二自由度球面运动并联机构
文献发布时间:2023-06-19 09:30:39
技术领域
本发明属于机器人技术领域,特别涉及一种二自由度球面运动并联机构。
背景技术
球面机构作为一类特殊的空间机构,当机构运动时,其构件上所有点在一个与固定点保持不变距离的球面上运动。球面机构具有结构简单、工作空间大等优点。球面两自由度机构可以实现沿球面曲线的运动,在食品、药品的包装,工艺产品的加工,球形物体的检测等方面应用广泛。
现有的球面两自由度并联机构中,其输出运动都是机构上一点在球面上的移动,而很多情况需要末端连杆在球面上具有灵活的运动,且结构更简单的机构。
发明内容
针对以上情况,本发明提供了一种在运动过程中固定连杆和运动连杆始终关于中间平面保持对称,并且运动连杆具有以球心为转动中心的两转动自由度球面运动并联机构。
本发明采用的技术方案是,一种二自由度球面运动并联机构,其包括第一连杆、第二连杆、第三连杆、第四连杆、第五连杆和第六连杆,所述第一连杆的一端通过转动副一与所述第二连杆一端连接,且所述第二连杆的另一端通过转动副二与所述第三连杆的一端连接,所述第三连杆的另一端通过转动副三与所述第四连杆的一端连接,且所述第四连杆的另一端通过万向节一与所述第五连杆的一端连接,所述第五连杆的另一端通转动副四与所述第六连杆的一端连接,且所述第六连杆的另一端通过万向节二与所述第一连杆的另一端连接,所述第一连杆是固定连杆,所述第四连杆是末端连杆,所述转动副一、第二连杆、转动副二、第三连杆以及转动副三构成对称的RRR串联分支,且所述转动副一、转动副二以及转动副三的轴线汇交于第一球心,所述万向节一、第五连杆、转动副四、第六连杆以及万向节二构成对称的URU串联分支,且所述万向节一的外侧转动副轴线、所述万向节二的外侧转动副轴线以及转动副四中心轴线相交于第一交点。
进一步地,所述万向节一的内侧转动副轴线垂直于所述第四连杆的第一端面,且所述万向节一的外侧转动副轴线垂直于所述万向节一的内侧转动副轴线,所述万向节二的内侧转动副轴线垂直于所述第一连杆的第一端面,且所述万向节二的外侧转动副轴线垂直于所述万向节二的内侧转动副轴线。
优选地,当所述万向节一的内侧转动副轴线与所述万向节二的内侧转动副轴线平行时,过所述第一交点与所述万向节一内侧转动副轴线平行的直线不过所述第一球心。
优选地,当所述万向节一的内侧转动副轴线与所述万向节二的内侧转动副轴线相交于第三交点时,过所述第一交点和所述第三交点的直线不过所述第一球心。
优选地,所述转动副二轴线与所述第一球心间的连线、所述第一球心与所述第一交点的连线以及所述第一交点与所述转动副二轴线间的连线构成中间平面。
优选地,所述第一连杆、第二连杆、第三连杆以及第四连杆均为球面连杆,其同球心且半径相等。
本发明的第二方面采用的技术方案是,一种二自由度球面运动并联机构组成的多级并联机构,其包括多个并联机构单元,且每个所述并联机构单元均包括第一连杆、第二连杆、第三连杆、单元连接件、第五连杆和第六连杆,相邻两个并联机构单元中,按照运动输出方向分为前级并联机构单元和后级并联机构单元,其中所述前级并联机构单元的第一连杆的一端通过转动副一与所述第二连杆一端连接,且所述第二连杆的另一端通过转动副二与所述第三连杆的一端连接,所述第三连杆的另一端通过转动副三与所述单元连接件的一端连接,且所述单元连接件的另一端通过万向节一与所述第五连杆的一端连接,所述第五连杆的另一端通转动副四与所述第六连杆的一端连接,且所述第六连杆的另一端通过万向节二与所述第一连杆的另一端连接;所述后级并联机构单元的第二连杆的一端通过转动副五与所述前级并联机构单元的单元连接件的一端连接,且所述第二连杆的另一端通过转动副六与所述第三连杆一端连接,所述第三连杆的另一端通过转动副七与所述单元连接件的一端连接,且所述单元连接件的另一端通过万向节三与所述第五连杆的一端连接,所述第五连杆的另一端通转动副八与所述第六连杆的一端连接,且所述第六连杆的另一端通过万向节四与所述前级并联机构单元的单元连接件的另一端连接,且所述前级并联机构单元的转动副三与所述后级并联机构单元的转动副五之间采用齿轮啮合驱动,所述前级并联机构单元的万向节一的内侧转动副与所述后级并联机构单元的万向节四的内侧转动副之间采用齿轮啮合驱动。
进一步地,根据需要能设置多个并联机构单元,且所述相邻并联机构单元共用所述一个单元连接件。
优选地,所述前级并联机构单元的转动副三与所述后级并联机构单元的转动副五之间亦可采用皮带传动,所述前级并联机构单元的万向节一的内侧转动副与所述后级并联机构单元的万向节四的内侧转动副之间亦可采用皮带传动。
本发明的特点和有益效果是:
1、本发明提供的一种二自由度球面运动并联机构,机构的固定连杆和末端连杆在运动过程中始终关于中间平面对称,可以实现完全对称的运动。
2、本发明提供的一种二自由度球面运动并联机构,末端连杆可以实现绕中间平面上过转动中心的以任意一条直线为轴线的连续转动,给机构的应用和控制带来了很大的方便,具有广阔的应用前景。
3、本发明提供的一种二自由度球面运动并联机构,比现有的二自由度机构连杆数更少,结构更简单,可操作性更强。
4、本发明提供的一种二自由度球面运动并联机构组成的多级并联机构,可以将多个并联机构单元组合连接,并在相邻两个并联机构单元之间采用传动连接,使得前级并联机构单元的运动可以传递至后级并联机构单元上,可实现中心控制的大行程运动,具有结构简单,操作性强等优点。
附图说明
图1是本发明的实施例1结构示意图;
图2是本发明实施例1的侧视图;
图3为本发明的第一连杆结构示意图;
图4是本发明的实施例2结构示意图;
图5是本发明的实施例3结构示意图;
图6是本发明的实施例3侧视图。
主要附图标记:
第一连杆1;第二连杆2;第三连杆3;第四连杆4;第五连杆5;第六连杆6;单元连接件7;转动副R;万向节U;第一交点P1;第二交点P2;第三交点P11;第一球心O。
具体实施方式
为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
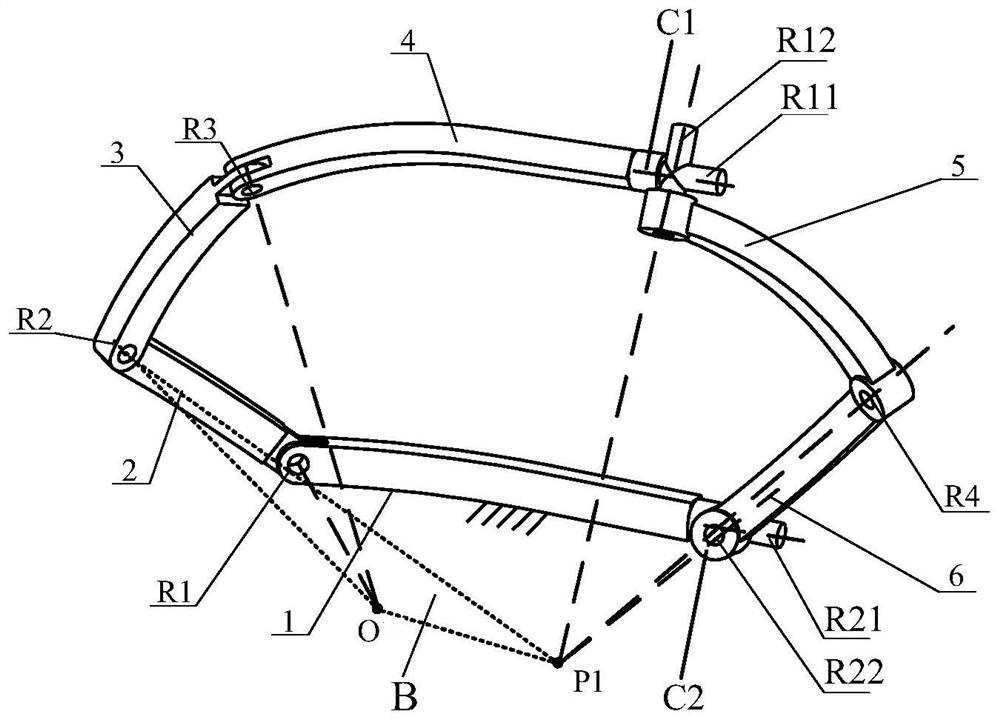
本发明提供一种二自由度球面运动并联机构,如图1所示,其包括第一连杆1、第二连杆2、第三连杆3、第四连杆4、第五连杆5和第六连杆6,第一连杆1的一端通过转动副一R1与第二连杆2一端连接,且第二连杆2的另一端通过转动副二R2与第三连杆3的一端连接,第三连杆3的另一端通过转动副三R3与第四连杆4的一端连接,且第四连杆4的另一端通过万向节一U1与第五连杆5的一端连接,第五连杆5的另一端通转动副四R4与第六连杆6的一端连接,且第六连杆6的另一端通过万向节二U2与第一连杆1的另一端连接,第一连杆1是固定连杆,第四连杆4是末端连杆,转动副一R1、第二连杆2、转动副二R2、第三连杆3以及转动副三R3构成对称的RRR串联分支,且转动副一R1、转动副二R2以及转动副三R3的轴线汇交于第一球心O,万向节一U1、第五连杆5、转动副四R4、第六连杆6以及万向节二U2构成对称的URU串联分支,且万向节一U1的外侧转动副轴线R12、万向节二U2的外侧转动副轴线U22以及转动副四R4中心轴线相交于第一交点P1。
进一步地,万向节一U1的内侧转动副轴线R11垂直于第四连杆4的第一端面,且万向节一U1的外侧转动副轴线R12垂直于万向节一U1的内侧转动副轴线R11,万向节二U2的内侧转动副轴线R21垂直于第一连杆1的第一端面,且万向节二U2的外侧转动副轴线R22垂直于万向节二U2的内侧转动副轴线R21。
优选地,当万向节一U1的内侧转动副轴线R11与万向节二U2的内侧转动副轴线R21平行时,过第一交点P1与万向节一U1内侧转动副轴线R11平行的直线不过第一球心O。
优选地,当万向节一U1的内侧转动副轴线R11与万向节二U2的内侧转动副轴线R21相交于第三交点P11时,过第一交点P1和第三交点P11的直线不过第一球心O。
优选地,转动副二R2轴线与第一球心间O的连线、第一球心O与第一交点P1的连线以及第一交点O与转动副二R2轴线间的连线构成中间平面B。
如图3所示,第一连杆1、第二连杆2、第三连杆3以及第四连杆4均为球面连杆,其同球心且半径相等。第一连杆1和第四连杆4结构相似,且关于中间平面B对称,其中第一连杆1的L1N1段为弧形,M1N1段为与L1N1段相切的直线段。
本发明的第二方面采用的技术方案是,一种二自由度球面运动并联机构组成的多级并联机构,如图5和图6所示,其包括多个并联机构单元,且每个并联机构单元均包括第一连杆1、第二连杆2、第三连杆3、单元连接件7、第五连杆5和第六连杆6,相邻两个并联机构单元中,按照运动输出方向分为前级并联机构单元和后级并联机构单元,其中前级并联机构单元的第一连杆1的一端通过转动副一R1与第二连杆2一端连接,且第二连杆2的另一端通过转动副二R2与第三连杆3的一端连接,第三连杆3的另一端通过转动副三R3与单元连接件7的一端连接,且单元连接件7的另一端通过万向节一U1与第五连杆5的一端连接,第五连杆5的另一端通转动副四R4与第六连杆6的一端连接,且第六连杆6的另一端通过万向节二U2与第一连杆1的另一端连接;后级并联机构单元的第二连杆2的一端通过转动副五R5与前级并联机构单元的单元连接件7的一端连接,且第二连杆2的另一端通过转动副六R6与第三连杆3一端连接,第三连杆3的另一端通过转动副七R7与单元连接件7的一端连接,且单元连接件7的另一端通过万向节三U3与第五连杆5的一端连接,第五连杆5的另一端通转动副八R8与第六连杆6的一端连接,且第六连杆6的另一端通过万向节四U4与前级并联机构单元的单元连接件7的另一端连接,且前级并联机构单元的转动副三R3与后级并联机构单元的转动副五R5之间采用齿轮啮合驱动,前级并联机构单元的万向节一U1的内侧转动副R11与后级并联机构单元的万向节四U4的内侧转动副R41之间采用齿轮啮合驱动。
进一步地,根据需要能设置多个并联机构单元,且相邻并联机构单元共用一个单元连接件7。
优选地,前级并联机构单元的转动副三R3与后级并联机构单元的转动副五R5之间亦可采用皮带传动,前级并联机构单元的万向节一U1的内侧转动副R11与后级并联机构单元的万向节四U4的内侧转动副R41之间亦可采用皮带传动。
本发明的具体操作步骤如下:
实施例1
本发明提供一种二自由度球面运动并联机构,如图1所示,其包括第一连杆1、第二连杆2、第三连杆3、第四连杆4、第五连杆5和第六连杆6,第一连杆1的一端通过转动副一R1与第二连杆2一端连接,且第二连杆2的另一端通过转动副二R2与第三连杆3的一端连接,第三连杆3的另一端通过转动副三R3与第四连杆4的一端连接,且第四连杆4的另一端通过万向节一U1与第五连杆5的一端连接,第五连杆5的另一端通转动副四R4与第六连杆6的一端连接,且第六连杆6的另一端通过万向节二U2与第一连杆1的另一端连接,第一连杆1是固定连杆,第四连杆4是末端连杆,转动副一R1、第二连杆2、转动副二R2、第三连杆3以及转动副三R3构成对称的RRR串联分支,且转动副一R1、转动副二R2以及转动副三R3的轴线汇交于第一球心O,万向节一U1、第五连杆5、转动副四R4、第六连杆6以及万向节二U2构成对称的URU串联分支,且万向节一U1的外侧转动副轴线R12、万向节二U2的外侧转动副轴线U22以及转动副四R4中心轴线相交于第一交点P1。
当万向节一U1的内侧转动副轴线R11与万向节二U2的内侧转动副轴线R21平行时,过第一交点P1与万向节一U1内侧转动副轴线R11平行的直线不过第一球心O。当万向节一U1的内侧转动副轴线R11与万向节二U2的内侧转动副轴线R21相交于第三交点P11时,过第一交点P1和第三交点P11的直线不过第一球心O。
本发明将第一连杆1上的转动副R1和转动副R21作为驱动副;将第四连杆4作为机构的输出连杆,驱动副发生运动,使第四连杆4始终在球面上进行运动。转动副R1转动之后,第二连杆2发生运动,第三连杆3会随着第二连杆2运动,转动副R21转动之后,第六连杆6发生运动,第五连杆5会随着第六连杆6运动,最后使位于第三连杆3和第五连杆5之间的第四连杆4,即输出连杆发生运动,运动形式为绕着过第一球心O,在中间平面B上的任意的一条轴线进行连续转动,发生无伴随运动,输出连杆始终在以第一球心O为球心的球面上运动。
实施例2
本发明提供一种二自由度球面运动并联机构,如图3所示,其包括第一连杆1、第二连杆2、第三连杆3、第四连杆4、第五连杆5和第六连杆6,第一连杆1的一端通过转动副一R1与第二连杆2一端连接,且第二连杆2的另一端通过转动副二R2与第三连杆3的一端连接,第三连杆3的另一端通过转动副三R3与第四连杆4的一端连接,且第四连杆4的另一端通过万向节一U1与第五连杆5的一端连接,第五连杆5的另一端通转动副四R4与第六连杆6的一端连接,且第六连杆6的另一端通过万向节二U2与第一连杆1的另一端连接,第一连杆1是固定连杆,第四连杆4是末端连杆,转动副一R1、第二连杆2、转动副二R2、第三连杆3以及转动副三R3构成对称的RRR串联分支,且转动副一R1、转动副二R2以及转动副三R3的轴线汇交于第一球心O,万向节一U1、第五连杆5、转动副四R4、第六连杆6以及万向节二U2构成对称的URU串联分支,且万向节一U1的外侧转动副轴线R12、万向节二U2的外侧转动副轴线U22以及转动副四R4中心轴线相交于第二交点P2,过第三交点P2,与转动副四R4平行的直线不通过第一球心O。
本发明将第一连杆1上的转动副R1和转动副R21作为驱动副;将第四连杆4作为机构的输出连杆,驱动副发生运动,使第四连杆4始终在球面上进行运动。转动副R1转动之后,第二连杆2发生运动,第三连杆3会随着第二连杆2运动,转动副R21转动之后,第六连杆6发生运动,第五连杆5会随着第六连杆6运动,最后使位于第三连杆3和第五连杆5之间的第四连杆4,即输出连杆发生运动,运动形式为绕着过第一球心O,在中间平面B上的任意的一条轴线进行连续转动,发生无伴随运动,输出连杆始终在以第一球心O为球心的球面上运动。
实施例3
本发明的第二方面采用的技术方案是,一种二自由度球面运动并联机构组成的多级并联机构,如图4和图5所示,其包括多个并联机构单元,且每个并联机构单元均包括第一连杆1、第二连杆2、第三连杆3、单元连接件7、第五连杆5和第六连杆6,相邻两个并联机构单元中,按照运动输出方向分为前级并联机构单元和后级并联机构单元,其中前级并联机构单元Ⅰ的第一连杆1的一端通过转动副一R1与第二连杆2一端连接,且第二连杆2的另一端通过转动副二R2与第三连杆3的一端连接,第三连杆3的另一端通过转动副三R3与单元连接件7的一端连接,且单元连接件7的另一端通过万向节一U1与第五连杆5的一端连接,第五连杆5的另一端通转动副四R4与第六连杆6的一端连接,且第六连杆6的另一端通过万向节二U2与第一连杆1的另一端连接,后级并联机构单元Ⅱ的第二连杆2的一端通过转动副五R5与前级并联机构单元Ⅰ的单元连接件7的一端连接,且第二连杆2的另一端通过转动副六R6与第三连杆3一端连接,第三连杆3的另一端通过转动副七R7与单元连接件7的一端连接,且单元连接件7的另一端通过万向节三U3与第五连杆5的一端连接,第五连杆5的另一端通转动副八R8与第六连杆6的一端连接,且第六连杆6的另一端通过万向节四U4与前级并联机构单元Ⅰ的单元连接件7的另一端连接,且前级并联机构单元Ⅰ的转动副三R3与后级并联机构单元Ⅱ的转动副五R5之间采用齿轮啮合驱动,且传动比为1,前级并联机构单元Ⅰ的万向节一U1的内侧转动副R11与后级并联机构单元Ⅱ的万向节四U4的内侧转动副R41之间采用齿轮啮合驱动,且传动比为1。相同的后级并联机构单元Ⅱ与下一级并联机构单元Ⅲ之间的连接方式和前级并联机构单元Ⅰ与后级并联机构单元Ⅱ之间的连接方式完全相同,并且能根据需要设置多个并联机构单元依次连接。
优选地,前级并联机构单元Ⅰ的转动副三R3与后级并联机构单元Ⅱ的转动副五R5之间亦可采用皮带传动,前级并联机构单元Ⅰ的万向节一U1的内侧转动副R11与后级并联机构单元Ⅱ的万向节四U4的内侧转动副R41之间亦可采用皮带传动。
本发明将相邻并联机构单元通过共用单元连接件7将多个并联机构单元连接组合,在机构运动过程中将前级并联机构单元Ⅰ的第二连杆2和第六连杆6作为机构输入连杆,即驱动连杆,第二连杆2和第六连杆6分别通过第三连杆3和第五连杆5使得单元连接件7的姿态发生变化,而前级并联机构单元Ⅰ的转动副三R3、万向节一U1的内侧转动副R11分别与后级并联机构单元Ⅱ的转动副五R5、万向节四U4的内侧转动副R41采用齿轮啮合驱动,进而将前级并联机构单元Ⅰ的运动传递至后级并联机构单元Ⅱ,依次传递直至传递至最上端的并联机构单元,进而使得最上端并联机构单元的单元连接件7,能满足大行程、大空间的运动要求。
以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。