多关节机器人用示教数据创建方法和示教数据校正用坐标系检测器
文献发布时间:2023-06-19 09:23:00
技术领域
本发明涉及一种示教数据创建方法、以及示教数据校正用坐标系检测器,该示教数据创建方法在例如汽车生产线中,可以使对载置于夹具上的部件进行操作的多关节机器人执行安装在该多关节机器人的臂前端上的工具的动作轨迹,该示教数据校正用坐标系检测器用于在通过信息处理系统在虚拟空间内创建示教数据时,从现场获得考虑与设备的设计值的偏差而校正示教数据时使用的坐标系数据。
背景技术
以往,在汽车等的生产线上,大量多关节机器人代替人工进行操作。而且,这些多关节机器人根据预先创建好的示教数据再现安装在臂前端的工具的动作。近年来,首先在离线操作中基于使用工作站或计算机等信息处理系统3D显示的数据研究机器人的姿势同时创建该示教数据,然后将创建的示教数据写入并用于设置在生产线上的机器人的控制部。
但是,如果如上所述在离线操作中创建的示教数据直接写入现场安装的机器人的控制部,则由于安装在生产线上的机器人或夹具的安装位置的偏差等,机器人有可能在动作时接触夹具等被操作物。
为了避免此情况,例如在专利文献1中记载了:考虑到生产线中的机器人和被操作物的安装位置的偏差,对信息处理系统中的机器人与由该机器人操作的被操作物之间的位置关系的偏差进行校正。具体而言,在生产线现场,具有作为基准的坐标系创建用目标的第一基准器具(固定式枪)安装在被操作物上,而第二基准器具安装在机器人的臂前端,然后,操作机器人使第二基准器具靠近或接触坐标系创建目标,从该坐标系创建用目标的坐标位置获取实际坐标系数据。另一方面,在信息处理系统中,使用虚拟模型根据被操作物的坐标系创建用目标的设计坐标位置获取设计坐标系数据。然后,将实际坐标系数据导入信息处理系统中,并且移动上述被操作物的坐标位置使得设计坐标系数据与实际坐标系数据一致。由此,在信息处理系统中,机器人与被操作物之间的相对位置关系和实际生产线机器人与被操作物之间的相对位置关系相符。
现有技术文献
专利文献
专利文献1:日本特开2000-288742号公报
发明内容
-发明所要解决的问题-
但是,如专利文献1所示,如果在信息处理系统中使被操作物的坐标位置移动,则在多个机器人对一个被操作物进行操作的工序的情况下,各个机器人均会产生机器人与被操作物的相对位置关系的偏差,因此除了与被操作物之间的相对位置关系的偏差被校正的机器人以外,其他机器人与被操作物之间都会产生很大偏差,如果将由除了与被操作物之间的相对位置关系的偏差被校正的机器人以外的机器人创建的示教数据写入现场安装的机器人的控制部中,则机器人在工作中很可能会与被操作物接触。
另外,现场安装的各机器人和安装在各机器人上的工具存在工具与机器人之间的组装误差和机器人的安装误差,进而还有机器人和工具自身存在的机械差异(machinedifference)等,对于怎样解决这些误差对示教数据的影响,在专利文献1中没有任何记载。
本发明是鉴于上述各点而完成的,其目的在于,即使在由多个机器人操作一个被操作物的情况下,也能在信息处理系统中创建考虑了现场设置的设备的偏差的多关节机器人用示教数据。
-用于解决问题的方案-
为了实现上述目的,本发明的特征在于,在信息处理系统中对机器人的臂前端处的工具的动作轨迹进行校正。
具体而言,本发明以一种创建示教数据的多关节机器人用示教数据创建方法为对象,所述示教数据可以在配置有一个以上多关节机器人和该机器人进行操作的被操作物的设备中,使所述机器人执行安装在所述机器人的臂前端的工具对所述被操作物进行操作时的动作轨迹,进而采用了如下技术方案。
即,在第一方面的发明中,其特征在于,经过以下工序:
坐标系数据获取工序:在将具有作为基准位置的坐标系创建用目标的第一基准器具安装在所述被操作物上并将第二基准器具安装在所述工具上之后,根据操作所述机器人靠近或接触所述坐标系创建用目标的所述第二基准器具的坐标位置,获取第一坐标系数据;
校正前示教数据获取工序:在信息处理系统中,再现所述设备的虚拟模型并使用该虚拟模型分别获取所述动作轨迹的模拟示教数据和基于所述坐标系创建用目标的设计坐标位置的设计坐标系数据,或者,将已经在与所述设备结构相同的其他设备中获取的所述动作轨迹的已获取示教数据、以及在所述其他设备中的被操作物的基准位置处使用所述第一基准器具和第二基准器具获取的第二坐标系数据导入所述信息处理系统中;
示教数据校正工序:将所述第一坐标系数据导入所述信息处理系统中之后,移动所述模拟示教数据的坐标位置使得所述设计坐标系数据与所述第一坐标系数据一致,或者,移动所述已获取示教数据的坐标位置使得所述第二坐标系数据与所述第一坐标系数据一致;
对所述模拟示教数据或所述已获取示教数据进行校正以获得最终示教数据。
第二方面的发明是,在第一方面的发明中,其特征在于,所述第一基准器具隔开规定间隔具有多个所述坐标系创建用目标,所述模拟示教数据或所述已获取示教数据成为被划分为多个区域的区域数据,通过分别使用位置最近的所述坐标系创建用目标校正该各区域数据以获取所述最终示教数据。
另外,还以一种示教数据校正用坐标系检测器为对象,该示教数据校正用坐标系检测器在进行第一方面的发明的多关节机器人用示教数据创建方法时使用,并且可拆卸地安装在配置有所述被操作物的设备上,所述被操作物具有安装于所述机器人的臂前端的工具所操作的夹具和可替换地支撑该夹具的支撑体,所述示教数据校正用坐标系检测器用于在通过所述信息处理系统在虚拟空间中创建所述示教数据时,从所述设备获得所述第一坐标系数据或第二坐标系数据,进而采用了如下技术方案。
即,在第三方面的发明中,其特征在于,所述示教数据校正用坐标系检测器包括:第一基准器具,其具有坐标系创建用目标,所述坐标系创建用目标包括隔开规定间隔设置的第一标记部、第二标记部和第三标记部,将所述夹具从所述支撑体上拆下时,使用对所述支撑体可定位地安装所述夹具的安装单元将所述第一基准器具固定在所述支撑体上;以及第二基准器具,其构成为可拆卸地安装在所述工具上,具有可以通过所述臂的动作使所述工具移动并分别靠近或接触所述第一标记部、第二标记部和第三标记部的前端部。
第四方面的发明是,在第三方面的发明中,其特征在于,所述第一标记部呈锤状,具有尖端处为标记的尖锐的第一顶部;所述第二标记部呈截面三角形,具有尖端处为标记的直线状的第二顶部;所述第三标记部呈截面三角形,具有尖端处为标记的直线状的第三顶部。
第五方面的发明是,在第三方面的发明中,其特征在于,所述第一基准器具包括使用所述安装单元固定在所述支撑体上的基架,在该基架上隔开规定间隔设置有多个所述坐标系创建用目标。
第六方面的发明是,在第三方面的发明中,其特征在于,所述安装单元设置在所述支撑体的多个位置上。
-发明的效果-
在第一方面的发明中,通过使各示教数据相对于被操作物移动以校正信息处理系统中对每个机器人创建的示教数据与被操作物的相对位置关系,因此即使在工序中存在一个以上对被操作物进行操作的机器人的情况下,也能够在信息处理系统中创建预先考虑了现场存在的各机器人与被操作物的相对偏差的示教数据。另外,由于是校正工具的动作轨迹而不是校正工具或机器人本身的位置,因此对于将在信息处理系统中创建的示教数据写入现场安装的机器人的控制部中执行时的机器人的动作,现场的工具与机器人主体之间的组装误差和机器人主体的安装误差的偏差造成的影响很小。因此,可以减少由于现场安装的各机器人的设计值的误差而导致的示教数据的现场修正。
在第二方面的发明中,由于在靠近各坐标系创建用目标的每个区域校正示教数据,因此可以减少在靠近用于校正的坐标系创建用目标的区域内工具的动作和远离该坐标系创建用目标的区域内工具的动作中由于机器人的机械差异而产生的偏差对最终示教数据造成的影响。
在第三方面的发明中,可以通过使安装在工具上的第二基准器具靠近或接触通过安装单元安装在支撑体上的坐标系创建用目标的第一标记部、第二标记部和第三标记部以检测坐标系创建用目标的坐标位置,获得实际坐标系数据。另外,由于可以利用对支撑体更换夹具时使用的安装单元将作为基准的器具安装在设备上,因此可以不增加部件数量以免提高成本。进而,由于利用对支撑体精确地定位夹具的安装单元将作为基准的器具安装在设备上,因此可以精确地将该作为基准的器具定位在设备上。
在第四方面的发明中,使第二基准器具的前端部分别靠近或接触第一标记部、第二标记部和第三标记部时,操作者更容易在视觉上使第二基准器具的前端部分别靠近或接触第一标记部、第二标记部和第三标记部。因此,可以有效地进行获取用于创建坐标系数据的坐标位置的操作。
在第五方面的发明中,由于可以在多个位置形成用于校正的坐标系数据,因此可以采用使用最佳位置的坐标系创建用目标创建的坐标系数据作为校正示教数据时使用的坐标系数据,例如,可以对靠近各坐标系创建用目标的每个区域校正示教数据,减少在靠近用于校正的坐标系创建用目标的区域内工具的动作与远离该坐标系创建用目标的区域内工具的动作中由于机器人的机械差异而产生的偏差对校正后示教数据造成的影响。
在第六方面的发明中,在针对多个位置设置有夹具的设备中的各夹具创建示教数据的情况下,仅准备一个检测器即可,因此可以减少部件数量以免提高成本。
附图说明
图1是配置了垂直多关节机器人的焊接生产线(welding line)的示意性前视图,该垂直多关节机器人基于由本发明的实施方式涉及的示教数据创建方法创建的示教数据再现动作。
图2是对应于图1的从II箭头方向截取的图。
图3是图2的局部放大图,示出操作安装在机器人的臂前端的焊枪时的动作轨迹。
图4是从下方观察可拆卸地安装在工件定位装置上的夹具的图。
图5是示出更换夹具时在夹具中央下部,将夹具定位在支撑框上之前的状态的平面示意图。
图6是从图5中VI箭头方向截取的图。
图7是示出更换夹具时在夹具中央下部,将夹具定位在支撑框上之后的状态的平面示意图。
图8是从图7中VIII箭头方向截取的图。
图9是示出更换夹具时在夹具的长度方向端部,将夹具定位在支撑框上之前的状态的平面示意图。
图10是从图9中X箭头方向截取的图。
图11是示出更换夹具时在夹具的长度方向端部,将夹具定位在支撑框上之后的状态的平面示意图。
图12是从图11中XII箭头方向截取的图。
图13是从图2中XIII箭头方向截取的图,示出将夹具固定在支撑框上之前的状态。
图14是示出在图13之后,将夹具固定在支撑框上之后的状态的图。
图15是从图2中箭头方向截取的图,示出将夹具固定在支撑框上之前的状态。
图16是示出在图15之后,将夹具固定在支撑框上之后的状态的图。
图17是示出本发明的实施方式涉及的第一基准器具的立体图。
图18是从下方观察第一基准器具的图。
图19是与图2相对应,示出操作机器人获取现场设备的实际坐标系数据的状态的图。
图20是从图17中XX箭头方向截取的图。
图21是从图17中XXI箭头方向截取的图。
图22是从图17中XXII箭头方向截取的图。
图23是示出本发明的实施方式涉及的第二基准器具的立体图。
图24是在本发明的实施方式中使用的信息处理系统的结构示意图。
图25是示出本发明的实施方式涉及的示教数据的创建方法的步骤的框图。
图26是显示在信息处理系统的显示部中的第一基准器具的立体图,示出了对在信息处理系统中创建的模拟示教数据的一部分区域进行校正之前的状态。
图27是示出在图26之后,获得最终示教数据的一部分区域之后的状态的图。
图28是示出在图27之后,对模拟示教数据的一部分区域进行校正获得最终示教数据之前的状态的图。
图29是示出在图28之后,得到最终示教数据之后的状态的图。
具体实施方式
以下,根据附图对本发明的实施方式进行详细说明。应予说明,以下优选实施方式的说明本质上仅为示例。
图1和图2示出本发明的实施方式涉及的生产线P1。该生产线P1通过点焊将压制成形的两个工件W1、W2组装成一体。在生产线P1上设置有生产设备E1,该生产设备E1包括:进行工件W1、W2的定位的工件定位装置2(被操作物)、以及进行焊接操作的一对垂直多关节机器人3,机器人3对工件定位装置2进行操作,另一方面,在工件定位装置2的与机器人3相反的一侧,操作者H1将工件W1、W2放置到工件定位装置2上。
工件定位装置2包括:中央具有沿上下方向延伸的旋转轴4,俯视呈网格状的旋转框4(支撑体);以及将工件W1、W2定位的四个夹具5。旋转框4在与机器人3相对应的位置(以下称为工件焊接区域X1)和与操作者H1相对应的位置(以下称为工件放置区域X2)之间交替进行R1方向的旋转(正转)和R2方向的旋转(逆转)。
旋转框4包括:第一水平框41,其夹着旋转轴4a对称地从该旋转轴4a沿水平方向两侧延伸;一对第二水平框42,其夹着该第一水平框41对称地从该第一水平框41的长度方向两端分别沿与该第一水平框41正交的水平方向延伸;以及一对支撑框43,其将该各第二水平框42的长度方向一端之间与各第二水平框42的长度方向另一端之间分别桥接,并且上下分别可拆卸地支撑一个夹具5。
两个第二水平框42支撑各支撑框43,使得各支撑框43可绕各支撑框43的中心轴旋转,各支撑框43可以通过旋转动作交替切换安装在该各支撑框43上的各夹具5的上下位置。
各支撑框43截面呈矩形,在其长度方向中央的上表面和下表面分别设置有第一夹具固定部45。
如图5至图8所示,位于各支撑框43的上表面的第一夹具固定部45包括:第一凸块(block)45a,其位于第一水平框41侧;以及一对第二凸块45b,其在该第一凸块45a的与第一水平框41相反的一侧与第一凸块45a隔开规定间隔设置,并且沿支撑框43的长度方向彼此隔开规定间隔。
在第一凸块45a的中央形成有固定孔45c,该固定孔45c在沿着与支撑框43的长度方向正交的水平方向上贯通,分别在第一水平框41侧及其相反侧开口。
在第二凸块45b之间,由两个第二凸块45b的相对部分和支撑框43的上表面形成有卡合凹条部45d,该卡合凹条部45d在与支撑框43正交的水平方向上延伸,其两端部分分别开放。
卡合凹条部45d包括:沿着与支撑框43的长度方向正交的水平方向延伸的狭缝状的开口部45e、以及与该开口部45e连续地沿着支撑框43的长度方向扩张的宽阔部45f,卡合凹条部45d的截面形状呈近似T字形。
应予说明,位于各支撑框43的下表面的第一夹具固定部45从各支撑框43的旋转轴心方向观察,与位于各支撑框43的上表面的第一夹具固定部45点对称配置,因此详细说明省略。
在各支撑框43的靠近长度方向两端的上表面和下表面,分别设置有第二夹具固定部46,各支撑框43的长度方向一端侧的两个第二夹具固定部46和各支撑框43的长度方向另一端侧的两个第二夹具固定部46,分别位于与第一夹具固定部45等间隔的位置。
如图9至图12所示,位于各支撑框43的上表面的第二夹具固定部46呈块状并位于第一水平框41侧,在该第二夹具固定部46的中央形成有固定辅助孔46a,该固定辅助孔46a在与上述支撑框43的长度方向正交的水平方向上贯通,分别在第一水平框41侧及其相反侧开口。
应予说明,从各支撑框43的旋转轴心方向观察,位于各支撑框43的下表面的第二夹具固定部46与位于各支撑框43的上表面的第二夹具固定部46点对称配置,因此详细说明省略。
如图13和图14所示,在各支撑框43的靠近长度方向一端的两个侧面上设置有一对用于将夹具5固定在支撑框43上的第一固定单元47。
该第一固定单元47包括:沿着支撑框43的长度方向延伸的单元主体47a、以及可以朝着支撑框43的长度方向外侧进退的第一卡合销47b。
另一方面,如图15和图16所示,在各支撑框43的靠近长度方向另一端的两个侧面上设置有一对用于将夹具5固定在支撑框43上的第二固定单元48。
该第二固定单元48包括:固定在支撑框43上的块状的固定座48a;固定在支撑框43上与固定座48a相邻,沿着支撑框43的长度方向延伸的滑轨48b;可滑动地嵌合在该滑轨48b上的滑板48c;以及安装在固定座48a上的流体压力缸(fluid pressure cylinder)48d。该流体压力缸48d的活塞杆48e在支撑框43的长度方向上伸缩,并且其前端经由连结部件48f与滑板48c连接。
在滑板48c的与固定座48a相反侧的端部安装有矩形板49,在该矩形板49的与固定座48a相反侧的面上并设有第二卡合销48g和与旋转框4侧的布线连接的矩形板状的第一连接件(first connector)48h。
此外,当流体压力缸48d的活塞杆48e伸缩时,第二卡合销48g和第一连接件48h通过滑板48c的滑动动作在支撑框43的长度方向上进退。
即,两个第一卡合销47b和两个第二卡合销48g在水平方向上隔开规定间隔分离设置,第一夹具固定部45位于两个第一卡合销47b与两个第二卡合销48g之间的中央处。
如图1至图4所示,夹具5包括:沿着水平方向延伸,向下方开口的截面呈U字形的铝合金制主体框51;以及固定在该主体框51的上表面,沿着该主体框51延伸的板状的铁制支撑座52。在该支撑座52上安装有用于握持上述工件W1、W2的重叠部分的多个握持具52a。
如图4至图8所示,在主体框51的长度方向中央下部,安装有沿着与主体框51正交的水平方向延伸的固定框54。
该固定框54的形状形成为:俯视均呈T字形的突出部55和卡合部56通过沿着与主体框51正交的水平方向延伸的直线状的连结部57相连结。
突出部55包括:突出爪55a,其沿着与主体框51正交的水平方向突出以从该主体框51伸出,并且可卡合/脱离地卡合在固定孔45c上;以及一对前侧伸出部55b,其从该突出爪55a的基端侧向水平方向两侧伸出。
突出部55的突出长度设计为小于第一凸块45a和两个第二凸块45b之间的长度。
连结部57的与主体框51正交的水平方向的长度设定为大于两个第二凸块45b的与主体框51正交的水平方向的长度,连结部57在主体框51的长度方向上的长度设定为小于两个第二凸块45b之间的长度。
卡合部56包括:卡合爪56a,其在突出部55的突出方向的相反侧隔开规定间隔设置,沿着与突出爪55a相同的方向突出的卡合爪56a;以及一对后侧伸出部56b,其从该卡合爪56a的基端侧向水平方向两侧伸出。
卡合爪56a的宽度尺寸大于连结部57的宽度尺寸。
如图4所示,在主体框51的长度方向一端侧和另一端侧设置有沿着与主体框51正交的水平方向延伸的一对固定辅助框53。
如图9至图12所示,该固定辅助框53呈细长的板状,在固定辅助框53上主体框51的长度方向内侧,设置有沿着与突出爪55a相同的方向突出并且可卡合/脱离固定辅助孔46a的固定辅助爪53a。
此外,当夹具5配置在支撑框43的上方以使夹具5的固定框54的连结部57与卡合凹条部45d的开口部45e相对应,并且使夹具5下降时,如图5至图8所示,连结部57穿过开口部45e。
另外,在连结部57穿过开口部45e的状态下,使夹具5沿着突出部55的突出方向移动时,突出爪55a嵌插在固定孔45c内,并且卡合爪56a卡合在卡合凹条部45d的宽阔部45f上,沿着支撑框43的长度方向对夹具5相对于支撑框43的位置进行定位。
进而,当突出爪55a卡合在固定孔45c上时,各固定辅助爪53a也嵌插在各固定辅助孔46a内。
在主体框51的长度方向两端,安装有与支撑框43的两个相邻的外周面相对应的一对L形框59。
如图13和图14所示,在一个L形框59的向下方突出的部分,设置有在主体框51的长度方向内侧开口的第一卡合孔59a,该第一卡合孔59a在第一卡合销47b前进的状态下与第一卡合销47b卡合。
另外,如图15和图16所示,在另一个L形框59的向下方突出的部分,设置有在主体框51的长度方向内侧开口的第二卡合孔59b,该第二卡合孔59b在第二卡合销48g前进的状态下与第二卡合销48g卡合。
第一卡合孔59a和第二卡合孔59b位于距离固定孔45c相同的位置。
另外,在另一个L形框59的向下方突出的部分,与夹具5侧的布线相连的呈矩形凹陷的第二连接件59c与第二卡合孔59b并设,第二连接件59c可以与第一连接件48h连接。
此外,各支撑框43的第一夹具固定部45、第二夹具固定部46、第一固定单元47和第二固定单元48构成本发明的安装单元40,当处于突出爪55a嵌插在固定孔45c中的状态时,第一卡合销47b和第二卡合销48g位于与第一卡合孔59a和第二卡合孔59b相对应的位置处,通过使第一卡合销47b和第二卡合销48g分别前进而与第一卡合孔59a和第二卡合孔59b卡合,从而将夹具5安装在支撑框43上,另一方面,通过使第一卡合销47b和第二卡合销48g分别后退而离开第一卡合孔59a和第二卡合孔59b,从而将夹具5从支撑框43上拆除。
另外,第一连接件48h前进时与第二连接件59c卡合,支撑框43侧的布线与夹具5侧的布线连接。
机器人3在臂3a的前端安装有焊枪6(工具),可以自由地改变该焊枪6的姿势进行焊接。
在生产设备E1中,可以安装示教数据校正用坐标系检测器1。
该检测器1用于在由信息处理系统11在虚拟空间内创建机器人3用示教数据10时,获取考虑与生产设备E1的设计值的偏差进行校正时使用的实际坐标系数据12(第一坐标系数据),检测器1具备坐标系创建用单元7(第一基准器具)。
如图17至图19所示,该坐标系创建用单元7包括沿着水平方向延伸并向下方开放的截面近似U字形的基架71,该基架71可以载置于支撑框43的上表面。
在基架71的长度方向中央下部安装有固定框54,该固定框54与安装在主体框51上的固定框结构相同。
另外,在基架71的长度方向一端侧和另一端侧,安装有一对固定辅助框53,该固定辅助框53与安装在主体框51上的固定辅助框结构相同。
基架71上的固定框54和两个固定辅助框53位于与支撑框43上的固定孔45c和两个固定辅助孔46a分别对应的位置,坐标系创建用单元7可以与夹具5同样地固定在支撑框43上。应予说明,由于固定孔45c和两个固定辅助孔46a的位置关系在各支撑框43处均相同,因此坐标系创建用单元7可以安装到任意支撑框43上。
在基架71的两端固定有呈近似L字形的一对被卡合板72。
在一个被卡合板72的向下方突出的部分形成有第一安装孔72a,该第一安装孔72a在基架71载置于支撑框43上的状态下与第一固定单元47的第一卡合销47b相对应,当第一固定单元47的第一卡合销47b前进时,该第一卡合销47b与第一安装孔72a卡合,坐标系创建用单元7的一侧固定在支撑框43上。
另外,在另一个被卡合板72的向下方突出的部分形成有第二安装孔72b和第三安装孔72c,该第二安装孔72b和第三安装孔72c在基架71载置于支撑框43上的状态下,分别与第二固定单元48的第二卡合销48g和第一连接件48h相对应,当第二固定单元48的第二卡合销48g和第一连接件48h前进时,该第二卡合销48g和第一连接件48h分别与第二安装孔72b和第三安装孔72c卡合,使得坐标系创建用单元7的另一侧固定在支撑框43上。
即,各支撑框43以可更换地支撑夹具5,并且还可以支撑坐标系创建用单元7。
在基架71的上表面,在基架71的长度方向上隔开规定间隔等间隔地设置有向上方延伸的三个第一安装框73。
另外,在基架71的机器人3侧的侧面上,在基架71的长度方向上隔开规定间隔设置有向斜上方延伸的两个第二安装框74,各第二安装框74分别位于三个第一安装框73的两端处的两个第一安装框73的外侧。
在各第一安装框73和各第二安装框74的上端分别设置有坐标系创建用目标75。
该坐标系创建用目标75包括:设置在机器人3侧,沿着基架71的长度方向彼此向相反侧延伸的第一分支部75a和第二分支部75b;以及设置在比该第一分支部75a和第二分支部75b更远离机器人3的一侧,沿着与第一分支部75a相同的方向延伸的第三分支部75c。第一分支部75a、第二分支部75b和第三分支部75c位于隔开规定间隔的位置。
在第一分支部75a、第二分支部75b和第三分支部75c的延出端侧下表面,分别安装有近似矩形板状的第一标记部76、第二标记部77和第三标记部78。
如图20所示,在第一标记部76的下表面,设置有尖端处为标记的尖锐的第一顶部76a,该第一顶部76a呈随着向下方前进而逐渐缩径的角锥面平缓的四角锥状。
如图21所示,在第二标记部77的下表面,设置有尖端处为标记的直线状的第二顶部77a,该第二顶部77a呈在基架71的长度方向上的宽度随着向下方前进而逐渐缩窄的倾斜面平缓的截面三角形状。
如图22所示,在第三标记部78的下表面,设置有尖端处为标记的直线状的第三顶部78a,该第三顶部78a呈随着向下方前进在与基架71的长度方向交差的水平方向上的宽度左窄的具有平缓倾斜面的截面三角形状。
第一标记部76的第一顶部76a、第二标记部77的第二顶部77a、以及第三标记部78的第三顶部78a确保位于同一平面上。
此外,坐标系创建用单元7构成为:当处于突出爪55a嵌插在固定孔45c内的状态时,第一卡合销47b、第二卡合销48g和第一连接件48h分别位于与第一安装孔72a、第二安装孔72b和第三安装孔72c相对应的位置处。通过使第一卡合销47b、第二卡合销48g和第一连接件48h分别前进并与第一安装孔72a、第二安装孔72b和第三安装孔72c分别卡合,将坐标系创建用单元7安装在支撑框43上,另一方面,通过使第一卡合销47b、第二卡合销48g和第一连接件48h分别后退而离开第一安装孔72a、第二安装孔72b和第三安装孔72c,将坐标系创建用单元7从支撑框43上拆除。
即,当将夹具5从支撑框43上拆除时,通过使用安装单元40将坐标系创建用单元7固定在支撑框43上。
在焊枪6的柄前端可以拆卸地安装有坐标系创建用工具8(第二基准器具)。
如图23所示,坐标系创建用工具8包括:俯视呈近似椭圆形板状的工具主体部81、以及从该工具主体部81的上表面中央部分向上方呈圆盘状伸出的上方伸出部82,在该上方伸出部82的中央向上方突设有前端尖锐的销83(前端部)。
如图1所示,在工件定位装置2和机器人3上连接有控制板9。
该控制板9具有:切换各夹具5的位置的夹具切换控制部9a、能够存储两个机器人3使用的示教数据10(最终示教数据)的数据存储部9b、以及能够演算实际坐标系数据12的数据演算部9c,可以使机器人3根据示教数据10执行对各焊枪6的夹具5进行操作时的动作轨迹。
夹具切换控制部9a向未图示的驱动电动机输出操作信号以使旋转框4围绕旋转轴4a旋转,使得各夹具5在工件焊接区域X1和工件放置区域X2之间交替移动。
另外,夹具切换控制部9a向未图示的驱动电动机输出操作信号以使支撑框43旋转,使得安装在各支撑框43上的两个夹具5分别移动至上侧位置和下侧位置。
如图3所示,存储在数据存储部9b中的示教数据10包括第一区域数据20和第二区域数据30。第一区域数据20是:夹具5的长度方向一侧区域中的一个机器人3的焊枪6在操作时的动作轨迹。第二区域数据30是:夹具5的长度方向另一侧区域中的另一个机器人3的焊枪6在操作时的动作轨迹。
应予说明,数据存储部9b存储分别与四个夹具5相对应的第一区域数据20和第二区域数据30。
另外,数据存储部9b分别存储:在坐标系创建用单元7安装于工件定位装置2上并且坐标系创建用工具8安装在焊枪6下侧的柄前端的状态下,操作机器人3的臂3a使坐标系创建用工具8的销83前端分别靠近或接触第一标记部76的第一顶部76a、第二标记部77的第二顶部77a和第三标记部78的第三顶部78a时销83前端的坐标位置。在本发明的实施方式的情况下,数据存储部9b使坐标系创建用工具8的销83前端分别靠近或接触位于坐标系创建用单元7的长度方向一侧的上侧的坐标系创建用目标75的第一标记部76的第一顶部76a、第二标记部77的第二顶部77a和第三标记部78的第三顶部78a,并且存储它们的坐标位置;另一方面,数据存储部9b使坐标系创建用工具8的销83前端分别靠近或接触位于坐标系创建用单元7的长度方向另一侧的上侧的坐标系创建用目标75的第一标记部76的第一顶部76a、第二标记部77的第二顶部77a和第三标记部78的第三顶部78a,并且存储它们的坐标位置。
如图19所示,数据演算部9c根据数据存储部9b中存储的销83前端相对于第一标记部76、第二标记部77和第三标记部78的坐标位置演算上述实际坐标系数据12。应予说明,在本发明的实施方式中,为方便起见,将从位于坐标系创建用单元7的长度方向一侧的上侧的坐标系创建用目标75获得的实际坐标系数据12称为实际坐标系数据12A,将从位于坐标系创建用单元7的长度方向另一侧的上侧的坐标系创建用目标75获得的实际坐标系数据12称为实际坐标系数据12B。
如图24所示,使用信息处理系统11通过离线操作创建示教数据10,该信息处理系统11包括显示部11a、操作部11b、存储部11c和演算部11d。
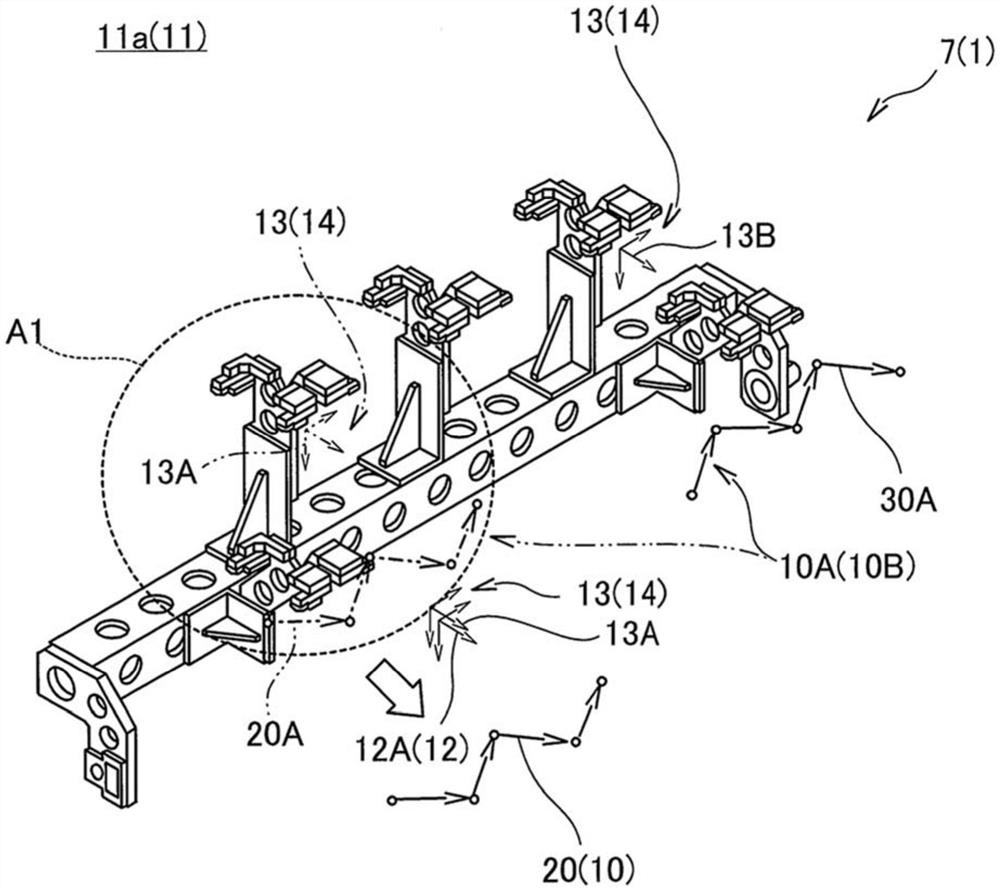
例如,如图26至图29所示,显示部11a可以显示工件定位装置2等的虚拟模型。应予说明,在图26至图29中,显示部11a在仅显示了坐标系创建用单元7。另外,显示部11a中显示的虚拟模型的符号与实际装配在生产线P1中的物品的的符号相同。
操作部11b可以操作机器人3的虚拟模型,例如,操作者可以在三维虚拟空间中对操作部11b进行操作的同时指定作为焊枪6进行焊接的位置的多个示教点T
存储部11c可以存储工件定位装置2、机器人3、夹具5、焊枪6、坐标系创建用单元7和坐标系创建用工具8的虚拟模型,并且可以存储用于再现使焊枪6依次在各示教点Tn上移动的臂3a的动作的模拟示教数据10A。在本发明的实施方式中,如图26所示,存储部11c存储第一区域模拟数据20A和第二区域模拟数据30A。第一区域模拟数据20A是:夹具5的长度方向一侧区域中的一个机器人3的焊枪6在操作时的动作轨迹。第二区域模拟数据30A是:夹具5的长度方向另一侧区域中的另一个机器人3的焊枪6在操作时的动作轨迹。
另外,存储部11c导入并存储由控制板9获得的实际坐标系数据12。
演算部11d根据作为虚拟模型的工件定位装置2的第一标记部76、第二标记部77和第三标记部78的设计坐标位置演算设计坐标系数据13,并且将该设计坐标系数据13存储在存储部11c中。在本发明的实施方式的情况下,根据位于作为虚拟模型的坐标系创建用单元7的长度方向一侧的上侧的坐标系创建用目标75的第一标记部76、第二标记部77和第三标记部78的坐标位置,演算设计坐标系数据13(以下称为设计坐标系数据13A);并且根据位于作为虚拟模型的坐标系创建用单元7的长度方向另一侧的上侧的坐标系创建用目标75的第一标记部76、第二标记部77和第三标记部78的坐标位置,通过演算部11d演算设计坐标系数据13(以下称为设计坐标系数据13B)。
另外,演算部11d使用存储在存储部11c中的实际坐标系数据12、设计坐标系数据13和模拟示教数据10A,进行演算以移动模拟示教数据10A的坐标位置使得设计坐标系数据13与移动实际坐标系数据12一致,以获得最终的示教数据10。
具体而言,如图26和图27所示,第一区域模拟数据20A的坐标位置拟通过使用从位于最靠近该第一区域模拟数据20A的坐标系创建用单元7的长度方向一侧的上侧的坐标系创建用目标75获得的设计坐标系数据13A进行移动;第二区域模拟数据30A的坐标位置通过使用从位于最靠近该第二区域模拟数据30A的坐标系创建用单元7的长度方向另一侧的上侧的坐标系创建用目标75获得的设计坐标系数据13B进行移动。
即,将包围位于坐标系创建用单元7的长度方向一侧的上侧的坐标系创建用目标75的规定范围的空间设为区域A1时,模拟示教数据10A的位于区域A1的部分通过使用从区域A1内的坐标系创建用目标75获得的设计坐标系数据13A进行坐标位置的移动;将包围位于坐标系创建用单元7的长度方向另一侧的上侧的坐标系创建用目标75的规定范围的空间设为区域A2时,模拟示教数据10A的位于区域A2的部分通过使用从区域A2内的坐标系创建用目标75获得的设计坐标系数据13B进行坐标位置的移动。
此外,由信息处理系统11创建的示教数据10被从信息处理系统11写出并写入控制板9中,以用于机器人3的再现动作。
接着,对在信息处理系统11中创建示教数据10的方法进行详述。
应予说明,如图3所示,所创建的示教数据10包括第一区域数据20和第二区域数据30,该第一区域数据20是:一个机器人3的焊枪6在夹具5的长度方向一侧区域中朝向夹具5的长度方向一侧改变姿势,同时进行焊接的动作轨迹;该第二区域数据30是:另一个机器人3的焊枪6在夹具5的长度方向另一侧区域中朝向夹具5的长度方向另一侧改变姿势,同时进行焊接的动作轨迹。
如图25所示,示教数据10是经过以下工序S1~工序S4得到的。
坐标系数据获取工序S1:在生产线P1中获得实际坐标系数据12;
校正前示教数据获取工序S2:在信息处理系统11中使用虚拟模型获得模拟示教数据10A和设计坐标系数据13;
示教数据校正工序S3:在信息处理系统11中演算最终的示教数据10;
示教数据写出工序S4:从信息处理系统11中写出最终获得的示教数据10。
首先,在生产线P1中,将工件定位装置2的四个夹具5中的一个拆除,并在该部分安装坐标系创建用单元7。
接着,将坐标系创建用工具8安装在一侧机器人3的焊枪6下侧的柄前端。
然后,使坐标系创建用工具8的销83前端分别靠近或接触位于坐标系创建用单元7的长度方向一侧的上侧的坐标系创建用目标75的第一标记部76的第一顶部76a、第二标记部77的第二顶部77a和第三标记部78的第三顶部78a,将它们的坐标位置存储在数据存储部9b中。
随后,在数据演算部9c中,根据数据存储部9b中存储的各销83前端的坐标位置,演算实际坐标系数据12A。
接着,将坐标系创建用工具8从一侧机器人3的焊枪6上拆下,并将坐标系创建用工具8安装在另一侧机器人3的焊枪6下侧的柄前端。
然后,使坐标系创建用工具8的销83前端分别靠近或接触位于坐标系创建用单元7的长度方向另一侧的上侧的坐标系创建用目标75的第一标记部76的第一顶部76a、第二标记部77的第二顶部77a和第三标记部78的第三顶部78a,并且将它们的坐标位置存储在数据存储部9b中。
随后,在数据演算部9c中,根据数据存储部9b中存储的各销83前端的坐标位置,演算实际坐标系数据12B。
接着,操作者在信息处理系统11中,通过操作部11b对显示于显示部11a中的各机器人3的虚拟模型进行操作,在三维虚拟空间内分别创建第一区域模拟数据20A和第二区域模拟数据30A并存储于存储部11c中。
另外,根据导入信息处理系统11中的位于作为虚拟模型的坐标系创建用单元7的长度方向一侧的上侧的坐标系创建用目标75的第一标记部76、第二标记部77和第三标记部78的坐标位置,通过演算部11d演算设计坐标系数据13A并存储于存储部11c中。
进而,根据导入信息处理系统11中的位于作为虚拟模型的坐标系创建用单元7的长度方向另一侧的上侧的坐标系创建用目标75的第一标记部76、第二标记部77和第三标记部78的坐标位置,通过演算部11d演算设计坐标系数据13B并存储于存储部11c中。
此后,通过演算部11d,移动第一区域模拟数据20A的坐标位置以使设计坐标系数据13A与实际坐标系数据12A一致,获得第一区域数据20,并且移动第二区域模拟数据30A的坐标位置以使设计坐标系数据13B与实际坐标系数据12B一致,获得第二区域数据30。
此外,将所得的第一区域数据20和第二区域数据30从信息处理系统11中写出,并写入控制板9中,用于各机器人3的再现动作。
综上所述,根据本发明的实施方式,通过使第一区域模拟数据20A和第二区域模拟数据30A分别相对于工件定位装置2移动,以校正在信息处理系统11中对每个机器人3创建的第一区域模拟数据20A和第二区域模拟数据30A与工件定位装置2的相对位置关系,因此即使在工序中存在一个以上对工件定位装置2进行操作的机器人3的情况下,也能够在信息处理系统11中创建预先考虑了现场存在的各机器人3与工件定位装置2的相对偏差的示教数据10。
另外,由于是校正焊枪6的动作轨迹而不是校正焊枪6和机器人3本身的位置,因此对于将在信息处理系统11中创建的示教数据10写入现场安装的机器人3的控制板9中执行时机器人3的动作,现场的焊枪6与机器人3之间的组装误差和机器人3的安装误差的偏差造成的影响很小。因此,可以减少由于现场安装的各机器人3的设计值的误差而导致的示教数据10的现场修正。
进而,由于在靠近各坐标系创建用目标75的每个区域校正示教数据10,因此可以减少在靠近用于校正的坐标系创建用目标75的区域内焊枪6的动作和远离该坐标系创建用目标75的区域内焊枪6的动作中由于机器人3的机械差异而产生的偏差对示教数据10造成的影响。
另外,可以通过使安装在焊枪6上的坐标系创建用工具8靠近或接触通过安装单元40安装在支撑框43上的坐标系创建用目标75的第一标记部76、第二标记部77和第三标记部78以检测坐标系创建用目标75的坐标位置,获得实际坐标系数据12。
另外,由于可以利用对支撑框43更换夹具5时使用的安装单元40,将用于获取校正在信息处理系统11中创建的模拟示教数据10A时使用的实际坐标系数据12的坐标系创建用单元7固定在生产设备E1上,因此可以不增加部件数量以免提高成本。
进而,由于利用对支撑框43精确地定位夹具5的安装单元40将坐标系创建用单元7固定在生产设备E1上,因此可以精确地将该坐标系创建用单元7定位在生产设备E1上。
另外,使坐标系创建用工具8的销83分别靠近或接触第一标记部76、第二标记部77和第三标记部78时,操作者通过第一顶部76a、第二顶部77a和第三顶部78a更容易在视觉上使坐标系创建用工具8的销83分别靠近或接触。因此,可以有效地进行获取用于创建实际坐标系数据12的坐标位置的操作。
进而,由于在坐标系创建用单元7中设置有多个坐标系创建用目标75,因此可以在多个位置形成用于校正的实际坐标系数据12。因此,可以采用使用最佳位置的坐标系创建用目标75创建的坐标系数据作为校正模拟示教数据10A时使用的实际坐标系数据12,例如,可以对靠近各坐标系创建用目标75的每个区域校正示教数据10,减少在靠近用于校正的坐标系创建用目标75的区域内焊枪6的动作与远离该坐标系创建用目标75的区域内焊枪6的动作中由于机器人3的机械差异而产生的偏差对校正后示教数据10造成的影响。
此外,如本发明的实施方式所示,在工件定位装置2上设置有四个安装单元40,在工件定位装置2上可拆卸地安装有四个夹具5的情况下,仅准备一个检测器1即可创建各夹具5处的示教数据10,因此可以减少部件数量以免提高成本。
应予说明,在本发明的实施方式中,在校正前示教数据获取工序S2中,使用虚拟模型在信息处理系统11中获得模拟示教数据10A和设计坐标系数据13,但并不限于此,可以在信息处理系统11中导入已经在与上述生产线P1构造相同的其他生产线中获取的各机器人3的焊枪6的动作轨迹的已获取示教数据10B、以及使用坐标系创建用单元7和坐标系创建用工具8在其他生产线的工件定位装置2中获取的其他设备坐标系数据14;并且在示教数据校正工序S3中,可以移动已获取示教数据10B的坐标位置使得其他设备坐标系数据14与实际坐标系数据12一致以进行获得最终的示教数据10的演算。由此,无需在信息处理系统11中创建模拟示教数据10A,因此可以缩短开发期间。
另外,在本发明的实施方式中,各机器人3的焊枪6的动作轨迹分别由一个示教数据(第一区域数据20或第二区域数据30)构成,但并不限于此,例如,各机器人3的焊枪6的动作轨迹可以由包括多个区域数据的示教数据构成,各区域数据分别使用最近的坐标系创建用目标75进行校正。
另外,在本发明的实施方式中,对由两台机器人3操作工件定位装置2的情况进行了说明,但是在由一台机器人3操作工件定位装置2的情况下也可以适用本发明的方法,并且即使在由三台以上机器人3操作工件定位装置2的情况下也可以本发明的方法。
另外,本发明的实施方式的示教数据10是针对焊枪6安装在臂3a前端的机器人3的动作轨迹的示教数据,但是安装在机器人3的臂前端的工具也可以是焊枪6以外的工具。
应予说明,在本发明的实施方式中,在两个支撑框43上使用安装单元40将坐标系创建用单元7安装在安装有四个夹具5的部分的一个区域内,以获得实际坐标系数据12,但是也可以在两个支撑框43上使用安装单元40将坐标系创建用单元7安装在安装有四个夹具5的部分的其他三个区域内,以获得最终的实际坐标系数据12。
-产业上的可利用性-
本发明适合于示教数据创建方法和示教数据校正用坐标系检测器,该示教数据创建方法在例如汽车生产线中,可以使对载置于夹具上的部件进行操作的多关节机器人执行安装在该多关节机器人的臂前端上的工具的动作轨迹,该示教数据校正用坐标系检测器用于在通过信息处理系统在虚拟空间内创建示教数据时,从现场获得考虑与设备的设计值的偏差而校正示教数据时使用的坐标系数据。
-符号说明-
1:示教数据校正用坐标系检测器
2:工件定位装置(被操作物)
3:机器人
3a:臂
4:旋转框(支撑体)
5:夹具
6:焊枪(工具)
7:坐标系创建用单元(第一基准器具)
8:坐标系创建用工具(第二基准器具)
10:示教数据(最终示教数据)
10A:模拟示教数据
10B:已获取示教数据
11:信息处理系统
12:实际坐标系数据(第一坐标系数据)
13:设计坐标系数据
14:其他设备坐标系数据
20:第一区域数据
20A:第一区域模拟数据
30:第二区域数据
30A:第二区域模拟数据
40:安装单元
71:基架
75:坐标系创建用目标
76:第一标记部
76a:第一顶部
77:第二标记部
77a:第二顶部
78:第三标记部
78a:第三顶部
83:销(前端部)
E1:生产设备
S1:坐标系数据获取工序
S2:校正前示教数据获取工序
S3:示教数据校正工序。