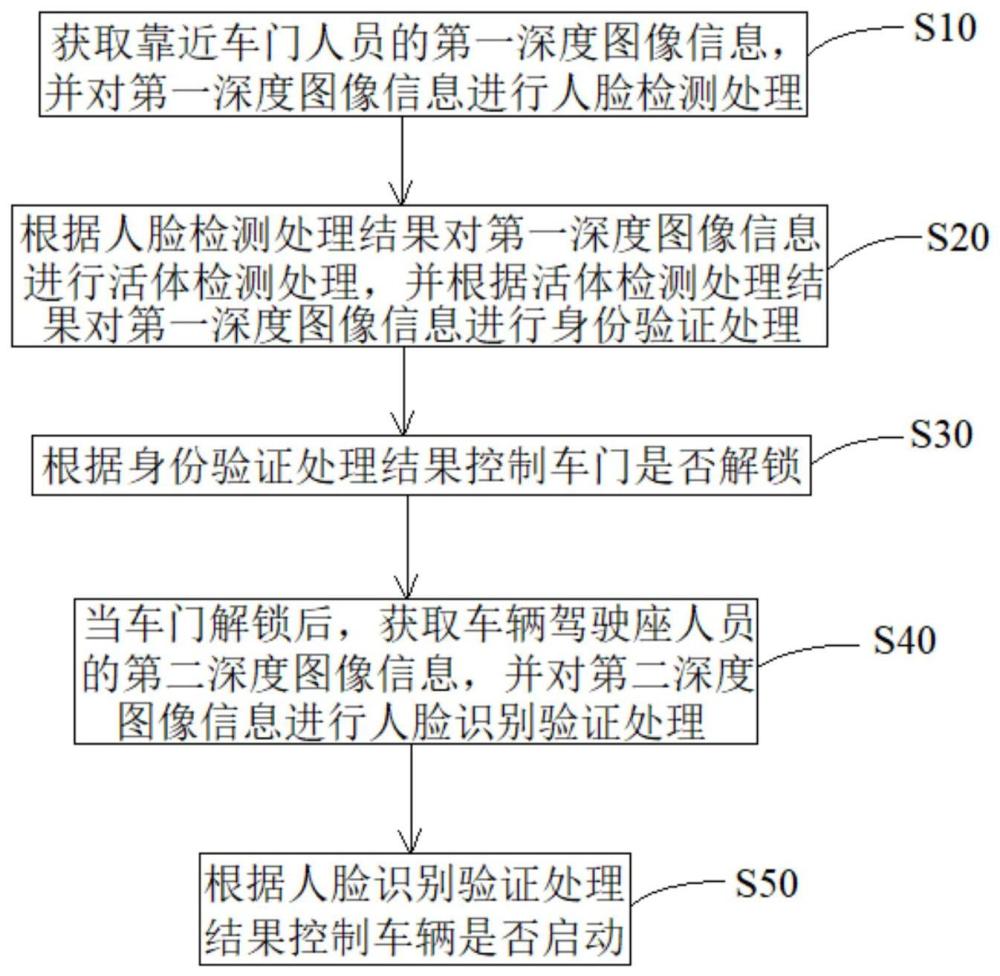
图1是本发明的车辆无钥匙进入与启动方法的流程图。
图2是本发明的车辆无钥匙进入与启动方法的一种应用实施例的流程图。
图3是本发明的车辆无钥匙进入与启动方法中活体检测的一种应用实施例的流程图。
图4是本发明的车辆无钥匙进入与启动装置的结构示意图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明。
参见图1,图中给出的是一种车辆无钥匙进入与启动方法,包括以下步骤:
步骤S10,获取靠近车门人员的第一深度图像信息,并对第一深度图像信息进行人脸检测处理;
步骤S20,根据人脸检测处理结果对第一深度图像信息进行活体检测处理,并根据活体检测处理结果对第一深度图像信息进行身份验证处理;
步骤S30,根据身份验证处理结果控制车门是否解锁;
步骤S40,当车门解锁后,获取车辆驾驶座人员的第二深度图像信息,并对第二深度图像信息进行人脸识别验证处理;
步骤S50,根据人脸识别验证处理结果控制车辆是否启动。
参见图1并结合图2,在步骤S10中,获取靠近车门人员的第一深度图像信息,包括以下步骤:
步骤S11,当车辆处于停车锁门状态时,通过安装在车门处的第一TOF相机(图2中所示的图像采集单元)以待机采集帧率采集车门外的深度图像信息。其中,待机采集帧率可根据采集需要进行适应性的调整;
步骤S12,对采集到的深度图像信息进行检测处理,以判断是否有人员靠近车门;
步骤S13,若检测到有人员靠近车门,则将第一TOF相机以工作采集帧率对靠近车门人员进行图像采集处理,以获取靠近车门人员的第一深度图像信息,其中,第一深度图像信息包括深度图像和近红外图像。其中,工作采集帧率可根据采集需要进行适应性的调整。近红外图像的成像原理为第一TOF相机采用主动发射波长为850nm或940nm的光,根据反射光的光强处理成近红外图像。
参见图1并结合图2,在步骤S10中,对第一深度图像信息进行人脸检测处理,包括以下步骤:
步骤S14,获取第一深度图像信息中的近红外图像,并对近红外图像送入人脸检测模块进行人脸检测处理;
步骤S15,根据人脸检测处理结果判断近红外图像中是否存在人脸,若检测到人脸,则进入步骤S20进行活体检测处理和身份验证处理,若未检测到人脸,则进入步骤S16;
步骤S16,返回步骤S13,继续通过第一TOF相机以工作采集帧率对靠近车门人员进行图像采集并再次进行人脸检测处理,若检测到人员离开,则将第一TOF相机的采集帧率调整为待机采集帧率。
参见图3并结合图1和图2,在步骤S20中,根据人脸检测处理结果对第一深度图像信息进行活体检测处理,包括以下步骤:
步骤S211,若人脸检测处理结果为检测到人脸,则分别对第一深度图像信息中的深度图像和近红外图像进行图像调整处理;
步骤S212,对经过图像调整处理后的深度图像进行梯度图像处理,得到深度图像的水平方向、垂直方向以及中心到边缘方向的梯度图像,并将三张梯度图像合并为三通道深度图像D_IMG;
步骤S213,将经过图像调整处理后的深度图像和近红外图像进行合并处理,得到三通道灰度图像I_IMG;
步骤S214,将三通道深度图像D_IMG送入基于深度图像的活体检测模型D_MODEL计算深度图像模型得分;
步骤S215,若深度图像模型得分高于第一活体阈值S_D,第一活体阈值S_D根据模型需求而预先设置,则将三通道灰度图像I_IMG送入基于近红外图像的活体检测模型I_MODEL计算灰度图像模型得分;
步骤S216,若灰度图像模型得分高于第二活体阈值S_I,第二活体阈值S_I根据模型需求而预先设置,则三通道深度图像D_IMG、三通道灰度图像I_IMG对应地放入深度图像缓存队列Q_D、灰度图像缓存队列Q_I内;
步骤S217,重复计算模型得分(重复执行步骤S24至步骤S26)直至深度图像缓存队列Q_D和灰度图像缓存队列Q_I的队列长度等于预设值,在本实施例中,预设值为3,当然也可以根据模型要求设置为其他数值;再分别从深度图像缓存队列Q_D、灰度图像缓存队列Q_I中取出的三通道深度图像D_IMG、三通道灰度图像I_IMG,同时分别清空深度图像缓存队列Q_D、灰度图像缓存队列Q_I;
步骤S218,分别计算取出的三通道深度图像D_IMG、三通道灰度图像I_IMG的LBP-TOP特征(Local Binary Patterns from Three Orthogonal Planes),并将计算得到的三通道深度图像D_IMG、三通道灰度图像I_IMG的LBP-TOP特征拼接后放入基于综合特征的时序活体检测模型T_MODEL内计算时序模型得分;
步骤S219,若时序模型得分大于第三活体阈值,则认定为活体,否则未通过活体检测,则返回步骤S217。
在步骤S211中,分别对第一深度图像信息中的深度图像和近红外图像进行图像调整处理,包括以下步骤:
步骤S2111,分别对深度图像和近红外图像进行矫畸调整处理;
步骤S2112,分别对经过矫畸调整处理的深度图像和近红外图像进行滤波处理;
步骤S2113,根据像素值分别对经过滤波处理的深度图像和近红外图像进行动态压缩处理,在本实施例中,动态压缩至8比特。根据需求将工况距离设置为关心的深度范围,对此距离范围内的深度值进行拉升,提高对比度,对此距离外的深度值进行压缩。根据工况范围内的深度值像素坐标进行查找对应近红外图像上的像素值的最大、最小值坐标,根据坐标查找最大、最小值对近红外图像做动态调整,并压缩到8比特。
步骤S2114,分别对经过动态压缩处理的深度图像和近红外图像进行灰度值归一化处理。
在步骤S20中,根据活体检测处理结果对第一深度图像信息进行身份验证处理,包括以下步骤:
步骤S221,若活体检测处理结果认定为活体,则获取第一深度图像信息中的近红外图像;
步骤S221,将近红外图像与本地授权解锁车辆的身份库进行比对处理,若比对通过,则解锁车门,若比对不通过,则返回步骤S10。
在步骤S40中,获取车辆驾驶座人员的第二深度图像信息,并对第二深度图像信息进行人脸识别验证处理,包括:
步骤S41,当车门解锁后,通过安装在车辆驾驶位处的第二TOF相机以待机采集帧率采集车辆驾驶位外的深度图像信息;
步骤S42,对采集到的深度图像信息进行检测处理,以判断是否有人员坐在车辆驾驶座上;
步骤S43,若检测到有人员坐在车辆驾驶座上,则将第二TOF相机以工作采集帧率对车辆驾驶座人员进行图像采集处理,以获取车辆驾驶座人员的第二深度图像信息;若未检测到有人员坐在车辆驾驶座上,则返回步骤S41;
步骤S44,将第二深度图像信息中的近红外图像送入人脸检测模块进行人脸检测处理;
步骤S45,根据人脸检测处理结果判断是否存在人脸,若检测到人脸,则进入步骤S46,若未检测到人脸,则返回步骤S41;
步骤S46,将近红外图像与本地授权启动车辆的身份库进行比对处理;若比对通过,则授权启动车辆;若未比对通过,则返回步骤S41。
鉴于传统的无钥匙进入系统的不便利性和安全隐患,本发明通过利用TOF技术的深度传感器采集用户的生物特征,对用户进行活体检测、ID识别验证,验证通过即可进入车辆。若通过驾驶位的ID验证即可获得授权启动车辆。此外本发明为用户提供本地身份信息库,车主可选择性录入授权进入车辆的身份库和授权启动车辆的身份库,为家庭成员进入车辆提供便利性的同时确保未被授权启动车辆的家庭成员如小孩误启动车辆造成安全事故。
参见图2,图中给出的是一种车辆无钥匙进入与启动装置,包括第一TOF相机100、第二TOF相机200、第一深度图像信息处理模块300、活体检测与身份验证模块400、车门锁控制模块500、第二深度图像信息处理模块600以及车辆启动控制模块700。
第一TOF相机100安装在车门处,用于采集靠近车门人员的第一深度图像信息。
第二TOF相机200安装在车辆驾驶位处,用于采集车辆驾驶位人员的第二深度图像信息。
第一深度图像信息处理模块300用于获取靠近车门人员的第一深度图像信息,并对第一深度图像信息进行人脸检测处理。
活体检测与身份验证模块400用于根据人脸检测处理结果对第一深度图像信息进行活体检测处理,并根据活体检测处理结果对第一深度图像信息进行身份验证处理。
车门锁控制模块500用于根据身份验证处理结果控制车门是否解锁。
第二深度图像信息处理模块600用于当车门解锁后,获取车辆驾驶座人员的第二深度图像信息,并对第二深度图像信息进行人脸识别验证处理。
车辆启动控制模块700用于根据人脸识别验证处理结果控制车辆是否启动。
本发明的车辆无钥匙进入与启动装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于汽车控制系统中的处理器中,也可以以软件形式存储于汽车控制系统的存储器中,以便于处理器调用执行以上各个模块对应的操作。
本发明还提供了一种实现上述车辆无钥匙进入与启动方法的存储介质,其上存储有程序,该程序被处理器执行时实现以下步骤:
步骤S10,获取靠近车门人员的第一深度图像信息,并对第一深度图像信息进行人脸检测处理;
步骤S20,根据人脸检测处理结果对第一深度图像信息进行活体检测处理,并根据活体检测处理结果对第一深度图像信息进行身份验证处理;
步骤S30,根据身份验证处理结果控制车门是否解锁;
步骤S40,当车门解锁后,获取车辆驾驶座人员的第二深度图像信息,并对第二深度图像信息进行人脸识别验证处理;
步骤S50,根据人脸识别验证处理结果控制车辆是否启动。
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过程序来指令相关的硬件来完成,所述的程序可存储于一非易失性计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,本申请所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(ROM)、可编程ROM(PROM)、电可编程ROM(EPROM)、电可擦除可编程ROM(EEPROM)或闪存。易失性存储器可包括随机存取存储器(RAM)或者外部高速缓冲存储器。作为说明而非局限,RAM以多种形式可得,诸如静态RAM(SRAM)、动态RAM(DRAM)、同步DRAM(SDRAM)、双数据率SDRAM(DDRSDRAM)、增强型SDRAM(ESDRAM)、同步链路(Synchlink)DRAM(SLDRAM)、存储器总线(Rambus)直接RAM(RDRAM)、直接存储器总线动态RAM(DRDRAM)、以及存储器总线动态RAM(RDRAM)等。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。