一种隧道机器人轨道自动防火门
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及防火门技术领域,尤其涉及一种隧道机器人轨道自动防火门。
背景技术
目前在电力行业特别是安防行业中,手动防火门适用于安全通道内防火门,而隧道内的监测机器人通过隧道时,需要自动防火门才能使这种监测系统顺畅运行。
然而大多数自动防火门都是平开门形式,当需要机器人轨道穿过防火门时,这种形式的密封性就不够,而密封性好的防火门又存在开门机构复杂、开门效率低下等问题。
发明内容
本发明所要解决的技术问题是:提供一种密封性好的高效的隧道机器人轨道自动防火门。
为了解决上述技术问题,本发明采用的技术方案为:一种隧道机器人轨道自动防火门,包括供轨道穿过的门框,还包括第一翻转门、第一驱动组件、第二翻转门和第二驱动组件,所述第一翻转门与所述门框的一侧铰接,所述第二翻转门与所述门框相对的另一侧铰接,所述第一翻转门与第二翻转门的交界处设有密封件,所述密封件抵触所述轨道。
本发明的有益效果在于:隧道机器人轨道自动防火门结构简单、工作稳定;轨道与翻转门之间密封紧密,翻转开门的形式利于提高了开门效率,同时也减小了防火门占用空间。
附图说明
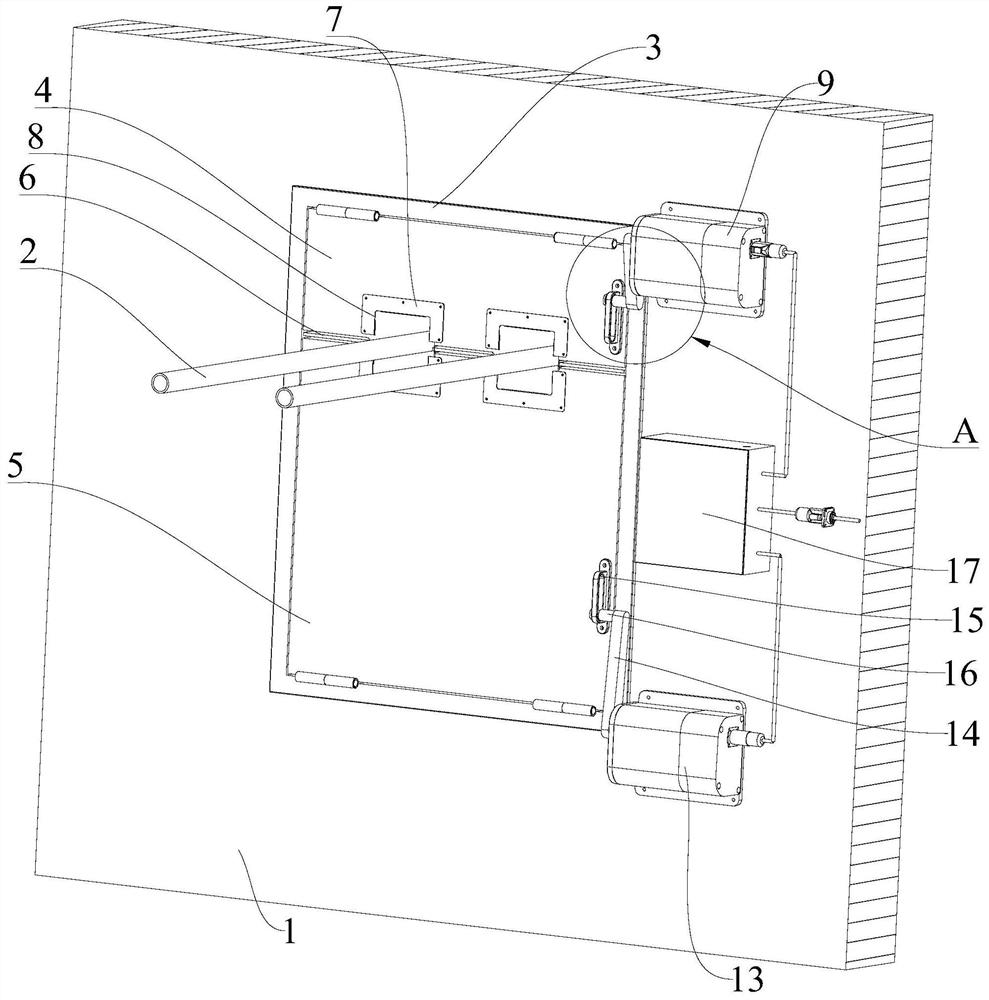
图1为本发明实施例一的隧道机器人轨道自动防火门的整体结构的结构示意图;
图2为图1中细节A的放大图;
图3为本发明实施例一的隧道机器人轨道自动防火门的正视图。
标号说明:
1、墙壁;2、轨道;3、门框;4、第一翻转门;5、第二翻转门;6、密封件;7、钣金件;8、避位窗口;9、第一驱动电机;10、第一驱动杆;11、第一限位件;12、第一限位滑块;13、第二驱动电机;14、第二驱动杆;15、第二限位件;16、第二限位滑块;17、接线盒。
具体实施方式
为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
请参照图1至图3,一种隧道机器人轨道自动防火门,包括供轨道2穿过的门框3,还包括第一翻转门4、第一驱动组件、第二翻转门5和第二驱动组件,所述第一翻转门4与所述门框3的一侧铰接,所述第二翻转门5与所述门框3相对的另一侧铰接,所述第一翻转门4与第二翻转门5的交界处设有密封件6,所述密封件6抵触所述轨道2。
从上述描述可知,本发明的有益效果在于:隧道机器人轨道自动防火门结构简单、工作稳定;轨道2与翻转门之间密封紧密,翻转开门的形式利于提高了开门效率,同时也减小了防火门占用空间。
进一步的,所述第一翻转门4及所述第二翻转门5上分别设有所述密封件6。
由上述描述可知,第一翻转门4和第二翻转门5上分别设置密封件6能够对轨道2形成包覆效果,从而进一步提高隧道机器人轨道自动防火门的密封性能。
进一步的,所述第一翻转门4和/或第二翻转门5上设有用于安装所述密封件6的钣金件7。
由上述描述可知,密封件6安装稳定,且后期维护、更换方便。
进一步的,所述第一翻转门4和/或第二翻转门5上具有用于避位所述轨道2的避位窗口8。
由上述描述可知,避位窗口8的设置能够令第一翻转门4与第二翻转门5分界处的宽度设置得比较小,有利于提高隧道机器人轨道自动防火门的密封性能。
进一步的,所述第一驱动组件包括第一驱动电机9、第一驱动杆10和第一限位件11,所述第一驱动电机9的输出端连接所述第一驱动杆10,所述第一驱动杆10上设有第一限位滑块12,所述第一限位件11上设有与所述第一限位滑块12相配合的第一限位滑槽;所述第二驱动组件包括第二驱动电机13、第二驱动杆14和第二限位件15,所述第二驱动电机13的输出端连接所述第二驱动杆14,所述第二驱动杆14上设有第二限位滑块16,所述第二限位件15上设有与所述第二限位滑块16相配合的第二限位滑槽。
由上述描述可知,第一驱动组件与第二驱动组件结构简单、传动稳定性好。
进一步的,所述第一驱动电机9与所述第一驱动杆10的连接处设有用于限制所述第一驱动杆10转动角度的阻尼结构。
由上述描述可知,阻尼结构的存在能够限制第一翻转门4的开合角度,减小了开门角度过大的隐患,利于提高开门效率、降低能源消耗。
进一步的,所述第一驱动电机9包括依次相连的前盖、中壳和后盖,所述中壳内设有主电机、主动轮、第一从动轮及第二从动轮,所述主电机的输出端连接所述主动轮,所述第一从动轮分别与所述主动轮及第二从动轮啮合,所述第二从动轮连接所述第一驱动杆10。
由上述描述可知,第一驱动电机9采用二级传动形式,不仅传动效率高,而且整体安装方便。
进一步的,还包括接线盒17,所述第一驱动组件和第二驱动组件分别与所述接线盒17电性连接。
进一步的,所述接线盒17内设有电性连接的控制板和电源板,所述第一驱动组件和第二驱动组件分别与所述控制板电性连接,所述电源板外接电源。
由上述描述可知,接线盒17的设置能够达到对隧道机器人轨道自动防火门供电和控制的目的,使得在隧道机器人轨道自动防火门的控制上更加方便,接线更加简单明了。
进一步的,所述轨道2的数量为两个,两个所述轨道2并排排列,所述第一翻转门4的顶部与所述门框3的上侧铰接,所述第二翻转门5的底部与所述门框3的下侧铰接。
由上述描述可知,根据轨道2的设置方式可合理的选择第一、二翻转门的开门方式为上下开合或左右开合。
实施例一
请参照图1至图3,本发明的实施例一为:一种隧道机器人轨道自动防火门,安装于墙壁1上,所述隧道机器人轨道自动防火门包括供轨道2穿过的门框3,还包括第一翻转门4、第一驱动组件、第二翻转门5和第二驱动组件,所述第一翻转门4与所述门框3的一侧铰接,所述第二翻转门5与所述门框3相对的另一侧铰接,所述第一翻转门4与第二翻转门5的交界处设有密封件6,所述密封件6抵触所述轨道2。
本实施例中,所述轨道2的数量为两个,两个所述轨道2并排排列,所述第一翻转门4的顶部与所述门框3的上侧铰接,所述第二翻转门5的底部与所述门框3的下侧铰接。在其他实施例中,数量为多个的所述轨道2呈一竖列排列时,所述第一翻转门4与所述门框3的左侧铰接,所述第二翻转门5与所述门框3的右侧铰接。
为保证隧道机器人轨道自动防火门的密封效果,所述第一翻转门4及所述第二翻转门5上分别设有所述密封件6,可选的,所述密封件6为防火橡胶密封垫。
为方便安装以及后续维护,所述第一翻转门4和/或第二翻转门5上设有用于安装所述密封件6的钣金件7。
进一步的,所述第一翻转门4和/或第二翻转门5上具有用于避位所述轨道2的避位窗口8。为方便加工制造,本实施例仅在第一翻转门4靠近所述第二翻转门5的一端设置所述避位窗口8,在其他实施例中,所述第一翻转门4和第二翻转门5上可分别设置所述避位窗口8的部分区域。不难理解的,所述密封件6的部分区域填充所述避位窗口8。
详细的,所述第一驱动组件包括第一驱动电机9、第一驱动杆10和第一限位件11,所述第一驱动电机9的输出端连接所述第一驱动杆10,所述第一驱动杆10上设有第一限位滑块12,所述第一限位件11上设有与所述第一限位滑块12相配合的第一限位滑槽;所述第二驱动组件包括第二驱动电机13、第二驱动杆14和第二限位件15,所述第二驱动电机13的输出端连接所述第二驱动杆14,所述第二驱动杆14上设有第二限位滑块16,所述第二限位件15上设有与所述第二限位滑块16相配合的第二限位滑槽。
为限制第一翻转门4的开合角度大小,所述第一驱动电机9与所述第一驱动杆10的连接处设有用于限制所述第一驱动杆10转动角度的阻尼结构。同理,所述第二驱动电机13与所述第二驱动杆14的连接处也可设置用于限制所述第二驱动杆14转动角度的阻尼结构。
具体的,所述第一驱动电机9包括依次相连的前盖、中壳和后盖,所述中壳内设有主电机、主动轮、第一从动轮及第二从动轮,所述主电机的输出端连接所述主动轮,所述第一从动轮分别与所述主动轮及第二从动轮啮合,所述第二从动轮连接所述第一驱动杆10。同理,所述第二驱动电机13也可以采用与所述第一驱动电机9相同的结构。
为方便安装、控制,所述隧道机器人轨道自动防火门还包括接线盒17,所述第一驱动组件和第二驱动组件分别与所述接线盒17电性连接。本实施例中,所述接线盒17内设有电性连接的控制板和电源板,所述第一驱动组件和第二驱动组件分别与所述控制板电性连接,所述电源板外接电源,例如市电等。
所述第一驱动电机9、第二驱动电机13及所述接线盒17分别设于所述墙壁1上。
综上所述,本发明提供的隧道机器人轨道自动防火门结构简单、工作稳定;轨道与翻转门之间密封紧密,翻转开门的形式利于提高了开门效率,同时也减小了防火门占用空间;驱动组件采用二级传动形式,不仅传动效率高,而且整体安装方便。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种隧道机器人轨道自动防火门
- 自动巡检机器人过防火门活动轨道装置、轨道系统及巡检机器人系统