定位装置、定位方法及定位系统
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及基于从已经推定出位置的周边装置得到的信息推定位置的技术。
背景技术
位置信息被有效利用于导航和设备管理这样的服务中,价值提高。对于室外的定位而言,使用GPS(Global Positioning System:全球定位系统)的方式被广泛地普及。另一方面,对于人造卫星的电波无法到达的室内及地下的定位而言,提出了使用无线LAN(LocalArea Network:局域网)、Bluetooth(注册商标)、UWB(Ultra Wide Band:超宽带)、声波这样的介质的技术。
在该技术中,根据介质的特性或规格,使用利用定位装置发送的电波的电波强度(Received Signal Strength Indication,RSSI)推定距离的方式、和利用介质的到达时间(Time of Arrival,TOA)推定距离的方式,推定定位装置与定位对象之间的距离。而且,基于定位装置的位置和推定出的距离,推定定位对象的位置。
在室内及地下的位置推定中使用的介质的传输距离为数m~数十m左右。因此,在系统的应用目的地较广的情况下,需要设置多个定位装置。为了测定全部定位装置的位置并设定测定结果,需要大量的劳力。因此,期望定位装置的位置的测定及设定的自动化。
在专利文献1中记载了如下方法:利用位置为已知的定位装置推定位置为未知的定位装置的位置,并重复上述操作,直到全部定位装置的位置的推定结束。在专利文献2中记载了如下方法:使用位置为已知的标记(tag)和位置为未知的定位装置,设定定位装置的位置。
在先技术文献
专利文献
专利文献1:日本特开2010-151807号公报
专利文献2:日本特开2010-175536号公报
发明内容
发明要解决的课题
专利文献1、2记载的方法是推定定位装置的位置并设定定位装置的位置的方法。在专利文献1、2中,由于没有考虑在位置的推定中产生的误差,所以定位装置越重复进行位置的推定,越累积误差。对于使用累积的误差较大的定位装置构造的定位系统而言,位置的推定的可靠性较低。
本发明的目的在于减小在位置的推定中产生的误差。
用于解决课题的手段
本发明的定位装置具备:
通信部,所述通信部将存在于周边的位置为已知的多个周边装置分别作为对象,并从作为对象的周边装置接收所述作为对象的周边装置的位置;
装置选择部,所述装置选择部基于利用位置精度和距离精度计算的关于所述作为对象的周边装置的综合精度,选择所述多个周边装置中的要利用的一个以上周边装置,所述位置精度是利用所述通信部从所述作为对象的周边装置接收到的所述位置的精度,所述距离精度是到所述作为对象的周边装置的距离的精度;以及
位置推定部,所述位置推定部基于从利用所述装置选择部选择的周边装置接收到的所述位置和到选择的周边装置的距离,推定位置。
发明的效果
在本发明中,在基于利用位置精度及距离精度计算的关于作为对象的周边装置的综合精度选择要利用的周边装置后,推定位置。由此,能够减小在位置的推定中产生的误差。
附图说明
图1是实施方式1的定位系统100的结构图。
图2是实施方式1的定位装置10的结构图。
图3是示出实施方式1的定位系统100的结构例的图。
图4是示出实施方式1的作为推定位置的对象的定位装置10的周边的定位装置10的工作的流程图。
图5是示出实施方式1的作为推定位置的对象的定位装置10的工作的流程图。
图6是在实施方式1的定位系统100中按顺序推定定位装置10的位置的工作例的说明图。
图7是在实施方式1的定位系统100中按顺序推定定位装置10的位置的工作的处理流程图。
图8是实施方式1的一个定位装置10的处理的流程图。
图9是实施方式1的位置精度的计算处理的流程图。
图10是实施方式1的基于位置为已知的定位装置10与位置为未知的定位装置10的位置关系的距离精度的不同的说明图。
图11是变形例2的定位装置10的结构图。
图12是在实施方式2的定位系统100中选择在位置的推定中利用的周边装置的工作例的说明图。
图13是实施方式3的定位装置10的结构图。
图14是在实施方式3的定位系统100中选择在位置的推定中利用的周边装置的工作例的说明图。
图15是实施方式4的定位装置10的结构图。
图16是在实施方式4的定位系统100中选择在位置的推定中利用的周边装置的工作例的说明图。
具体实施方式
实施方式1.
***结构的说明***
参照图1说明实施方式1的定位系统100的结构。
定位系统100具备多个定位装置10。多个定位装置10在配置于附近的情况下,能够利用无线LAN、Bluetooth(注册商标)、UWB这样的方法进行通信。
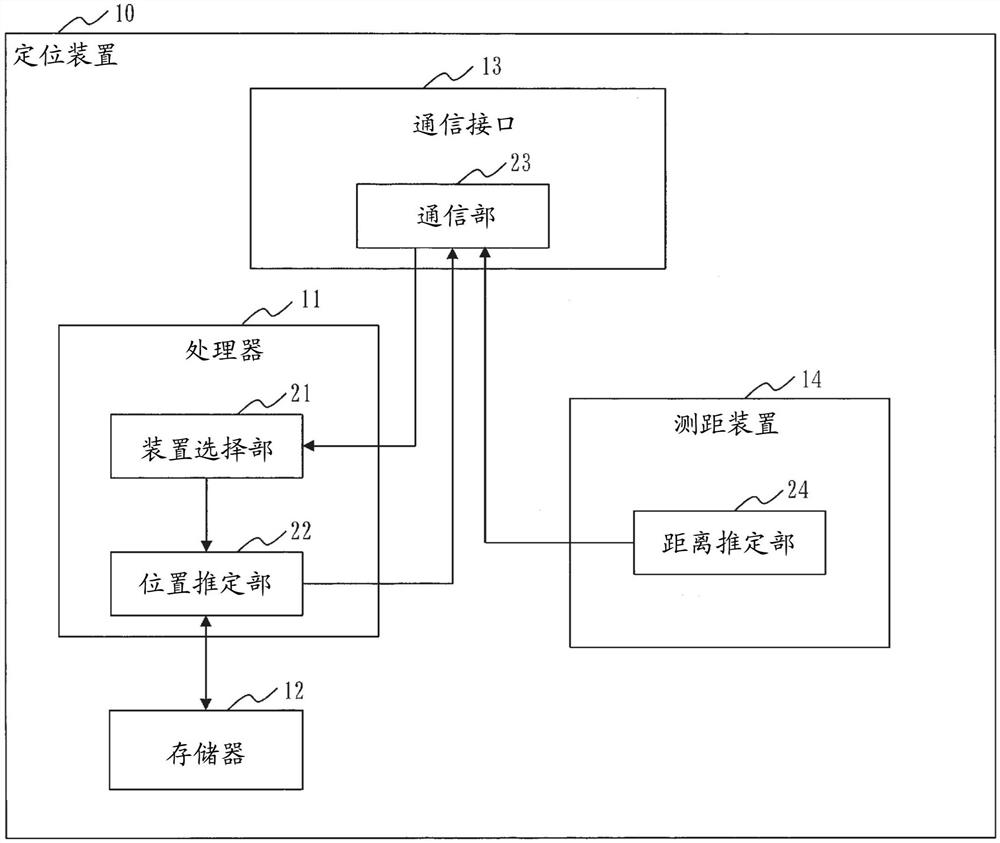
参照图2说明实施方式1的定位装置10的结构。
定位装置10是计算机。
定位装置10具备处理器11、存储器12、通信接口13及测距装置14这些硬件。处理器11经由信号线与其他硬件连接,并控制上述其他硬件。
处理器11是进行处理的IC(Integrated Circuit:集成电路)。作为具体例,处理器11是CPU(Central Processing Unit:中央处理单元)、DSP(Digital Signal Processor:数字信号处理器)、GPU(Graphics Processing Unit:图形处理单元)。
存储器12是存储数据的存储装置。作为具体例,存储器12是SRAM(Static RandomAccess Memory:静态随机存取存储器)、DRAM(Dynamic Random Access Memory:动态随机存取存储器)。存储器12可以是SD(注册商标,Secure Digital)存储卡、CF(CompactFlash,注册商标)、NAND闪存、软盘、光盘、高密度磁盘、蓝光(注册商标)盘、DVD(DigitalVersatile Disk:数字多功能盘)这样的可移动记录介质。
通信接口13是用于与外部的装置进行通信的接口。作为具体例,通信接口13是Ethernet(注册商标)、USB(Universal Serial Bus:通用串行总线)、HDMI(注册商标,High-Definition Multimedia Interface)的端口。
测距装置14是测量到其他定位装置10的距离的装置。作为具体例,测距装置14是UWB收发器、麦克风及扬声器这样的装置。
作为功能构成要素,定位装置10具备装置选择部21、位置推定部22、通信部23及距离推定部24。装置选择部21及位置推定部22的功能利用处理器11实现。通信部23的功能利用通信接口13实现。距离推定部24的功能利用测距装置14实现。
装置选择部21及位置推定部22的功能利用软件实现。在存储器12中存储有实现装置选择部21及位置推定部22的功能的程序。该程序由处理器11读入并执行。由此,实现装置选择部21及位置推定部22的功能。
此外,通信部23及距离推定部24的功能也可以与装置选择部21及位置推定部22的功能同样地利用软件实现。
在图1中,仅示出一个处理器11。但是,处理器11可以是多个,多个处理器11可以协作地执行实现各功能的程序。
***工作的说明***
参照图3至图10,说明实施方式1的定位系统100的工作。
实施方式1的定位系统100的工作相当于实施方式1的定位方法。另外,实施方式1的定位系统100的工作相当于实施方式1的定位程序的处理。
参照图3至图5,说明实施方式1的定位系统100的定位处理。
在图3中,定位系统100具备定位装置10(a)至定位装置10(e)这5台定位装置10。
在此,说明推定定位装置10(e)的位置的例子。设为定位装置10(a)至定位装置10(d)的位置为已知。位置为已知是指利用以下说明的方法推定了位置或者利用手动操作这样的某些方法确定了位置。在位置为已知的定位装置10(a)至定位装置10(d)的存储器12中,存储有自身的位置、作为位置的精度的位置精度。另外,设为定位装置10(a)至定位装置10(d)位于定位装置10(e)的通信部23的通信范围内。
参照图4,说明定位装置10(a)至定位装置10(d)这些各定位装置10的工作。
在步骤S101中,距离推定部24推定到作为推定位置的对象的定位装置10(e)的距离。此时,距离推定部24可以与定位装置10(e)的距离推定部24协作地推定距离。具体而言,距离推定部24使用无线LAN、Bluetooth(注册商标)、UWB、声波这样的介质,利用RSSI方式、TOA方式这样的方式距离被推定。此外,距离推定部24可以通过AOA(Angle of Arrival:到达角)方式等推定定位装置10(e)的方位。
在步骤S102中,距离推定部24基于推定出的距离的长度、推定距离时的S/N(Signal-to-Noise)比这样的噪音的大小、介质的信号强度及多路径的有无这样的物理条件,计算作为推定出的距离的精度的距离精度。距离推定部24将距离精度与在步骤S101中推定出的距离一起发送至通信部23。
在步骤S103中,位置推定部22读出存储于存储器12的位置及位置精度,并发送至通信部23。
在步骤S104中,通信部23将在步骤S103中发送的位置及位置精度和在步骤S102中发送的距离及距离精度发送至定位装置10(e)。
参照图5说明定位装置10(e)的工作。
在步骤S201至步骤S203中,通信部23将位于通信范围内的已经推定出位置的定位装置10(a)至定位装置10(d)分别设定成作为对象的周边装置。通信部23从各作为对象的周边装置接收作为对象的周边装置的位置及位置精度、和与作为对象的周边装置的距离及距离精度。通信部23将接收到的位置及位置精度、和距离及距离精度发送至装置选择部21。
通信部23向装置选择部21发送完全部作为对象的周边装置的位置及位置精度、和距离及距离精度时,使处理进入步骤S204。
在步骤S204中,装置选择部21针对各作为对象的周边装置,利用从该作为对象的周边装置接收到的位置精度及距离精度,计算关于该周边装置的综合精度。装置选择部21基于计算得到的综合精度,选择多个周边装置中的要利用的一个以上周边装置。
具体而言,装置选择部21按综合精度从高到低的顺序,选择位置推定部22为了推定位置而所需的数量的周边装置。为了推定位置而所需的数量根据定位方式而不同。作为具体例,在定位方式为TOA方式的情况下,需要3个位置为已知的定位装置10。因此,为了推定位置而所需的数量成为3。也就是说,在定位方式为TOA方式的情况下,装置选择部21按综合精度从高到低的顺序,选择定位装置10(a)至定位装置10(d)中的3个定位装置10。
在步骤S205中,位置推定部22基于从在步骤S204中选择的周边装置接收到的位置及距离,推定定位装置10(e)的位置。另外,位置推定部22基于从在步骤S204中选择的一个以上周边装置接收到的位置精度及距离精度,计算作为推定出的位置的精度的位置精度。
在步骤S206中,位置推定部22将在步骤S205中推定出的定位装置10(e)的位置和在步骤S205中计算得到的关于定位装置10(e)的位置精度写入存储器12。
参照图6及图7,说明在实施方式1的定位系统100中按顺序推定定位装置10的位置的工作例。
在图6中,定位系统100具备定位装置10(a)至定位装置10(h)。定位装置10(a)至定位装置10(c)的位置为已知。定位装置10(a)至定位装置10(c)在定位装置10(d)至定位装置10(g)的通信部23的通信范围内,且在定位装置10(h)的通信部23的通信范围外。定位装置10(d)至定位装置10(g)在定位装置10(h)的通信部23的通信范围内。
在此,设为为了推定位置而所需的定位装置10的数量为3。位置精度及距离精度的值越小,意味着精度越高。此外,在图6中,各定位装置10的附图标记之上示出的数值表示该定位装置10的位置精度。
首先,作为第一级,推定定位装置10(a)至定位装置10(c)位于通信范围内的定位装置10(d)至定位装置10(g)的位置。在此,以定位装置10(d)为例进行说明。
定位装置10(d)将位于通信范围内且位置为已知的定位装置10(a)至定位装置10(c)设为作为对象的周边装置,并向作为对象的周边装置发送推定开始请求。于是,定位装置10(a)至定位装置10(c)发送针对推定开始请求的响应,并进行到定位装置10(d)的距离的推定。而且,定位装置10(a)至定位装置10(c)将位置及位置精度、和距离及距离精度发送至定位装置10(d)。
对于定位装置10(d)而言,作为对象的周边装置的数量与为了推定位置而所需的定位装置10的数量相同,为3个。因此,定位装置10(d)选择定位装置10(a)至定位装置10(c)。
定位装置10(d)基于从定位装置10(a)至定位装置10(c)发送来的位置及距离推定位置。另外,定位装置10(d)基于从定位装置10(a)至定位装置10(c)发送来的位置精度及距离精度,计算作为推定出的位置的精度的位置精度。在图6中,定位装置10(a)、定位装置10(b)及定位装置10(c)的位置精度均为0。另外,定位装置10(a)与定位装置10(d)之间的距离精度、定位装置10(b)与定位装置10(d)之间的距离精度及定位装置10(c)与定位装置10(d)之间的距离精度均为1。因此,例如,定位装置10(d)将从定位装置10(a)至定位装置10(c)接收到的位置精度及距离精度合计,将位置精度计算为3。
定位装置10(e)至定位装置10(g)也进行与定位装置10(d)相同的处理。结果,推定定位装置10(e)至定位装置10(g)的位置,并计算推定出的位置的位置精度。在图6中,关于定位装置10(e)及定位装置10(f),位置精度均计算为3,关于定位装置10(g),位置精度计算为4。由于定位装置10(c)与定位装置10(g)之间的距离精度与其他距离精度不同,为2,所以关于定位装置10(g)的位置精度与其他不同,成为4。
接着,作为第二级,推定定位装置10(a)至定位装置10(c)不在通信范围内的定位装置10(h)的位置。
定位装置10(h)将位于通信范围内且位置为已知的定位装置10(d)至定位装置10(g)设为作为对象的周边装置,并向作为对象的周边装置发送推定开始请求。于是,定位装置10(d)至定位装置10(g)发送针对推定开始请求的响应,并进行到定位装置10(h)的距离的推定。而且,定位装置10(d)至定位装置10(g)将位置及位置精度、和距离及距离精度发送至定位装置10(h)。
定位装置10(h)针对定位装置10(d)至定位装置10(g)分别根据位置精度及距离精度计算综合精度。在此,定位装置10(h)将位置精度及距离精度的合计作为综合精度进行处理。在图6中,定位装置10(d)、定位装置10(e)及定位装置10(f)的综合精度为4,定位装置10(g)的综合精度为5。因此,定位装置10(h)选择定位装置10(d)、定位装置10(e)及定位装置10(f)。
定位装置10(h)基于从定位装置10(d)至定位装置10(f)发送来的位置及距离推定位置。另外,定位装置10(h)基于从定位装置10(d)至定位装置10(f)发送来的位置精度及距离精度,计算作为推定出的位置的精度的位置精度。在图6中,定位装置10(d)、定位装置10(e)及定位装置10(f)的位置精度均为3。另外,定位装置10(d)与定位装置10(h)之间的距离精度、定位装置10(e)与定位装置10(h)之间的距离精度及定位装置10(f)与定位装置10(h)之间的距离精度均为1。因此,例如,定位装置10(h)将从定位装置10(d)至定位装置10(f)接收到的位置精度及距离精度合计,将位置精度计算为12。
如以上那样,只要存在位置为未知的定位装置10,就重复执行位置的推定处理,依次推定定位装置10的位置。
参照图8,说明实施方式1的一个定位装置10的处理。
在步骤S301中,通信部23接收推定开始请求。在步骤S302中,位置推定部22判定位置是否为已知。也就是说,位置推定部22通过人工等确定位置,或者,判定是否已经完成位置的推定。位置推定部22在位置为未知的情况下,使处理进入步骤S303。另一方面,位置推定部22在位置为已知的情况下,使处理进入步骤S311。
在步骤S303中,通信部23为了推定位置而对周围的定位装置10发送推定开始请求。于是,测定开始请求由周边装置接收,所述周边装置是位于通信范围内的周围的定位装置10。在步骤S304中,通信部23从作为接收到推定开始请求的周围的定位装置10的周边装置接收响应。
在步骤S305至步骤S307中,通信部23从作为在步骤S304中接收到的响应的发送源的各周边装置接收位置及位置精度、和距离及距离精度。
在步骤S308中,装置选择部21选择要利用的周边装置。在步骤S309中,位置推定部22基于从在步骤S308中选择的周边装置接收到的位置及距离,推定位置。在步骤S310中,位置推定部22基于从在步骤S308中选择的周边装置接收到的位置精度及距离精度,计算在步骤S310中推定出的位置的位置精度。
在步骤S311中,通信部23发送针对在步骤S301中接收到的推定开始请求的响应。在步骤S312中,距离推定部24推定到作为在步骤S301中接收到的推定开始请求的发送源的定位装置10的距离。另外,距离推定部24计算推定出的距离的距离精度。在步骤S313中,通信部23将位置及位置精度、在步骤S312中推定出的距离以及在步骤S312中计算得到的距离精度发送至作为在步骤S301中接收到的推定开始请求的发送源的定位装置10。
参照图9说明实施方式1的位置精度的计算处理。
在步骤401中,位置推定部22参照在位置的推定时利用的各周边装置的位置的位置精度。在步骤S402中,位置推定部22参照与在位置的推定时利用的各周边装置之间的距离的距离精度。
在步骤S403中,位置推定部22基于关于在步骤S401中参照的各周边装置的位置精度、关于在步骤S402中参照的各周边装置的距离精度,计算关于自身的位置的位置精度。作为具体例,将关于各周边装置的位置精度及距离精度之和计算为关于自身的位置的位置精度。
此时,位置推定部22可以利用与在位置的推定时利用的各周边装置之间的距离的长度、推定距离时利用的介质的噪音这样的物理信息,对利用位置精度及距离精度得到的值进行加权,并计算位置精度。作为具体例,位置推定部22利用物理信息对关于各周边装置的位置精度及距离精度之和进行加权,并计算为关于自身的位置的位置精度。
参照图10,说明基于位置为已知的定位装置10与位置为未知的定位装置10的位置关系的距离精度的不同。
原则上,定位装置10间的距离越大,则距离的推定中的误差变得越大。因此,原则上,优选利用接近位置为未知的定位装置10的、位置为已知的定位装置10进行位置的推定。
在图10中,定位系统100具备定位装置10(a)至定位装置10(e)。定位装置10(a)至定位装置10(d)的位置为已知。定位装置10(e)的位置为未知。在此,设为为了推定位置而所需的定位装置10的数量为3。因此,在推定定位装置10(e)的位置时,利用定位装置10(a)至定位装置10(d)这4个定位装置10中的3个。
在此,原则上,定位装置10间的距离越大,则距离精度变得越大。但是,根据噪音这样的其他要素的不同,有时不成为这样。在图10中,定位装置10(d)最接近定位装置10(e),定位装置10(a)及定位装置10(c)次接近定位装置10(e),定位装置10(b)距定位装置10(e)最远。而且,定位装置10(d)与定位装置10(e)之间的距离精度为2,定位装置10(a)与定位装置10(e)之间的距离精度、定位装置10(c)与定位装置10(e)之间的距离精度为3,定位装置10(b)与定位装置10(e)之间的距离精度为4。
因此,假如定位装置10(a)至定位装置10(d)的位置精度相同,则利用定位装置10(a)、定位装置10(c)及定位装置10(d)进行位置的推定。也就是说,利用距离较近的定位装置10。
***实施方式1的效果***
如以上那样,实施方式1的定位系统100在基于利用位置精度及距离精度计算的关于定位装置10的综合精度选择要利用的定位装置10后,推定位置。由此,能够减小在位置的推定中产生的误差。
特别是由于使用位置精度计算综合精度,所以利用位置包含的误差较小的定位装置10。另外,由于使用距离精度计算综合精度,所以利用距离较近这样的距离的推定所包含的误差较小的定位装置10。结果,能够减小在位置的推定中产生的误差。
***其他结构***
<变形例1>
在实施方式1中,位置为已知的定位装置10的距离推定部24推定到作为推定位置的对象的定位装置10的距离,并发送至作为推定位置的对象的定位装置10。但是,也可以是,作为推定位置的对象的定位装置10的距离推定部24推定到位置为已知的定位装置10的距离。在该情况下,作为推定位置的对象的定位装置10的距离推定部24也计算距离精度。
而且,在该情况下,在图5的步骤S201至步骤S203中,通信部23从作为对象的周边装置仅接收位置及位置精度。在图5的步骤S204中,装置选择部21针对各作为对象的周边装置,基于从该作为对象的周边装置接收到的位置精度、针对该作为对象的周边装置利用距离推定部24计算得到的距离精度,计算该作为对象的周边装置的综合精度。在图5的步骤S205中,位置推定部22根据从在步骤S204中选择的周边装置接收到的位置、和针对在步骤S204中选择的周边装置利用距离推定部24计算得到的距离,推定位置。
<变形例2>
在实施方式1中,用软件实现装置选择部21及位置推定部22的功能。但是,作为变形例2,装置选择部21及位置推定部22的功能也可以用硬件实现。关于该变形例2,说明与实施方式1不同的点。
参照图11说明变形例2的定位装置10的结构。
在用硬件实现装置选择部21及位置推定部22的功能的情况下,定位装置10具备电子电路15代替处理器11。电子电路15是实现装置选择部21及位置推定部22的功能的专用电路。
作为电子电路15,设想了单一电路、复合电路、程序化的处理器、并联程序化的处理器、逻辑IC、GA(Gate Array:门阵列)、ASIC(Application Specific IntegratedCircuit:专用集成电路)、FPGA(Field-Programmable Gate Array:现场可编程门阵列)。
可以用一个电子电路15实现各功能构成要素,也可以使各功能构成要素分散于多个电子电路15来实现。
<变形例3>
作为变形例3,可以一部分各功能构成要素用硬件实现,其他各功能构成要素用软件实现。
将处理器11和电子电路15称为处理电路。也就是说,各功能构成要素的功能利用处理电路实现。
实施方式2.
实施方式2在利用作为对象的周边装置的位置相对于基准位置的差值计算综合精度这一点与实施方式1不同。在实施方式2中,说明该不同的点,对于相同的点,省略说明。
周边装置中的通信部23在发送位置及位置精度、和距离及距离精度时,也发送相对于基准位置的位置的差值。推定位置的定位装置10中的装置选择部21根据位置精度、距离精度及差值计算综合精度。作为具体例,装置选择部21对于利用位置精度及距离精度得到的值,利用差值进行加权并计算综合精度。
在此,作为具体例,基准位置是人工设定的位置这样的精度较高的位置。越远离基准位置,位置的精度变得越低的可能性高。因此,以越远离基准位置精度变得越低的方式计算综合精度。也就是说,差值越大,综合精度变得越低。
参照图12,说明在实施方式2的定位系统100中选择在位置的推定中利用的周边装置的工作例。
在图12中,定位装置10(a)的位置设定为基准位置。定位装置10(e)的推定出的位置在x轴方向上与基准位置相距2,在y轴方向上与基准位置相距1。因此,定位装置10(e)在发送位置及位置精度、和距离及距离精度时,例如发送3(=2+1)作为差值。定位装置10(f)从定位装置10(e)接收到位置及位置精度、距离及距离精度、和作为差值的值3。在该情况下,例如,对作为定位装置10(e)的位置精度的3与作为距离精度的1合计而成的值4乘以作为差值的值3,计算出综合精度为12。
如以上那样,实施方式2的定位系统100利用作为对象的周边装置的位置相对于基准位置的差值计算综合精度。因此,更准确地计算综合精度。结果,能够选择适当的周边装置并减小在位置的推定中产生的误差。
实施方式3.
实施方式3在定位装置10移动这一点与实施方式1、2不同。在实施方式3中,说明该不同的点,对于相同的点,省略说明。
在此,说明在实施方式1中追加功能的情况。但是,也能够在实施方式2中追加功能。
参照图13说明实施方式3的定位装置10的结构。
定位装置10具备加速度传感器16作为硬件。加速度传感器16是检测定位装置10的加速度的传感器。定位装置10具备移动量测量部25作为机构构成要素。移动量测量部25的功能利用加速度传感器16实现。
在实施方式1、2中,在设置定位装置10的情况下,进行位置的推定。在实施方式3中,定位装置10移动。因此,定位装置10不仅在设置时,在满足条件的情况下也进行位置的推定。
具体而言,移动量测量部25测量定位装置10的移动量并写入存储器12。移动量测量部25在推定位置起的移动量大于阈值的情况下,判定为需要进行位置的再推定。在利用移动量测量部25判定为需要进行位置的再推定的情况下,通信部23对周围的定位装置10发送推定开始请求,从作为接收到推定开始请求的周围的定位装置10的周边装置再接收位置及位置精度、和距离及距离精度。当利用通信部23再接收位置及位置精度和距离及距离精度时,装置选择部21再选择要利用的一个以上周边装置。当利用装置选择部21再选择要利用的周边装置时,位置推定部22基于从再选择的周边装置接收到的位置及距离再推定位置。另外,位置推定部22根据从再选择的周边装置接收到的位置精度及距离精度再计算位置精度。
越是定位装置10的移动量多而推定次数增加,推定出的位置的位置精度有可能变得越低。因此,周边装置中的通信部23在发送位置及位置精度、和距离及距离精度时,也发送定位装置10的移动量。推定位置的定位装置10中的装置选择部21根据位置精度、距离精度及移动量计算综合精度。作为具体例,装置选择部21对于利用位置精度及距离精度得到的值,利用移动量进行加权并计算综合精度。
此外,在此,发送的移动量可以是设置定位装置10后的移动量的合计,也可以是设置定位装置10后的每单位时间的移动量。
参照图14,说明在实施方式3的定位系统100中选择在位置的推定中利用的周边装置的工作例。
定位装置10(e)的移动量为5。因此,定位装置10(e)在发送位置及位置精度、和距离及距离精度时,发送5作为移动量。定位装置10(f)从定位装置10(e)接收到位置及位置精度、距离及距离精度、和作为移动量的值5。在该情况下,例如,对作为定位装置10(e)的位置精度的3与作为距离精度的1合计而成的值4乘以作为差值的值5,计算出综合精度为20。
如以上那样,实施方式3的定位系统100在移动量大于阈值的情况下,再推定位置。因此,能够始终将定位装置10的位置的误差抑制在某种程度的范围内。
另外,实施方式3的定位系统100利用定位装置10的移动量计算综合精度。因此,更准确地计算综合精度。结果,能够选择适当的周边装置并减小在位置的推定中产生的误差。
此外,在上述说明中,在移动量大于阈值的情况下,再推定位置。但是,也可以以一定的时间间隔再推定位置。也就是说,也可以是,位置推定部22预先测量推定位置后的经过时间,如果经过时间超过基准时间,则再推定位置。
另外,在上述说明中,由于越是定位装置10的移动量多而推定次数增加,有可能变得越低,所以基于设置定位装置10后的移动量的合计等计算综合精度。但是,当最近的位置推定后的移动量较大时,定位装置10位于从推定出的位置的偏移的位置的可能性较高。因此,也可以基于最近的位置推定后的移动量计算综合精度。
实施方式4.
实施方式4在利用从周边装置到障碍物的距离计算综合精度这一点与实施方式1~3不同。在实施方式4中,说明该不同的点,对于相同的点,省略说明。
在此,说明在实施方式1中追加功能的情况。但是,也能够在实施方式2、3中追加功能。
参照图15说明实施方式4的定位装置10的结构。
定位装置10具备物体传感器17作为硬件。物体传感器17是测量到存在于定位装置10的周边的墙壁及天花板这样的障碍物的距离的传感器。作为具体例,物体传感器17是红外线传感器或声波传感器。定位装置10具备障碍物检测部26作为机构构成要素。障碍物检测部26的功能利用物体传感器17实现。
障碍物检测部26测量到存在于定位装置10的周边的障碍物的距离。周边装置中的通信部23在发送位置及位置精度、和距离及距离精度时,也发送到障碍物的距离。在周边存在多个障碍物的情况下,发送到最接近周边装置的障碍物的距离。推定位置的定位装置10中的装置选择部21根据位置精度、距离精度及到障碍物的距离计算综合精度。作为具体例,装置选择部21对于利用位置精度及距离精度得到的值,利用到障碍物的距离进行加权并计算综合精度。
在距离推定部24推定距离的情况下使用的电波及声波这样的介质在墙壁及天花板这样的障碍物处反射。因此,除了到作为距离的推定对象的定位装置10的最短距离的推定结果之外,有时还能够得到与介质在障碍物处反射的路径相关的距离的推定结果。因此,在定位装置10的附近有障碍物的情况下,定位装置10的位置有可能包含误差。因此,以到障碍物的距离越近精度变得越低的方式计算综合精度。
参照图16,说明在实施方式4的定位系统100中选择在位置的推定中利用的周边装置的工作例。
在图16中,在定位装置10(d)的附近有墙壁。设为从定位装置10(d)到墙壁的距离为2。因此,定位装置10(d)在发送位置及位置精度、和距离及距离精度时,发送2作为到障碍物的距离。定位装置10(e)从定位装置10(d)接收到位置及位置精度和距离及距离精度、作为到障碍物的距离的值2。在该情况下,例如,对作为定位装置10(d)的位置精度的3与作为距离精度的1合计而成的值4乘以作为值2的倒数的值1/2,计算出综合精度为2,所述值2是到障碍物的距离。
如以上那样,在实施方式4的定位系统100中,利用从周边装置到障碍物的距离计算综合精度。因此,更准确地计算综合精度。结果,能够选择适当的周边装置而减小在位置的推定中产生的误差。
附图标记的说明
10定位装置,11处理器,12存储器,13通信接口,14测距装置,15电子电路,16加速度传感器,17物体传感器,21装置选择部,22位置推定部,23通信部,24距离推定部,25移动量测量部,26障碍物检测部,100定位系统。
- 使用绝对定位系统及相对定位系统来确定位置的定位装置及方法、计算机程序及数据载体
- 水下定位装置、水面定位装置及定位系统