运动检测装置
文献发布时间:2023-06-19 09:23:00
技术领域
本发明涉及一种检测用于远程操作多关节机器人的操作者的手指的运动的运动检测装置。
背景技术
以往,使用作为多关节机器人的一例的机械手被操作者远程操作的远程操作系统。例如,在下述的专利文献1中公开了以下技术:操作者佩戴在内部设置有用于检测手指的动作的传感器、光纤的手套,使机械手模仿检测到的手指的动作来进行动作。
专利文献1:日本特开平4-210390号公报
发明内容
但是,在上述的手套中,例如使用为了检测手指的运动而弯曲的类型的传感器,但此种传感器存在易于破损、另外检测精度低的问题点。另外,操作者需要以避免内部的传感器等破损的方式佩戴手套,因此存在难以佩戴手套的问题点。
因此,本发明是鉴于这些点而完成的,目的在于提供一种能够高精度地检测用于使多关节机器人进行动作的操作者的手的运动、并且耐久性和佩戴的简便性优异的运动检测装置。
在本发明的一个方式中,提供一种运动检测装置,检测用于远程操作多关节机器人的操作者的手指的运动,所述运动检测装置具备:装置主体,其设置成被放置所述手指;接触部,其以模仿所述手指的形状的方式形成于所述装置主体,供所述手指接触;以及检测部,其基于所述手指对于所述接触部按压的按压状态来检测所述手指的运动。
另外,可以设为所述接触部中的供所述手指的指腹接触的区域朝向所述手指侧弯曲成凸状。
另外,可以设为:所述接触部具有转动部,所述转动部根据所述手指的按压而绕轴部转动,所述检测部基于所述手指对于所述转动部按压的按压状态来检测所述手指的运动。
另外,可以设为所述接触部根据所述手指的按压状态而弹性形变。
另外,可以设为所述接触部是以模仿所述手指的形状的方式形成的槽部。
另外,可以设为所述槽部形成于所述装置主体的外周面。
另外,可以设为所述装置主体具有能够插入所述手指的插入孔部,所述接触部被设置于所述插入孔部。
另外,可以设为:所述装置主体具有球体部,所述球体部由球形状或者椭圆体的一部分或者全部构成,所述接触部被设置于所述球体部。
另外,可以设为:所述检测部具有指节检测部,所述指节检测部被配置于与接触着所述接触部的所述手指的基节、中节及末节中的至少一个指节相对应的位置,检测该指节的按压状态。
另外,可以设为:所述接触部具有转动部,所述转动部根据所述手指的按压而绕轴部转动,所述检测部还具有位置检测部,所述位置检测部检测所述手指的指尖的位置,所述检测部基于所述转动部的转动量以及所述位置检测部检测到的所述指尖的位置,来检测所述手指的运动。
另外,可以设为:所述接触部具有转动部,所述转动部根据所述手指的按压而绕轴部转动,所述指节检测部和所述位置检测部被设置于所述转动部。
另外,可以设为:所述检测部被配置于所述槽部中的供所述手指的侧表面接触的区域,检测所述手指的左右方向中的至少一方的运动。
另外,可以设为:所述检测部被配置于所述插入孔部中的供所述手指的侧表面接触的区域,检测所述手指的左右方向中的至少一方的运动。
另外,可以设为:所述运动检测装置还具备力觉产生部,所述力觉产生部产生与所述多关节机器人接触物体时的来自所述物体的反作用力相对应的力觉。
另外,可以设为:所述接触部具有转动部,所述转动部根据所述手指的按压而绕轴部向第一方向转动,所述力觉产生部具有驱动部,所述驱动部使所述转动部向所述第一方向的相反方向即第二方向转动,所述力觉产生部通过利用该驱动部使所述转动部向所述第二方向旋转来产生所述力觉。
根据本发明,起到以下效果:能够提供一种能够高精度地检测用于使多关节机器人进行动作的操作者的手的运动、并且耐久性和佩戴的简便性优异的运动检测装置。
附图说明
图1是用于说明本发明的一个实施方式所涉及的机器人的远程操作系统S的结构的框图。
图2是用于说明多指机器人10的结构的一例的示意图。
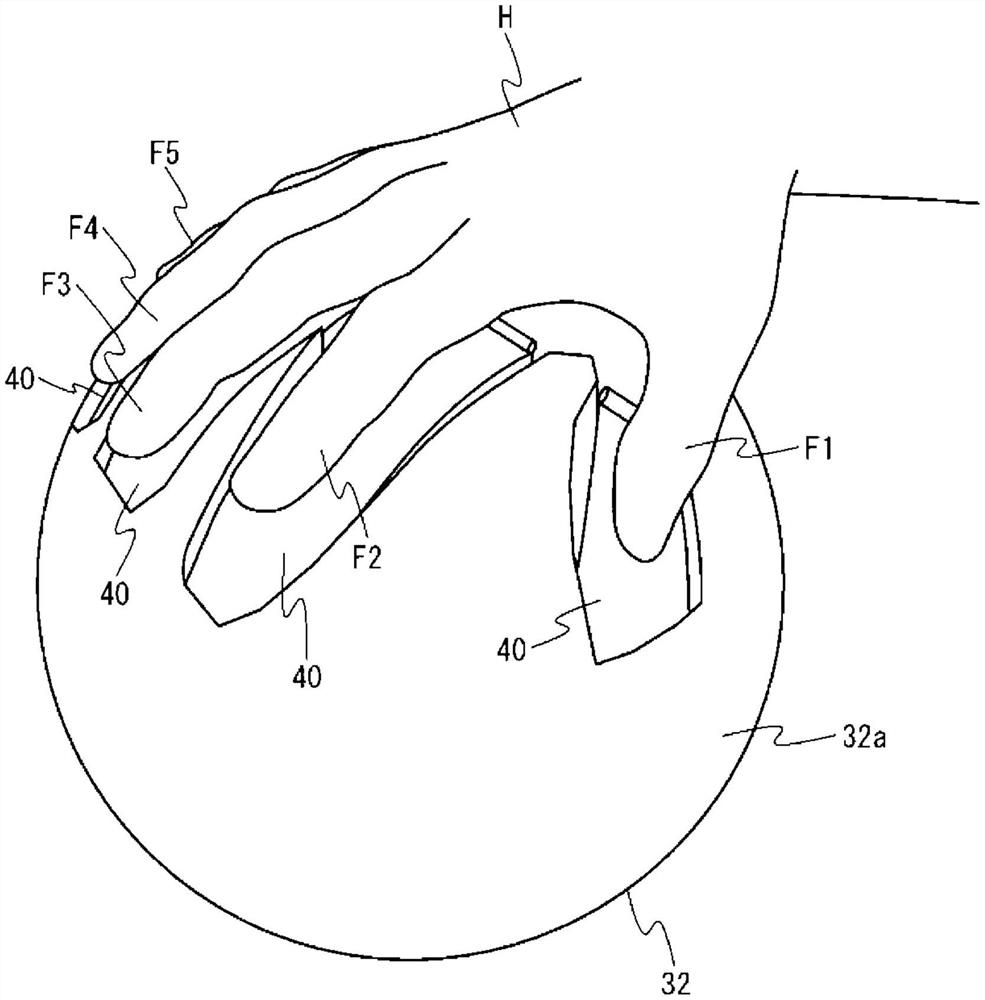
图3是示出操作者的右手放置于装置主体32的状态的一例的示意图。
图4是示出操作者弯曲了右手的手指的状态的一例的示意图。
图5是用于说明装置主体32的结构的一例的示意图。
图6是从后侧观察图5所示的装置主体32的示意图。
图7是用于说明指尖的位置的检测的示意图。
图8是用于说明手指的左右方向的运动的示意图。
图9是用于说明指节检测部52的配置状态的一例的示意图。
图10是用于说明驱动部62的结构的一例的示意图。
图11是用于说明驱动部62的结构的变形例的示意图。
图12是用于说明变形例所涉及的装置主体32的结构的示意图。
具体实施方式
<机器人的远程操作系统的结构>
参照图1来说明本发明的一个实施方式所涉及的机器人的远程操作系统的结构。
图1是用于说明一个实施方式所涉及的机器人的远程操作系统S的结构的框图。如图1所示,远程操作系统S具有多指机器人10、运动检测装置30以及控制装置70。远程操作系统S通过运动检测装置30来检测进行远程操作的操作者的手(具体来说是手指)的运动,与检测到的手的运动连动地使多指机器人10动作。
图2是用于说明多指机器人10的结构的一例的示意图。多指机器人10是被操作者远程操作的多关节机器人。在此,如图2所示,多指机器人10是以模仿人的手的方式形成的人型的机械手。多指机器人10接触物体或抓住物体。作为多指机器人10,在图2中仅示出模仿人的右手的机械手,模仿人的左手的机械手也是相同的结构。如图1所示,多指机器人10具有手指机构12和驱动源14。
如图2所示,与人的手的5根手指(拇指、食指、中指、无名指、小指)对应地设置5个手指机构12。5个手指机构12分别是被驱动源14驱动的关节机构。
驱动源14是马达等致动器。驱动源14例如通过引线驱动使手指机构12动作。多指机器人10从控制装置70接受动作的指令,与远程操作的操作者的手的5根手指的运动连动地使对应的手指机构12分别进行动作。
运动检测装置30是检测用于远程操作多指机器人10的操作者的手(具体来说是手指)的运动的检测装置。在此,运动检测装置30包括检测操作者的左手的手指的运动的左手用检测装置以及检测操作者的右手的手指的运动的右手用检测装置。左手用检测装置和右手用检测装置的结构是相同的。
如图1所示,运动检测装置30具有装置主体32、检测部50以及力觉产生部60。
在此,装置主体32设置成操作者易于放置手。例如,装置主体32被设置在处于坐姿或者站姿的操作者易于放置手的位置。操作者在将手放置于装置主体32的状态下,使手指进行运动。例如,操作者将放置于装置主体32的手指弯曲或伸展。另外,操作者扩大或缩小两根手指的间隔。
装置主体32包括供操作者的左手放置的左手用主体以及供右手放置的右手用主体。操作者将左手的手指放置于左手用主体后使该手指进行运动,将右手的手指放置于右手用主体后使该手指进行运动。此外,左手用主体和右手用主体是同一结构,因此以下列举右手用主体为例来说明装置主体32。
图3是示出操作者的右手H放置于装置主体32的状态的一例的示意图。图4是示出操作者弯曲了右手H的手指的状态的一例的示意图。如图3和图4所示,操作者使手的掌侧放置于装置主体32。如图3所示,在装置主体32设置有供操作者的右手H的5根手指(拇指F1、食指F2、中指F3、无名指F4、小指F5)分别接触的接触部40。在此,接触部40位于与装置主体32的外周面32a大致相同的位置,露出于外部。此外,在后面叙述接触部40的详细结构。
检测部50检测操作者的手指的运动。检测部50基于操作者的手指对于接触部40按压的按压状态来检测手指的运动。例如,检测部50在操作者弯曲手指来按压接触部40时,基于手指对于接触部40按压的按压状态来检测手指弯曲的姿势。手指的按压状态是包括手指按压接触部40的位置和按压的强度这两方的概念。例如基于手指对接触部40的按下量来检测手指的按压强度,但还可以通过其它的方法(例如,手指的按压位置处的静电容量的变化)来检测按压强度。
另外,检测部50通过检测5根手指各自的运动(还包括姿势),能够估计手整体的运动。例如,检测部50对操作者的5根手指从图3的状态弯曲成图4的状态这一情况进行检测。检测部50为了高精度地检测手指的运动,具有指节检测部52、位置检测部54以及左右运动检测部56,在后面叙述这些检测部的详细内容。
力觉产生部60产生与多指机器人10接触物体时的来自物体的反作用力相对应的力觉。另外,可以在多指机器人10被动地运动的情况下,力觉产生部60驱动接触部40使得操作者的手指成为对应的手指姿势。在后面叙述力觉产生部60的详细内容,力觉产生部60借助驱动部62使接触部40(具体地说,图5所示的转动构件45a~45f)进行动作,来向操作者的与接触部40接触的手指传递力觉。力觉是与人所具有的五感(视觉、听觉、触觉、味觉、嗅觉)中的触觉相关联的感觉,主要是指与物体接触时人感觉到的力量感。
例如,在使手指机构12弯曲以抓住物体的多指机器人10没有被进一步弯曲手指机构12的情况下,力觉产生部60产生力觉。由此,操作者能够通过由手指接受所产生的力觉,来识别正在远程操作的多指机器人10没有被进一步弯曲或正抓着的物体的柔软度等。
控制装置70基于运动检测装置30检测到的操作者的手的运动来控制多指机器人10的动作。即,与操作者的各手指的运动连动地,控制装置70使对应的手指机构12分别进行动作。此外,控制装置70可以与运动检测装置30共同为一个装置。
控制装置70使手指机构12进行动作使得与例如检测到的手指的姿势一致。例如,在通过运动检测装置30检测到操作者如图3所示那样弯曲右手的手指的情况下,控制装置70使多指机器人10(具体地说,模仿右手的机械手)弯曲。另外,控制装置70可以调整手指机构12的关节的角速度来使手指机构12进行动作,使得与操作者通过手指进行按压的按压大小一致。并且,控制装置70还可以以手指的运动(例如弯曲量)的规定倍率使多指机器人10进行动作。
<装置主体32的详细结构>
参照图5和图6来说明运动检测装置30的装置主体32的详细结构。
图5是用于说明装置主体32的结构的一例的示意图。图6是从后侧观察图5所示的装置主体32的示意图。此外,在图5中,为了方便说明,用圆(○)表示指节检测部52和左右运动检测部56的位置。
如图5所示,装置主体32具有球体部35。球体部35是操作者放置手并使手指进行运动的部分。在此,球体部35是球形状。但是,并不限定于此,球体部35还可以由包括椭圆体的一部分的形状形成,还可以由椭圆体的全部构成。通过设置成如此的球体部35的形状,从而操作者易于放置手并使其进行运动。此外,在图5和图6中虽未示出,但是还可以使为了设置球体部35而支承球体部35的支承部与球体部35连结。
如图5所示,球体部35具有形成于外周面的槽部37。槽部37以模仿操作者的手的形状的方式形成,操作者使手的掌侧放置在槽部37上(参照图3)。在槽部37设置有供操作者的5根手指分别接触的手指接触部41a~41f,来作为前述的接触部40。
手指接触部41a~41f是供操作者的手指(具体地说,手指的指腹)接触的部分。在此,操作者的拇指与手指接触部41a接触,食指与手指接触部41b接触,中指与手指接触部41c接触,无名指与手指接触部41d接触,小指与手指接触部41e接触。另外,以模仿操作者的5根手指的形状的方式形成手指接触部41a~41f。具体地说,手指接触部41a~41f的大小与对应的手指的大小成比例。由此,易于使操作者的5根手指分别与对应的手指接触部41a~41f接触。
手指接触部41a~41f中的供手指的指腹接触的区域朝向手指侧弯曲成凸状(参照图6)。换言之,手指接触部41a~41f分别以沿着对应的手指的形状的方式弯曲成凸状。此外,手指接触部41a~41f可以将多个面连接而弯曲成凸状。由此,操作者在没有不适感地将5根手指放置于手指接触部41a~41f的状态下,易于使5根手指进行运动。
如图5所示,手指接触部41a~41f具有能够根据手指的运动来转动的转动构件45a~45f。转动构件45a~45f被操作者的手指按压,从而绕轴部46a~46f转动。例如,当操作者弯曲手指来按压转动构件45a~45f时(参照图4),转动构件45a~45f以轴部46a~46f为中心朝向装置主体32的内侧转动。另一方面,当操作者伸展弯曲的手指时,转动构件45a~45f返回到转动前的状态(参照图3)。转动构件45a~45f的表面例如为规定曲率的曲面。
在上述中,接触部40具有根据手指的运动而转动的转动构件45,但并不限定于此。例如,接触部40可以具有根据手指的按压状态而弹性形变的弹性构件(例如橡胶构件)。在该情况下,无需用于使转动构件45转动的机构。
在手指接触部41a~41f分别设置有前述的检测部50。检测部50基于放置于手指接触部41a~41f的各手指的按压状态来检测各手指的运动。即,检测部50在操作者按压手指接触部41a~41f的转动构件45a~45f时,基于手指对于转动构件45a~45f按压的按压状态来检测手指的运动。例如,检测部50在操作者弯曲或伸展放置于转动构件45a~45f的手指时,检测手指的运动。
检测部50检测转动构件45a~45f的转动量。另外,如图1所示,检测部50包括指节检测部52、位置检测部54以及左右运动检测部56。通过如此设置多个检测部,即使操作者为了远程操作多指机器人10而使手指进行各种运动,也能够高精度地检测手指的运动。
指节检测部52被配置于与手指的指节(基节、中节以及末节中的至少一个指节)相对应的位置,检测该指节的状态。指节检测部52例如是在指节接触时进行检测的接触式的传感器、或者从远离的位置进行检测的非接触式的传感器。
指节检测部52分别配置于转动构件45a~45f。在此,指节检测部52被配置于与各手指的基节相对应的位置。(参照图5)例如,设置于转动构件45b的指节检测部52被配置在与操作者的食指的基节相对应的位置。
位置检测部54检测手指的指尖的位置。例如,在操作者弯曲手指时,位置检测部54检测弯曲的手指的指尖的位置。位置检测部54还被设置于转动构件45a~45f。位置检测部54例如包括设置于转动构件45a~45f的表面的触摸传感器(例如静电电容式),检测与触摸传感器接触的指尖的位置。
图7是用于说明指尖的位置的检测的示意图。在图7中,操作者弯曲食指,来使食指的指尖侧与转动构件45b接触。此时,位置检测部54检测弯曲状态的食指的指尖的位置或者食指在旋转构件45b上的滑行距离(移动距离)。
检测部50基于位置检测部54检测到的指尖的位置以及转动构件45a~45f的转动量来检测手指的运动。例如,如图7所示,在弯曲了食指的情况下,检测部50检测转动构件45b的转动量,并且通过位置检测部54来检测食指的指尖的位置,从而能够估计食指的弯曲状态(姿势)。在如此检测的情况下,即使不对于食指的3个指节分别设置指节检测部52,也能够恰当地检测食指的运动。
左右运动检测部56检测手指的左右方向中的至少一方的运动。左右运动检测部56例如被配置于槽部37中的供手指的侧表面接触的区域。具体地说,左右运动检测部56在槽部37中分别配置于转动构件45a~45f各自的两侧的侧壁。左右运动检测部56是通过手指的侧表面接触来进行检测的接触式的传感器、即使手指的侧表面不接触也进行检测的非接触式的传感器(例如测距传感器)。此外,可以在转动构件45a~45f的表面设置有触摸传感器的情况下,通过该触摸传感器来检测手指的左右方向的运动。
图8是用于说明手指的左右方向的运动的示意图。在图8中示出食指和中指向相互分开的方向(左右方向)扩开的状态。如图8所示,在食指和中指沿左右方向移动时,配置于手指接触部41b的左右运动检测部56对食指的左右方向上的位置进行检测,配置于手指接触部41c的左右运动检测部56检测中指的左右方向上的位置。由此,能够恰当地检测食指和中指的左右方向上的运动。
在上述中,指节检测部52被配置在与操作者的手指的基节相对应的位置,但并不限定于此。例如,指节检测部52还可以如图9所示那样进行配置。
图9是用于说明指节检测部52的配置状态的一例的示意图。可以在与手指的基节、中节及末节的各个指节对应的位置处配置有指节检测部52。由此,能够通过3个指节检测部52来检测手指的各指节的状态,因此能够精度良好地检测手指的运动。另外,可以在设置3个指节检测部52的情况下,不设置上述的位置检测部54。
另外,可以在与手指的基节、中节及末节中的2个指节相对应的位置处配置有指节检测部52。例如,可以在与手指的基节及末节相对应的位置处配置有指节检测部52。
在手指接触部41a~41f设置有驱动部62(图1),以产生前述的向手指传递的力觉。在多指机器人10与物体接触时,驱动部62使转动构件45a~45f旋转来向手指传递力觉。
图10是用于说明驱动部62的结构的一例的示意图。在图10中,示出使转动构件45a转动的驱动部62,是与使转动构件45b~45f转动的驱动部62相同的结构。在此,驱动部62是与转动构件45b的轴部46b连结的马达。驱动部62使转动构件45b向与食指F2按压转动构件45b的按压方向(第一方向)相反的方向(第二方向)转动。具体地说,如图10所示,驱动部62以轴部46b为中心使转动构件45b向顺时针方向转动,从而从转动构件45b向食指F2传递力觉。
此外,在上述中,设为驱动部62使转动构件45b向与按压方向相反的方向转动,但并不限定于此。例如,也可以是,驱动部62在使转动构件45b向与按压方向相反的方向转动并临时停止之后,再使转动构件45b向与按压方向相同的方向转动。作为一例,在多指机器人10弯曲手指机构12来握住蛋时,如果手指机构12接触到蛋,则驱动部62产生力觉,从而操作者使手指停止。之后,当操作者使手指向按压方向进一步按压时,多指机器人10驱动手指机构12来打破蛋。然后,因蛋被打破而导致手指机构12进一步朝向弯曲方向移动,但是为了向操作者反馈该移动后的位置,驱动部62使转动构件45b向按压方向转动。
图11是用于说明驱动部62的结构的变形例的示意图。在图11所示的变形例中,驱动部62不与转动构件45b的轴部46b连结,使配置于转动构件45b的下方的杆64移动。杆64例如向图11的箭头所示的方向(上方)移动,从而使转动构件45b以轴部46b为中心向顺时针方向进行转动。如此,驱动部62使杆64向上方移动,来使转动构件45b转动,从而从转动构件45b向食指F2传递力觉。
在上述中,作为感觉反馈而在接触部40的手指接触部41a~41f向操作者的手指传递力觉,但是并不限定于此。例如,接触部40可以向指尖提供振动、电刺激,来向手指提供粗糙感、粘腻感。另外,接触部40可以包括通过温度来向手指传递感觉的设备。
此外,在上述中,如图3所示,设为在装置主体32的外周面配置转动构件45a~45f以使操作者将手的掌侧放置于装置主体32并使手指运动,但并不限定于此。例如,也可以如图12所示,转动构件45a~45f配置于装置主体32的内部。
图12是用于说明变形例所涉及的装置主体32的结构的示意图。变形例所涉及的装置主体32具有操作者能够插入手指的插入孔部38。在此,插入孔部38是易于插入手的形状即可,例如是矩形形状。而且,转动构件45a~45f分别以能够转动的方式配置在插入孔部38中。因此,在变形例中,操作者从插入孔部38插入手,来使手指在装置主体32内相对于转动构件45a~45f进行运动。
在图12所示的变形例中,检测部50(图1)还检测装置主体32内的手指的运动(手指按压转动构件45a~45f的运动)。检测部50包括前述的指节检测部52、位置检测部54以及左右运动检测部56。由此,能够高精度地检测手指在装置主体32内的运动。
在上述中,设为使用被手指按压的转动构件45a~45f,但并不限定于此。例如,可以使用手指能够操作的指示设备操纵杆。在该情况下,将手指对指示设备操纵杆的押压力分配为多指机器人10(多关节机器人)的对应的关节的加速度、速度以及位移。
另外,在上述中,设为多指机器人10是以模仿人的手的方式形成的机械手,但并不限定于此。例如,多指机器人10可以是以模仿人的双脚的方式形成的机器人。此时,也可以是,在检测部50检测到手的食指的运动的情况下,控制装置70使多指机器人10的单只脚(在此为左脚)进行动作,在检测部50检测到中指的运动的情况下,使多指机器人10的另一只脚(右脚)进行动作。
<本实施方式的效果>
上述的本实施方式的运动检测装置30具有:装置主体32,其被放置操作者的手指;接触部40,其以模仿手指的形状的方式形成于装置主体32,供手指接触;以及检测部50,其基于手指对于接触部40按压的按压状态来检测手指的运动。
通过上述的结构,操作者能够通过使放置于装置主体32的手指运动,来远程操作多指机器人10。因此,与以往的将手套佩戴于手的方式相比,佩戴简便,并且装置主体32的耐久性也优异。另外,检测部50基于手指对于以模仿手指的形状的方式形成的接触部40按压的按压状态来检测手指的运动,从而能够高精度地检测手指的细微的运动等。其结果,能够实现多指机器人10的细微的动作。
以上,使用实施方式说明了本发明,但本发明的保护范围并不限定于上述实施方式所记载的范围,在其宗旨的范围内能够进行各种的变形和变更。例如,装置的分拆、合并的具体实施方式不限于以上的实施方式,能够对于其全部或者一部分以任意单位功能性或者物理性地分拆、合并来构成。另外,通过多个实施方式的任意组合而产生的新实施方式也包含于本发明的实施方式。通过组合而产生的新实施方式的效果一并具有原实施方式的效果。
10:多指机器人;12:手指机构;30:运动检测装置;32:装置主体;35:球体部;37:槽部;38:插入孔部;40:接触部;41a~41f:手指接触部;45a~45f:转动构件;46a~46f:轴部;50:检测部;52:指节检测部;54:位置检测部;56:左右运动检测部;60:力觉产生部;62:驱动部。