一种智能调度载人机器人
文献发布时间:2023-06-19 09:29:07
技术领域
本发明属于机械设备领域,具体涉及一种智能调度载人机器人。
背景技术
在大型生产加工车间内,本身需求车间面积要大,因为生产设备结构复杂且整体生产线系统延伸范围大,若设备或生产质量哪个环节出现了问题,则需要人工排查,并依次手动记录排查路线和结果,此过程效率不高,而且下次出现问题不好溯源,不能很好地跟进现在智能制造的脚步。
发明内容
有鉴于此,本发明提供一种智能调度载人机器人,该机器人可直接与生产线设备智能连接,当设备或生产质量哪个环节出现了问题时,机器人自动接收到报警,并可载着操作人员直接至故障点进行维修、排查,数据结果实时同步记录,可溯源,同时智能调度载人机器人还具有爬坡和防晃动功能,性能优越,适用范围广泛。
具体技术方案如下:
一种智能调度载人机器人,其特征在于:包括车体模组、平衡模组、座椅模组和电气控制模组,所述平衡模组设置在所述座椅模组与所述车体模组中间连接处,使座椅模组保持平衡状态;
所述车体模组包括车体和三角驱动轮,所述三角驱动轮设置在车体底部的两侧,所述三角驱动轮通过设置在三角板架上的三个滚轮,实现机器人的运动;
所述座椅模组包括座椅和安装在座椅扶手上的旋转安全臂,所述旋转安全臂以扶手的一端为支撑连接点,并可绕该支撑连接点旋转;
所述电气控制模组分别与所述车体模组、平衡模组、座椅模组电性连接,用于控制机器人运行过程。
进一步,所述平衡模组通过轴承座固定在所述车体上方,包括调节板、蜗杆、涡轮和电机,所述调节板呈等腰三角形,调节板的底边固定在座椅的底部边缘,底边对应的顶角则设置在轴承座上,所述蜗杆连接涡轮,涡轮与调节板的顶角连接,所述电机用于驱动蜗杆。
进一步,所述车体上设置有两组感应系统,分别设置在所述车体两侧,每组感应系统包括三个激光感应器,分别位于围绕三角驱动轮前方、后方和上方的车体上。
进一步,所述扶手上设置有磁吸装置,用于吸固所述旋转安全臂。
进一步,所述旋转安全臂上安装有中控屏。
进一步,所述座椅下方还设置有脚踏板。
本发明附加的方面和优点将在下面的描述中进一步给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
本发明的上述和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
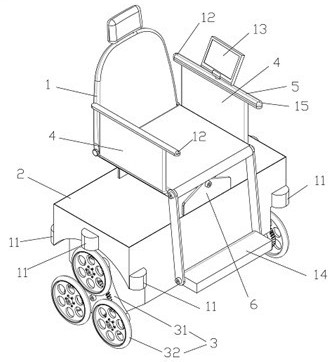
图1所示为智能调度载人机器人立体结构示意图;
图2所示为智能调度载人机器人侧面结构示意图;
其中,1-座椅,2-车体,3-三角驱动轮,31-三角板架,32-滚轮,4-扶手,5-旋转安全臂,6-轴承座,7-调节板,8-蜗杆,9-涡轮,10-电机,11-激光感应器,12-磁吸装置,13-中控触摸屏,14-脚踏板,15-支撑连接点。
具体实施方式
下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
在本发明的描述中,需要理解的是,术语 “上”、“下”、“底”、“顶”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
图1示出了本发明智能调度载人机器人的一种实施例结构示意图,也是一种优选实施例示意图,结合图2。本实施例的智能调度载人机器人,包括车体模组、平衡模组、座椅模组和电气控制模组,平衡模组设置在座椅模组与车体模组中间连接处,使座椅模组保持平衡状态;车体模组包括车体2和三角驱动轮3,三角驱动轮3设置在车体2底部的两侧,三角驱动轮3通过设置在三角板架31上的三个滚轮32,实现机器人的运动;座椅模组包括座椅1和安装在座椅扶手4上的旋转安全臂5,旋转安全臂5以扶手4的一端为支撑连接点15,并可绕该支撑连接点15旋转,当操作人员未坐上座椅1,旋转安全臂5与一边扶手4平行而立,当操作人员坐上座椅后,旋转安全臂5旋转至另一边扶手4上,围挡在操作人员前方;电气控制模组分别与车体模组、平衡模组、座椅模组电性连接,用于控制机器人运行过程。
本发明更为具体的实现方式以下作具体展开:
优选的,平衡模组通过轴承座6固定在车体2上方,包括调节板7、蜗杆8、涡轮9和电机10,调节板7呈等腰三角形,调节板7的底边固定在座椅1的底部边缘,底边对应的顶角则设置在轴承座6上,其中蜗杆8连接涡轮9,涡轮9与调节板7的顶角连接,电机10用于驱动蜗杆8,结合陀螺仪平衡原理使座椅1通过平衡模组左、右保持最佳平衡状态,防止座椅晃动。
优选的,车体2上设置有两组感应系统,分别设置在车体2两侧,每组感应系统包括三个激光感应器11,分别位于围绕三角驱动轮3前方、后方和上方的车体2上,全方位的感应三角驱动轮3的行走地形,其中两个滚轮32滚动时可带动车体2进行平地移动,三个滚轮32与三角板架31一起滚动时可带动机器人走阶梯。
优选的,扶手4上设置有磁吸装置12,用于吸固旋转安全臂4,在本实施例中,旋转安全臂4以扶手4的一端为支撑连接点15可进行最大270°的旋转,绕到另一扶手的磁吸装置12位置后自动吸附固定住。
优选的,旋转安全臂5上安装有中控屏13,操作人员可通过中控屏收集、处理、和记录工作数据和结果,并可将工作内容直接上传到总控中心,方便领导检查。
优选的,座椅下方还设置有脚踏板。
另外需要说明的是,本发明中没有对电气控制模组做具体的展示,然而根据发明的相关内容可以理解,车体模组、平衡模组、座椅模组需要与其电性连接,并在其控制下完成整个工作,在本实施例中电气控制模组可以为基于可编程控制器PLC(ProgrammableLogic Controller)的工控机,因其为成熟技术且不影响本发明的理解,故在此不作具体展开说明。
本实施例的智能调度载人机器人,可直接与生产线设备智能连接,性能优越,适用范围广泛,当设备或生产质量哪个环节出现了问题时,机器人可自动接收到报警,并可载着操作人员直接至故障点进行维修、排查,数据结果实时同步记录,可溯源,同时智能调度载人机器人还具有爬坡和防晃动功能,本发明提供的机器人可以轻松实现整个车间的全程自动智能化,工作效率高且适用范围广。
尽管参照本发明的示意性实施例对本发明的具体实施方式进行了详细的描述,但是必须理解,本领域技术人员可以设计出多种其他的改进和实施例,这些改进和实施例将落在本发明原理的精神和范围之内。具体而言,在前述公开、附图以及权利要求的范围之内,可以在零部件和/或者从属组合布局的布置方面作出合理的变型和改进,而不会脱离本发明的精神。除了零部件和/或布局方面的变型和改进,其范围由所附权利要求及其等同物限定。