用于确定安全区域的方法、机器人系统和计算机程序
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及:
-用于确定用于机器人的安全区域的方法;
-用于执行用于确定安全区域的方法的机器人系统;
-计算机程序,其执行用于确定用于机器人的安全区域的方法的步骤。
背景技术
机器人是可通用的运动自动装置,其运动可在运动顺序和路径或角度方面自由编程,并且可选地受传感器引导。所述类型的机器人可配备有抓具、工具和其他生产装置,并且能够执行处理任务和/或生产任务。
如今,机器人的运行要么在仅后方分隔的保护装置的情况下可行,要么在非分隔的保护装置的情况下可行。在非分隔的保护装置的情况下,所述装置的信号必须失效安全地被评估,例如通过失效安全的存储器可编程的控制装置评估。分隔的保护装置例如是防止机器人离开分配给所述机器人的区域的机械屏障。此外,所述通常实现为围栏或格栅的障碍物防止人不受控制地进入机器人的工作区域中。
在此期间存在第一方案,机器人本身具有对其位置的可靠监视,使得在失效安全控制装置中,机器人的位置处于笛卡尔坐标系中,并且能够根据当前位置对特定的安全装置(激光扫描仪、光栅、门开关、...)做出反应。失效安全控制装置与“正常的”控制装置的不同之处在于,对输入/输出和控制程序的冗余执行进行监视。例如,能够在失效安全控制装置中安装两个“正常的”控制装置,所述两个“正常的”控制装置可以并行运行同样的程序,并且将两个控制装置的部分结果/结果相互比较。在不相同时,进行受控关断,使得由此不引起危险。
但是在此情况下,问题是所有安全装置的位置和作用范围的可靠限定。当前,所述限定在规划阶段中手动进行,这易于出错,并且使验收更加困难。此外,必须确保:安全区域使机器人有足够工作空间,以便机器人能够执行所有设置的运动。
在机器人单元中,一方面为机器人预设了机器人在其要完成的任务的过程中要行进的限定的轨道/轨迹,而另一方面,单元具有完全允许机器人在其中运动的限定的安全区域。由于附加的安全装置,所述安全区域能够被标记为当前不可用,使得机器人不能横穿所述安全区域或不能侵入所述安全区域中。
如果机器人不能行进于/占用被占用的安全区域,则所述机器人保持不动并且必须等待所涉及的安全(部分)区域释放。但是,与单元和其他安全装置的几何形状相关地,运动的自动继续是允许的,而不必事先给出(手动的)确认信号。然而,阻挡降低了机器人单元的生产率。
用于正确考虑安全区域的前提是机器人的“笛卡尔安全性”,使得其失效安全控制装置知晓精确的位置和从而能够做出反应。术语“笛卡尔安全性”(英文为“cartesiansafety”)包含:通常机器并且尤其机器人的失效安全控制装置知晓关节以及工具中心点(TCP)的经由机器/机器人的直接运动学计算出的在笛卡尔空间中的位置。基本前提是经由对应的传感器对关节角度进行失效安全的检测,以及经由一个或也有多个失效安全的总线系统从传感器直至控制装置的操纵安全的数据传输。在失效安全控制装置中,直接运动学的计算必须完全借助于用于必要的计算步骤(相加和相乘)的失效安全的程序组件进行。
手动进行安全区域的规划,这也部分原因在于,机器人的运动的规划独立地或在较迟的时刻进行。借此,在预设轨迹上的机器人运动与安全区域之间能够不进行相关,使得后者更容易以机器人的最大工作空间的尺寸限定,以便不限制随后的运动。
在此,围绕机器人的相关关节和点、例如工具中心点TCP安置具有对应半径的球体,并且随后与球体相切地限定长方体或平面。所述长方体/平面可选地不允许被机器人离开或踏入或横穿。在图1中示出对于包含机器人5的机器人单元15的所述情况,其中安全区域S以长方体的形式限定。
在出版物WO 2018/051151 A1[1]中公开了《Verfahren und ein Computerszstemzum Simulieren und Zertifizieren des Sicherheitsmanagements für einen Bereicheiner Produktionsanlage(用于仿真和认证用于生产设备区域的安全管理的方法和计算机系统)》,在所述出版物中存在至少一个机器人和至少一个人,所述方法具有如下方法步骤:
a)限定表格,其包含人的肢体和对应的危险潜力/损害潜力;
b)对机器人的工作过程进行仿真,由此确定第一运动空间体积;
c)对人的动作进行仿真,由此确定第二运动空间体积;
d)在考虑这两个体积的危险潜力/损害潜力的情况下,确定穿过两个体积;
e)在穿过的情况下,重新规划工作过程和人的动作,直至不再有穿过或不达到危险潜力/损害潜力为止。
在WO 2015/176802 A1[2]中公开了《Verfahren zur Vermeidung vonKollisionen eines Roboters mit einem kooperierenden Arbeiter(用于避免机器人与协作的工人碰撞的方法)》,其中借助于仿真来确定关键的(碰撞危险的)轨道点和轨道曲线(例如窄路、窄点或接触点),并且在那里借助于模仿工人的摆(或第二机器人)模仿碰撞,并且由此确定影响第一机器人的运动的变量,例如机器人的允许的行进速度。
在所述情形的两种情况下,所述方法的缺点在于:所述方法不能够在规划阶段进行认证,并且阻挡情况实时地、即在操作运行中才能够解决。
发明内容
因此,本发明所基于的目的在于,说明一种用于确定用于机器人的安全区域的方法,所述方法自动化地针对预设的轨迹不引起机器人的非必要的阻挡,并且在所述方法中,安全区域最优地使用机器人的工作区域。同样地,要说明用于执行用于确定用于机器人的安全区域的方法的机器人系统和计算机程序。
所述目的通过实施例中说明的措施来实现。本发明的有利的设计方案在后续说明中说明。
根据本发明的方法的特征在于:
一种用于确定用于第一机器人的安全区域的方法,所述第一机器人沿预设的轨迹执行操作,其中对于无碰撞的运行,通过以下方法步骤确定安全区域:
(A)将预设的轨迹划分成多个部分轨迹;
(B)确定围绕每个部分轨迹的极值点的多个包络长方体——在下文中称为细粒度包络长方体;
(C)从相对于由扩大的细粒度包络长方体所占的体积对各个细粒度包络长方体的扩大确定优化包络长方体的数量,其中这样确定的优化包络长方体形成用于轨迹的安全区域。
所述解决方案的优点如下:
i)在产生机器人的安全区域方面的传统方式非常耗时,并且需要不仅安全专家而且机器人技术专家的特定的行业知识。在此,由于复杂性,通常找不到最优解决方案。在数字化的过程中,加工单元内的多个机器人(和也有人)之间的交互越来越重要。通过根据本发明的方法,为此的准备工作以及计算性能优化的执行在仿真阶段中自动化地进行。
ii)能够通过仿真支持的方法通过如下方式更好地图解说明这种安全场景的认证(例如通过
iii)在安全构思的研发中,所述方式更有效,因为仿真辨识可能的危险区域并且能够可选地提出建议,以便排除所述危险区域。
本发明的特别的实施方式具有以下优点:
通过使对于完成任务所需的轨迹叠加,能够在仿真阶段中已经完全确定所涉及的机器人的与之相对应的安全区域。
安全区域的数量的减少提高了失效安全控制装置中的随后的处理速度,并从而提高了生产单元的生产率。
已经在仿真程序中自动确定了可行的实施方案,例如激光扫描仪的库的设置、光栅的区域故障屏蔽。
通过根据信号量原理使两个机器人的安全区域叠加,产生机器的必要的碰撞保护,同时设备开放性尽可能大和灵活性尽可能大。
围绕机器人构造机械笼在过去是经证实的手段。借助于所述特别的实施方式,不再需要构造机械笼。这也是重要的,因为如今材料交付至少部分地也借助于机器人进行。
在持续运行中对机器人轨迹重新计算是现有技术。相反,在本发明的另一实施方式中,能够在规划阶段中在失效安全控制装置中在考虑认证的安全区域的情况下进行轨迹的重新计算。大的优点在于,在同时遵循允许的安全区域的情况下,提高了机器人的生产率。重新计算的轨迹被保存,但仅在需要时——在实时地发生阻挡时——使用。因此,失效安全控制装置具有重新计算的或替选的轨迹的轨迹库。
附图说明
下文中根据附图示例性详细阐述本发明。在此示出:
图1示出机器人单元中的机器人的原理示图;
图2示出要防止的碰撞情况/阻挡情况的示图;
图3a示出全局包络长方体的布置;
图3b、图3c示出用于生成用于机器人轨迹的最优安全区域的方法步骤的可视化;
图4示出用于生成用于多个机器人轨迹的最优安全区域的方法步骤的结果;
图5示出具有信号量区域的两个机器人单元的示图;
图6a示出具有碰撞区域/信号量区域的两个机器人的轨迹的安全区域的叠加;
图6b示出具有在自身的安全区域中的碰撞区域的两个机器人的轨迹的安全区域的重新计算;
图7示出基于预设的信号量区域的重新计算的轨迹的示图;
图8示出包括失效安全控制装置和多个机器人的机器人系统。
具体实施方式
就所述出版物而言,使用以下术语和对应的术语层次结构:
i)区域由至少一个包络长方体形成。
ii)包络长方体由于方法步骤的原因而具有不同的粒度,因此以递减的粒度的形式区分成:
-细粒度包络长方体21;
-优化包络长方体22;
-全局包络长方体20。
根据思考方法,上述术语还如下进一步区分:
安全区域S和工作区域A。
与安全区域S和工作区域A的通常含义相反,例如在消防应用的情况下,其中安全区域(=用于公众的障碍物明显大于消防士兵的工作区域)在所述技术的意义上适用
机器人5的工作区域A表示机器人5潜在能够到达的空间。机器人5的安全区域S是工作空间A的部分空间,即
其中机器人5可以在与其他对象无碰撞危险的情况下运动。
所述关系可以从图5中看出。图5示出机器人5和机器人5'的各一个轨迹的潜在的碰撞区域23。所述碰撞区域23通过在图5中未示出的两个安全区域S和S'的叠加产生。相反,在图5中示出(较大的)工作区域A和A',其中带有箭头的附图标记A和A'不交换:借此也应再次示出,以下关系适用(参见上文):
图1示出包含机器人5的机器人单元15。机器人单元15的安全区域S通过长方体形成,工作区域A更大,如可从图1中不难看出:如果安全区域S借助于板限界,则机器人5可能通过不允许的运动穿过板并从而破坏板。
包络长方体20能够围绕多个限界球体4和/或包络椭圆体4形成。三个这种限界球体4
机器人5——如图3a所示——沿轨迹1运动。在根据图3a的简化示图中:包络长方体20通过轨迹1的极值点7确定。在图3a中,仅如下极值点设有附图标记7:所述极值点略微有助于对包络长方体20确定尺寸。在这一点应提及,图2、图3a、...包含三维空间的二维视图。如上所述,为了确定包络长方体,不仅单独增加极值点7,而且还增加具有相应的限界球体4的机器人5的在极值点7的情况下适用的布置。在简化的实施方案中也可行的是,每极值点7采取机器人5的固定的布置,并且对应地假设固定预设的限界球体4。
在图2中示出潜在的碰撞情况或阻挡情况。实际的碰撞情况或阻挡情况与所涉及的机器人5、5'、...的过程的时间变化曲线相关。如以上所提及的那样,对于第一机器人5的轨迹1,包络长方体20经由所述轨迹1的极值点7限定,在这种情况下,所述包络长方体与属于轨迹1的安全区域S一致。对于第二机器人5'设有轨迹1'。现在,如果机器人5'根据图2从左向右在轨迹1'上运动,则在箭头6处尝试侵入到机器人5的安全区域S中。控制装置将停止机器人5'。借助于设计得大的安全区域S,当机器人5处于机器人5'的作用范围之外时,则也得出阻挡。
为了确定最优的安全区域S,提出在下文中结合图3b和图3c解释的方法步骤。
机器人5的轨迹1在此二维地示出,但是该轨迹在现实中是三维的。在进一步的解释过程中,参考球体和包围球体的长方体,但是具有球体和/或椭圆体和/或面/平面的变型方案根据精确相同的原理工作。
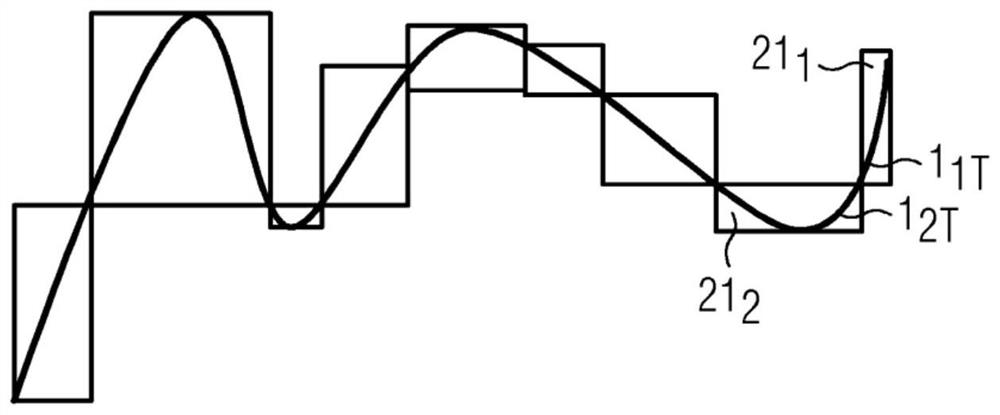
在图3b中,轨迹1被分成部分轨迹1
在操作运行中,所述多个/大量这种细粒度包络长方体21
除了机器人5的预设轨迹1之外,仿真程序例如ProcessSimulate也允许考虑生产单元15中的静态障碍物,因为所述静态障碍物在3D-CAD-模型中作为可用的几何形状对应地存在,这在全局包络长方体20中是不可行的。
因为机器人5不仅必须行进一个轨迹,而且还必须行进多个轨迹1
表1
在确定了用于每个单个轨迹1
激光扫描仪能够确定距离对象的距离,即在此在侵入时能够进行距离相关的反应,例如在距离较大时使机器人减速,而在距离较短时使所述机器人停止。
此外,例如安全开关也被视为保护措施,所述安全开关通过打开门来操纵,并且借助于失效安全控制装置来触发不引起危险的停止。一般:安全区域S的特征可以在于机械限界,其中门仅是这种限界的一个示例。此外,包络长方体22的几何数据以对于失效安全控制装置31可读的形式存储,使得所述无需手动的并由此易出错的步骤能够从仿真/计算转移到失效安全控制装置31中。
在生产单元15中,大多数情况下存在多个机器人5、5'、...,使得上述方法必须补充另一方法步骤。因为机器人5、5'、...的工作空间A、A'、...交叠或必须交叠,所以也确保机器人5、5'、...在操作运行中不彼此碰撞。因此,根据表1的方法以考虑机器人5、5'、...的单个特定的安全区域S、S'、...被扩展,如这在表2中所示。为此,在单个包络长方体22的优化与安全区域S、S'、...和安全措施的自动导出之间,对所涉及的机器人5、5'、...的轨迹1、1'、...进行叠加。
表2
在图6a中示出对于第一机器人5的具有轨迹1和另一参与者5'或另外的机器人5'的轨迹1'的情况。机器人5的安全区域S通过优化包络长方体22的合并来限定,其中以下公式未指明:S=∪22
接着,首先限定所谓的信号量区域23。所述信号量区域23包含在重叠区域25中,参见图6b。信号量区域23同样具有长方体的设计方案。随后,将两个机器人5、5'的至今的优化包络长方体22在其尺寸方面调整或分成较小的长方体或最小化,使得所述包络长方体不再具有与信号量区域23的交叠,然而完全包围所述包络长方体的自身的机器人5、5'的其余轨迹1、1'。信号量区域23根据信息科学中的信号量原理命名,所述信号量原理定义互斥(“mutual exclusion”)。如果机器人中的一个机器人想要行进横穿所述信号量区域23的轨迹,则该机器人必须首先请求穿行的许可(“Take Semaphore”)。如果信号量区域23是空闲的,则请求的机器人获得在预设轨迹上穿行的许可。相反,如果信号量区域23正好被另外的机器人占用,则要么请求的机器人被阻挡,直至信号量区域23空闲,要么该机器人获得对应的错误通知/指示通知。如果这在操作上是允许的,请求的机器人能够对这种通知做出反应,例如,其中所述请求的机器人首先行进另一轨迹。
在横穿信号量区域23之后,必须立即释放所述信号量区域(“ReleaseSemaphore”),以便另外的机器人尽快获得所述信号量区域23分配。
所述方法不限于两个机器人,而是针对N个机器人设计。在此,所述原理也适用于包括信号量区域23的必要区域的最小化。
同样地,上述方法也能够用于可能侵入到与机器人的碰撞区域中的其他对象,例如将货盘运输给机器人的手动操控的叉式装卸机。叉式装卸机或其驾驶员也必须请求信号量区域,并且在结束占用后再次释放所述信号量区域。这隐含地也能够经由交通信号灯和对叉式装卸机区域的监视(例如借助于激光扫描仪)来进行。借此,人与机器人的合作也是可行的,因为在仿真阶段中也已经考虑了人的运动,并且将其建模为“N+1”个机器人。随后,所述方法的所有其他步骤如至今自动化地运行,并且在考虑必要的预设(参见表1和表2)的情况下基于优化包络长方体提供合适的安全区域。
因为通过动态占用的信号量区域23引起的机器人5的阻挡是不可预测的,所以机器人5在执行其当前任务时被停止,并且仅在先前被占用的区域释放后才能够继续所述执行,如其上述那样。
为了也解决所述问题,也必须动态地规划机器人5、5'、...的轨迹1、1'。动态轨迹规划的构思在机器人中是已知的,但是通常认为超出对于预设轨迹所需的范围给机器人也提供对应大的工作空间A。经典地,机器人处于借助于格栅或类似的进行分隔的保护装置封锁的机器人单元中。
基于先前阐述的确定由多个优化包络长方体22形成的安全区域S的构思,如此限定的优化包络长方体22用作动态轨迹规划的基础。因此,所述计算在失效安全控制装置31中进行,使得机器人的安全性即使对于新的轨迹也能够在任何时候完全且经认证地被确保。
为了确保在允许的区域内正确执行新的轨迹,机器人控制装置必须具有特征“笛卡尔安全性”,使得失效安全控制装置31也知道机器人5'实际处于何处。仅在具有失效安全的编码器(关节角度传感器)的机器人与失效安全控制装置之间互相配合时,才确保“笛卡尔安全性”。轨迹规划的结果再次被首先提供到优化包络长方体22的上级计算中,使得能够基于新的附加的轨迹进行重新计算。
图6b示出如下已知情况:因为信号量区域23被占用,所以轨迹1不能被执行。因此,基于限定的优化包络长方体22进行引导绕过信号量区域23的重新计算/重新规划。首先验证所述轨迹1
对于新的轨迹1
图8示出控制架构,其中上级的失效安全控制装置31管理信号量区域23。各个机器人5'、5”、...的下级的机器人控制装置必须在实时运行中关于所述信号量区域23开始查询34'、34”、...,以便在完成分配后能够占用对应的信号量区域23——通过行驶或通过借助于所涉及的机器人5'、5”、...的臂的操作。在完成使用后,所涉及的机器人5'、5”、...必须将不再需要且不再占用的信号量区域23再次释放。所述上级的失效安全控制装置31的优点在于,在分配信号量区域23时能够考虑其他参数,例如各个机器人5'、5”、...的任务的优先级。
具有用于另外的机器人5'的轨迹库的动态轨迹规划由上级的失效安全控制装置31进行。在所述上级的失效安全控制装置31中,存在关于所有安全区域/优化包络长方体22且关于信号量区域23的所有数据→信号量区域的管理装置33。由此确保新的动态生成的轨迹不引起信号量区域。新的信号量区域可能引起新的阻挡,并极大地增加上级的失效安全控制装置31中的管理耗费。替代术语“上级的失效安全控制装置”,还使用术语“中央的失效安全控制装置”。
附图标记列表、词汇表
1 (第一)机器人的轨迹、机器人轨道
1
(第一)机器人的部分轨迹
1
(第一)机器人的轨迹
1'、1"、...
另外的机器人的轨迹、另外的参与者的轨迹
4;4
包络球体、限界球体、包络椭圆体
5 机器人、第一机器人
5'、5"、...
另外的机器人、另外的参与者
6 (尝试的)侵入安全区域中
7 轨迹的极值点
15 机器人单元;生产单元
20 (第一)机器人的包络长方体、全局包络长方体
20'、20"
另外的机器人的包络长方体、全局包络长方体、
另外的参与者的包络长方体、全局包络长方体
21 (第一)机器人的细粒度包络长方体
21'、21"
另外的机器人的细粒度包络长方体、
另外的参与者的细粒度包络长方体
21
对应于部分轨迹1
22 (第一)机器人的优化包络长方体
22'、22"
另外的机器人的优化包络长方体
另外的参与者的优化包络长方体
22
对应于多个细粒度包络长方体21
24
未优化的包络长方体的示例
23 碰撞区域、信号量区域
25 两个安全区域或两个优化包络长方体的重叠部/交叠部;重叠区域
30 机器人系统、机器人设备
31 失效安全控制装置
32 第一机器人的局部控制装置
32'、32"、...、
另外的机器人的局部控制装置
33 信号量区域的管理装置
34'、34"、...、
通过机器人5'、5"、...的信号量区域的查询/使用/释放A、A'、...、
机器人5'、5"、...的工作区域
S、S'、...、
机器人5'、5"、...的安全区域
S
至机器人5的轨迹1
TCP 工具中心点
引用文献列表[1]WO 2018/051151A1
A METHOD AND A SYSTEM FOR SIMULATING AND CERTIFYING SAFETY MANAGEMENTFOR AN AREA OF A PRODUCTION PLANT
SIEMENS INDUSTRY SOFTWARE LTD.;
IL-7019900Airport City
公开日期2018年3月22日(22.03.2018)
[2]WO 2015/176802Al
VERFAHREN ZUR VERMEIDUNG VON KOLLISIONEN EINES ROBOTERS IN EINERARBEITSSTATION
DAIMLER AG,DE-70327Stuttgart
公开日期2015年11月26日(26.11.2015)
- 用于确定安全区域的方法、机器人系统和计算机程序
- 用于确定便携式钥匙装置相对屏障是否位于有效区域的方法、装置、计算机程序和计算机程序产品