一种架空线路机器人障碍物识别方法
文献发布时间:2023-06-19 09:29:07
技术领域
本申请涉及电器设备技术领域,尤其涉及一种架空线路机器人障碍物识别方法。
背景技术
高压架空输电线路的运行状况直接影响着电力系统的配送状况,对电力系统的安全稳定运行起着关键作用,因此,需要对高压架空输电线路的运行情况进行定期巡检。近年来,移动机器人技术的发展为架空电力线路巡检提供了新的思路,高压架空输电线路的巡检方式已由人工巡检向特种机器人巡检转化。
架空线路巡检机器人(以下简称为架空线路机器人)用于线路缺陷的检测以及修复,实际使用时,架空线路机器人以一定速度沿输电线路爬行时,需要识别高压导线上的各种障碍物类型,例如防振锤、耐张线夹等,并能采取相应措施跨越该障碍。
目前,架空线路机器人在进行巡线作业时,利用安装在其上的摄像头实时捕捉高压线路上的图像信息,再通过卷积神经元网络模型进行障碍物识别。但是,卷积神经元网络模型训练的过程中,通常会消耗大量的处理器运行内存和计算量,影响卷积神经元网络模型的快速更新,从而影响架空线路机器人对障碍物的识别效率。
发明内容
本申请提供了一种架空线路机器人障碍物识别方法,以解决现有的用于识别高压架空输电线路上障碍物的卷积神经元网络模型在训练过程中,消耗大量的处理器运行内存和计算量,影响卷积神经元网络模型的快速更新,从而影响架空线路机器人对障碍物的识别效率的问题。
本申请提供了一种架空线路机器人障碍物识别方法,包括:
构建卷积神经元网络识别模型;
获取训练集,所述训练集为高压架空输电线路上的障碍物图像样本;
采用具有知识转移的低阶分解学习方法,利用训练集对卷积神经元网络识别模型进行训练;
架空线路巡检机器人利用其携带的摄像头实时捕捉高压架空输电线路上的线况图像信息,并发送至训练后的卷积神经元网络识别模型中;
训练后的卷积神经元网络识别模型根据线况图像信息,对高压架空输电线路上的障碍物进行识别。
可选地,采用具有知识转移的低阶分解学习方法,利用训练集对卷积神经元网络识别模型进行训练,包括,
构造一组空间域中秩为1的低秩滤波器基,利用低秩滤波器基,将卷积神经元网络识别模型的每个卷积层被分解为两个带矩形滤波器的新卷积层,带矩形滤波器的新卷积表示为:
式中,K
利用公式
利用公式
利用低秩分解,在卷积层用两个小的卷积核代替大的卷积核,在全连通层用两个小的矩阵权代替大的矩阵权,卷积层中的相应加速比S
采用知识转移方法,在原始网络和压缩网络之间转让整体和局部知识。
可选地,采用知识转移方法,在原始网络和压缩网络之间转让整体和局部知识,包括,
使用神经元网络第i层导块和基块输出之间的欧几里德距离建立局部损失函数;利用局部损失函数抑制消失梯度;
从固定的原始网络中学习压缩网络的参数,形成不同深度的原始网络和压缩网络的不对称连接,对于分解后的低秩网络,损耗函数为:
式中,
将整体知识与上述局部知识相结合,通过最小化总体损失函数来训练压缩网络,如下式所示:
式中,H代表知识转移中的交叉熵损失,L代表导块和基块,λ
基于式(6)和式(8)训练得到神经元网络,在网络全连接层中,利用矩阵乘运算,将输入矩阵
Z=WX (9)。
可选地,获取障碍物图像样本的过程为:架空线路机器人上的障碍物识别定位相机获取障碍物图像样本。
可选地,高压架空输电线路的障碍物包括有防振锤、耐张夹具、绝缘子、悬垂线夹。
本申请的架空线路机器人障碍物识别方法,提出了一个统一的整体和显式卷积神经网络压缩框架,该方法的目标是联合压缩卷积层和完全连接层,以同时加速在线推理和减少内存消耗。本申请的方法首先基于具有严格封闭形式保证的层间压缩公式进行部署,然后进行重新学习,以使原始网络和压缩网络之间的响应保持一致。本申请的方法提出了一种新的基于低阶分解的压缩方案,它同时加速卷积层并用精确的闭合解压缩完全连通层。为了进一步降低阶分解的压缩方案在高压缩率下造成的精度损失,本申请的方法进一步提出了一种有效的知识转移方案,将原始网络的输出和中间响应与压缩网络“显式”对齐。所提出的知识转移方案格式在所有层内和层间操作非线性变换函数,并以统一的方式最小化“局部”和“全局”重建误差。
附图说明
为了更清楚地说明本申请的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
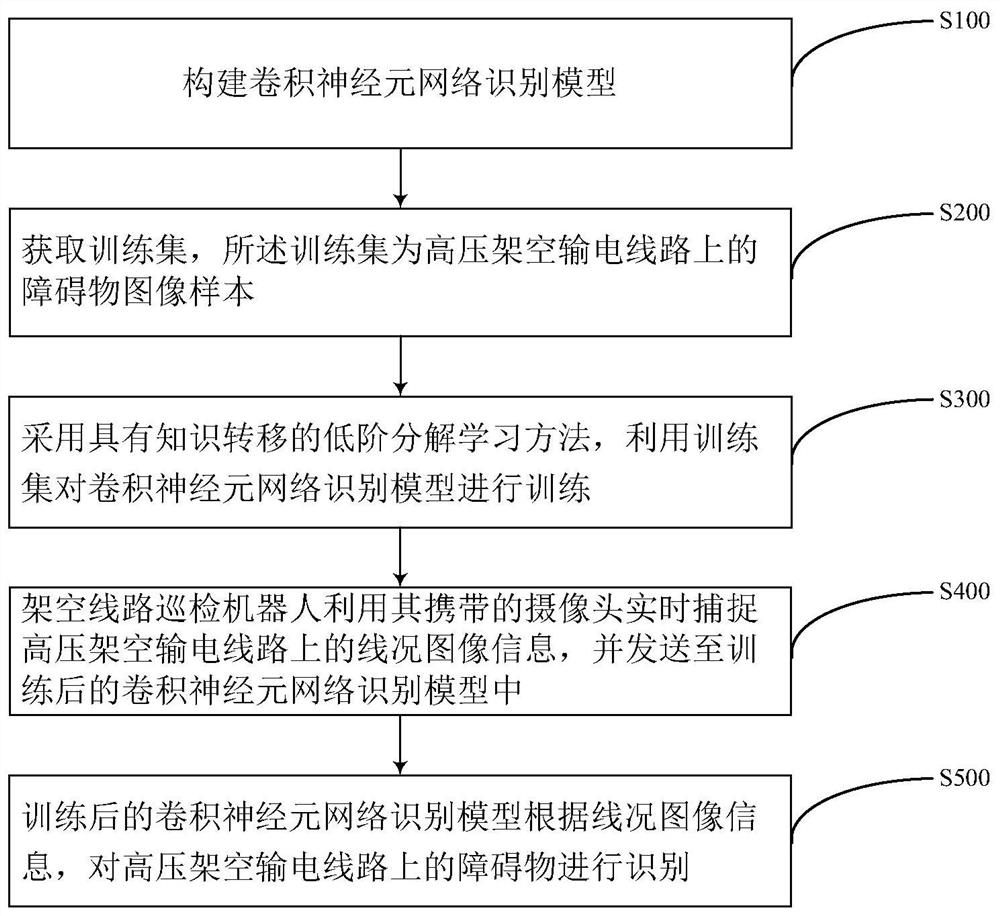
图1为本申请架空线路机器人障碍物识别方法的流程图。
具体实施方式
本申请提供一种架空线路机器人障碍物识别方法,用于架空线路机器人对高压架空输电线路上障碍物进行识别。图1为本申请架空线路机器人障碍物识别方法的流程图,架空线路机器人障碍物识别方法包括:
步骤S100,构建卷积神经元网络识别模型。
步骤S200,获取训练集,所述训练集为高压架空输电线路上的障碍物图像样本。
本申请中,获取障碍物图像样本的过程为:架空线路机器人上的障碍物识别定位相机获取障碍物图像样本。高压架空输电线路的障碍物包括有防振锤、耐张夹具、绝缘子、悬垂线夹。
步骤S300,采用具有知识转移的低阶分解学习方法,利用训练集对卷积神经元网络识别模型进行训练。
本申请中,采用具有知识转移的低阶分解学习方法,利用训练集对卷积神经元网络识别模型进行训练,包括,
步骤S310,构造带滤波器的神经元网络卷积层,具体包括一下步骤。
步骤S311,构造一组空间域中秩为1的低秩滤波器基,利用低秩滤波器基,将卷积神经元网络识别模型的每个卷积层被分解为两个带矩形滤波器的新卷积层,带矩形滤波器的新卷积表示为:
式中,K
卷积神经元网络可以看作是一种前向多层网络结构,它将输入图像映射到特定的输出矢量。卷积神经元网络中的单元被组织成一系列具有两个空间维度和第三个“地图”或“渠道”平方纬度的立体张量。
步骤S312,对于公式
式中,T
步骤S313,利用公式
利用公式
步骤S320,利用低秩分解,在卷积层用两个小的卷积核代替大的卷积核,在全连通层用两个小的矩阵权代替大的矩阵权,卷积层中的相应加速比S
与经典神经元网络中的原始卷积和矩阵乘法相比,该方法只需要卷积层中的加法运算,以及完全连接层中的参数。
步骤S330,采用知识转移方法,在原始网络和压缩网络之间转让整体和局部知识。
为保证神经元网络训练效果,通常将经过原始网络修剪后的压缩网络与原始网络一同训练,当训练过程中某个网络权重较小时(小于设定阈值),将其置0;屏蔽被设置为0的网络,更新后继续进行训练;以此循环,每隔训练几轮后,继续进行修剪,最终得到压缩网络。直接将低秩分解应用于多个层神经元网络会导致每一层的近似误差,进一步积累和传播。
本申请构造了一种利用知识转移方法的局部损失函数来校正压缩网络和原始网络的输出,该函数同时考虑局部非对称重构误差和全局重构误差,以减少最终输出层的整体误差。在这一框架内,压缩网络和原始网络之间的局部重建错误和全局累积错误被纳入一个全面的目标功能,以明确的示范知识。该方法将原始网络视为一个资源领域,压缩网络视为一个目标领域。为了产生更好的代表知识,该方法将激励全局累积错误与局部重建错误结合起来,以共享代表的共享空间组成部分。
本申请中,采用知识转移方法,在原始网络和压缩网络之间转让整体和局部知识,包括,步骤S331,建设隐蔽层监管,学习局部知识,具体包括:
使用神经元网络第i层导块和基块输出之间的欧几里德距离建立局部损失函数;利用局部损失函数抑制消失梯度;
从固定的原始网络中学习压缩网络的参数,形成不同深度的原始网络和压缩网络的不对称连接,对于分解后的低秩网络,损耗函数为:
式中,
步骤S332,将整体知识与上述局部知识相结合,通过最小化总体损失函数来训练压缩网络,如下式所示:
式中,H代表知识转移中的交叉熵损失,L代表导块和基块,λ
基于式
步骤S400,架空线路巡检机器人利用其携带的摄像头实时捕捉高压架空输电线路上的线况图像信息,并发送至训练后的卷积神经元网络识别模型中。
本申请中,架空线路巡检机器人利用其携带的摄像头实时捕捉高压架空输电线路上的线况图像信息,包括,将高清相机安装在架空线路巡检机器人本体和作业臂上,使架空线路巡检机器人在工作时高清相机能够正常拍摄到所需要跨越或避让的障碍物,高清相机视角应能够覆盖障碍物全貌,使其尽可能多的捕捉障碍物的特征。
步骤S500,训练后的卷积神经元网络识别模型根据线况图像信息,对高压架空输电线路上的障碍物进行识别。
本申请中,训练后的卷积神经元网络识别模型根据线况图像信息,对高压架空输电线路上的障碍物进行识别,包括:步骤S510,将线况图像信息实时输入到卷积神经元网络识别模型中。步骤S520,训练后的卷积神经元网络识别模型实时对摄像头所拍摄的障碍物类别进行识别。
本申请的架空线路机器人障碍物识别方法,提出了一个统一的整体和显式卷积神经网络压缩框架,该方法的目标是联合压缩卷积层和完全连接层,以同时加速在线推理和减少内存消耗。本申请的方法首先基于具有严格封闭形式保证的层间压缩公式进行部署,然后进行重新学习,以使原始网络和压缩网络之间的响应保持一致。本申请的方法提出了一种新的基于低阶分解的压缩方案,它同时加速卷积层并用精确的闭合解压缩完全连通层。为了进一步降低阶分解的压缩方案在高压缩率下造成的精度损失,本申请的方法进一步提出了一种有效的知识转移方案,将原始网络的输出和中间响应与压缩网络“显式”对齐。所提出的知识转移方案格式在所有层内和层间操作非线性变换函数,并以统一的方式最小化“局部”和“全局”重建误差。
以上所述的本申请实施方式并不构成对本申请保护范围的限定。
- 一种架空线路机器人障碍物识别方法
- 一种高压线路障碍物识别方法、装置、巡检机器人