挖土机
文献发布时间:2023-06-19 19:33:46
技术领域
本申请主张基于2021年10月29日申请的日本专利申请第2021-178377号的优先权。该日本申请的全部内容通过参考援用于本说明书中。
本发明涉及一种挖土机。
背景技术
以往,已知一种乘降时可以对设置于驾驶座侧方的控制台进行向后方弹起操作的挖土机(例如,参考专利文献1)。
专利文献1:国际公开2016/152700号
然而,通常,控制台的弹起操作是通过设置于控制台前部的上表面上的门杆(GateLever)的操作来实现的。因此,若一边操作门杆,一边使控制台向后方弹起,则位于控制台上方的扶手与握住门杆的用户的手可能会干涉。
发明内容
因此,鉴于上述课题,本发明的目的在于提供一种在挖土机中可以提高与驾驶座侧方的控制台的弹起有关的用户操作性的技术。
为了实现上述目的,在本发明的一种实施方式中,公开一种挖土机,其具备:
下部行走体;
上部回转体,回转自如地搭载于所述下部行走体;
驾驶室,搭载于所述上部回转体;
驾驶座,设置于所述驾驶室的内部;
控制台,设置于所述驾驶座的侧方;
扶手,安装于所述控制台;及
门杆,设置于所述控制台,
所述控制台通过操作所述门杆而向斜后方弹起,
当所述控制台弹起时,将所述扶手与所述门杆之间的间隔维持在规定基准以上。
发明效果
根据上述实施方式,在挖土机中能够提高与驾驶座侧方的控制台的弹起有关的用户操作性。
附图说明
图1是表示挖土机的一例的外观图。
图2是表示驾驶室内部的驾驶座周边的一例的立体图。
图3是表示控制台及扶手的支承结构的一例的图。
图4是表示伴随门杆操作的门闩(Gate Bar)动作的一例的图。
图5是表示控制台的弹起动作的一例的图。
图6是表示操作门杆的操作者的手与扶手的关系的一例的图。
图中:1-下部行走体,2-回转机构,3-上部回转体,4-动臂,5-斗杆,6-铲斗,10-驾驶室,22-驾驶座,25-控制台,25a-门闩,25b-门杆,27、27L、27R-操作杆,28-扶手,30-支承机构部,31-底座部,32-可动框架部,32A-旋转轴,32B-安装部,33-凸轮部(第1部件),33A-抵接部,33A1-抵接部,33A2-抵接部,40-支承机构部,41-基臂部,42-可动臂部(第2部件),42A-旋转轴,42B-销部,100-挖土机。
具体实施方式
以下,参考附图,对实施方式进行说明。
[挖土机的概要]
参考图1,对本实施方式所涉及的挖土机的概要进行说明。
图1是表示挖土机100的一例的外观图(左侧视图)。以下,如图1所示,从正上方观察挖土机100时,将动臂4(附属装置)延伸的方向设为“前”,以规定“前”、“后”、“左”、“右”、“上”及“下”的方向进行说明。
如图1所示,挖土机100包括下部行走体1、经由回转机构2回转自如地搭载于下部行走体1上的上部回转体3、附属装置AT及驾驶室10。
下部行走体1包括左右一对履带,通过由分别搭载于左右履带上的行走用液压马达来液压驱动而使挖土机100行走。
通过回转机构2由回转用液压马达来液压驱动,上部回转体3相对于下部行走体1进行回转。
附属装置AT包括动臂4、斗杆5及铲斗6。
动臂4可俯仰地安装于上部回转体3的前部的左右方向的中央,在动臂4的顶端,斗杆5以左右方向的轴为中心可旋转地被安装,在斗杆5的顶端,铲斗6以左右方向的轴为中心可旋转地被安装。
铲斗6是端接附件的一例。铲斗6例如用于挖掘作业等。
并且,在斗杆5的顶端,根据作业内容等,可以安装其他端接附件来代替铲斗6。其他端接附件例如可以是大型铲斗、斜坡用铲斗、疏浚用铲斗等其他类型的铲斗。并且,其他端接附件可以是搅拌机、破碎机、抓斗等除了铲斗以外类型的端接附件。并且,在斗杆5与端接附件之间,例如可以夹装快速联轴器、倾斜旋转器等辅助附属装置。
并且,在铲斗6上可以安装起重机作业用吊钩。吊钩的基端可转动地连结于连结斗杆5与铲斗6之间的铲斗销。由此,在进行挖掘作业等除了起重机作业(起吊作业)以外的作业的情况下,吊钩容纳于形成在两根铲斗连杆之间的空间中。
动臂4、斗杆5及铲斗6分别由作为液压致动器的动臂缸7、斗杆缸8及铲斗缸9液压驱动。
驾驶室10是操作者搭乘的驾驶室。驾驶室10例如搭载于上部回转体3的前部左侧,在左侧面上设置乘降口。
另外,在挖土机100中,各种液压致动器的一部分或全部可以替换为电动致动器。并且,挖土机100可以具有引擎(内燃机)作为发动机,也可以代替引擎或除此以外具有其他种类的发动机(例如,电动机等)。即,挖土机100可以是所谓的液压挖土机,也可以是所谓的混合式挖土机或电动挖土机。
[驾驶室的内部结构]
接着,参考图2,对驾驶室10的内部结构进行说明。
图2是表示驾驶室10内部的驾驶座22周边的一例的立体图。
如图2所示,在驾驶室10的内部包括基座21、驾驶座22、悬架23、调整操作部24、控制台25、26、操作杆27及扶手28、29。
基座21固定于驾驶室10内部的地板部的前后方向及左右方向的中央部。
驾驶座22固定在基座21上。驾驶座22例如在基座21上以沿前后方向可滑移地固定。在该情况下,驾驶座22可以相对于后述控制台25、26独立地沿前后方向滑动,也可以与控制台25、26一体地沿前后方向滑动,也可以两者均可。并且,驾驶座22经由悬架23被基座21支承。由此,能够减少驾驶座22的振动,并提高操作者的舒适度。例如,在基座21上沿前后方向延伸的滑动机构部(以下,为方便起见,称为“第1滑动机构部”)分别设置于左右端部,并且设置与左右第1滑动机构部的可动部(移动体)连结的底板。并且,驾驶座22经由悬架23支承(固定)在底板上。由此,驾驶座22通过第1滑动机构部能够与固定于底板上的控制台25、26一体地沿前后方向滑动。并且,例如,在悬架23上沿前后方向延伸的滑动机构部(以下,为方便起见,称为“第2滑动机构部”)分别设置于左右端部,驾驶座22安装于左右第2滑动机构部的可动部(移动体)。由此,驾驶座22通过第2滑动机构部能够相对于控制台25、26独立地沿前后方向滑动。
如上所述,悬架23设置于驾驶座22与基座21之间,吸收输入到驾驶室10中的振动等。由此,能够提高操作者的舒适度。
调整操作部24用于调整驾驶座22及驾驶座22周边的构成要件(例如,控制台25、26)的位置、姿势等。调整操作部24包括杆24A~24C。
杆24A用于解除将第1滑动机构部固定于不可移动状态的固定机构。由此,操作者通过操作杆24A,能够一体地调整驾驶座22及控制台25、26的前后位置。
杆24B用于解除将第2滑动机构部固定于不可移动状态的固定机构。由此,操作者通过操作杆24B,能够相对于控制台25、26独立地调整驾驶座22的前后位置。
杆25C用于调整控制台25、26的围绕左右方向的轴的姿势角度。由此,操作者通过操作杆25C,例如,能够调整控制台25、26的姿势角度,以容易操作操作杆27(操作杆27L、27R)。
控制台25遍及驾驶座22的前后方向的整个范围以与左侧相邻的方式沿着前后方向设置于相对低的上下方向的位置。如上所述,控制台25可以与驾驶座22向前后方向的滑动联动地移动,也可以不与驾驶座22向前后方向的移动联动地固定,也可以两者均可。以下,关于控制台26也可以相同。控制台25例如经由内置于其中的支承机构部30安装于基座21(参考图3)。在控制台25上设置门闩25a、门杆25b及操作杆27L。
门闩25a以在从控制台25的前表面的上端遍及下端的范围内延伸的方式设置,并与门杆25b的操作状态联动地进行动作。门闩25a以设置于上端部的左右方向的轴为中心可起伏地安装于控制台25内部的支承机构部30(参考图3)。
门杆25b在前后方向上配置于操作杆27与扶手28之间。其为机械输入部(操作部),用于切换挖土机100的可启动及基于操作杆27等的操作挖土机100的可操作状态与挖土机100的不可启动及操作状态。例如,搭载于挖土机100上的控制器根据门杆25b的操作状态来控制是否允许包括引擎等发动机的启动的挖土机100的启动。并且,例如,根据门杆25b的操作状态来切换从液压泵向各种液压设备的液压管路的连通及非连通,由此切换挖土机的液压致动器的可操作状态和不可操作状态。
在门杆25b处于挖土机100可操作状态的情况下,门闩25a处于朝前方立起的状态,以阻断驾驶座22与驾驶室10的乘降口之间的左右移动(参考图4A)。另一方面,在门杆25b处于挖土机100不可操作状态的情况下,门闩25a以朝下方伏下的状态容纳于控制台25的内部,以允许驾驶座22与驾驶室10的乘降口之间的左右移动。由此,只要门闩25a不是根据门杆25b的操作而朝前方突出的状态,则操作者就无法进行挖土机100的启动或操作,能够提高挖土机100的安全性。
控制台26遍及驾驶座22的前后方向的整个范围以与右侧相邻的方式沿着前后方向设置于相对低的上下方向的位置。控制台26例如经由内置于其中的未图示的支承机构部安装于基座21。在控制台26上设置操作杆27R。
操作杆27用于操作挖土机100的液压致动器。操作杆27包括操作杆27L、27R。
操作杆27L设置于左侧控制台25的上表面的前端部。操作杆27L例如用于操作斗杆缸8(斗杆5)及回转用液压马达(上部回转体3)。
操作杆27R设置于右侧控制台26的上表面的前端部。操作杆27R例如用于操作动臂缸7(动臂4)及铲斗缸9(铲斗6)。
扶手28以与驾驶座22的后部左侧相邻的方式沿着前后方向且配置于控制台25上。扶手28例如通过后端部的托架28A安装于支承机构部40,并经由支承机构部40安装于控制台25的支承机构部30(参考图3)。并且,扶手28相对于托架28A可旋转地被支承。由此,操作者例如在不利用扶手28的情况下,能够以手动使其从基准状态(图2的状态)向后方弹起。以下,关于扶手29也相同。
扶手29以与驾驶座22的后部右侧相邻的方式沿着前后方向且配置于控制台26上。扶手29例如通过未图示的后端部的托架安装于未图示的支承机构部,并经由该支承机构部安装于控制台26的支承机构部。
[控制台及扶手的支承结构]
接着,参考图3,对控制台25及扶手28的支承结构进行说明。
图3是表示控制台25及扶手28的支承结构的一例的图。具体而言,图3是表示支承控制台25的支承机构部30及支承扶手28的支承机构部40的一例的左侧视图。
支承机构部30包括底座部31和可动框架部32。
底座部31设置于控制台25内部的相对低的位置。底座部31例如安装于驾驶座22(悬架23)下方的底板,可以与基于第1滑动机构部的驾驶座22的前后方向的滑动联动地沿前后方向移动。由此,例如,若由操作者操作杆24A,则被支承机构部30支承的控制台25能够与驾驶座22的前后方向的移动联动地移动。
可动框架部32配置于底座部31上,并相对于底座部31以沿着下部左右方向的旋转轴32A为中心可旋转地被支承。控制台25、门闩25a、门杆25b及操作杆27L安装于可动框架部32。由此,控制台25能够配合相对于可动框架部32的基准状态(图3的状态)向后方的旋转(图中的右旋转)而向后方弹起(参考图5)。在可动框架部32的前部设置用于安装操作杆27L的安装部32B。在可动框架部32上设置以相对于底座部31不能旋转的状态固定的未图示的锁定机构。该锁定机构例如通过门杆25b的操作可以切换其动作及解除。
在可动框架部32的后端部,以与支承机构部40(可动臂部42)对置的方式设置凸轮部33。
凸轮部33(第1部件的一例)与支承机构部40(可动臂部42)抵接的同时,与可动框架部32的旋转联动地驱动支承机构部40(可动臂部42)。凸轮部33具有与支承机构部40(可动臂部42)抵接的抵接部33A。
抵接部33A包括抵接部33A1、33A2。抵接部33A1、33A2在侧视时具有曲面形状,以使相对于可动框架部32的旋转量的支承机构部40(可动臂部42)移动量(旋转量)彼此不同。以下,将支承机构部40(可动臂部42)的旋转量相对于可动框架部32的旋转量的比率(比例)简称为可动臂部42的旋转程度。
支承机构部40包括基臂部41和可动臂部42。
基臂部41固定于驾驶座22下方的底板或底座部31,并以朝向后斜上方延伸的方式设置。由此,被支承机构部40支承的扶手28能够与驾驶座22通过第1滑动机构部沿前后方向的滑动联动地沿前后方向移动。由此,例如,若由操作者操作杆24A,则被支承机构部40支承的扶手28能够与驾驶座22的前后方向的移动联动地移动。
可动臂部42(第2部件的一例)以设置于基臂部41的顶端部上的沿着左右方向的旋转轴42A为中心可旋转地被支承。在可动臂部42的顶端上安装扶手28的基端部(参考图4、图5)。可动臂部42以从基臂部41的顶端前倾的方式配置,在与可动框架部32(凸轮部33)对置的部位具有销部42B。
销部42B抵接于可动框架部32(凸轮部33的抵接部33A)。由此,可动臂部42的姿势角度由可动框架部32固定。然后,可动臂部42与可动臂部42的旋转即控制台25的弹起联动地向后方旋转,能够使扶手28向后方弹起。
销部42B在可动框架部32的基准状态下抵接于抵接部33A1。若可动框架部32从基准状态向后方(图中的右旋转)旋转,则销部42B抵接于抵接部33A1的曲面(图中的右旋转),同时可动臂部42向后方以相对大的旋转程度旋转。然后,若可动框架部32从基准状态以一定程度向后方旋转,则转移到销部42B抵接于抵接部33A2的曲面的状态,可动臂部42向后方以相对小的旋转程度旋转。以相对小的旋转程度旋转中包括旋转程度为零(0)的情况,即可动臂部42不旋转的情况。由此,能够配合控制台25弹起时的位置而改变相对于控制台25的弹起量的扶手28向后方的弹起状况。在该例(图3)中,在销部42B抵接于抵接部33A2的曲面的状态下,可动臂部42不以旋转轴42A为中心旋转,而维持从销部42B抵接于抵接部33A1的曲面的状态转移到抵接于抵接部33A2的曲面的状态时的姿势(参考图5B、5C)。
另外,相对于控制台25的弹起量的扶手28向后方的弹起状况,可以配合控制台25的弹起动作时的位置以三级以上改变,也可以连续改变。
[伴随门杆操作的门闩的动作]
接着,参考图4,对伴随门杆25b的操作的门闩25a的动作进行具体说明。
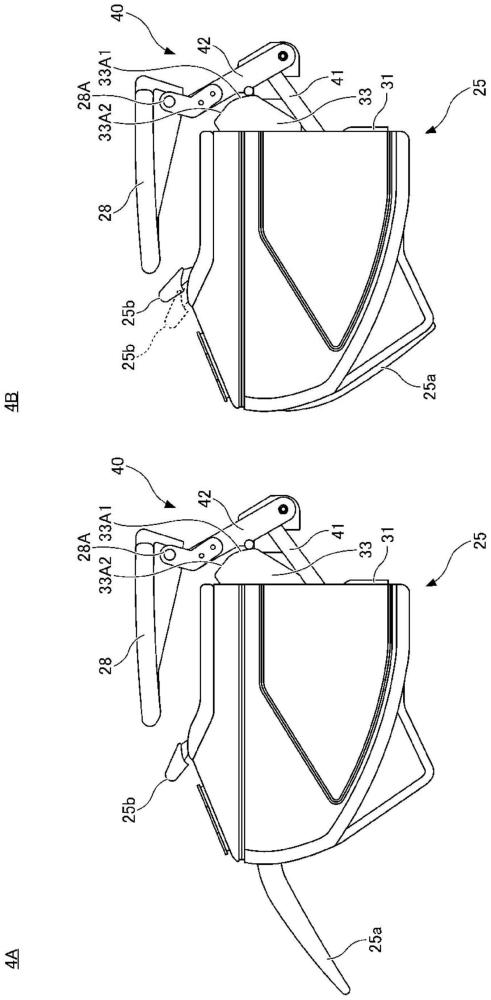
图4是表示伴随门杆25b的操作的门闩25a的动作的一例的图。具体而言,图4表示门闩25a从控制台25朝前方立起的状态(图4A)、以及门闩25a朝下方伏下并容纳于控制台25中的状态(图4B)。
另外,在图4中省略了操作杆27L等的图示。
如图4A所示,在门杆25b移动到最靠前方的操作状态(以下为“第1操作状态”)下,门闩25a从控制台25朝前方立起。由此,能够阻断驾驶座22与驾驶室10的乘降口之间的通行。并且,在门杆25b的第1操作状态下,维持挖土机100的可启动及操作状态。
另一方面,如图4B所示,门杆25b在从第1操作状态(点线状态)向后方仅被操作一级的操作状态(以下为“第2操作状态”)下,门闩25a处于容纳于控制台25中的状态。由此,能够允许驾驶座22与驾驶室10的乘降口之间的通行。并且,在门杆25b的第2操作状态下,维持挖土机100的不可启动及操作状态。
如此,通过门杆25b向前后方向的操作,能够将门闩25a在对驾驶座22与驾驶室10的乘降口之间的通行进行阻断的状态和允许的状态之间进行切换。
[伴随门杆操作的控制台的弹起动作]
接着,参考图5、图6,对伴随门杆25b的操作的控制台25的弹起动作进行具体说明。
图5表示控制台25的弹起动作的一例的图。具体而言,图5是表示控制台25的弹起动作开始时(图5A)、弹起动作的中途(图5B)、以及弹起动作完成时(图5C)的控制台25的周边的左侧视图。图6是表示操作门杆25b的操作者的手HD与扶手28之间的关系的一例的图。具体而言,图6是表示控制台25的弹起动作的前半部分(图6A)及后半部分(图6B)的操作者的手HD与扶手28之间的关系的侧视图。
另外,在图5中省略了操作杆27L等的图示。
如图5A所示,若门杆25b成为从第2操作状态(点线状态)向后方进一步被操作一级的状态(以下为“第3操作状态”),则控制台25(可动框架部32)的锁定机构被解除,控制台25可以弹起。
另外,门杆25b的第3操作状态被省略,在第2操作状态下锁定机构被解除,控制台25可以弹起。
如图5A、5B所示,在控制台25的弹起动作的前半部分,如上所述,销部42B抵接于抵接部33A1的同时,可动臂部42向后方旋转,扶手28与该旋转联动地向后方弹起。因此,在控制台25的弹起动作的前半部分,扶手28相对于控制台25的弹起量的弹起量,即扶手28的弹起程度,与后述控制台25的弹起动作的后半部分的情况相比相对变大。这是因为,如图6A所示,在控制台25的弹起动作的前半部分,门杆25b存在于扶手28的前端部的前方,需要确保与操作门杆25b的操作者的手HD的厚度较大的手背部分的间隙。
另一方面,如图5B、5C所示,在控制台25的弹起动作的后半部分,如上所述,销部42B抵接于抵接部33A2。在该情况下,可动臂部42根据控制台25的弹起动作维持其姿势状态。并且,可动臂部42可以根据控制台25的弹起动作向后方旋转,扶手28与该旋转联动地以比控制台25的弹起动作的前半部分的情况小的弹起程度向后方弹起。即,在控制台25的弹起动作的后半部分,扶手28相对于控制台25的弹起量的弹起量,即扶手28的弹起程度,与控制台25的弹起动作的前半部分的情况相比相对变小。这是因为,如图6B所示,在弹起动作的后半部分,门杆25b进入扶手28的下方,只要确保与操作门杆25b的操作者的手HD的厚度较小的手指部分的间隙即可。在该例中,如上所述,在控制台25的弹起动作的后半部分,扶手28的姿势状态保持原样,控制台25的弹起程度为零。这是因为,当控制台25的弹起动作的前半部分完成时,若门杆25b进入扶手28的下方且充分确保与扶手28之间的上下间隙,则即使维持扶手28的姿势状态,也能够避免操作门杆25b的操作者的手指与扶手28的干涉。
如此,在该例中,在控制台25的弹起动作时(从弹起动作开始到弹起动作完成的期间),能够将门杆25b与扶手28之间的间隔维持在可以避免与操作门杆25b的操作者的手HD的干涉的规定基准以上。例如,规定基准是与相当于操作门杆25b的操作者的手的厚度T和该手与扶手28之间所需间隙α的总和(=T+α)的距离有关的值(规定距离)。此时,在操作者的手的厚度T中,例如包括操作者的手背的厚度T1或手指的厚度T2。具体而言,在控制台25的弹起动作的前半部分,规定基准可以是与相当于操作门杆25b的操作者的手背的厚度T1和该手背与扶手28之间所需间隙α的总和(=T1+α)的距离有关的值。并且,在控制台25的弹起动作的后半部分,规定基准可以是与相当于操作门杆25b的操作者的手指的厚度T2和该手指与扶手28之间所需间隙α的总和(=T2+α)的距离有关的值。
另外,间隙α根据成为对象的手的部位(例如手指或手背等)可以相同,也可以不同。
[作用]
接着,对本实施方式所涉及的挖土机100的作用进行说明。
在本实施方式中,挖土机100具备:下部行走体1;上部回转体3,回转自如地搭载于下部行走体1;驾驶室10,搭载于上部回转体3;驾驶座22,设置于驾驶室10的内部;控制台25,设置于驾驶座22的侧方;扶手28,安装于控制台25;及门杆25b,设置于控制台25。然后,控制台25通过操作门杆25b而向斜后方弹起,当控制台25弹起时,将扶手28与门杆25b之间的间隔维持在规定基准以上。
由此,当控制台25的弹起动作时,能够抑制操作门杆25b的操作者的手与扶手28干涉的情况的发生。因此,能够提高与控制台25的控制台的弹起有关的操作者(用户)的操作性。
并且,在本实施方式中,上述规定基准可以根据控制台25弹起时的其位置而改变。
由此,配合与控制台25的位置对应的操作门杆25b的操作者的手与扶手28的位置关系,能够改变规定基准。因此,当控制台25的弹起动作时,能够更适当地确保操作门杆25b的操作者的手与扶手28的间隙。
并且,在本实施方式中,在从控制台25弹起开始到完成的区间中,在从开始到规定位置之间的区间与从规定位置到完成的区间之间,规定基准可以不同。例如,规定位置是销部42B抵接于抵接部33A1的状态与抵接于抵接部33A2的状态被切换的位置。
由此,例如,配合成为操作门杆25b的操作者的手的干涉对象的部位从手背部分改变为手指部分,能够更适当地确保操作门杆25b的操作者的手与扶手28之间的间隙。
并且,在本实施方式中,门杆25b可以在至少两个以上的位置之间移动。
由此,门杆25b使用两个位置能够实现门闩25a的状态切换、或挖土机100的可启动及操作状态与不可启动及操作状态的切换。然后,使用两个位置中的门闩25a容纳于控制台25中且相当于挖土机100不可启动及操作的状态的一个位置、或与两个位置不同的其他位置,能够实现控制台25的弹起动作。
并且,在本实施方式中,可以根据门杆25b相对于扶手28的位置变化,将扶手28与门杆25b之间的间隔维持在规定基准以上。例如,配合扶手28的前端位置与门杆25b的位置变化,将扶手28与门杆25b之间的间隔维持在规定基准以上。
由此,配合门杆25b相对于扶手28的相对位置关系,能够更适当地确保操作门杆25b的操作者的手与扶手28之间的间隙。
并且,在本实施方式中,挖土机100可以具备与控制台25一体移动的凸轮部33和与扶手28一体移动的可动臂部42。然后,当控制台25弹起时,凸轮部33(抵接部33A)与可动臂部42(销部42B)卡合,由此控制台25及扶手28联动,可以将扶手28与门杆25b之间的间隔维持在规定基准以上。
由此,能够使扶手28与控制台25的弹起动作联动,具体而言,能够将扶手28与门杆25b之间的间隔维持在规定基准以上。
以上,对实施方式进行了详述,但是本发明并不限定于这种特定实施方式,在技术方案所记载的主旨的范围内,可以进行各种变形和变更。