一种基于双目视觉系统的离线示教系统
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及工业机器应用领域,尤其涉及一种基于双目视觉系统的离线示教系统。
背景技术
工业机器人是为了实现自动化生产,代替劳动者从事复杂、重复性劳动,在机器制造领域应用广泛。工业机器人在使用前需要进行示教。在工业机器应用领域,示教机器人是一件必须但效率低下的工作。机器人示教常见的是采用离线程序结合示教器,人工干预下是机器人运动轨迹达到加工要求。但使用示教器优化轨迹,对操作者的技能水平要求较高,人工示教花费的时间和精力较大,且人工示教仅凭肉眼观察和经验进行,示教精度低。
示教机器人主要完成的工作就是告诉机器人的工作路径,当前常用的方式是通过TPU示教器发送机器人指令到机器人,渐渐移动到指定的位置去示教。或者通过手动拖拽机械臂到指定的示教位置,然后再通过示教器记录当前位置。这两种方式效率都比较低下,尤其是结构复杂的工件,需要示教很多位置,稍有不慎就会反生碰撞事件。尤其是工件特别大时,拖拽示教更是行不通。
发明内容
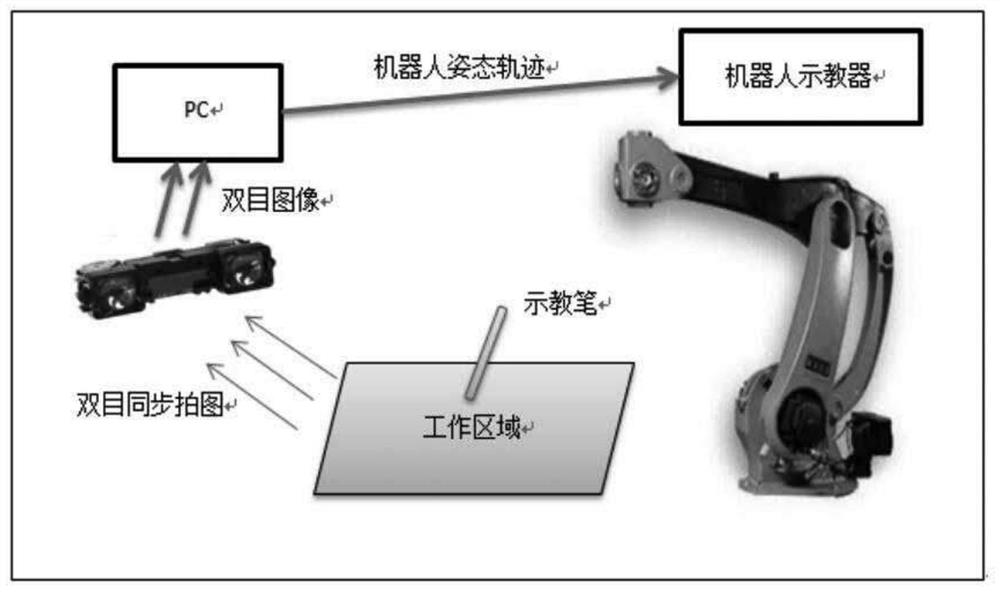
本发明的主要目的在于提出一种基于双目视觉系统的离线示教系统,其特征在于由机器人示教器、控制器、双目图像采集装置、示教笔组成,所述设置在工作区域内,所述工作区域内安装有双目图像采集装置,所述双目图像采集装置和控制器连接,所述控制器和机器人示教器连接。
基于双目视觉系统的离线示教系使用方法为:
1、示教笔在工作区域内的采点位置进行信号采集,将手持示教笔到采点位置,按下示教笔上的采集按钮触发采集信号;
2、双目图像采集装置接收到采集信号后,将采集到的信号传送给控制器,同时双目图像采集装置利用双目重建系统、控制器识别空间中姿态唯一性的示教笔,双目图像采集装置会重建每个led灯的空间位置,把识别到的灯珠的点云和注册时的点云进行匹配,从而推算出尖点的位置和姿态;示教笔注册时会得到示教笔的尖点Rv和led阵列也就是点云Rc,假如工作时得到的点云是Tc,通过匹配算法可以得出Rc到Tc的转换关系F,这个关系同样适合尖点,所以通过F和Rv可计算出工作时尖点位置Tv,尖点姿态也是同样步骤得出的;
3、然后控制器将上述步骤推算出的尖点的位置和姿态转化成机器人坐标并生成机器人行走路径,每一次触发或者每一次采集只能得到一个点和姿态,一个路径是由多个点和姿态组成的,有多少个点取决于用户的需求,当用户需求采集多个点时需要选择继续触发采集路径中的点,多点采集完毕后结束完成路径的采集,再将路径传递给机器人示教器。
4、使用时将机器人示教器。
所述示教笔上侧设置有led灯珠阵列。
所述双目图像采集装置利用3D视觉技术。
所述双目图像采集装置由安装架、安装板、摄像装置、移动槽、固定螺栓,所述安装架上侧安装有安装板,所述安装板上开设有移动槽,所述移动槽内安装有两个摄像装置,所述摄像装置下侧通过固定螺栓固定在安装板上。
本发明的有益效果为:本申请中设备的主要功能就是提高机器人的示教效率。本发明通过3D视觉技术,定位和追踪示教笔的标志点阵列,从而推算出示教笔尖点的空间位置和姿态,再将这些位置和姿态转换成相对机器人坐标系的路径,机器人就可以直接走到相应位置,在实示教过程中机器人或机械臂均不用进行移动,本申请可以独立完成,避免了示教过程中碰撞的发生。本申请的作用在于用来优化离线示教的路径,而不是创建离线示教路径。
本发明利用双目图像采集装置,识别空间中姿态唯一性的示教笔。示教笔有led灯珠阵列,这些阵列在三维空间中在x,y,z投影平面不是对称的,保存了空间点云方向的唯一性。双目图像采集装置会重建每个led灯的空间位置,把识别到的灯珠的点云和注册时的点云进行匹配,从而推算出尖点的位置和姿态。
本申请在使用时不需要机器移动,也不需要知道机器人要移动的大概路径。本申请使用时是和机器人是相对独立,本申请系统可安装在机器人的任何一侧,只要能看到机器人的工作区域即可以。使用时,先进行机器人和示教仪的手眼标定过程,然后在用机器人工具和示教笔示教同一姿态,之后就可以正常使用本申请了。本申请支持多种示教笔,任意符合要求的示教笔都可以通过视觉系统注册,下次加载只需在软件中调用即可。
附图说明
图1为本发明结构示意图。
图2为本发明使用流程图。
图3为本发明双目图像采集装置结构示意图。
具体实施方式
以下,根据试试例,对本申请进行阐述:
实施例1
本发明的为一种基于双目视觉系统的离线示教系统,由机器人示教器、控制器、双目图像采集装置、示教笔组成,设置在工作区域内,工作区域内安装有双目图像采集装置,双目图像采集装置和控制器连接,控制器和机器人示教器连接。示教笔上侧设置有led灯珠阵列。双目图像采集装置利用3D视觉技术。双目图像采集装置由安装架、安装板、摄像装置、移动槽、固定螺栓,所述安装架上侧安装有安装板,所述安装板上开设有移动槽,所述移动槽内安装有两个摄像装置,所述摄像装置下侧通过固定螺栓固定在安装板上。
实施例2
基于双目视觉系统的离线示教系使用方法为:
1、示教笔在工作区域内的采点位置进行信号采集,将手持示教笔到采点位置,按下示教笔上的采集按钮触发采集信号;
2、双目图像采集装置接收到采集信号后,将采集到的信号传送给控制器,同时双目图像采集装置利用双目重建系统、控制器识别空间中姿态唯一性的示教笔,双目图像采集装置会重建每个led灯的空间位置,把识别到的灯珠的点云和注册时的点云进行匹配,从而推算出尖点的位置和姿态;示教笔注册时会得到示教笔的尖点Rv和led阵列也就是点云Rc,假如工作时得到的点云是Tc,通过匹配算法可以得出Rc到Tc的转换关系F,这个关系同样适合尖点,所以通过F和Rv可计算出工作时尖点位置Tv,尖点姿态也是同样步骤得出的;
3、然后控制器将上述步骤推算出的尖点的位置和姿态转化成机器人坐标并生成机器人行走路径,每一次触发或者每一次采集只能得到一个点和姿态,一个路径是由多个点和姿态组成的,有多少个点取决于用户的需求,当用户需求采集多个点时需要选择继续触发采集路径中的点,多点采集完毕后结束完成路径的采集,再将路径传递给机器人示教器。
4、在示教过程中,本发明的离线示教系统和机器人是相对独立的,离线示教系统可安装在机器人的任何一侧,只要能看到机器人的工作区域即可以。使用时,先进行机器人和示教仪的手眼标定过程,然后在用机器人工具和示教笔示教同一姿态,之后就可以正常使用本系统了。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。