一种增强型下肢外骨骼机器人系统
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及工业自动化领域,具体是一种增强型下肢外骨骼机器人系统。
背景技术
自20世纪60年代外骨骼开始被研发至今,已由军事领域转向民用市场,多以医疗和工业生产为主要目的,作为帮助残障人士行走以及工人负荷执行制造、搬运任务的辅助工具,目前正在向负重能力更强、控制力和灵活性能更高的方向研发。目前,大多数国家的科研机构对外骨骼的研究尚处于基础起步阶段,商用产品仍然较少,主要应用领域为军事、民用和医疗,其中,比较领先的国家主要是美国和日本,法、俄、韩、以色列等国也在技术上有所建树,我国各科研机构也在奋起研发。
外骨骼的研发融入了先进控制、信息、通信等技术的人-机电系统,在为操作者提供诸如保护、身体支撑等功能的基础上,通过融入传感、控制、信息耦合、移动计算等先进技术,为穿戴者提供额外的动力或能力,从而增强人体机能,能够在操作者的控制下完成一定的功能和任务,使人机融合为具有机器的力量和人的智力的超智能体,实现力量的增强和感官的延伸。
在物流、消防及军事领域,往往要求人员负重作业;在工业生产中许多工人每天需要使用重型的工具,长时间、重复性地高负荷作业。这些都会导致工人过度疲劳,肌肉损伤,骨骼畸变(如:脊柱侧弯,椎间盘突出、错位)等一系列安全和效率问题。
本发明的目的在于提供一种可由负重作业人员穿戴的、能为穿戴者提供支撑和运动助力的落地型下肢外骨骼系统,从而达到为穿戴者有效地减轻负重,降低穿戴者劳动强度的目的。
发明内容
本发明的目的在于提供一种增强型下肢外骨骼机器人系统,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种增强型下肢外骨骼机器人系统,包括供能单元、控制单元、驱动单元与外骨骼结构,所述外骨骼结构包括机架,所述机架的顶部固定连接有背部连接杆,所述机架与背部连接杆的外壁共同固定连接有背部靠板,所述背部连接杆与背部靠板的外壁共同设置有肩部承重架,所述机架的外壁贯穿设置有多个腰部横杆,多个所述腰部横杆的两端共同对称连接有腰部连杆,所述腰部连杆的一端设置有髋关节,所述髋关节的外壁连接有髋部侧摆关节机构,所述髋部侧摆关节机构的底部连接有大腿机构,所述大腿机构的外壁固定连接有腿部挡板,所述大腿机构的底部设置有膝部屈伸关节,所述膝部屈伸关节的外壁固定连接有小腿部杆件机构,所述小腿部杆件机构的底部设置有脚部踏板;
所述供能单元包括多个蓄电池,所述蓄电池与背部靠板的外壁固定连接;
所述控制单元包括控制器、安装于髋关节处的第一编码器、安装于腿部挡板外壁的第一压力传感器、安装于膝部屈伸关节处的第二编码器及安装于脚部踏板处的第二压力传感器;
所述驱动机构包括安装于腰部连杆外壁处的第一驱动电机与安装于大腿机构外壁处的第二驱动电机。
作为本发明进一步的方案:所述背部靠板的外壁顶部固定连接有肩带,所述背部靠板的外壁底部固定连接有腰部靠板。
作为本发明进一步的方案:所述脚部踏板包括上踏板,所述上踏板的顶部固定连接有踝部球关节,所述踝部球关节的与小腿部杆件机构的底端固定连接,所述上踏板的顶部贯穿设置有多个第二压力传感器,多个所述第二压力传感器的底端共同固定连接有下踏板。
作为本发明进一步的方案:所述小腿部杆件机构由内管、外管及用于使内管与外管进行固定的固定机构组成,所述内管的一端位于外管内部,且内管与外管滑动连接,所述固定机构安装于外管的外壁处。
作为本发明进一步的方案:所述大腿机构由滑板与传动箱组成,所述传动箱与滑板滑动连接,所述滑板的外壁设置有定位机构。
作为本发明进一步的方案:所述第一驱动电机通过腰部连杆内部的传动机构与髋关节传动连接。
作为本发明进一步的方案:所述第二驱动电机通过大腿机构内部的传动机构与膝部屈伸关节传动连接。
作为本发明再进一步的方案:所述外骨骼结构包括十二个自由度,十二个所述自由度分别为:两个髋部屈伸关节前后旋转自由度a1;两个髋部侧摆关节外展内收自由度a2;两个膝关节屈伸自由度a3;两个踝部水平旋转自由度a4;两个踝部翻转自由度a5;两个踝部屈伸自由度a6。
与现有技术相比,本发明的有益效果是:
1、本发明是一种可由负重作业人员穿戴的、能为穿戴者提供支撑和运动助力的落地型下肢外骨骼机器人系统,通过采用与地面直接接触的“落地型”结构,能够为穿戴者有效地减轻负重,降低穿戴者的劳动强度。
2、本发明可以通过髋关节和膝关节处的驱动单元为穿戴者提供动力进行助力或保持固定姿态,从而实现行走、慢跑、蹲坐等动作和姿态以及减轻穿戴者负重的功能。
3、本发明通过十二个自由度的设置,可有效的降低各部件之间的空间干涉问题,同时更加符合人体工学,使穿戴者使用时更加舒适。
附图说明
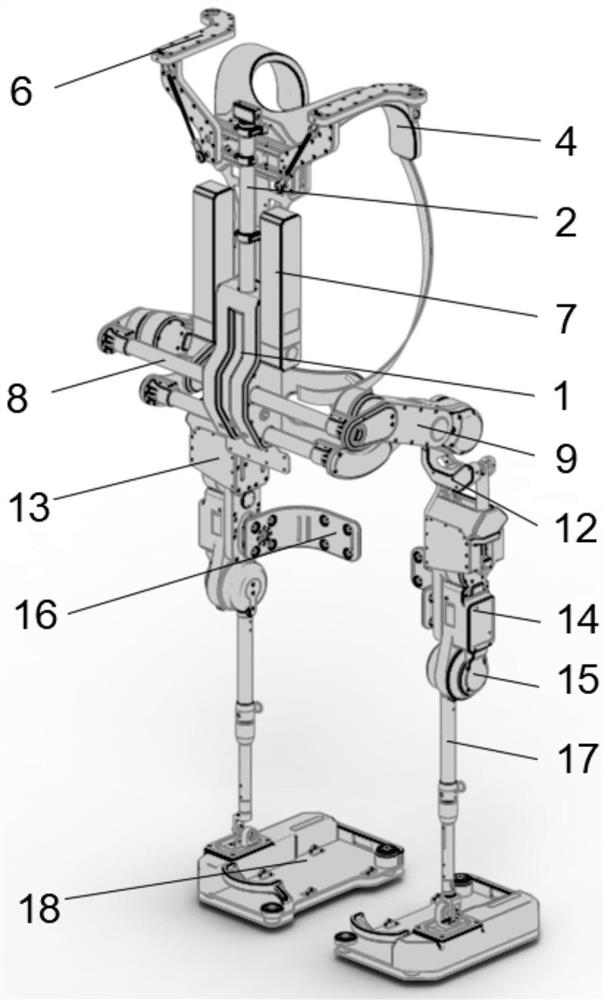
图1为一种增强型下肢外骨骼机器人系统的结构示意图。
图2为一种增强型下肢外骨骼机器人系统中腰部靠板的结构示意图。
图3为一种增强型下肢外骨骼机器人系统中大腿机构的结构示意图。
图4为一种增强型下肢外骨骼机器人系统中脚部踏板的结构示意图。
图5为一种增强型下肢外骨骼机器人系统中腿部自由度的结构示意图。
图6为一种增强型下肢外骨骼机器人系统中踝部自由度的结构示意图。
其中,机架1、背部连接杆2、背部靠板3、肩带4、腰部靠板5、肩部承重架6、蓄电池7、腰部横杆8、腰部连杆9、第一驱动电机10、髋关节11、髋部侧摆关节机构12、大腿机构13、第二驱动电机14、膝部屈伸关节15、腿部挡板16、小腿部杆件机构17、脚部踏板18、上踏板19、第二压力传感器20、下踏板21、踝部球关节22。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1~6,本发明实施例中,一种增强型下肢外骨骼机器人系统,包括供能单元、控制单元、驱动单元与外骨骼结构,所述外骨骼结构包括机架1,所述机架1的顶部固定连接有背部连接杆2,所述机架1与背部连接杆2的外壁共同固定连接有背部靠板3,所述背部连接杆2与背部靠板3的外壁共同设置有肩部承重架6,所述机架1的外壁贯穿设置有多个腰部横杆8,多个所述腰部横杆8的两端共同对称连接有腰部连杆9,所述腰部连杆9的一端设置有髋关节11,所述髋关节11的外壁连接有髋部侧摆关节机构12,所述髋部侧摆关节机构12的底部连接有大腿机构13,所述大腿机构13的外壁固定连接有腿部挡板16,所述大腿机构13的底部设置有膝部屈伸关节15,所述膝部屈伸关节15的外壁固定连接有小腿部杆件机构17,所述小腿部杆件机构17的底部设置有脚部踏板18;
所述供能单元包括多个蓄电池7,所述蓄电池7与背部靠板3的外壁固定连接;
所述控制单元包括控制器、安装于髋关节11处的第一编码器、安装于腿部挡板16外壁的第一压力传感器、安装于膝部屈伸关节15处的第二编码器及安装于脚部踏板18处的第二压力传感器20;
所述驱动机构包括安装于腰部连杆9外壁处的第一驱动电机10与安装于大腿机构13外壁处的第二驱动电机14。
所述背部靠板3的外壁顶部固定连接有肩带4,所述背部靠板3的外壁底部固定连接有腰部靠板5。
所述脚部踏板18包括上踏板19,所述上踏板19的顶部固定连接有踝部球关节22,所述踝部球关节22的与小腿部杆件机构17的底端固定连接,所述上踏板19的顶部贯穿设置有多个第二压力传感器20,多个所述第二压力传感器20的底端共同固定连接有下踏板21。
所述髋部侧摆关节机构12内设置有阻尼调节杆。
所述小腿部杆件机构17由内管、外管及用于使内管与外管进行固定的固定机构组成,所述内管的一端位于外管内部,且内管与外管滑动连接,所述固定机构安装于外管的外壁处。
所述大腿机构13由滑板与传动箱组成,所述传动箱与滑板滑动连接,所述滑板的外壁设置有定位机构。
所述第一驱动电机10通过腰部连杆9内部的传动机构与髋关节11传动连接。
所述第二驱动电机14通过大腿机构13内部的传动机构与膝部屈伸关节15传动连接。
所述外骨骼结构包括十二个自由度,十二个所述自由度分别为:两个髋部屈伸关节前后旋转自由度a1;两个髋部侧摆关节外展内收自由度a2;两个膝关节屈伸自由度a3;两个踝部水平旋转自由度a4;两个踝部翻转自由度a5;两个踝部屈伸自由度a6。
位于腰部连杆9处的控制器和第一驱动电机10通过传动带将动力输出至髋关节11处的齿轮减速器,继而带动大腿部构件绕髋关节转轴(a1)实现前驱和后伸动作;髋部侧摆关节机构12的侧向外展和内收动作则通过人力驱动,以驱使大腿部构件绕髋关节转轴(a2)实现;位于大腿机构13处的控制器和第二驱动电机14,通过传动带将动力传至位于膝部屈伸关节15内的齿轮减速器,从而将动力经由减速机构传递给小腿部杆件机构17,进而实现小腿部杆件机构17绕膝关节转轴(a3)的前屈和后伸动作
脚部踏板18的趾屈动作和背屈动作则是通过人力驱动脚部踏板18绕踝部球关节22处的水平横向转轴(a6)实现;而脚部踏板18的内旋动作和外旋动作则同样是经由人力驱动,通过脚部踏板18绕踝部球关节22处的垂直转轴(a4)水平转动实现;脚部踏板18的内翻和外翻动作则是通过人力驱动,驱使脚部踏板18绕踝部球关节18处的水平纵向转轴(a5)转动实现。
本下肢外骨骼机器人系统的承重功能通过肩部承重架6挂载重物或其他挂件以及通过增设背部/腰部载物架实现。
本下肢外骨骼机器人系统的反馈系统由两个腿部挡板16处的第一压力传感器,两个髋关节11处的第一编码器(绝对位置编码器),两个膝部屈伸关节15处的第二编码器(绝对位置编码器),以及位于两个腰部连杆9处的控制器与第一驱动电机10,位于两个大腿机构13处的控制器与第二驱动电机14。同时通过由以上传感器组成的闭环反馈控制系统进行实时侦测、反馈和修正。腿部高度采用可调节设计,可分别实现大腿长度和小腿长度的调节功能,以满足不同身高穿戴者的需求。
此外,本下肢外骨骼机器人系统在平衡控制方面,创新性地在髋部侧摆关节机构12处采用了阻尼调整机构,通过阻尼调节杆的设置,在实现髋部侧摆关节的外展和内收的动作的同时,通过调整髋关节外展和内收的阻尼进而控制对侧肩带4的压力。其具体实施方式为:特例地,当外骨骼机器人系统穿戴者向右侧倾角度θ时,右侧脚部踏板18处所受重力大于左侧脚部踏板18处所受重力,右侧肩带4处于相对松弛状态,左侧肩带4处于相对张紧状态。在背负重物时,左右脚踏板承受重力差距变大,自然状态下,会导致穿戴者有向右侧倾倒的趋势,要阻止这种倾倒趋势,需要很大的抵抗力矩,这对人体的下肢肌肉力量有很高的要求。而该外骨骼平衡系统通过在髋部侧摆关节采用阻尼结构设计,即在左右两侧髋部外展和内收关节处设置有阻尼调整机构,使左右肩带受力更加均衡,大大降低了侧向倾倒的危险。该例中,负重状态下,当向右侧倾的瞬时加速度过大时,右侧阻尼调节杆会产生抵抗外展转动的阻尼,从而起到控制肩带压力的作用。
如图4所示,脚部踏板18由上踏板19,下踏板21,以及上下踏板之间的三只第二压力传感器20构成,三只传感器所在平面与上下踏板平行,运动过程中,通过位于脚部踏板18的三只第二压力传感器20反馈的压力数据确定脚部重心的位置,然后经过处理器和控制器分析处理后控制两个第一驱动电机10、第二驱动电机14做出指定的响应,从而分别控制双腿各个关节做出相应的姿态,以便使运动更加协调。
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。