一种机械手感知器
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及测试设备技术领域。
背景技术
触觉对人体皮肤的基本感知能力起着至关重要的作用。它也是大多数生物从外部世界获取信息的直接形式之一。近年来,随着柔性电子技术及人工智能(AI)机器人技术的飞速发展,人与机器之间安全友好互动的需求已经成为一个重要的课题。
柔性触觉传感器将外界(如弯曲和压力等)刺激转化为可测量或可记录的信号。可以像皮肤一样感受外部的受力部位,作为反馈信号,以对外部环境做出一定的响应。
目前仍然不容易找到一个简单而廉价的方案来解决多功能传感器应用,如开发成本相对较高,精度低用户友好性等要求都很难完全满足。因此,开发实用的柔性触觉传感器是有潜力的。
从目前现状来看, 触觉感知发展缓慢,这可以归因于以下挑战。首先,触觉传感器需要具有可穿戴性,并与适当形状的表面相结合,具有兼容性、耐用性和耐磨性,半导体行业(如Si)中常用的脆性材料是不可行的,这体现了柔性传感研究的意义和发展的必要性。
发明内容
本发明要解决的技术问题是提供一种机械手感知器,它具有成本低,工作可靠,便于安装维护等特点。
为解决上述技术问题,本发明所采取的技术方案是:
一种机械手感知器,包括手套和设置在手套上的手指感知装置;
手指感知装置包括大拇指感知器,食指感知器,中指感知器,无名指感知器和小拇指感知器;大拇指感知器,食指感知器,中指感知器,无名指感知器和小拇指感知器设置在手套上,且分别位于与大拇指指背,食指指背,中指指背,无名指指背和小拇指指背相对应的位置;手套具有弹性,以用于穿戴在机械手上,将手指感知装置紧贴并定位在机械手手指指背的相应位置;
大拇指感知器、食指感知器、中指感知器、无名指感知器和小拇指感知器均为长条形手指感知器,手指感知器由指关节手势识别传感器与指节压力识别传感器间隔组合在一起形成,各指关节手势识别传感器和指节压力识别传感器与各自手指的指关节位置和指节位置一一对应;
手指感知器的长度和宽度与其所对应的手指指背的长度和宽度相适配,且为多层结构, 其包括封装定位层,指关节手势电容传感层结构和指节压力电阻传感层结构;
指关节手势电容传感层结构由上至下依次为:指关节上层导电硅胶导电层,指关节中层硅胶介电层和指关节下层导电硅胶导电层,在指关节上层导电硅胶导电层和指关节下层导电硅胶导电层分别设有电容输出导线,以形成指关节手势识别传感器信号输出线;
指节压力电阻传感层结构由上至下依次为指节上层导电硅胶导电层,指节中层硅胶介电空心层和指节下层导电硅胶导电层,指节中层硅胶介电空心层为设有中间开孔的硅胶介电层,在指节上层导电硅胶导电层和指节下层导电硅胶导电层分别设有电阻输出导线,以形成指节压力识别传感器信号输出线;
封装定位层包括上层硅胶封装定位层和下层硅胶封装定位层,分别位于手指感知器的最上层和最下层,上层硅胶封装定位层的下表面与指关节手势电容传感层结构的指关节上层导电硅胶导电层的上表面和指节压力电阻传感层结构的指节上层导电硅胶导电层的上表面粘合在一起,下层硅胶封装定位层的上表面与指关节手势电容传感层结构的指关节下层导电硅胶导电层的下表面和指节压力电阻传感层结构的指节下层导电硅胶导电层的下表面粘合在一起,从而将各指关节手势电容传感层结构和指节压力电阻传感层结构固定连接在一起, 通过上层硅胶封装定位层和下层硅胶封装定位层固定连接后的指关节手势电容传感层结构和指节压力电阻传感层结构分别形成各指关节手势识别传感器和各指节压力识别传感器,使它们分别处于与其相对应的指关节位置和指节位置;
当手指弯曲时,指关节手势电容传感层结构的指关节中层硅胶介电层因其柔性特性,随所受到的拉伸力的大小负相关的产生厚度变化,从而使指关节上层导电硅胶导电层与指关节下层导电硅胶导电层之间的距离产生相应变化,进而使其电容值产生相应变化,由指关节手势识别传感器信号输出线输出与手指的弯曲角度相对应的电容值;
当指节部位受到压力时,指节压力电阻传感层结构的指节上层导电硅胶导电层和指节下层导电硅胶导电层因其柔性特性,由指节中层硅胶介电空心层的中间开孔处靠近并接触在一起,且接触面积大小与其所受到的压力的大小正相关,从而使接触电阻值产生相应变化,由指节压力识别传感器信号输出线输出与指节部位受到的压力相对应的电阻值。
本发明进一步改进在于:
手指感知器中的指关节手势电容传感层结构与指节压力电阻传感层结构之间设有硅胶隔离层,以保持相邻的指关节手势识别传感器与指节压力识别传感器之间的绝缘性。
它还包括硅胶封装前侧壁,硅胶封装后侧壁,硅胶封装左侧壁和硅胶封装右侧壁,硅胶封装前侧壁,硅胶封装后侧壁,硅胶封装左侧壁和硅胶封装右侧壁分别与手指感知器的前端面,后端面,左端面和右端面贴合在一起,从而与封装定位层共同形成手指感知器的手指感知器全密封封装结构,以将手指感知器中的各指关节手势电容传感层结构和指节压力电阻传感层结构封装在其内部,手指感知器全密封封装结构设有指关节手势识别传感器信号输出线导引孔和指节压力识别传感器信号输出线导引孔,以用于引出指关节手势识别传感器信号输出线和指节压力识别传感器信号输出线。
硅胶隔离层包括上硅胶隔离层和下硅胶隔离层,上硅胶隔离层用于隔离相邻的指关节上层导电硅胶导电层7与指节上层导电硅胶导电层;下硅胶隔离层用于隔离相邻的指关节下层导电硅胶导电层与指节下层导电硅胶导电层;上硅胶隔离层与封装定位层的上层硅胶封装定位层为一体结构,下硅胶隔离层与封装定位层的下层硅胶封装定位层为一体结构。
指关节中层硅胶介电层与指节中层硅胶介电空心层为一体结构。
采用上述技术方案所产生的有益效果在于:
本发明将手指感知装置设置在手套上;手套具有弹性,以用于穿戴在机械手上,将手指感知装置紧贴并定位在机械手手指指背的相应位置;便于本装置与机械手的安装与拆除;
指关节手势电容传感层结构利用指关节上层导电硅胶导电层和指关节下层导电硅胶导电层的导电性作为电容极板,利用指关节中层硅胶介电层的绝缘性作为支撑电容极板之间的介质,利用硅胶介电层稳定的弹性形变特性及导电硅胶稳定的导电特性,在指关节弯曲对其进行拉伸时,产生与拉伸力的大小负相关的厚度变化,从而使电容极板之间的距离产生相应变化,进而使其电容值产生相应变化,结构简单,成本低,工作可靠;
指节压力电阻传感层结构利用指节上层导电硅胶导电层和指节下层导电硅胶导电层导电性能稳定,导电电阻适中,且具有的稳定的弹性形变特性,在指节部位受到压力时,由指节中层硅胶介电空心层的中间开孔处靠近并接触在一起,且接触面积大小与其所受到的压力的大小正相关,从而使接触电阻值产生相应变化,结构简单,成本低,工作可靠;
封装定位层将各指关节手势电容传感层结构和指节压力电阻传感层结构固定连接在一起,使它们分别处于与其相对应的指关节位置和指节位置;
指关节中层硅胶介电层与指节中层硅胶介电空心层为一体结构,简化了制作流程,降低了制作成本。
它具有成本低,工作可靠,便于安装维护等特点。
附图说明
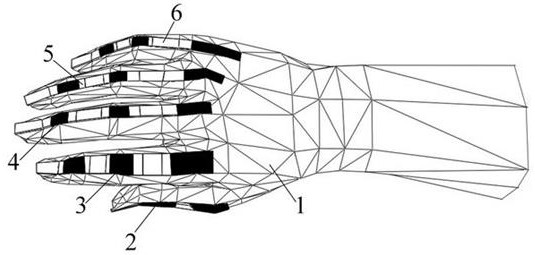
图1是本发明的结构示意图;
图2是图1中手指感知器的层结构示意图;
图3是图2中的A-A剖视图;
图4是指关节手势识别传感器手势与电容相对值的变化曲线图;
图5是指节压力识别传感器压力与电阻值的变化曲线图。
在附图中:1. 手套;2. 大拇指感知器;3. 食指感知器;4. 中指感知器;5. 无名指感知器;6. 小拇指感知器;7. 指关节上层导电硅胶导电层;8. 指关节中层硅胶介电层;9. 指关节下层导电硅胶导电层;10. 电容输出导线;11. 指节上层导电硅胶导电层;12.指节中层硅胶介电空心层;12-1. 指节中层硅胶介电空心层的中间开孔;13. 指节下层导电硅胶导电层;14. 电阻输出导线;15.上层硅胶封装定位层;16. 下层硅胶封装定位层;17. 硅胶封装前侧壁;18. 硅胶封装后侧壁;19. 上硅胶隔离层;20. 下硅胶隔离层;21.硅胶封装右侧壁;22. 硅胶封装左侧壁。
具体实施方式
下面将结合附图和具体实施例对本发明进行进一步详细说明。
本发明中使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接、粘贴等常规手段,在此不再详述。
由图1~3所示的实施例可知,本实施例包括手套1和设置在手套1上的手指感知装置;
手指感知装置包括大拇指感知器2,食指感知器3,中指感知器4,无名指感知器5和小拇指感知器6;大拇指感知器2,食指感知器3,中指感知器4,无名指感知器5和小拇指感知器6设置在手套1上,且分别位于与大拇指指背,食指指背,中指指背,无名指指背和小拇指指背相对应的位置;手套1具有弹性,以用于穿戴在机械手上,将手指感知装置紧贴并定位在机械手手指指背的相应位置;
大拇指感知器2、食指感知器3、中指感知器4、无名指感知器5和小拇指感知器6均为长条形手指感知器,手指感知器由指关节手势识别传感器与指节压力识别传感器间隔组合在一起形成,各指关节手势识别传感器和指节压力识别传感器与各自手指的指关节位置和指节位置一一对应;
手指感知器的长度和宽度与其所对应的手指指背的长度和宽度相适配,且为多层结构, 其包括封装定位层,指关节手势电容传感层结构和指节压力电阻传感层结构;
指关节手势电容传感层结构由上至下依次为:指关节上层导电硅胶导电层7,指关节中层硅胶介电层8和指关节下层导电硅胶导电层9,在指关节上层导电硅胶导电层7和指关节下层导电硅胶导电层9分别设有电容输出导线10,以形成指关节手势识别传感器信号输出线;
指节压力电阻传感层结构由上至下依次为指节上层导电硅胶导电层11,指节中层硅胶介电空心层12和指节下层导电硅胶导电层13,指节中层硅胶介电空心层12为设有中间开孔12-1的硅胶介电层,在指节上层导电硅胶导电层11和指节下层导电硅胶导电层13分别设有电阻输出导线14,以形成指节压力识别传感器信号输出线;
封装定位层包括上层硅胶封装定位层15和下层硅胶封装定位层16,分别位于手指感知器的最上层和最下层,上层硅胶封装定位层15的下表面与指关节手势电容传感层结构的指关节上层导电硅胶导电层7的上表面和指节压力电阻传感层结构的指节上层导电硅胶导电层11的上表面粘合在一起,下层硅胶封装定位层16的上表面与指关节手势电容传感层结构的指关节下层导电硅胶导电层9的下表面和指节压力电阻传感层结构的指节下层导电硅胶导电层13的下表面粘合在一起,从而将各指关节手势电容传感层结构和指节压力电阻传感层结构固定连接在一起, 通过上层硅胶封装定位层15和下层硅胶封装定位层16固定连接后的指关节手势电容传感层结构和指节压力电阻传感层结构分别形成各指关节手势识别传感器和各指节压力识别传感器,使它们分别处于与其相对应的指关节位置和指节位置;
当手指弯曲时,指关节手势电容传感层结构的指关节中层硅胶介电层8因其柔性特性,随所受到的拉伸力的大小负相关的产生厚度变化,从而使指关节上层导电硅胶导电层7与指关节下层导电硅胶导电层9之间的距离产生相应变化,进而使其电容值产生相应变化,由指关节手势识别传感器信号输出线输出与手指的弯曲角度相对应的电容值;
当指节部位受到压力时,指节压力电阻传感层结构的指节上层导电硅胶导电层11和指节下层导电硅胶导电层13因其柔性特性,由指节中层硅胶介电空心层12的中间开孔12-1处靠近并接触在一起,且接触面积大小与其所受到的压力的大小正相关,从而使接触电阻值产生相应变化,由指节压力识别传感器信号输出线输出与指节部位受到的压力相对应的电阻值。需要注意的是,其指节部位受到压力的检测的范围限于指节上层导电硅胶导电层11和指节下层导电硅胶导电层13因受到压力开始接触至最大限度接触之间的电阻变化,因此,根据压力检测范围,对指节压力电阻传感层结构各层参数及指节中层硅胶介电空心层的中间开孔的大小进行相应的调整。
手指感知器中的指关节手势电容传感层结构与指节压力电阻传感层结构之间设有硅胶隔离层,以保持相邻的指关节手势识别传感器与指节压力识别传感器之间的绝缘性。
它还包括硅胶封装前侧壁17,硅胶封装后侧壁18,硅胶封装左侧壁22和硅胶封装右侧壁21,硅胶封装前侧壁17,硅胶封装后侧壁18,硅胶封装左侧壁22和硅胶封装右侧壁21分别与手指感知器的前端面,后端面,左端面和右端面贴合在一起,从而与封装定位层共同形成手指感知器的手指感知器全密封封装结构,以将手指感知器中的各指关节手势电容传感层结构和指节压力电阻传感层结构封装在其内部,手指感知器全密封封装结构设有指关节手势识别传感器信号输出线导引孔和指节压力识别传感器信号输出线导引孔,以用于引出指关节手势识别传感器信号输出线和指节压力识别传感器信号输出线。
硅胶隔离层包括上硅胶隔离层19和下硅胶隔离层20,上硅胶隔离层19用于隔离相邻的指关节上层导电硅胶导电层7与指节上层导电硅胶导电层11;下硅胶隔离层20用于隔离相邻的指关节下层导电硅胶导电层9与指节下层导电硅胶导电层13;上硅胶隔离层19与封装定位层的上层硅胶封装定位层15为一体结构,下硅胶隔离层20与封装定位层的下层硅胶封装定位层16为一体结构。
指关节中层硅胶介电层8与指节中层硅胶介电空心层12为一体结构。
实验数据
图4为手指感知器的指关节手势识别传感器在下述物理参数下手势与电容相对值的变化曲线图。
指关节手势识别传感器长1.2 cm;宽1.2 cm; 指关节上层导电硅胶导电层7和指关节下层导电硅胶导电层9采用东莞市华易塑胶制品有限公司生产的导电硅胶【厚度:0.05cm;密度:1.45g/cm
图5为手指感知器的指节压力识别传感器在下述物理参数下压力与电阻值的变化曲线图。
指节压力识别传感器长1.0 cm;宽1.2 cm;指节中层硅胶介电空心层12的中间开孔12-1位于其中间部位,其为方形开口,长0.7 cm;宽0.7 cm;指节上层导电硅胶导电层11和指节下层导电硅胶导电层13采用东莞市华易塑胶制品有限公司生产的导电硅胶【厚度:0.05cm;密度:1.45g/cm3;邵氏硬度:A60正负5】;指节中层硅胶介电空心层12、封装定位层中上层硅胶封装定位层15及下层硅胶封装定位层16采用美国smooth-on公司生产的绝缘硅胶【型号Ecoflex00-30 ;厚度:0.03 cm;100%模量:10psi;抗拉强度:200psi;破坏伸长量:900%; 抗撕拉强度:38pli】。
经试验证明,硅胶封装前侧壁17,硅胶封装后侧壁18,硅胶封装左侧壁22和硅胶封装右侧壁21的物理参数与指关节手势识别传感器和指节压力识别传感器的输入输出响应曲线基本无实质性影响,因此未予呈现。
- 一种机械手感知器
- 一种机械手感知器