智能防卫保护方法及智能保镖机器人
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及安防的技术领域,尤其涉及一种智能防卫保护方法及智能保镖机器人。
背景技术
当前,我们所了解的保镖,大多是经过专业训练的男性壮汉,除了有一定的格斗技能外,还会拥有其他额外技能,如侦察判断、安全布防、情报收集、保密措施、危机预防、险境撤离等各方面的综合能力。虽然,保镖可以承担一定的防卫工作,但是,对于突如其来的攻击,需要及时反应并做出适当的防卫操作,而人类在这方面的敏感度和判断力方面仍有所欠缺。同时,对于快速准确识别潜在的危险人物,而这方面的识别判断力,人类更是难以学习和掌握。
因此,有必要提供一种技术手段以解决上述缺陷。
发明内容
本发明的目的在于克服现有技术之缺陷,提供一种智能防卫保护方法及智能保镖机器人,以解决现有技术中的人类保镖难以处理突如其来的攻击和快速准确识别潜在的危险人物的问题。
本发明是这样实现的,一种智能防卫保护方法,包括:
采集指定范围内生物活体的视频信息,所述视频信息包括肢体动作信息和面部微表情信息;
将采集的生物活体的视频信息输入至危险分析数据库,以计算分析该指定范围内生物活体是否存在危险攻击行为,并且将分析出存在危险攻击行为的生物活体定义为危险生物活体,而将分析出不存在危险攻击行为的生物活体定义为非危险生物活体;
若生物活体被判定为非危险生物活体,则不执行防卫保护操作;
若生物活体被判定为危险生物活体,则先进行距离测量操作,以测量出所述危险生物活体与保护对象之间的距离D
根据该距离D
其中,所述危险攻击程度范围D
所述防卫保护操作包括警告提示的一级防卫保护操作、防护保护对象并警告危险生物活体的二级防卫保护操作、以及防护保护对象并刺激击退危险生物活体的三级防卫保护操作;
若该距离D
若该距离D
若该距离D
本发明还提供一种智能保镖机器人,包括:
机器人身体,所述机器人身体包括躯体、头部、左臂、右臂、左腿以及右腿,所述头部可转动设于所述躯体的上端,所述左臂可活动设于所述躯体的一侧端上,所述右臂可活动设于所述躯体的另一侧端上,所述左腿可活动设于所述躯体下端的一侧端上,所述右腿可活动设于所述躯体下端的另一侧端上;
采集单元,所述采集单元设于所述头部内,用于采集指定范围内生物活体的视频信息;其中,所述视频信息包括肢体动作信息和面部微表情信息;
距离测量单元,所述距离测量单元设于所述头部内,用于测量出所述危险生物活体与保护对象之间的距离D
防卫保护装置,所述防卫保护装置设于所述机器人身体上,用于根据该距离D
控制系统,所述控制系统设于所述躯体内部,并分别连接于所述采集单元、所述距离测量单元、所述防卫保护装置,用于控制所述采集单元、所述距离测量单元、所述防卫保护装置工作;所述控制系统包括危险分析数据库模块,该危险分析数据库模块用于计算分析该指定范围内生物活体是否存在危险攻击行为,并且将分析出存在危险攻击行为的生物活体定义为危险生物活体,而将分析出不存在危险攻击行为的生物活体定义为非危险生物活体。
与现有技术相比,本发明的有益效果是:
由于在指定范围内不断地采集生物活体的视频信息,具体为,生物活体的肢体动作信息和面部微表情信息,以分析出该指定范围内生物活体是否存在危险攻击行为;而且,若该生物活体被判定为危险生物活体时,会先进行距离测量操作,以测量出危险生物活体与保护对象之间的距离D
附图说明
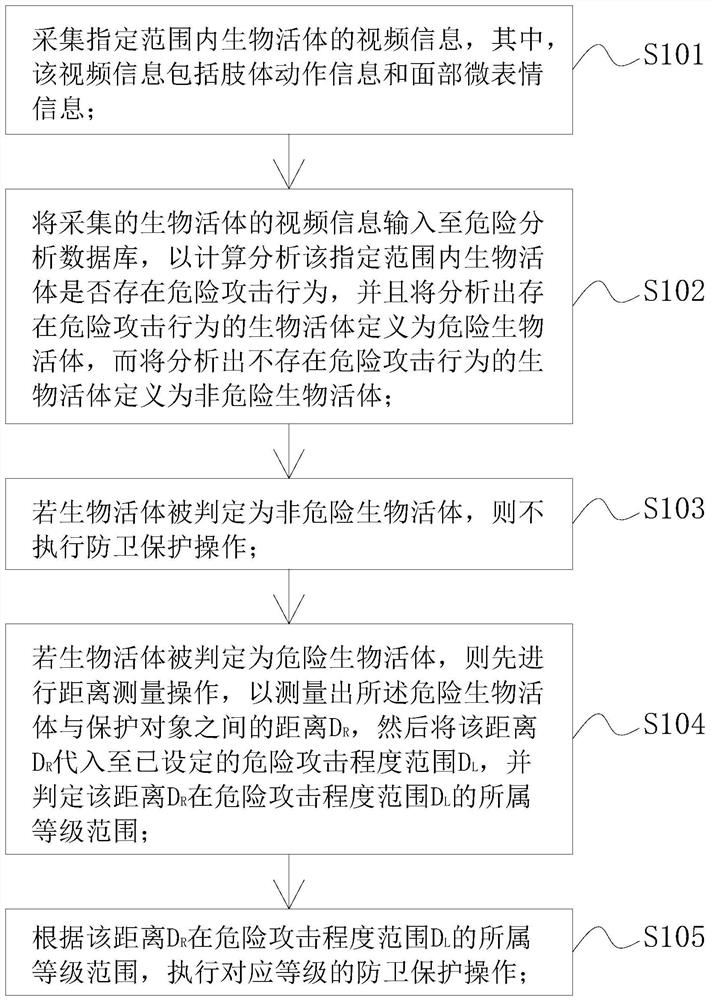
图1为本发明实施例的智能防卫保护方法的流程框图;
图2为本发明实施例的智能防卫保护方法中的危险分析数据库对采集的生物活体的视频信息进行计算分析的示意图;
图3为本发明实施例的智能防卫保护方法中的危险生物活体和非危险生物活体的对比示意图;
图4为本发明实施例的智能保镖机器人的示意图;
图5为本发明实施例的智能保镖机器人的工作原理的示意图;
图6为本发明实施例的智能保镖机器人的控制系统控制各部件的示意图。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
实施例一:
请参阅图1至图3,本发明提供一较佳实施例,该实施例涉及一种智能防卫保护方法,包括以下步骤:
步骤S101、采集指定范围内生物活体的视频信息,其中,该视频信息包括肢体动作信息和面部微表情信息,而该指定范围为以保护对象为中心而半径为10m的圆形范围;
步骤S102、将采集的生物活体的视频信息输入至危险分析数据库,以计算分析该指定范围内生物活体是否存在危险攻击行为,并且将分析出存在危险攻击行为的生物活体定义为危险生物活体,而将分析出不存在危险攻击行为的生物活体定义为非危险生物活体;
步骤S103、若生物活体被判定为非危险生物活体,则不执行防卫保护操作;
步骤S104、若生物活体被判定为危险生物活体,则先进行距离测量操作,以测量出该危险生物活体与保护对象之间的距离D
步骤S105、根据该距离D
其中,所述危险攻击程度范围D
该防卫保护操作包括警告提示的一级防卫保护操作、防护保护对象并警告危险生物活体的二级防卫保护操作、以及防护保护对象并刺激击退危险生物活体的三级防卫保护操作;
若该距离D
若该距离D
若该距离D
据此,由于在指定范围内不断地采集生物活体的视频信息,具体为,生物活体的肢体动作信息和面部微表情信息,以分析出该指定范围内生物活体是否存在危险攻击行为;而且,若该生物活体被判定为危险生物活体时,会先进行距离测量操作,以测量出危险生物活体与保护对象之间的距离D
这样,对于突如其来的攻击,能够及时反应并做出适当的防卫操作,由此,既可及时防卫保护对象,又可有效地击退攻击者。同时,还可以快速准确识别出潜在的危险人物和危险动物,以可提早作出防卫保护操作,有效避免攻击和伤害的发生。
需要说明的是,对于通过生物活体的面部微表情而对应得出该生物活体是否存在危险攻击行为是基于以下原理:
粒子是物理学的物质波动特性和粒子特性之间没有明确的界限,光子能量(ε)是通过已知的普朗克常量的光子能源和频率(ν)相连接的(ε=hν)。生物体和各部位放射的能量空间内,该部位振动频率和这一比例的假说。通过结论来说在记录生物体产生出的能量,需要记录生物体多个部位产生的振动(空间内或每部位之间)。这个过程需要保证有效分辨率和快速处理能力的非接触式TV系统来实现。此外,获取生物信号图像频率构成要素(即每个部位产生的振动(位置变化,波动)频率)是被观察的生物能量,即拥有精神生理学特性的庞大的信息。生物信号图像分析也可由人来去实现或通过数字生物信号图像和特定要素用程序处理的数学方式进行处理。数学处理的算法创建和分析的监控显示器的类似彩色视频流或可视化分析的生物信号图像方式最为有效。换句话说,需要得出的生物信号图像频率构成要素是人体精神生理学特性状态和持续的情感状态水平一目了然的看出人的多种刺激产生的人体状态变化进行分类。所有思考和行为或任何情况下关于反应情感状态是瞬间产生的变化(每个生物信号图像)是连续的,所以生物信号图像的信息数(摄像机分辨率)和可快速处理的系统之间能够找出最优的关系是非常重要的。振动图像增加的大小振幅调整(amplitude modulating)是对目标最大振动频率的人体特定区域产生的位置变化频率数或振幅平均值,通过颜色调整(modulating)显示出的人体精神生理学特性的任何变化一目了然的瞬间进行记录。大脑维度变化(fractal fluc tuation)是学习、记忆及多种课题的解决过程中了解的有着最为核心作用的实现方式。根据实验显示人体振动最为集中产生的部位为大脑,大部分情况振动图像的频率构成要素是人的头部周围所存在图像要比身体周围振动图像显示更大。人体产生的变化是振动图像不均匀或颜色形态不对称的方式显示。这是可以通过看生物信号图像来了解。根据实验结果包含最多的信号是人体情感状态的最大振动频率传递的频率平均水平或相邻点之间的背景水平模糊或生物信号图像的可视化接收时产生的真实变化隐蔽的情况发生。与频率构成的要素不同的振幅构成要素,要比几何学相关联的更为有效。最重要的是振动点位的几何学连接的生物信号图像振幅构成要的生物信号图像的品质评估和为系统调整的更为精确的确定参数建立。
请参阅图2和图3,当该生物活体为人类时,危险攻击行为的判定基于如下:
步骤S201、按照预设时间5秒内间隔抽取视频信息中的人类肢体动作的多个视频帧,识别出该多个视频帧中人类的位置和姿态,然后由时间序列分析模型根据该人类的位置和姿态的相关信息计算出该人类攻击所述保护对象的攻击概率G
步骤S202、和/或,按照预设时间5秒内间隔抽取视频信息中的人类面部微表情的多个视频帧,将该多个视频帧的人类面部微表情的相关信息代入至预设的攻击程度D
F
F
Fin为振动图像处理频率;
N为50帧还有高的限制值得帧之间的差异统计计算数;
n为目标占最大的热值;
P
f
f
上述计算公式为对所有这些攻击性水平进行测定,显然地,更低的攻击性状态的数值接近0,高攻击性状态的数值接近1。
其中,本实施例的阀值D
较佳地,攻击概率G
以二元组(W
据此,通过上述二元组的方式输入时间数列模型,可以准确地预测人类的攻击行为。其中,本实施例的阀值G
当生物活体为动物时,危险攻击行为的判定基于如下:
步骤S301、按照预设时间5秒内间隔抽取所述视频信息中的动物肢体动作的多个视频帧,识别出该多个视频帧中动物的位置和姿态,然后由时间序列分析模型根据该动物的位置和姿态的相关信息计算出该动物攻击所述保护对象的攻击概率G
步骤S302、和/或,按照预设时间5秒内间隔抽取视频信息中的动物面部微表情的多个视频帧,将该多个视频帧对应的动物面部微表情图像与危险分析数据库中预先储存的多个动物攻击性图像进行匹配,然后将该多个视频帧对应的动物面部微表情图像与匹配挑选出的动物攻击性图像进行匹配度分析,以获取匹配度P
需要说明的是,动物本身的危险攻击行为,也是可以透过其面部微表情测量出来,如小狗,当小狗的额头突然紧皱起来,那么此时的小狗是处于生气状态,具有危险攻击行为;又或者,当小狗露出牙齿,这也是一种危险的微表情信号,无论是嘴唇完全向前拉长还是向后,这种呲牙咧嘴的表现都具有危险攻击性。
那么,较佳地,攻击概率G
以二元组(W
据此,通过上述二元组的方式输入时间数列模型,可以准确地预测动物的攻击行为。其中,本实施例的阀值G
实施例二:
请参阅图4至图6,为本发明的另一较佳实施例,该实施例涉及一种智能保镖机器人100,包括机器人身体10、采集单元20、距离测量单元30、防卫保护装置40以及控制系统50,下面对该智能保镖机器人100的各部分作进一步描述:
机器人身体10包括躯体11、头部12、左臂13、右臂14、左腿15以及右腿16,头部12可转动设于躯体11的上端,左臂13可活动设于躯体11的一侧端上,右臂14可活动设于躯体11的另一侧端上,左腿15可活动设于躯体11下端的一侧端上,右腿14可活动设于躯体11下端的另一侧端上;
采集单元20设于头部12内,用于采集指定范围内生物活体的视频信息;其中,视频信息包括肢体动作信息和面部微表情信息;
距离测量单元30设于头部12内,用于测量出危险生物活体与保护对象之间的距离D
防卫保护装置40设于机器人身体10上,用于根据该距离D
控制系统50设于躯体11内部,并分别连接于采集单元20、距离测量单元30、防卫保护装置40,用于控制采集单元20、距离测量单元30、防卫保护装置40工作;控制系统50包括危险分析数据库模块51,该危险分析数据库模块51用于计算分析该指定范围内生物活体是否存在危险攻击行为,并且将分析出存在危险攻击行为的生物活体定义为危险生物活体,而将分析出不存在危险攻击行为的生物活体定义为非危险生物活体。
据此,通过采集单元20在指定范围内不断地采集生物活体的视频信息,具体为,生物活体的肢体动作信息和面部微表情信息;然后,采集单元20会将采集到的视频信息传至控制系统50的危险分析数据库模块51,以计算分析该指定范围内生物活体是否存在危险攻击行为,并且将分析出存在危险攻击行为的生物活体定义为危险生物活体,而将分析出不存在危险攻击行为的生物活体定义为非危险生物活体;而且,若该生物活体被判定为危险生物活体时,距离测量单元30会对该危险生物活体进行距离测量操作,以测量出危险生物活体与保护对象之间的距离D
这样,对于突如其来的攻击,能够及时反应并做出适当的防卫操作,由此,既可及时防卫保护对象,又可有效地击退攻击者。同时,还可以快速准确识别出潜在的危险人物和危险动物,以可提早作出防卫保护操作,有效避免攻击和伤害的发生。
请参阅图2和图3,当生物活体为人类时,危险攻击行为的判定基于如下:
步骤S201’、按照预设时间5秒内间隔抽取所述视频信息中的人类肢体动作的多个视频帧,识别出该多个视频帧中人类的位置和姿态,然后由时间序列分析模型根据该人类的位置和姿态的相关信息计算出该人类攻击所述保护对象的攻击概率G
步骤S202’、和/或,按照预设时间5秒内间隔抽取所述视频信息中的人类面部微表情的多个视频帧,将该多个视频帧的人类面部微表情的相关信息代入至预设的攻击程度D
F
F
Fin为振动图像处理频率;
N为50帧还有高的限制值得帧之间的差异统计计算数;
n为目标占最大的热值;
P
f
f
其中,本实施例的阀值D
较佳地,攻击概率G
以二元组(W
据此,通过上述二元组的方式输入时间数列模型,可以准确地预测人类的攻击行为。其中,本实施例的阀值G
当生物活体为动物时,危险攻击行为的判定基于如下:
步骤S301’、按照预设时间5秒内间隔抽取所述视频信息中的动物肢体动作的多个视频帧,识别出该多个视频帧中动物的位置和姿态,然后由时间序列分析模型根据该动物的位置和姿态的相关信息计算出该动物攻击所述保护对象的攻击概率G
步骤S302’、和/或,按照预设时间5秒内间隔抽取所述视频信息中的动物面部微表情的多个视频帧,将该多个视频帧对应的动物面部微表情图像与危险分析数据库中预先储存的多个动物攻击性图像进行匹配,然后将该多个视频帧对应的动物面部微表情图像与匹配挑选出的动物攻击性图像进行匹配度分析,以获取匹配度P
较佳地,攻击概率G
以二元组(W
据此,通过上述二元组的方式输入时间数列模型,可以准确地预测动物的攻击行为。其中,本实施例的阀值G
以上所述仅为本发明较佳的实施例而已,其结构并不限于上述列举的形状,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 智能防卫保护方法及智能保镖机器人
- 一种双足机器人电机驱动系统和智能温度保护方法