一种烹饪机
文献发布时间:2024-01-17 01:27:33
技术领域
本申请涉及生活电器技术领域,尤其涉及一种烹饪机。
背景技术
相较于传统的炒菜锅具,烹饪机具有自动控温、自动翻炒、自动出菜等功能,然而,相关技术中的烹饪机没有炒锅定位功能,炒锅不能在相应的位置实现变转速运动,从而影响翻炒均匀性。
发明内容
本申请提供一种烹饪机,使得炒锅可以在相应的位置实现变转速运动以提高翻炒均匀性。
具体的,一种烹饪机,包括:底座,具有容纳腔以及与所述容纳腔连通的开口;锅体,所述锅体的至少部分可经所述开口放置于所述容纳腔;驱动组件,设置于所述底座,所述驱动组件与所述锅体连接,所述驱动组件用于驱动所述锅体转动;以及,位置检测组件,与所述驱动组件电性连接,所述位置检测组件用于对所述锅体的位置进行检测,并根据所述锅体的当前位置控制所述驱动组件。
在本申请一些实施例中,所述位置检测组件包括:控制器,与所述驱动组件电性连接;检测组件,与所述控制器电性连接,所述检测组件用于对所述锅体的位置进行检测,并根据所述锅体的位置向所述控制器发送位置信号,所述控制器根据所述位置信号确定所述锅体的位置,并根据所述锅体的当前位置控制所述驱动组件。在烹饪机的工作过程中,检测组件可以根据锅体的位置向控制器发送对应的位置信号,控制器可以对位置信号进行处理和分析等操作后,以确定锅体的位置,从而实现对锅体位置的检测,并且确定锅体的位置后,控制器还可以根据锅体的当前位置控制驱动组件驱动锅体进行相应的动作,如加速转动、减速转动或停止转动等。
在本申请一些实施例中,所述检测组件包括:第一检测件,安装于所述锅体上;第二检测件,安装于所述底座上,所述第二检测件用于与所述第一检测件配合,以对所述锅体的位置进行检测;其中,所述第一检测件以及所述第二检测件中的一者与所述控制器电性连接,并用于根据所述锅体的位置向所述控制器发送所述位置信号。第一检测件以及第二检测件中的一者可以对另一者进行感应,从而可以对所述锅体的位置进行检测。
在本申请一些实施例中,所述第一检测件包括磁体,所述第二检测件包括磁感应器,所述磁感应器与所述控制器电性连接,所述磁感应器用于对所述磁体的位置进行感应,并根据所述锅体的位置向所述控制器发送所述位置信号。驱动组件驱动锅体转动时,磁体随锅体移动,使得磁体与磁感应器之间的距离发生变化,磁感应器将电磁信号转化为位置信号并传输给控制器,这种非接触式的检测组件灵敏度高,使控制器对驱动组件的控制更加灵敏和准确。
在本申请一些实施例中,所述第一检测件包括隔热件,所述第二检测件包括温度感应器,所述温度感应器与所述控制器电性连接,所述温度感应器用于对所述隔热件的位置进行感应,并根据所述锅体的位置向所述控制器发送所述位置信号。驱动组件驱动锅体转动时,隔热件随锅体移动,使得隔热件与温度感应器之间的距离发生变化,温度感应器将温度信号转化为位置信号并传输给控制器,以实现锅体的位置检测。
在本申请一些实施例中,所述驱动组件包括:第一驱动件,设置于所述底座,所述第一驱动件与所述锅体连接,所述第一驱动件用于驱动所述锅体绕第一预设方向转动;第二驱动件,设置于所述底座,所述第二驱动件与所述锅体连接,所述第二驱动件用于驱动所述锅体绕第二预设方向转动,所述第二预设方向与所述第一预设方向垂直;其中,所述位置检测组件与所述第一驱动件以及所述第二驱动件电性连接,所述位置检测组件根据所述锅体的当前位置控制所述第一驱动件或/和所述第二驱动件。当使用烹饪机进行炒菜时,控制器可以控制第一驱动件驱动锅体绕第一预设方向转动来旋转炒菜,而当烹饪结束之后,控制器可以控制第二驱动件驱动锅体绕第二预设方向转动以将锅体内的食材倒出。
在本申请一些实施例中,所述锅体包括主体以及设置于所述主体上的锅耳,烹饪结束之后,在所述锅体绕所述第一预设方向转动至第一预设位置时,位置检测组件控制所述第一驱动件停止工作,以使所述锅耳处于防干扰区域。可以通过位置检测组件对锅体的位置进行检测,以在烹饪结束之后,并且锅耳处于防干扰区域时烹饪机才进行出菜,从而可以防止锅耳影响烹饪机的正常出菜。
在本申请一些实施例中,所述驱动组件还包括:转动轴,安装于所述底座上,所述转动轴的轴向与所述第二预设方向平行;其中,所述第二驱动件通过所述转动轴与所述锅体连接,所述第二驱动件驱动所述转动轴转动,以带动所述锅体绕第二预设方向转动;在所述锅体绕所述第一预设方向转动至所述第一预设位置时,所述锅耳与所述转动轴对应。烹饪结束之后,锅体绕第一预设方向转动至第一预设位置后,烹饪机进行出菜,此时位置检测组件可以控制第二驱动件驱动转动轴转动,转动轴带动锅体绕转动轴转动以进行出菜,此时锅耳与转动轴对应,出菜时锅耳完全处于食材移动的路径之外,可以很大程度避免锅耳影响烹饪机的正常出菜。
在本申请一些实施例中,所述位置检测组件包括:控制器,与所述第一驱动件以及所述第二驱动件电性连接;检测组件,与所述控制器电性连接,所述检测组件用于根据所述锅体的位置向所述控制器发送位置信号,所述控制器根据所述位置信号确定所述锅体的位置,并根据所述锅体的当前位置控制所述第一驱动件或/和所述第二驱动件;所述检测组件包括:第一检测件,安装于所述锅体上;第二检测件,安装于所述底座上,所述第二检测件用于与所述第一检测件配合,以对所述锅体的位置进行检测;其中,所述第一检测件以及所述第二检测件中的一者与所述控制器电性连接,并用于根据所述锅体的位置向所述控制器发送所述位置信号;所述锅耳为隔热锅耳,所述第一检测件安装于所述锅耳上。隔热锅耳可以减缓与锅体之间的热传导,烹饪过程中,锅耳的温度远低于锅体的温度,而将第一检测件安装于锅耳上,可以避免高温的锅体20对第一检测件造成损坏。
在本申请一些实施例中,所述第一检测件位于所述锅耳朝向所述底座的一侧。利用锅耳对第一检测件进行保护,防止第一检测件因碰撞等因素损坏,并且可以避免锅耳影响第一检测件与第二检测件之间的感应,进一步提升检测组件的检测精度。
在本申请一些实施例中,在所述锅体绕所述第一预设方向转动至第一预设位置时,所述第二检测件与所述第一检测件对应。第二检测件与第一检测件对应时,第二检测件与第一检测件的距离最短,第二检测件的感应强度最强,可以对第一预设位置进行更加精准的定位,从而可以使得锅体可以精准地停止于第一预设位置,可以极大程度避免锅耳影响烹饪机的正常出菜。
在本申请一些实施例中,所述检测组件还包括:第三检测件,安装于所述底座上,所述第三检测件用于与所述第一检测件配合,以对所述锅体的位置进行检测;第四检测件,安装于所述底座上,所述第四检测件用于与所述第一检测件配合,以对所述锅体的位置进行检测;其中,所述第三检测件与所述第四检测件相对设置,所述第三检测件以及所述第四检测件中均与所述控制器电性连接,所述第三检测件与所述第四检测件用于根据所述锅体的位置向所述控制器发送所述位置信号,所述控制器根据所述锅体的当前位置,控制所述第二驱动件驱动所述锅体绕所述第二预设方向转动,以使得所述锅耳在第二预设位置与第三预设位置之间往复摆动;在所述锅耳摆动至所述第二预设位置时,所述第三检测件与所述第一检测件对应;在所述锅耳摆动至所述第三预设位置时,所述第四检测件与所述第一检测件对应。可以通过第二驱动件驱动锅体往复摆动,使得锅耳在第二预设位置与第三预设位置之间往复摆动,从而可以利用锅体摆动时食材的惯性将粘附在锅体上的食材倒出,实现更佳的出菜效果。
本申请的有益效果为:驱动组件可以驱动锅体转动,以对锅体内的食材进行翻炒或将锅体内的食材倒出。以对锅体内的食材进行翻炒为例,通过设置与所述驱动组件电性连接的位置检测组件,位置检测组件可以对锅体的位置进行检测,并可以根据锅体的当前位置控制驱动组件,使得驱动组件可以驱动锅体在相应的位置实现变转速运动以提高翻炒均匀性。以将锅体内的食材倒出为例,位置检测组件可以对锅体的位置进行检测,并可以根据锅体的当前位置控制驱动组件,使得驱动组件驱动锅体在特定的位置将锅体内的食材倒出,以使得餐盘等容器可以准确承接锅体内的食材。
附图说明
为了更清楚地说明本申请实施例或相关技术中的技术方案,下面将对实施例或相关技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
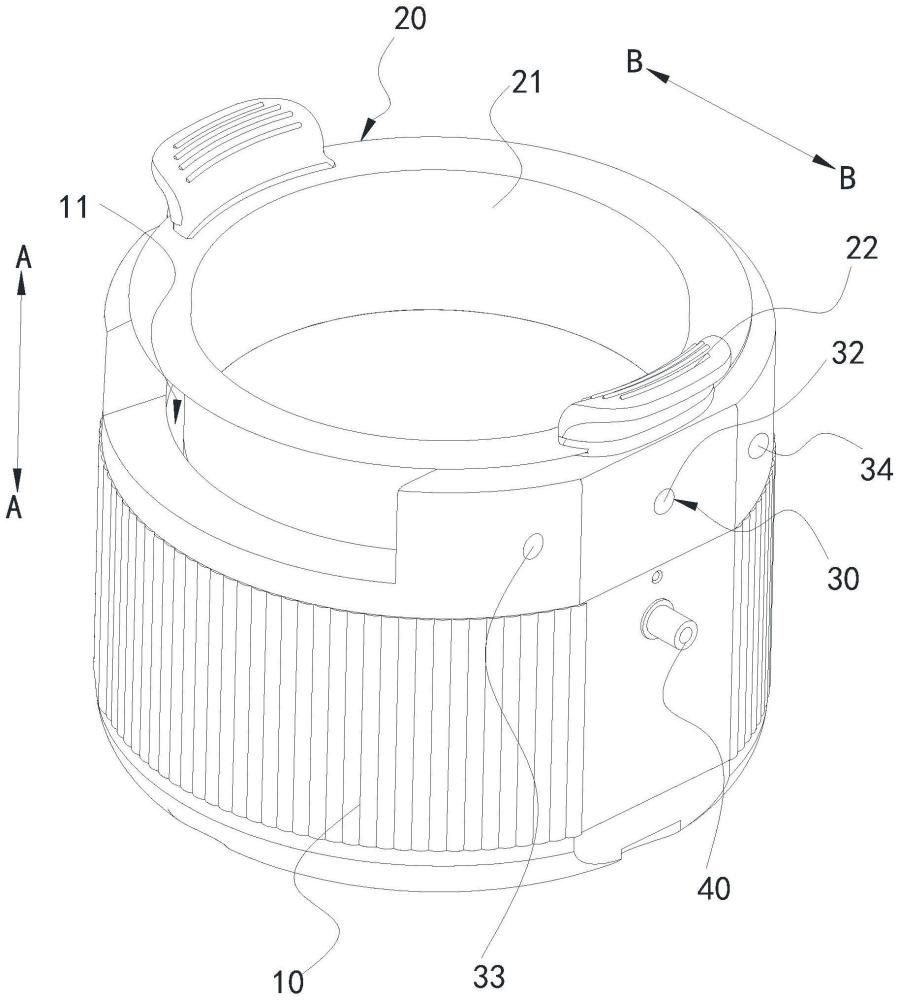
图1为本申请一实施例中锅体与底座分离时烹饪机的结构示意图;
图2为本申请一实施例中锅体放置于底座上时烹饪机的结构示意图;
图3为本申请一实施例中锅体放置于底座上时烹饪机的结构示意图。
附图标记:
10、底座;11、容纳腔;12、开口;20、锅体;21、主体;22、锅耳;30、检测组件;31、第一检测件;32、第二检测件;33、第三检测件;34、第四检测件;40、转动轴;50、支撑轴。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
繁琐的厨房操作阻碍了人们在家做饭的意愿,在智能化的大趋势下,烹饪机应运而生。相较于传统的炒菜锅具,烹饪机具有自动控温、自动翻炒、自动出菜等功能,然而,相关技术中的烹饪机没有炒锅定位功能,炒锅不能在相应的位置实现变转速运动,从而影响翻炒均匀性。
本申请提供一种烹饪机,用以解决相关技术中的烹饪机没有炒锅定位功能,导致炒锅不能在相应的位置实现变转速运动的问题。
具体的,如图1和图2所示,所述烹饪机包括底座10、锅体20、驱动组件(图中未示出)以及位置检测组件。
其中,底座10具有容纳腔11以及与所述容纳腔11连通的开口12;可以理解的是,底座10可以为锅体20提供支撑,烹饪机进行烹饪时,可以将底座10放置于一平整的台面上,此时容纳腔11的开口12朝上;底座10的整体形状可以呈圆筒状,当然,根据实际需求,底座10的整体形状也可以为其他形状,本申请不做具体限定。
所述锅体20的至少部分可经所述开口12放置于所述容纳腔11,锅体20用于盛放食材,并可以在锅体20内对食材进行烹饪,锅体20可以为铝锅体、不锈钢锅体、铁搪瓷锅体、铁锅体和不粘锅体等,本申请对锅体20的类型和尺寸不做具体限定。
所述驱动组件设置于所述底座10,所述驱动组件与所述锅体20连接,所述驱动组件用于驱动所述锅体20转动。
所述位置检测组件与所述驱动组件电性连接,所述位置检测组件用于对所述锅体20的位置进行检测,并根据所述锅体20的当前位置控制所述驱动组件。
可以理解的是,驱动组件可以驱动锅体20转动,以对锅体20内的食材进行翻炒或将锅体20内的食材倒出。以对锅体20内的食材进行翻炒为例,对于某些食材,需要锅体20在相应的位置实现变转速运动以提高翻炒均匀性,在本申请中,通过设置与所述驱动组件电性连接的位置检测组件,位置检测组件可以对锅体20的位置进行检测,并可以根据锅体20的当前位置控制驱动组件,使得驱动组件可以驱动锅体20在相应的位置实现变转速运动以提高翻炒均匀性。以将锅体20内的食材倒出为例,位置检测组件可以对锅体20的位置进行检测,并可以根据锅体20的当前位置控制驱动组件,使得驱动组件驱动锅体20在特定的位置将锅体20内的食材倒出,以使得餐盘等容器可以准确承接锅体20内的食材。
如图2和图3所示,在本申请一些实施例中,所述位置检测组件包括控制器(图中未示出)以及检测组件30。
所述控制器与所述驱动组件电性连接,所述控制器可以控制驱动组件,控制器可以为单片机等具有数据处理和控制功能的器件。
所述检测组件30与所述控制器电性连接,所述检测组件30用于对所述锅体20的位置进行检测,并根据所述锅体20的位置向所述控制器发送位置信号,所述控制器根据所述位置信号确定所述锅体20的位置,并根据所述锅体20的当前位置控制所述驱动组件。
可以理解的是,在烹饪机的工作过程中,检测组件30可以根据锅体20的位置向控制器发送对应的位置信号,控制器可以对位置信号进行处理和分析等操作后,以确定锅体20的位置,从而实现对锅体20位置的检测,并且确定锅体20的位置后,控制器还可以根据锅体20的当前位置控制驱动组件驱动锅体20进行相应的动作,如加速转动、减速转动或停止转动等。
还需要说明的是,根据实际需要,也可以将控制器集成于检测组件30中,使得检测组件30同时具备检测、数据处理和控制等功能。
具体的,继续参见图2和图3所示,所述检测组件30可以包括第一检测件31以及第二检测件32。
其中,所述第一检测件31可以安装于所述锅体20上;所述第二检测件32可以安装于所述底座10上,所述第二检测件32用于与所述第一检测件31配合,以对所述锅体20的位置进行检测;所述第一检测件31以及所述第二检测件32中的一者与所述控制器电性连接,并用于根据所述锅体20的位置向所述控制器发送位置信号。
可以理解的是,第一检测件31以及第二检测件32中的一者可以对另一者进行感应,从而可以对所述锅体20的位置进行检测。以第二检测件32对第一检测件31进行感应为例,驱动组件驱动锅体20转动时,第一检测件31随锅体20移动,使得第一检测件31与第二检测件32之间的距离发生变化,从而使得第二检测件32会产生对应的位置信号,控制器接收到第二检测件32发送的位置信号后可以确定锅体20的位置。
在本申请一实施例中,所述第一检测件31可以包括磁体,所述第二检测件32可以包括磁感应器,所述磁感应器与所述控制器电性连接,所述磁感应器用于对所述磁体的位置进行感应,并根据所述锅体20的位置向所述控制器发送位置信号。
需要说明的是,磁体可以为永磁体或非永久性磁铁;磁感应器可以为霍尔传感器或巨磁阻传感器等能够对磁场进行感应的器件;驱动组件驱动锅体20转动时,磁体随锅体20移动,使得磁体与磁感应器之间的距离发生变化,磁感应器将电磁信号转化为位置信号(电信号)并传输给控制器,这种非接触式的检测组件30灵敏度高,使控制器对驱动组件的控制更加灵敏和准确。磁感应检测的具体工作原理在相关技术中早有公示,本申请不做赘叙。
还需要说明的是,锅体20在烹饪时温度较高,将磁铁设置于锅体20,而将磁感应器设置于底座10,可以防止磁感应器等敏感器件被高温的锅体20损坏,并且若磁感应器与控制器通过导电连接线连接时,导电连接线也不用随锅体20转动,也可以防止导电连接线与高温的锅体20接触。
在本申请另一实施例中,所述第一检测件31包括隔热件,所述第二检测件32包括温度感应器,所述温度感应器与所述控制器电性连接,所述温度感应器用于对所述隔热件的位置进行感应,并根据所述锅体20的位置向所述控制器发送所述位置信号。
需要说明的是,隔热件可以减缓与锅体20之间的热传导,烹饪过程中,隔热件的温度远低于锅体20的温度,隔热件的制备材料可以为隔热塑料、气凝胶毡或隔热树脂等具有良好隔热性能的材料;温度感应器可以为红外传感器、数字式温度传感器或模拟温度传感器等能够对隔热件的温度进行感应的器件;驱动组件驱动锅体20转动时,隔热件随锅体20移动,使得隔热件与温度感应器之间的距离发生变化,温度感应器将温度信号转化为位置信号(电信号)并传输给控制器,温度检测的具体工作原理在相关技术中早有公示,本申请不做赘叙。
还需要说明的是,根据实际需求,第一检测件31与第二检测件32也可以为其他具有位置检测功能的器件,如第一检测件31为声音发射器,第二检测件32为声音传感器,声音传感器对声音传感器发射的声音进行检测,并将音波信号转化为位置信号(电信号)并传输给控制器,以实现对锅体20的位置检测。又如第一检测件31为定标物,第二检测件32为相机,相机可以对锅体20进行拍摄,并将拍摄的照片传输给控制器,控制器根据照片中定标物的位置确定锅体20的位置。
继续参见图2和图3所示,在本申请一实施例中,所述驱动组件包括第一驱动件(图中未示出)以及第二驱动件(图中未示出)。
所述第一驱动件设置于所述底座10,所述第一驱动件与所述锅体20连接,所述第一驱动件用于驱动所述锅体20绕第一预设方向AA转动。需要说明的是,所述第一驱动件可以位于容纳腔11内或容纳腔11外,第一驱动件是具有动力且能够带动锅体20移动的装置,如马达或电机,第一驱动件可以采用电力驱动、内燃机驱动、磁力驱动等,本领域中常见的驱动类型均满足使用需求。第一驱动件与锅体20之间可以采用如粘接、抵接、螺接等常见的直接连接方式,也可以没有直接的连接,而通过磁场、电场等来进行力的传递,当然,第一驱动件与锅体20之间也可以通过齿轮、连杆等传动件连接。
所述第二驱动件设置于所述底座10,所述第二驱动件与所述锅体20连接,所述第二驱动件用于驱动所述锅体20绕第二预设方向BB转动,所述第二预设方向BB与所述第一预设方向AA垂直。需要说明的是,所述第二驱动件可以位于容纳腔11内或容纳腔11外,第二驱动件是具有动力且能够带动锅体20移动的装置,如马达或电机,第二驱动件可以采用电力驱动、内燃机驱动、磁力驱动等,本领域中常见的驱动类型均满足使用需求。第二驱动件与锅体20之间可以采用如粘接、抵接、螺接等常见的直接连接方式,也可以没有直接的连接,而通过磁场、电场等来进行力的传递,当然,第二驱动件与锅体20之间也可以通过齿轮、连杆等传动件连接。第二驱动件的类型可以与第一驱动件的类型相同或不同,可以根据实际需求进行选择,本申请不做限定。
其中,所述控制器与所述第一驱动件以及所述第二驱动件电性连接,所述位置检测组件根据所述锅体20的当前位置控制所述第一驱动件或/和所述第二驱动件。
需要说明的是,当使用烹饪机进行炒菜时,控制器可以控制第一驱动件驱动锅体20绕第一预设方向AA转动来旋转炒菜,而当烹饪结束之后,控制器可以控制第二驱动件驱动锅体20绕第二预设方向BB转动以将锅体20内的食材倒出;以烹饪机进行炒菜时,第一预设方向AA即为竖向,第二预设方向BB为与第一预设方向AA垂直的水平方向;以底座10的整体形状为圆筒状为例,第一预设方向AA为与底座10的轴向平行的方向。
还需要说明的是,控制器还可以根据锅体20的当前位置控制第一驱动件驱动锅体20绕第一预设方向AA转动的转速和旋转方向,以实现变转速运动等功能;控制器也可以根据锅体20的当前位置控制第二驱动件驱动锅体20绕第二预设方向BB转动的转速和旋转方向,以使得锅体20往复摆动以达到辅助出菜等功能。
还可以理解的是,在所述驱动组件包括所述第一驱动件以及所述第二驱动件时,所述控制器可以与所述第一驱动件以及所述第二驱动件电性连接;所述检测组件30与所述控制器电性连接,所述检测组件30用于根据所述锅体20的位置向所述控制器发送位置信号,所述控制器可以根据所述位置信号确定所述锅体20的位置,并根据所述锅体20的当前位置控制所述第一驱动件或/和所述第二驱动件。
继续参见图2和图3所示,在本申请一些实施例中,所述锅体20包括主体21以及设置于所述主体21上的锅耳22,锅耳22可以便于用户持拿锅体20,锅耳22可以设置于主体21的边缘位置,当然,根据实际需求,锅耳22也可以设置于主体21的其他位置。
其中,烹饪结束之后,在所述锅体20绕所述第一预设方向AA转动至第一预设位置时,位置检测组件控制所述第一驱动件停止工作,以使所述锅耳22处于防干扰区域。
需要说明的是,烹饪结束之后,控制器需要控制第二驱动件驱动锅体20绕第二预设方向BB转动以出菜,若此时锅耳22处于食材移动的路径上,锅耳22会影响烹饪机的正常出菜。
还需要说明的是,在本申请中,可以通过位置检测组件对锅体20的位置进行检测,以在烹饪结束之后,并且锅耳22处于防干扰区域时烹饪机才进行出菜,从而可以防止锅耳22影响烹饪机的正常出菜。防干扰区域可以理解为锅耳22不会影响烹饪机的正常出菜的区域,防干扰区域的具体范围大小与锅体20的大小以及锅耳22的大小等因素有关,防干扰区域的具体范围大小可以根据实际需求进行选择。第一预设位置的具体位置可以根据实际需求进行选择,本申请不做具体限定。
继续参见图2和图3所示,在本申请一实施例中,所述驱动组件还包括转动轴40,所述转动轴40安装于所述底座10上,所述转动轴40的轴向与所述第二预设方向BB平行。
其中,所述第二驱动件通过所述转动轴40与所述锅体20连接,所述第二驱动件驱动所述转动轴40转动,以带动所述锅体20绕第二预设方向BB转动;在所述锅体20绕所述第一预设方向AA转动至所述第一预设位置时,所述锅耳22与所述转动轴40对应。
可以理解的是,烹饪结束之后,锅体20绕第一预设方向AA转动至第一预设位置后,烹饪机进行出菜,此时位置检测组件可以控制第二驱动件驱动转动轴40转动,转动轴40带动锅体20绕转动轴40转动以进行出菜,此时锅耳22与转动轴40对应,出菜时锅耳22完全处于食材移动的路径之外,可以很大程度避免锅耳22影响烹饪机的正常出菜。
需要说明的是,转动轴40可以安装于底座10上,且转动轴40与底座10绕转动轴40的轴向转动连接,锅体20放置于底座10上后,将转动轴40与锅体20的外侧壁抵触,可以通过转动转动轴40带动锅体20绕第二预设方向BB转动;当然,转动轴40也可以安装于锅体20上,转动轴40的安装位置可以根据实际需求进行选择。
还需要说明的是,所述驱动组件还可以包括支撑轴50(如图1),支撑轴50的中心轴线与转动轴40的中心轴线重合,且支撑轴50与转动轴40分别位于锅体20的两侧,支撑轴50与底座10绕支撑轴50的轴向转动连接,锅体20绕第二预设方向BB转动时,锅体20的一侧通过转动轴40进行支撑,锅体20的另一侧通过支撑轴50进行支撑。
继续参见图2和图3所示,在本申请一实施例中,所述锅耳22可以为隔热锅耳22,所述第一检测件31安装于所述锅耳22上。
需要说明的是,隔热锅耳22可以减缓与锅体20之间的热传导,烹饪过程中,锅耳22的温度远低于锅体20的温度,而将第一检测件31安装于锅耳22上,可以避免高温的锅体20对第一检测件31造成损坏。锅耳22的制备材料可以为隔热塑料、气凝胶毡或隔热树脂等具有良好隔热性能的材料。
还需要说明的是,第一检测件31与锅耳22可以为完全不同的两个器件,第一检测件31也可以与锅耳22一体成型;以第一检测件31包括磁体为例,此时锅耳22可以由非磁性隔热材料制成,磁体仅通过粘接、焊接、螺纹连接或铆接等方式安装于锅耳22上,当然,此时锅耳22也可以由磁性隔热材料制成,磁体与锅耳22可以一体成型,对磁体的位置进行检测即为对锅耳22的位置进行检测;以第一检测件31包括隔热件为例,此时隔热件可以仅通过粘接、焊接、螺纹连接或铆接等方式安装于锅耳22上,当然,此时隔热件于锅耳22也可以一体成型,对磁体的位置进行检测即为对锅耳22的位置进行检测。
继续参见图2和图3所示,其中,所述第一检测件31可以位于所述锅耳22朝向所述底座10的一侧,以利用锅耳22对第一检测件31进行保护,防止第一检测件31因碰撞等因素损坏,并且可以避免锅耳22影响第一检测件31与第二检测件32之间的感应,进一步提升检测组件30的检测精度。
在本申请一实施例中,在所述锅体20绕所述第一预设方向AA转动至第一预设位置时,所述第二检测件32与所述第一检测件31对应。
需要说明的是,第二检测件32与第一检测件31对应时,第二检测件32与第一检测件31的距离最短,第二检测件32的感应强度最强,可以对第一预设位置进行更加精准的定位,从而可以使得锅体20可以精准地停止于第一预设位置,可以极大程度避免锅耳22影响烹饪机的正常出菜。
以第一检测件31包括磁铁,第二检测件32包括磁感应器为例,第一检测件31移动到与第二检测件32对应时,第二检测件32与第一检测件31之间的距离最短,此时磁感应器的磁感应最强,此时磁感应器的磁感应强度与磁铁在其他位置时的磁感应强度有明显区别,从而可以对第一预设位置进行更加精准的定位。以第一检测件31包括隔热件,第二检测件32包括温度感应器为例,第一检测件31移动到与第二检测件32对应时,第二检测件32与第一检测件31之间的距离最短,由于隔热件的温度远低于锅体20的温度,此时温度感应器感应到的温度与隔热件在其他位置时感应到的温度有明显区别,从而可以使得锅体20可以精准地停止于第一预设位置。
继续参见图2和图3所示,在本申请一实施例中,所述位置检测组件还包括第三检测件33以及第四检测件34。
所述第三检测件33安装于所述底座10上,所述第三检测件33用于与所述第一检测件31配合,以对所述锅体20的位置进行检测。
所述第四检测件34安装于所述底座10上,所述第四检测件34用于与所述第一检测件31配合,以对所述锅体20的位置进行检测。
其中,所述第三检测件33与所述第四检测件34相对设置,所述第三检测件33以及所述第四检测件34中均与所述控制器电性连接,所述第三检测件33与所述第四检测件34用于根据所述锅体20的位置向所述控制器发送所述位置信号,所述控制器根据所述锅体20的当前位置,控制所述第二驱动件驱动所述锅体20绕所述第二预设方向BB转动,以使得所述锅耳22在第二预设位置与第三预设位置之间往复摆动;在所述锅耳22摆动至所述第二预设位置时,所述第三检测件33与所述第一检测件31对应;在所述锅耳22摆动至所述第三预设位置时,所述第四检测件34与所述第一检测件31对应。
可以理解的是,在进行出菜时,有些食材容易粘附在锅体20上导致出菜效果不佳,此时可以通过第二驱动件驱动锅体20往复摆动,使得锅耳22在第二预设位置与第三预设位置之间往复摆动,可以利用锅体20摆动时食材的惯性将粘附在锅体20上的食材倒出,实现更佳的出菜效果,而第三检测件33以及第四检测件34与第一检测件31的配合,可以对锅体20摆动的位置实现精度定位,如锅体20转动至第三检测件33与所述第一检测件31对应时,控制器控制第二驱动件驱动锅体20变向转动,同理锅体20转动至第四检测件34与所述第一检测件31对应时,控制器控制第二驱动件驱动锅体20变向转动。
以上所述仅为本申请的较佳实施例而已,并不用以限制本申请,凡在本申请的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本申请的保护范围之内。
- 一种在连续烹调的自动烹饪机中自动调整烹饪次序的方法
- 一种电子烹饪器具烹饪食物的控制方法及其电子烹饪器具
- 一种烹饪效果的智能评分方法、烹饪系统及烹饪器具
- 滚筒式烹饪机的工作模式选择方法及滚筒式烹饪机
- 一种多功能智能烹饪机及控制方法
- 烹饪机的烹饪方法、烹饪装置、电子设备及烹饪机
- 烹饪机杯体、烹饪机底座及烹饪机