一种教学机器人及其控制系统
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及机器人技术领域,尤其涉及一种教学机器人及其控制系统。
背景技术
机器人是一种能够半自主或全自主工作的智能机器。历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围随着人工智能技术、计算机技术等相关技术的发展,对智能机器人的研究越来越多。
在教育领域,许多院校已在学生中开设了机器人学方面的有关课程,为了满足机器人学方面的有关课程教学示范和实验教学的需求,相关的教学机器人设备是否符合教学需求显得尤为重要,而机器人使用时需要进行移动以及一定的内存储电,由于机器人各个模块均需要进行电量,导致电耗快,机器人的使用持久性不佳。
因此,有必要提供一种新的教学机器人及其控制系统解决上述技术问题。
发明内容
为解决上述技术问题,本发明提供一种教学机器人及其控制系统。
本发明提供的教学机器人及其控制系统包括:底座和承载板,所述底座上安装有用于控制机器人行动的控制箱以及移动的滚动轮,且底座通过支撑架固定架设有安装板,所述安装板上安装有蓄电箱,且蓄电箱内设有储电机构,所述承载板通过调节机构安装在安装板上,且承载板上安装有机器人的头体。
优选的,所述储电机构包括发电机、支撑板、联动齿轮、驱动齿轮和摇杆,所述发电机和支撑板均固定安装在蓄电箱内,且发电机的输入轴与支撑板上的转动轴固定连接,所述联动齿轮固定安装在转动轴上,且联动齿轮与支撑板上安装的驱动齿轮啮合连接,所述驱动齿轮的转动中心固定安装有摇杆。
优选的,用于驱动所述摇杆旋转的驱动机构安装在滚动轮的转轴上,且驱动机构包括凸轮和驱动杆,所述凸轮固定安装在滚动轮的转轴上,且凸轮偏离圆心处的转动杆上套接有转动连接的驱动杆,所述驱动杆的另一端穿过安装板开设的滑动腔并与摇杆的连接端转动连接。
优选的,所述调节机构包括安装块、安装腔、丝杆、升降板、提升柱、从动齿轮、主动齿轮和驱动电机,所述安装块固定安装在蓄电箱的后方,且安装块上开设有安装腔,所述安装腔内安装有两组转动连接的丝杆,且两根丝杆之间架设有螺纹连接的升降板,所述升降板的上表面固定安装有多根等高的提升柱,且每一根提升柱均贯穿安装块的顶壁并与承载板的下表面固定连接,两根所述丝杆的底部均固定套接有从动齿轮,且两个从动齿轮之间的安装腔内安装有转动连接的主动齿轮,所述主动齿轮分别与两侧的从动齿轮啮合连接,且主动齿轮的转动中心与驱动电机的输出端固定连接,所述驱动电机固定安装在安装板的下表面。
优选的,所述承载板的前端面固定安装有显示屏,所述头体的眼槽处安装有投影仪。
优选的,所述头体的顶部安装有摆动机构,且摆动机构包括立杆、弹簧和钢球,所述立杆固定安装在头体的顶部,且立杆的顶端通过弹簧弹性连接有钢球。
优选的,所述底座的前端面安装有转动连接的转动小滚轮。
优选的,学机器人的控制系统,其中,控制箱分别与储电机构、调节机构电性连接,所述控制箱内的控制器还连接有储存模块、定位模块、声音检测模块,所述储存模块用于储存身体调节机构设定的高度,所述定位模块用于机器人自主判断障碍并通过,所述声音检测模块用于测量音频信号、捕获音频信号及检测声音强度。
与相关技术相比较,本发明提供的教学机器人及其控制系统具有如下有益效果:
1、本发明教学机器人在进行移动时,滚动轮旋转从而转轴上的凸轮随之旋转,并驱动驱动杆摇动摇杆旋转,旋转的摇杆带动驱动齿轮转动,因此与之啮合连接的联动齿轮驱动发电机进行蓄电工作,从而教学机器人在行驶过程中不断进行电能储备,提高了教学机器人的经济效益性以及工作时间的持久性;
2、本发明而开启驱动电机使得升降板沿着丝杆进行升降式调节,从而承载板上机器人的头体以及显示屏得以高度调节,便于学习人员可以更好的进行观测。
附图说明
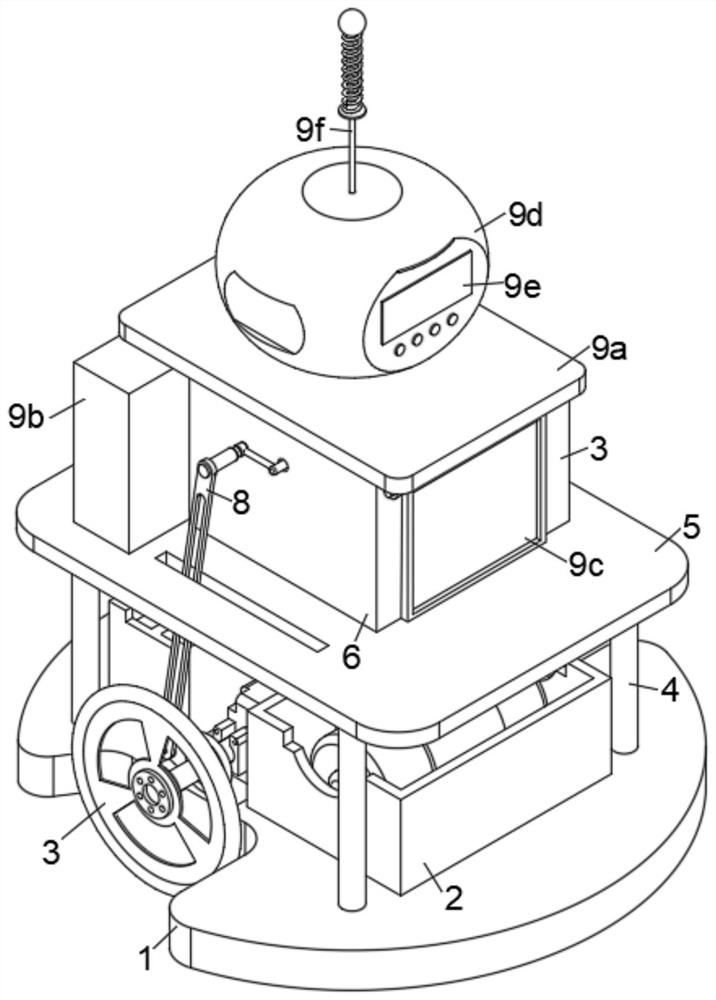
图1为本发明提供的教学机器人及其控制系统的一种较佳实施例的结构示意图之一;
图2为图1所示蓄电箱内储电机构的结构示意图;
图3为图1所示驱动机构的安装结构示意图;
图4为图3所示A处的放大结构示意图;
图5为图3所示调节机构的结构示意图;
图6为图3所示摆动机构的结构示意图;
图7为本发明提供的教学机器人及其控制系统的一种较佳实施例的结构示意图之二。
图中标号:1、底座,2、控制箱,3、滚动轮,4、支撑架,5、安装板,6、蓄电箱,7、储电机构,71、发电机,72、支撑板,73、联动齿轮,74、驱动齿轮,75、摇杆,8、驱动机构,81、凸轮,82、驱动杆,9、滑动腔,9a、承载板,9b、调节机构,91b、安装块,92b、安装腔,93b、丝杆,94b、升降板, 95b、提升柱,96b、从动齿轮,97b、主动齿轮,98b、驱动电机,9c、显示屏, 9d、头体,9e、投影仪,9f、摆动机构,91f、立杆,92f、弹簧,93f、钢球。
具体实施方式
下面结合附图和实施方式对本发明作进一步说明。
请结合参阅图1至图7,其中,图1为本发明提供的教学机器人及其控制系统的一种较佳实施例的结构示意图之一;图2为图1所示蓄电箱内储电机构的结构示意图;图3为图1所示驱动机构的安装结构示意图;图4为图3所示 A处的放大结构示意图;图5为图3所示调节机构的结构示意图;图6为图3 所示摆动机构的结构示意图;图6为本发明提供的教学机器人及其控制系统的一种较佳实施例的结构示意图之二。包括:底座1和承载板9a。
在具体实施过程中,如图1、图2、图3和图4所示,底座1上安装有用于控制机器人行动的控制箱2以及移动的滚动轮3,且底座1通过支撑架4固定架设有安装板5,安装板5上安装有蓄电箱6,且蓄电箱6内设有储电机构7,而储电机构7包括发电机71、支撑板72、联动齿轮73、驱动齿轮74和摇杆75,发电机71和支撑板72均固定安装在蓄电箱6内,且发电机71的输入轴与支撑板72上的转动轴固定连接,联动齿轮73固定安装在转动轴上,且联动齿轮73与支撑板72上安装的驱动齿轮74啮合连接,驱动齿轮74的转动中心固定安装有摇杆75,而用于驱动摇杆75旋转的驱动机构8安装在滚动轮3 的转轴上,且驱动机构8包括凸轮81和驱动杆82,凸轮81固定安装在滚动轮3的转轴上,且凸轮81偏离圆心处的转动杆上套接有转动连接的驱动杆82,驱动杆82的另一端穿过安装板5开设的滑动腔9并与摇杆75的连接端转动连接。
需要说明的是:教学机器人在进行移动时,滚动轮3旋转从而转轴上的凸轮81随之旋转,并驱动驱动杆82摇动摇杆75旋转,旋转的摇杆75带动驱动齿轮74转动,因此与之啮合连接的联动齿轮73驱动发电机71进行蓄电工作,从而教学机器人在行驶过程中不断进行电能储备,提高了教学机器人的经济效益性以及工作时间的持久性。
参考图5和图7所示,承载板9a通过调节机构9b安装在安装板5上,而调节机构9b包括安装块91b、安装腔92b、丝杆93b、升降板94b、提升柱95b、从动齿轮96b、主动齿轮97b和驱动电机98b,安装块91b固定安装在蓄电箱 6的后方,且安装块91b上开设有安装腔92b,安装腔92b内安装有两组转动连接的丝杆93b,且两根丝杆93b之间架设有螺纹连接的升降板94b,升降板 94b的上表面固定安装有多根等高的提升柱95b,且每一根提升柱95b均贯穿安装块91b的顶壁并与承载板9a的下表面固定连接,两根丝杆93b的底部均固定套接有从动齿轮96b,且两个从动齿轮96b之间的安装腔92b内安装有转动连接的主动齿轮97b,主动齿轮97b分别与两侧的从动齿轮96b啮合连接,且主动齿轮97b的转动中心与驱动电机98b的输出端固定连接,驱动电机98b 固定安装在安装板5的下表面,且承载板9a上安装有机器人的头体9d,头体 9d的眼槽处安装有投影仪9e,承载板9a的前端面固定安装有显示屏9c。
需要说明的是:利用机器人头体9d上的投影仪9e可以对学生、或学习人员进行学习指导,同时承载板9a上的显示屏9c也可以播放学习视频,而开启驱动电机98b带动主动齿轮97b旋转,因此两侧从动齿轮96b上的丝杆93b 进行旋转,使得升降板94b沿着丝杆93b进行升降式调节,从而承载板9a上机器人的头体9d以及显示屏9c得以高度调节,便于学习人员可以更好的进行观测。
参考图6所示,头体9d的顶部安装有摆动机构9f,且摆动机构9f包括立杆91f、弹簧92f和钢球93f,立杆91f固定安装在头体9d的顶部,且立杆91f 的顶端通过弹簧92f弹性连接有钢球93f。
其中,底座1的前端面安装有转动连接的转动小滚轮,提高机器人移动的灵活性。
实际组装过程中:控制箱2分别与储电机构7、调节机构9b电性连接,控制箱2内的控制器还连接有储存模块、定位模块、声音检测模块,储存模块用于储存身体调节机构9b设定的高度,定位模块用于机器人自主判断障碍并通过,声音检测模块用于测量音频信号、捕获音频信号及检测声音强度,而控制器同时能够反向各个模块发出信号,对教学机器人进行指示,以实现各种多媒体内容的切换和控制。
本发明提供的教学机器人及其控制系统的工作原理如下:
教学机器人在进行移动时,滚动轮3旋转从而转轴上的凸轮81随之旋转,并驱动驱动杆82摇动摇杆75旋转,旋转的摇杆75带动驱动齿轮74转动,因此与之啮合连接的联动齿轮73驱动发电机71进行蓄电工作,从而教学机器人在行驶过程中不断进行电能储备,提高了教学机器人的经济效益性以及工作时间的持久性,而利用机器人头体9d上的投影仪9e可以对学生、或学习人员进行学习指导,同时承载板9a上的显示屏9c也可以播放学习视频,而开启驱动电机98b带动主动齿轮97b旋转,因此两侧从动齿轮96b上的丝杆93b进行旋转,使得升降板94b沿着丝杆93b进行升降式调节,从而承载板9a上机器人的头体9d以及显示屏9c得以高度调节,便于学习人员可以更好的进行观测,而控制箱2分别与储电机构7、调节机构9b电性连接,控制箱2内的控制器还连接有储存模块、定位模块、声音检测模块,储存模块用于储存身体调节机构9b设定的高度,定位模块用于机器人自主判断障碍并通过,声音检测模块用于测量音频信号、捕获音频信号及检测声音强度,而控制器同时能够反向各个模块发出信号,对教学机器人进行指示,以实现各种多媒体内容的切换和控制。
以上仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种模块化机器人教学实训平台控制系统
- 一种教学用航模机器人及其控制系统