一种利用新型摆平动作的脱水控制方法
文献发布时间:2023-06-19 10:22:47
技术领域
本发明属于洗衣脱水控制技术领域,特别是涉及一种利用新型摆平动作的脱水控制方法。
背景技术
目前市场上大部分滚筒洗衣机脱水前的纠偏摆平动作过于单一,以至于造成滚筒洗衣机清洗一些实物负载时出现难以脱水的情况,即便实现脱水也会出现纠偏时间过长,脱水转速过低甚至于个别负载在脱水时出现撞击箱体等较为不可观的现象。
对于上述所述的可能因脱水前纠偏导致产生的现象会直接影响到产品质量,以及给用户带来不好的体验。面对现今科技发展及生活质量的改善对于各方面的产品质量人们的需求都在不断的提升。而针对滚筒洗衣机脱水时其重要的质量标准,我们需要尽可能的使该种现象减少。而取消该现象的根本因素为尽可能的将桶内实物负载产生的偏心和称重值减小,大部分负载都会较容易的满足脱水需求,达到所需标准。但一些个别负载会因为吸水或占桶体积过大,会使得脱水难以进行,而寻常纠偏也很那将此类负载进行抖散以达到脱水的要求。所以需要在纠偏动作上进行改进。
为解决上述问题,本发明提供一种利用新型摆平动作的脱水控制方法。
发明内容
本发明的目的在于提供一种利用新型摆平动作的脱水控制方法,用以解决背景技术中提出的技术问题。
为解决上述技术问题,本发明是通过以下技术方案实现的:
本发明为一种利用新型摆平动作的脱水控制方法,包括如下过程:
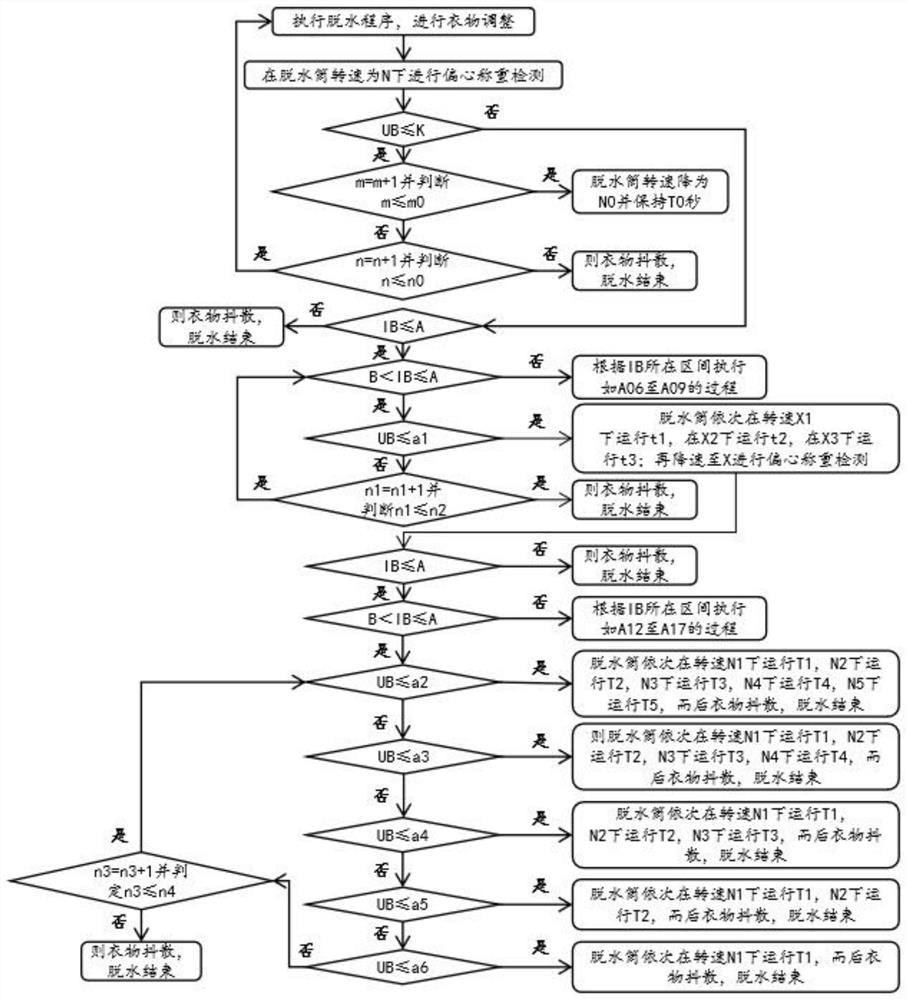
A00:执行脱水程序,进行衣物调整;
A01:在脱水筒转速为N下进行偏心称重检测;
A02:判断UB≤K;若是,则执行A03;若否,则执行A05;
其中,UB为偏心称重值,K为预设的称重最大阈值;
A03:执行m=m+1并判断m≤m0;若是,脱水筒转速降为N0并保持T0秒;若否,则执行A04;
其中,m为减速次数且m初始值为0,m0为预设的减速次数阈值;
A04:n=n+1并判断n≤n0;若是,执行A00;若否,则衣物抖散,脱水结束;其中,n0为调整次数第一阈值且n初始值为0;
A05:判定IB≤A;若是,则执行A06;若否,则衣物抖散,脱水结束;
其中,IB为称重值,A为第一称重阈值;
A06:判定B<IB≤A;若是,则执行A07;若否,则根据IB所在区间执行如A06至A09的过程;
其中,B为第二称重阈值;
A07:判定UB≤a1;若是,执行A09;若否,则执行A08;
其中,a1为对应当前区间的偏心阈值a1;
A08:n1=n1+1并判断n1≤n2;若是,衣物调整后执行A07;若否,则衣物抖散,脱水结束;其中,n2为调整次数第二阈值且n1初始值为0;
A09:进行预脱水,脱水筒依次在转速X1下运行t1,在X2下运行t2,在X3下运行t3;再降速至X进行偏心称重检测;
A10:预脱水后判断IB≤A;若是,执行A11;若否,则衣物抖散,脱水结束;
A11:判断B<IB≤A;若是,则执行A12;若否,则根据IB所在区间执行如A12至A17的过程;
A12:判定UB≤a2;若是,则脱水筒依次在转速N1下运行T1,N2下运行T2,N3下运行T3,N4下运行T4,N5下运行T5,而后衣物抖散,脱水结束;若否,则执行A13;其中,a2为第二偏心阈值;
A13:判断UB≤a3;若是,则脱水筒依次在转速N1下运行T1,N2下运行T2,N3下运行T3,N4下运行T4,而后衣物抖散,脱水结束;若否,则执行A14;其中,a3为第三偏心阈值;
A14:判断UB≤a4;若是,则脱水筒依次在转速N1下运行T1,N2下运行T2,N3下运行T3,而后衣物抖散,脱水结束;若否,则执行A15;其中,a4为第四偏心阈值;
A15:判断UB≤a5;若是,则脱水筒依次在转速N1下运行T1,N2下运行T2,而后衣物抖散,脱水结束;若否,则执行A16;其中,a5为第五偏心阈值;
A16:判断UB≤a6;若是,则脱水筒依次在转速N1下运行T1,而后衣物抖散,脱水结束;若否,执行A17;其中,a6位第六偏心阈值
A17:执行n3=n3+1并判定n3≤n4;若是,进行衣物调整后执行A12;若否,则衣物抖散,脱水结束;其中,n4为调整次数第二阈值且n3初始值为0。
作为一种优选的技术方案,A06中根据IB所在区间执行如A06至A09的过程具体如下:
当C<IB≤B时,将a1替换为b1执行A06至A09;
当D<IB≤C时,将a1替换为c1执行A06至A09;
当E<IB≤D时,将a1替换为d1执行A06至A09;
当F<IB≤E时,将a1替换为e1执行A06至A09。
作为一种优选的技术方案,A11中根据IB所在区间执行如A12至A17的过程具体包括如下:
当C<IB≤B时,将a2、a3、a4、a5、a6对应替换为b2、b3、b4、b5、b6执行A12至A17;
当D<IB≤C时,将a2、a3、a4、a5、a6对应替换为c2、c3、c4、c5、c6执行A12至A17;
当E<IB≤D时,将a2、a3、a4、a5、a6对应替换为d2、d3、d4、d5、d6执行A12至A17;
当F<IB≤E时,将a2、a3、a4、a5、a6对应替换为e2、e3、e4、e5、e6执行A12至A17。
本发明具有以下有益效果:
本发明通过改进脱水前的纠偏动作来加强机器脱水性能;根据机器之前的脱水纠偏动作进行分析,在脱水前再一次进行大偏心检测,并通过动作进行抖散在通过判断来决定是否继续往下脱水;以达到脱水性能提升。
当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明的一种利用新型摆平动作的脱水控制方法的流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1所示,本发明为一种利用新型摆平动作的脱水控制方法,包括如下过程:
A00:执行脱水程序,进行衣物调整;
A01:在脱水筒转速为N下进行偏心称重检测;
A02:判断UB≤K;若是,则执行A03;若否,则执行A05;
其中,UB为偏心称重值,K为预设的称重最大阈值;
A03:m=m+1并判断m≤m0;若是,脱水筒转速降为N0并保持T0秒;若否,则执行A04;
其中,m为减速次数且m初始值为0,m0为预设的减速次数阈值;
A04:n=n+1并判断n≤n0;若是,执行A00;若否,则衣物抖散,脱水结束;其中,n0为调整次数第一阈值且n初始值为0;
A05:判定IB≤A;若是,则执行A06;若否,则衣物抖散,脱水结束;
其中,IB为称重值,A为第一称重阈值;
A06:判定B<IB≤A;若是,则执行A07;若否,则根据IB所在区间执行如A06至A09的过程;
其中,B为第二称重阈值;
A07:判定UB≤a1;若是,执行A09;若否,则执行A08;
其中,a1为对应当前区间的偏心阈值a1;
A08:n1=n1+1并判断n1≤n2;若是,衣物调整后执行A07;若否,则衣物抖散,脱水结束;其中,n2为调整次数第二阈值且n1初始值为0;
A09:进行预脱水,脱水筒依次在转速X1下运行t1,在X2下运行t2,在X3下运行t3;再降速至X进行偏心称重检测;
A10:预脱水后判断IB≤A;若是,执行A11;若否,则衣物抖散,脱水结束;
A11:判断B<IB≤A;若是,则执行A12;若否,则根据IB所在区间执行如A12至A17的过程;
A12:判定UB≤a2;若是,则脱水筒依次在转速N1下运行T1,N2下运行T2,N3下运行T3,N4下运行T4,N5下运行T5,而后衣物抖散,脱水结束;若否,则执行A13;其中,a2为第二偏心阈值;
A13:判断UB≤a3;若是,则脱水筒依次在转速N1下运行T1,N2下运行T2,N3下运行T3,N4下运行T4,而后衣物抖散,脱水结束;若否,则执行A14;其中,a3为第三偏心阈值;
A14:判断UB≤a4;若是,则脱水筒依次在转速N1下运行T1,N2下运行T2,N3下运行T3,而后衣物抖散,脱水结束;若否,则执行A15;其中,a4为第四偏心阈值;
A15:判断UB≤a5;若是,则脱水筒依次在转速N1下运行T1,N2下运行T2,而后衣物抖散,脱水结束;若否,则执行A16;其中,a5为第五偏心阈值;
A16:判断UB≤a6;若是,则脱水筒依次在转速N1下运行T1,而后衣物抖散,脱水结束;若否,执行A17;其中,a6位第六偏心阈值
A17:执行n3=n3+1并判定n3≤n4;若是,进行衣物调整后执行A12;若否,则衣物抖散,脱水结束;其中,n4为调整次数第二阈值且n3初始值为0。
其中,A06中根据IB所在区间执行如A06至A09的过程具体如下:
当C<IB≤B时,将a1替换为b1执行A06至A09;
当D<IB≤C时,将a1替换为c1执行A06至A09;
当E<IB≤D时,将a1替换为d1执行A06至A09;
当F<IB≤E时,将a1替换为e1执行A06至A09。
其中,A11中根据IB所在区间执行如A12至A17的过程具体包括如下:
当C<IB≤B时,将a2、a3、a4、a5、a6对应替换为b2、b3、b4、b5、b6执行A12至A17;
当D<IB≤C时,将a2、a3、a4、a5、a6对应替换为c2、c3、c4、c5、c6执行A12至A17;
当E<IB≤D时,将a2、a3、a4、a5、a6对应替换为d2、d3、d4、d5、d6执行A12至A17;
当F<IB≤E时,将a2、a3、a4、a5、a6对应替换为e2、e3、e4、e5、e6执行A12至A17。
本发明实际使用时,通过提供脱水控制方法,以减少我们平常滚筒洗衣机在脱水时一些负载会出现偏心过大导致脱水失败、转速过小、含水率过高、甚至撞击箱体等一些负面影响;以此达到用户对于脱水的需求,来优化脱水过程的处理,加强产品自身的优势;另外,通过改进脱水前的纠偏动作来加强机器脱水性能;根据机器之前的脱水纠偏动作进行分析,在脱水前再一次进行大偏心检测,并通过动作进行抖散在通过判断来决定是否继续往下脱水;以达到脱水性能提升。
值得注意的是,上述系统实施例中,所包括的各个单元只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
另外,本领域普通技术人员可以理解实现上述各实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,相应的程序可以存储于一计算机可读取存储介质中。
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
- 一种利用新型摆平动作的脱水控制方法
- 一种利用新型开关元件完成切换动作的超高压喷枪