一种用于电子商务产品质量抽检的包裹取料机械手及方法
文献发布时间:2023-06-19 09:24:30
技术领域
本发明属于电子商务产品质量抽检领域,尤其涉及一种用于电子商务产品质量抽检的包裹取料机械手及方法。
背景技术
本发明中所述的电子商务产品是指用于互联网销售并以纸箱包装的产品,纸箱长宽高均不超过0.5m,重量不超过10kg。随着电子商务行业的发展,电子商务产品的销售数量和种类也越来越大,出现不良产品的数量也越来越大,而电子商务产品由于买卖双方之间的地理距离较大,普遍存在售后较为困难的问题,所以电子商务产品的质量更应该要重视,否则会给卖家造成很大的售后压力,所以卖家,会对销量大的电子商务产品进行抽检,抽检合格率达到一定标准,才能投放市场,否则退回厂家。
现有的抽检方法,是先对从厂家到货的包裹(包括纸箱、产品、说明书、配件等)进行卸车,将包裹放置到托盘上形成多个堆垛,然后随机抽取几个堆垛,并用叉车运送到环形的输送带的一侧,准备进行检查。由一个工人将将堆垛上的包裹逐个摆放到输送带上,另有数个工人沿输送带分布,对输送带上的包裹进行检查,主要抽检包裹内的配件是否齐全、产品是否正常、说明书有无漏放等,根据包裹的抽检数量相应增减输送线上的抽检工人人数,检查到的包裹如果合格,重新打包放回输送线,反之另外存放,重新打包的包裹通过输送带传递到另一处,由另一处的工人取下并重新形成多个堆垛,统计抽检到的包裹的合格率。如果抽检的合格率达标,将到货的、除抽检到的不合格品除外的所有包裹入库,准备投放市场;如果抽检合格率不达标,将到货的所有包裹进行退货处理。
由于现有的抽检方法是通过人工的方式将包裹放到输送线上,也是通过人工的方式将包裹从输送线上取下,包裹进入和离开输送线需要两名工人操作,对工人的数量要求较高,导致抽检的人工成本较高。
市面上也存在一种捡拾装置,捡拾装置上设有吸盘式的机械手,捡拾装置可带动机械手水平以及上下移动,并可将机械手准确定位到堆垛上的各个包裹,并逐层挨个取下放到输送线上,反之也可以通过机械手将包裹从输送线上取下并自动码垛到托盘上重新形成堆垛。捡拾装置非常适合用于抽检环节中将包裹转移到输送线以及将输送线上的包裹重新形成堆垛,但是由于每种产品对应的包裹尺寸不一样,导致所用的机械手也不一样。比如抽检小尺寸包裹时,要用小尺寸的机械手,否则机械手的吸取范围超过包裹的顶面,将会吸取到相邻的包裹,导致相邻包裹发生位置偏移,位置发生偏移的包裹不能在后续被拾取装置定位到,无法被机械手取走,不能自动完成捡取工作;抽检对尺寸包裹时,如机械手尺寸过小,机械手的吸取部位在于包裹的中心部位,而包裹的中心部位通常对应的是包裹的空腔位置,可能导致纸箱被拉变形。所以,针对不同大小包裹的抽检,需要进行更换机械手,而更换机械手非常麻烦,所以这种捡拾装置一般只用于工厂中,针对大批量单一规格的包裹使用,并不适合卖家使用,卖家也缺乏更换机械手的能力。
发明内容
本发明的目的在于,提供一种用于电子商务产品质量抽检的包裹取料机械手及方法。本发明配合捡拾装置进行使用,可对不同尺寸包裹进行捡拾,能保证吸取部位在于包裹的棱边部位,保证纸箱不被拉变形,从而适用于卖家使用,包裹进入和离开输送线可用本发明配合捡拾装置进行操作,从而减少抽检的工人熟练,降低抽检成本。
本发明的技术方案:一种用于电子商务产品质量抽检的包裹取料机械手,包括由第一连杆、第二连杆、第三连杆和第四连杆组成的框架,第一连杆、第二连杆、第三连杆和第四连杆的底部均设有用于与真空设备连接的一排吸盘,第一连杆和第三连杆的外侧均设有第一传感器,第二连杆和第四连杆的外侧均设有第二传感器;
框架中轴线上设有转接柱,转接柱上设有第一联动机构和第二联动机构,第一联动机构可带动第一连杆和第三连杆相向运动,第二联动机构可带动第二连杆和第四连杆相向运动;
还包括控制器,真空设备、第一传感器、第二传感器、第一联动机构、第二联动机构均与控制器连接。
前述的用于电子商务产品质量抽检的包裹取料机械手中,所述第一联动机构包括分别位于转接柱两侧的两个第一电机,第一电机为双出轴步进电机,第一电机与控制器连接,第一电机的两个输出端均设有第一螺杆,第一螺杆上设有第一螺母,第一螺母通过第一转接板与第一连杆或第三连杆固定。
前述的用于电子商务产品质量抽检的包裹取料机械手中,所述第二联动机构包括与转接柱连接的第二电机,第二电机为双出轴步进电机,第二电机与控制器连接,第二电机的两个输出端均设有第二螺杆,第二螺杆上设有第二螺母,第二螺母通过第二转接板与第三连杆或第四连杆固定。
前述的用于电子商务产品质量抽检的包裹取料机械手中,所述一排吸盘包括两个外侧吸盘,两个外侧吸盘之间设有至少两个内侧吸盘,外侧吸盘上设有导向块,导向块位于第一连杆、第二连杆、第三连杆或第四连杆内,第一连杆、第二连杆、第三连杆和第四连杆在对应导向块的位置上均设有上下贯穿的长孔,第一连杆和第三连杆的两端均分别设有与第二连杆和第四连杆上的外侧吸盘连接的两个第一支架,第二连杆和第四连杆的两端均分别设有与第一连杆和第三连杆上的外侧吸盘连接的两个第二支架。
前述的用于电子商务产品质量抽检的包裹取料机械手中,所述外侧吸盘的上端设有穿过长孔的第一气管,所述内侧吸盘的上端设有穿过第一连杆、第二连杆、第三连杆或第四连杆的第二气管,第一气管和第二气管均与真空设备连接。
前述的用于电子商务产品质量抽检的包裹取料机械手中,所述第二转接板与第三连杆或第四连杆的中部固定,所述转接柱上设有通孔,所述第二电机固定于通孔内。
前述的用于电子商务产品质量抽检的包裹取料机械手中,所述第一连杆和第三连杆的外侧均设有第一滑轨,第一滑轨上设有两个分别与第二连杆和第四连杆固定的第一滑块;所述第二连杆和第四连杆的外侧均设有第二滑轨,第二滑轨上设有两个分别与第一连杆和第三连杆固定的第二滑块。
一种用于电子商务产品质量抽检的方法,采用机械手将堆垛上的包裹放置到输送线上供工人进行抽检,采用机械手将输送线上完成抽检的包裹取下形成堆垛。
与现有技术相比,本发明配合捡拾装置进行使用,通过两个联动机构带动四根连杆移动,使连杆上的吸盘可以对准不同尺寸大小的包裹顶面进行吸取,从而使本发明可用于不同尺寸的包裹的捡取,且吸取部位在于包裹的外侧棱边附近,从而保证纸箱不易变形,在捡取过程中不会破坏包裹。本发明还能保证包裹顶面的四个棱角上始终均有两个吸盘吸附,包裹的棱角处是包裹的最坚固部位,最不易发生变形,由此进一步保证包裹在捡取过程中不会被破坏。此外,本发明结构紧凑、稳定性强,拾取的成功率高。
附图说明
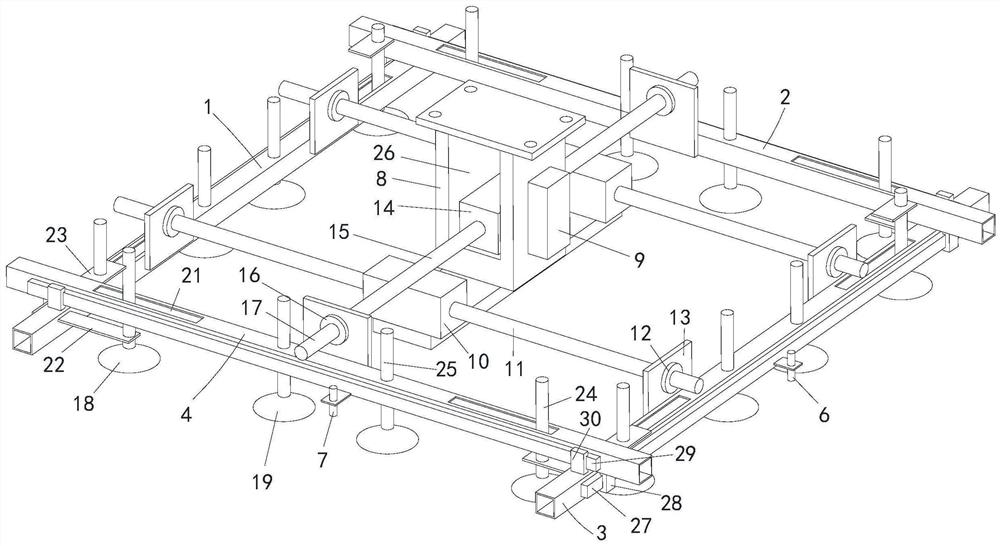
图1是本发明的结构示意图。
图2是外侧吸盘处的正视图。
图3是图2在A-A处的示意图。
附图中的标记为:1-第一连杆,2-第二连杆,3-第三连杆,4-第四连杆,6-第一传感器,7-第二传感器,8-转接柱,9-控制器,10-第一电机,11-第一螺杆,12-第一螺母,13-第一转接板,14-第二电机,15-第二螺杆,16-第二螺母,17-第二转接板,18-外侧吸盘,19-内侧吸盘,20-导向块,21-长孔,22-第一支架,23-第二支架,24-第一气管,25-第二气管,26-通孔,27-滑轨,28-滑块,29-第二滑轨,30-第二滑块。
具体实施方式
下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
实施例。一种用于电子商务产品质量抽检的包裹取料机械手,如图1所示,包括由第一连杆1、第二连杆2、第三连杆3和第四连杆4组成的、矩形的框架,第一连杆1、第二连杆2、第三连杆3和第四连杆4的底部均设有与真空设备(图中未示)连接的一排吸盘,第一连杆1和第三连杆3的外侧均设有第一传感器6,第二连杆2和第四连杆4的外侧均设有第二传感器7;所述第一传感器6和第二传感器7均为距离传感器;
框架中轴线上设有转接柱8,转接柱8上设有第一联动机构和第二联动机构,第一联动机构可带动第一连杆1和第三连杆3相向运动,第二联动机构可带动第二连杆2和第四连杆4相向运动;
还包括控制器9,控制器9与转接柱8的一侧固定,真空设备、第一传感器6、第二传感器7、第一联动机构、第二联动机构均与控制器9连接。
所述第一联动机构包括分别位于转接柱8两侧的两个第一电机10,第一电机10为双出轴步进电机,第一电机10与控制器9连接,第一电机10的两个输出端均设有第一螺杆11,位于第一电机10两个输出端上的两个第一螺杆11的螺纹旋向相反,第一螺杆11上设有第一螺母12,第一螺母12通过第一转接板13与第一连杆1或第三连杆3固定。
所述第二联动机构包括与转接柱8连接的第二电机14,第二电机14为双出轴步进电机,第二电机14与控制器9连接,第二电机14的两个输出端均设有第二螺杆15,位于第二电机14两个输出端上的两个第二螺杆15的螺纹旋向相反,第二螺杆15上设有第二螺母16,第二螺母16通过第二转接板17与第三连杆3或第四连杆4固定。
所述一排吸盘包括两个外侧吸盘18,两个外侧吸盘18之间设有两个内侧吸盘19,外侧吸盘18上设有导向块20,导向块20位于第一连杆1、第二连杆2、第三连杆3或第四连杆4内,第一连杆1、第二连杆2、第三连杆3和第四连杆4在对应导向块20的位置上均设有上下贯穿的长孔21,第一连杆1和第三连杆3的两端均分别设有与第二连杆2和第四连杆4上的外侧吸盘18连接的两个第一支架22,第二连杆2和第四连杆4的两端均分别设有与第一连杆1和第三连杆3上的外侧吸盘18连接的两个第二支架23。
所述外侧吸盘18的上端设有穿过长孔21的第一气管24,所述内侧吸盘19的上端设有穿过第一连杆1、第二连杆2、第三连杆3或第四连杆4的第二气管25,第一气管24和第二气管25均与真空设备连接。
所述第二转接板17与第三连杆3或第四连杆4的中部固定,所述转接柱8上设有通孔26,所述第二电机14固定于通孔26内。
所述第一连杆1和第三连杆3的外侧均设有第一滑轨27,第一滑轨27上设有两个分别与第二连杆2和第四连杆4固定的第一滑块28;所述第二连杆2和第四连杆4的外侧均设有第二滑轨29,第二滑轨29上设有两个分别与第一连杆1和第三连杆3固定的第二滑块30。
一种用于电子商务产品质量抽检的方法,采用上述机械手配合捡拾装置将堆垛上的包裹放置到输送线上供工人进行抽检,采用上述机械手配合捡拾装置将输送线上完成抽检的包裹取下形成堆垛。
工作原理:本发明配合捡拾装置进行使用,替换现有的捡拾装置上的机械手。通过转接柱8与捡拾装置连接,所述捡拾装置采用优傲的UR10机器人,控制器9与捡拾装置的PLC连接。当捡拾装置将本发明移动到待捡拾的包裹的上方后,捡拾装置向控制器9发出第一信号,控制器9接收到第一信号后,向第一电机10和第二电机14发出第二信号。
第一电机10接收到第二信号后启动,第一电机10带动第一螺杆11转动,第一螺杆11通过第一螺母12和第一转接板13带动第一连杆1和第三连杆3向内侧移动,第一连杆1和第三连杆3通过第一支架22带动第二连杆2和第四连杆4上的外侧吸盘18向内侧移动。当第一连杆1和第三连杆3分别越过包裹的两侧、对应包裹的顶面时,两个第一传感器6均会产生第三信号,当控制器9接收到两个第三信号时,向第一电机10发出第四信号,第一电机10停止运转,此时第一连杆1和第三连杆3上的吸盘对应于包裹顶面的其中两个棱边的内侧。
第二电机14接收到第二信号后启动,第二电机14带动第二螺杆15转动,第二螺杆15通过第二螺母16和第二转接板17带动第二连杆2和第四连杆4向内侧移动,第二连杆2和第四连杆4带动第一连杆1和第三连杆3上的外侧吸盘18向内侧移动。当第二连杆2和第四连杆4分别越过包裹的另外两侧、对应包裹的顶面时,两个第二传感器7均会产生第五信号,当控制器9接收到两个第五信号时,向第二电机14发出第六信号,第二电机14停止运转,此时第二连杆2和第四连杆4上的吸盘对应于包裹顶面的另外两个棱边的内侧。
控制器9在发出第四和第六信号后,先后向真空设备发出第七信号、向捡拾装置发出第八信号,真空设备接收第七信号后工作,使所有吸盘产生负压,包裹被固定在本发明上;捡拾装置接收到第八信号通过本发明将包裹带到另一个位置,然后向控制器发出第九信号,控制器依次向真空设备发出第十信号、向第一电机10发出第十一信号、向第二电机14发出第十二信号。真空设备接收第十信号停止工作,包裹被放下;第一电机10接收到第十一信号带动第一连杆1和第三连杆3回到原位;第二电机接收到第十二信号带动第二连杆2和第四连杆4回到原位。
以上步骤为一个循环,不断的将堆垛上的包括拾取到输送线上,或将输送线上的包裹拾取下来形成堆垛。每个输送线上配两个机械手和两个捡拾装置。
本发明配合捡拾装置进行使用,可对不同尺寸包裹进行捡拾,能保证吸取部位在于包裹的棱边部位,保证纸箱不被拉变形,从而适用于卖家使用,包裹进入和离开输送线可用本发明配合捡拾装置进行操作,从而减少抽检的工人熟练,降低抽检成本。