一种基于魔术球折纸结构的自感知仿水母水下驱动器
文献发布时间:2023-06-19 19:33:46
技术领域
本发明属于水下机器人驱动器领域,具体涉及一种基于魔术球折纸结构的自感知仿水母水下驱动器。
背景技术
随着时代发展和科技进步,水下资源勘探与开发、水下设备检修、水下生态保护和军事等领域的需求日渐提高,水下机器人的研究与应用得到了广泛关注。
传统水下机器人多用螺旋桨驱动方式,尽管在输出功率和工作性能方面有着良好的表现,但通常尺寸较大,存在着环境适应性差、噪声大、结构复杂等领域缺点。为克服传统水下机器人的以上缺点,有待于发展具有小型轻质、智能灵活、低噪隐蔽等优点的仿生水下机器人驱动器,从而为特种环境水下作业、复杂水域穿行、海洋数据采集、军事侦测等领域提供装备支持。
发明内容
针对现有技术存在的问题,本发明的目的在于提供一种基于魔术球折纸结构的自感知仿水母水下驱动器,从而实现水下机器人驱动器的轻质化、小型化和智能化需求,进而提高水下机器人的运动隐蔽性。
本发明的目的是通过以下技术方案来实现的:一种基于魔术球折纸结构的自感知仿水母水下驱动器,该驱动器包括主体部分、动力部分、控制部分和执行部分;
所述主体部分包括仿水母伞面、软体触须、魔术球结构和封闭薄膜;所述魔术球结构为两端小中间大的仿水母型结构;仿水母伞面安装魔术球结构外侧,软体触须连接在仿水母伞面底端,封闭薄膜安装在魔术球结构内部;
所述执行部分为弹性回复体,按照在魔术球结构内表面;
所述控制部分包括摩擦纳米发电机、Arduino芯片、进水电磁阀和排水电磁阀;所述摩擦纳米发电机工作模式为垂直接触—分离模式,布置于魔术球结构中心段,位于弹性回复体和封闭薄膜之间,为环状多层结构;Arduino芯片采集和分析摩擦纳米发电机的电压信号,从而控制进水电磁阀和排水电磁阀的的启闭,以实现魔术球结构的构型切换和该驱动器的脉冲式运动;
所述动力部分为电动水轮机系统,与进水电磁阀和排水电磁阀配合,实现魔术球结构内部的进水和排水;使得驱动器呈现进水扩张或者排水收缩状态,切换构型,进而改变摩擦纳米发电机工作模式,产生电压信号。
进一步地,魔术球结构为一体化结构,其中胞元数量由头部到中部逐行增大逐行增加,再由中部到尾部逐行减少,使整体结构具有一定程度的弧度,胞元尺寸由头部到中部逐行增大,再由中部到尾部逐行减小;头部和尾部的小尺寸胞元依靠小幅度的扩张与收拢分别在进水时吸入稳定流量的水流,在喷水时提高水流喷射速度;中部的大尺寸胞元依靠大幅度扩张与收拢增大摩擦纳米发电机的变形幅度,产生电信号。
进一步地,魔术球结构的构型切换特征为该驱动器的内腔形变提供支撑,其材质为PVC薄膜。
进一步地,弹性回复体的材质为硅胶,能够提供足够的弹性回复力,提高该驱动器尾部水流的喷射效果。
进一步地,采用纳米摩擦发电机和Arduino芯片作为控制核心,进而实现该驱动器的自感知运动控制;
所述摩擦纳米发电机作为夹层位于弹性回复体和封闭薄膜之间,由外向内依次分别为外侧导电铜箔、PTFE薄膜、尼龙薄膜和内侧导电铜箔。
进一步地,魔术球结构的胞元在变换构型时伸缩变形,使得位于弹性回复体和封闭薄膜之间夹层的纳米摩擦发电机有足够的接触分离过程,进而输出电信号至Arduino芯片。
进一步地,封闭薄膜采用TPU材质,布置于该驱动器内腔表面,将电子元器件与内腔水环境隔离,保证其工作稳定性。
进一步地,动力部分采用电动水轮机系统,包括密封壳、主轴、伺服电机、蓄电池组、导叶、转轮和连接管;
所述密封壳为透明薄壳结构,底部与导叶上侧连接,外形为锥面结构,内部为伺服电机和蓄电池组提供布放空间,伺服电机中心布置,蓄电池组环向均布;
所述主轴连接伺服电机和转轮进行同步运动,在进水电磁阀打开的前提下,外部水流能够在转轮作用下泵入魔术球结构内腔,使得该驱动器呈现进水扩张状态;
所述导叶上侧与密封壳底部连接,下侧与连接管一端连接,连接管另一端连接于进水电磁阀,导叶和转轮配合工作,以提高水流泵入效率。
进一步地,所述进水电磁阀和排水电磁阀均位于该驱动器的中轴线上,以保持运动平稳。
进一步地,仿水母伞面和软体触须均选用硅胶材质,适合水下环境。
本发明所提出的一种基于魔术球折纸结构的自感知仿水母水下驱动器,以电动水轮机系统为动力来源,结合魔术球折纸的构型变化和弹性回复体的复位能力,利用以摩擦纳米发电机和Arduino为核心的阀门控制系统,并在结构外形和运动机理两方面进行仿生设计,从而实现该驱动器在水下的脉冲式运动模式和自感知调控机制。
本发明所提出的一种基于魔术球折纸结构的自感知仿水母水下驱动器,具有驱控结构简单、轻量化、小型化、低噪等优点,具备水下运动和作业能力。该设计的发明,有助于解决传统水下机器人驱动结构复杂、噪声大、隐蔽性差等领域缺点。
附图说明
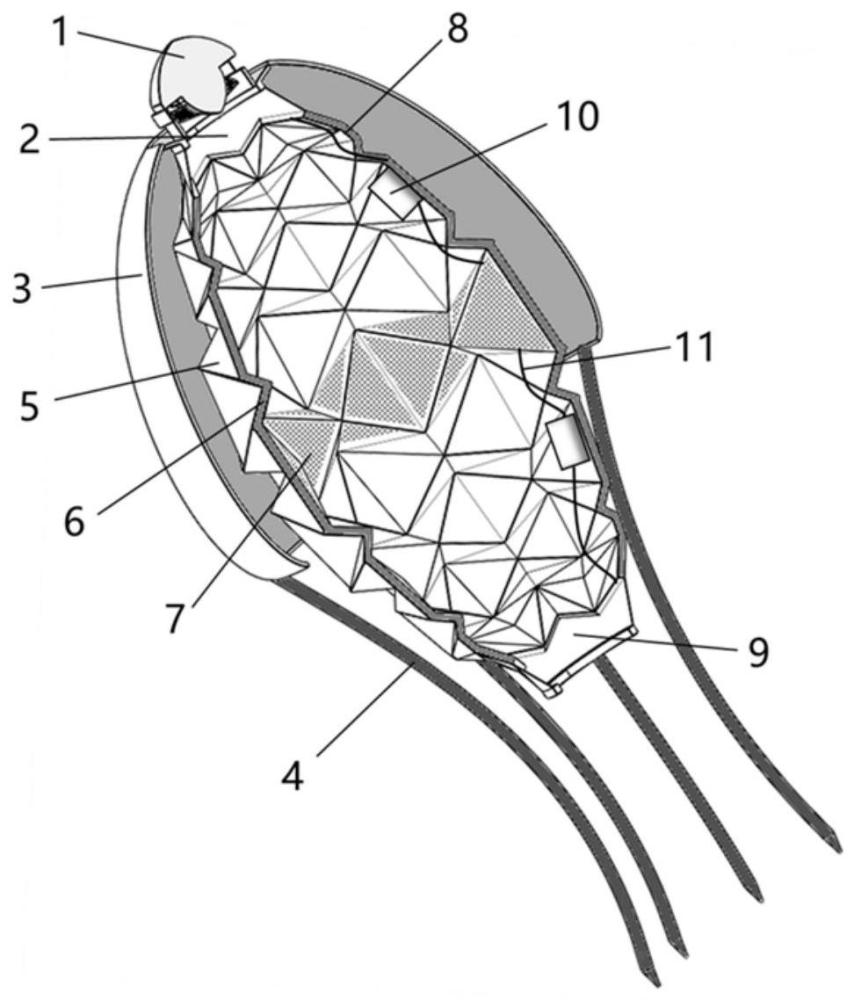
图1是本发明的水下驱动器的内部构造示意图。
图2是本发明的魔术球结构的构态和摩擦纳米发电机结构示意图。
图3是本发明的电动水轮机系统的构造示意图。
图4是本发明的驱动器运动机理示意图。
图5是本发明的魔术球结构折叠原理示意图。
图中:电动水轮机系统1;密封壳100;主轴101;伺服电机102;蓄电池组103;导叶104;转轮105;连接管105;进水电磁阀2;仿水母伞面3;软体触须4;魔术球结构5;弹性回复体6;摩擦纳米发电机7;外侧导电铜箔700;PTFE薄膜701;尼龙薄膜702;内侧导电铜箔703;封闭薄膜8;排水电磁阀9;Arduino芯片10;导线11。
具体实施方式
以下结合附图对本发明具体实施方式作进一步详细说明。
如图1-图4所示,本发明提供了一种基于魔术球折纸结构的自感知仿水母水下驱动器,包括电动水轮机系统1、进水电磁阀2、仿水母伞面3、软体触须4、魔术球结构5、弹性回复体6、摩擦纳米发电机7、封闭薄膜8、排水电磁阀9、Arduino芯片10和导线11,所述电动水轮机系统1包括密封壳100、主轴101、伺服电机102、蓄电池组103、导叶104、转轮105和连接管106,所述摩擦纳米电机为环状多层结构,包括外侧导电铜箔700、PTFE薄膜701、尼龙薄膜702和内侧导电铜箔703。
所述的一种基于魔术球折纸结构的自感知仿水母水下驱动器,魔术球结构5为PVC材质作一体化设计,具有柔韧性好、易成型、无毒无污染和耐水性好等优点,适用于水下环境。如图2所示,魔术球结构5为一体化结构,其中胞元数量由头部到中部逐行增大逐行增加,再由中部到尾部逐行减少,使整体结构具有一定程度的弧度,有利于中部的扩张变形及头部和尾部的收拢变形,进一步提高魔术球结构5的构型变换效果;胞元尺寸由头部到中部逐行增大,再由中部到尾部逐行减小;头部和尾部的小尺寸胞元依靠小幅度的扩张与收拢分别在进水时吸入稳定流量的水流,在喷水时提高水流喷射速度;中部的大尺寸胞元依靠大幅度扩张与收拢增大摩擦纳米发电机7的变形幅度,产生电信号。该结构可以在不同构型之间切换,呈现出扩张状态或收缩状态。
所述仿水母伞面3顶部安装魔术球结构5外侧,与进水电磁阀2侧翼相连,外观为流线型,材质为柔性硅胶,当该驱动器通过尾部喷水向前运动时可自适应收拢,从而减小水阻;当该驱动器通过头部进水呈现扩张状态时,可自适应张开,用于稳定静态位置。仿水母伞面3和软体触须4均选用硅胶材质,具有良好的伸缩性,耐寒、无毒、化学性质稳定的特点,适合水下环境。
所述的软体触须4连接于仿生水母伞面3底部边缘,材质为柔性硅胶,当该驱动器通过尾部喷水向前运动时可自适应收束,从而减小水阻;当该驱动器通过头部进水呈现扩张状态时可自适应散开,以保持运动平稳性。
所述进水电磁阀2和排水电磁阀9均位于该水下自驱动器的中轴线上,进水电磁阀2位于该驱动器头部,排水电磁阀9位于该驱动器尾部,两者均由Arduino芯片10控制,实现基于构型切换的自感知运动控制。
所述封闭薄膜8采用TPU材质,布置于该驱动器内腔表面,将摩擦纳米发电机7、Arduino芯片10、导线11与内腔水环境隔离,保证其工作稳定性。如图2中所示,该驱动器中心段的结构相对位置由外到内依次为:魔术球结构5、弹性回复体6、摩擦纳米发电机7和封闭薄膜8,这种布置方式充分保证了各器件之间的功能协调,包括魔术球结构5的构态切换功能、弹性回复体6的回弹复位功能、摩擦纳米发电机7的电信号激发功能、封闭薄膜8的密封防水功能。弹性回复体6的材质为硅胶,具有耐水耐寒、化学性质稳定、耐腐蚀性好等优点,韧性强,能够提供足够的弹性回复力,提高该驱动器尾部水流的喷射效果。
如图2中所示,所述摩擦纳米发电机7工作模式为垂直接触-分离模式,布置于魔术球结构5中心段,作为夹层位于弹性回复体6和封闭薄膜8之间,为环状多层结构,由外向内依次分别为内侧导电铜箔700,PTFE薄膜701,尼龙薄膜702,外侧导电铜箔703,所选用的摩擦层材料的电子亲和力有较大差异,可产生较为理想电信号,同时,魔术球结构5在变换构型时胞元伸缩变形的幅度大,从而保证摩擦纳米发电机7有充足的接触分离过程。具体地,当该驱动器通过头部进水呈现扩张状态时,PTFE薄膜701和尼龙薄膜702相互分离;当该驱动器通过尾部喷水呈现收缩状态时,PTFE薄膜和尼龙薄膜相互接触,在此运动过程中,摩擦纳米发电机产生具有高电压特征的电信号,该电信号通过Arduino芯片处理可以控制电磁阀的启闭。
所述Arduino芯片10可以采集和分析摩擦纳米发电机7的电压信号,从而控制进水电磁阀2和排水电磁阀9的的启闭,以实现魔术球结构5的构型切换和该驱动器的脉冲式运动。
如图3所示,所述动力部分采用电动水轮机系统1,包括密封壳100、主轴101、伺服电机102、蓄电池组103、导叶104、转轮105和连接管106。密封壳100为透明薄壳结构,底部与导叶104上侧连接,外形为低水阻锥面结构,内部为伺服电机102和蓄电池组103提供布放空间,伺服电机102中心布置,蓄电池组103环向均布。主轴101连接伺服电机102和转轮105进行同步运动,在进水电磁阀2打开的前提下,外部水流能够在转轮105作用下泵入魔术球结构5内腔,使得该驱动器呈现进水扩张状态。导叶104上侧与密封壳100底部连接,下侧与连接管106一端连接,连接管106另一端紧密连接于进水电磁阀2,导叶104环向布置数目为8,转轮105叶片环向布置数目为6,二者配合工作,以提高水流泵入效率。
结合图1-图3,以图4为例解释该水下驱动器的工作原理。进水电磁水阀2处于默认状态(开启状态),此时魔术球结构5处于收拢状态,外部水流在电动水轮机系统的作用下从驱动器头部泵入内腔,结构呈现进水扩张状态,胞元膨胀变形,使得嵌入其中的摩擦纳米发电机7的摩擦层发生接触分离产生电信号。进一步地,芯片Arduino10将所采集到的电压信号与设定的电压阈值进行比较,当电压信号高于设定的电压阈值时,Arduino芯片10向进水电磁阀2输出关闭信号,向排水电磁阀9输出开启信号,两个电磁阀的启闭切换指令设定一定时间差。进一步地,排水电磁阀9打开之后,该驱动器在弹性回复体6和外界水压共同作用下进入收缩喷水状态,内腔水通过排水电磁阀9喷射释放,水的反作用力促使该驱动器向前运动。在此之后,进水电磁阀2在Arduino芯片10控制下再次开启,如此循环,实现该自感知水下驱动器的仿生运动。本发明所提出的一种基于魔术球折纸结构的自感知仿水母水下驱动器,具有驱控结构简单、轻量化、小型化、低噪等优点,具备水下运动和作业能力。该设计的发明,有助于解决传统水下机器人驱动结构复杂、噪声大、隐蔽性差等领域缺点。
如图5所示,按PVC薄膜的折痕(实线代表山折,虚线代表谷折)折叠,并将左右两端粘合,形成魔术球结构5。
本申请作为监测数据器件的装载器,可以随水流运动如洋流收集海洋环境数据,比如海床地质情况,水流温度盐度度变化状况等等,便于探测未知或复杂的水域,丰富数据的多样性及降低海洋探测的成本。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。