人工突触器件和人工突触器件的制备方法
文献发布时间:2023-06-19 11:00:24
技术领域
本发明实施例涉及仿生人工突触器件以及类生物感知系统技术领域,尤其涉及一种人工突触器件和人工突触器件的制备方法。
背景技术
人工智能技术的发展为人机交互、感知系统及机器人假肢的控制等带来了革命性变化,同时对复杂数据的处理和人机交互界面提出了新的要求。不同于目前基于软件系统和冯·诺依曼构架实现的神经网络,人脑运算方式具有高效率和低功耗的特点。因此,在硬件层面上模拟人脑的神经拟态器件,对构建新的运算系统具有重要意义。此外,由于神经拟态器件能够将传感器数字信号转变成与类神经模拟信号,有望实现与生物神经信号的兼容,构建智能、高效的人机交互界面。因此,神经形态器件受到了广泛研究,其相关材料、制备工艺和器件结构不断得到优化。
忆阻器与生物突触相似的结构和工作机制,近年来在(仿生)人工突触领域受到广泛关注。生物体中神经元的连接强度可以通过突触权重的变化进行调节,Na
发明内容
本发明实施例提供一种人工突触器件和人工突触器件的制备方法,以较好地模拟生物突触的工作机制,通过对第二子层的调控,可模拟生物体中不同种类的离子、生物配体等;第一子层也可模拟细胞膜内生物受体的功能,从突触工作机制角度实现仿生设计。
本发明实施例提出一种人工突触器件,该人工突触器件包括:
柔性衬底;
两个电极,设置于所述柔性衬底一侧,且在平行于所述柔性衬底的平面内相对设置;
阻变层,包括第一子层和第二子层,所述第一子层位于所述第二子层靠近所述柔性衬底的一侧;所述第一子层分别覆盖两个所述电极的部分区域,所述第二子层在所述柔性衬底上的垂直投影与所述第一子层在所述柔性衬底上的垂直投影重合;
其中,所述第一子层包括二维材料或一维材料,所述第二子层包括离子导电型的聚合物电解质材料;所述第二子层的离子种类、离子浓度以及迁移率可调控。
在一实施例中,所述第一子层包括表面官能团和表面缺陷;
所述表面官能团由化学方法进行调控,所述表面缺陷由物理方法进行调控。
在一实施例中,所述第二子层还包括掺杂物质、塑化剂和纳米颗粒;
所述离子种类由所述掺杂物质的种类决定;所述离子浓度和所述迁移率由所述塑化剂和所述纳米颗粒的掺杂浓度进行调控。
在一实施例中,所述电极的厚度为40nm-150nm。
在一实施例中,所述柔性衬底表面采用等离子界面处理或者紫外亲水处理。
在一实施例中,所述柔性衬底的材料包括具有柔性和生物兼容性的聚合物材料或生物材料。
在一实施例中,所述柔性衬底的厚度为10μm-20μm。
本发明实施例还提供了上述任一种人工突触器件在类神经拟态器件、神经网络算法基本单元器件以及智能仿生感知系统的应用。
本发明实施例还提供了一种人工突触器件的制备方法,该制备方法用于形成上述任一种人工突触器件,该制备方法包括:
提供硬质衬底;
在所述硬质衬底一侧形成柔性衬底;
在所述柔性衬底背离所述硬质衬底的一侧形成所述电极;
在所述电极背离所述柔性衬底一侧形成所述第一子层;
在所述第一子层背离所述柔性衬底一侧形成所述第二子层;
分离所述柔性衬底与所述硬质衬底。
在一实施例中,在所述柔性衬底背离所述硬质衬底的一侧形成所述电极之前还包括:
对所述柔性衬底表面进行等离子体界面处理;
在所述柔性衬底背离所述硬质衬底的一侧形成所述电极之后,且在所述电极背离所述柔性衬底一侧形成所述第一子层之前还包括:
对所述柔性衬底表面进行等离子亲水处理或紫外亲水处理;
在所述电极背离所述柔性衬底一侧形成所述第一子层之后,且在所述第一子层背离所述柔性衬底一侧形成所述第二子层之前还包括:
采用化学方法对所述第一子层的表面官能团进行调控,以及采用物理方法对所述第一子层的表面缺陷进行调控。
本发明实施例提供的人工突触器件,通过设置柔性衬底;两个电极,设置于柔性衬底一侧,且在平行于柔性衬底的平面内相对设置;阻变层,包括第一子层和第二子层,第一子层位于第二子层靠近柔性衬底的一侧;第一子层分别覆盖两个电极的部分区域,第二子层在柔性衬底上的垂直投影与第一子层在柔性衬底上的垂直投影重合;其中,第一子层包括二维材料或一维材料,第二子层包括离子导电型的聚合物电解质材料;第二子层的离子种类、离子浓度以及迁移率可调控;从而能较好地模拟生物突触的工作机制,通过对第二子层的调控,可模拟生物体中不同种类的离子、生物配体等;第一子层也可模拟细胞膜内生物受体的功能,进而可从突触工作机制角度实现仿生设计。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
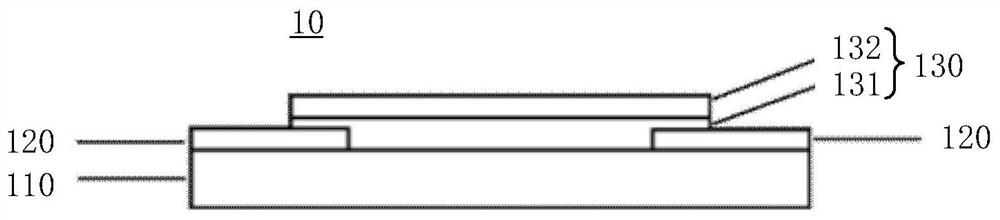
图1是本发明实施例提供的一种人工突触器件的结构示意图;
图2是本发明实施例提供的人工突触器件中的忆阻器的电流-电压特性曲线图;
图3是本发明实施例提供的人工突触器件中的忆阻器在脉冲刺激下模拟突触后信号的响应示意图;
图4是本发明实施例提供的一种人工突触器件的制备方法的流程示意图;
图5是本发明实施例提供的另一种人工突触器件的制备方法的流程示意图。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。所描述的实施例仅仅是本发明一部分实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
相关技术中,利用忆阻器结构上的相似性模拟神经突触功能是一种简单且有效的方法,目前已经能够实现如短期可塑性、长期可塑性等部分基本的生物突触行为,但是,深入的机理仍有待挖掘,以便从工作机制上理解和模拟神经突触工作原理,在稳定性和能耗等方面提升器件性质,使类脑的认知型智能成为现实。
本发明实施例提供了一种基于双层结构阻变层忆阻器的柔性人工突触器件及其制备方法。该人工突触器件为平面结构,具体可包括:柔性衬底、位于柔性衬底一侧且位于同一平面相对设置的一对电极以及双层结构的阻变层;柔性衬底为聚酰亚胺等聚合物薄膜;电极材料由粘附层和惰性电极组成,如Ti/Au等;双层结构的阻变层的第一子层(即下层)为功能化的二维材料或一维材料,双层结构的阻变层的第二子层(即上层)为离子导电型的聚合物电解质材料。本发明实施例通过调节双层结构的阻变层下层材料的表面官能团和缺陷以及上层材料的离子种类、浓度、迁移率等,实现对包括短期可塑性、长期可塑性等神经突触功能的模拟;具体的,通过对第二子层的调控,可模拟生物体中不同种类的离子、生物配体等;第一子层也可模拟细胞膜内生物受体的功能,从而有利于从突触工作机制角度实现人工突触器件的仿生设计。
参照图1,该人工突触器件10(本文中也简称为“器件”)包括:柔性衬底110;两个电极120,设置于柔性衬底110一侧,且在平行于柔性衬底110的平面内相对设置;阻变层130,包括第一子层131和第二子层132,第一子层131位于第二子层132靠近柔性衬底110的一侧;第一子层131分别覆盖两个电极120的部分区域,第二子层132在柔性衬底110上的垂直投影与第一子层131在柔性衬底110上的垂直投影重合;其中,第一子层131包括二维材料或一维材料,第二子层132包括离子导电型的聚合物电解质材料;第二子层132的离子种类、离子浓度以及迁移率可调控。
其中,该人工突触器件10形成为基于双层结构阻变层忆阻器的柔性人工突触器件。阻变层下层材料为功能化的二维材料或一维材料;示例性的,二维材料可包括石墨烯或过渡金属硫化物,功能化的二维材料的层数可为3层-10层;一维材料可包括碳纳米管。阻变层上层材料为离子导电型的聚合物电解质材料,其中离子的种类、浓度以及迁移率的变化可模拟生物体中神经元的连接关系中的突触权重的变化和突触信号的传递路径的变化。
如此,可利用本发明实施例提供的人工突触器件10较好地模拟生物突触的工作机制,通过对第二子层132的调控,可模拟生物体中不同种类的离子、生物配体等;第一子层131也可模拟细胞膜内生物受体的功能,进而可从突触工作机制角度实现仿生设计。
在一实施例中,第一子层131包括表面官能团和表面缺陷;表面官能团由化学方法进行调控,表面缺陷由物理方法进行调控。
如此,通过对表面光能团和表面缺陷进行调控,可实现对细胞膜内生物受体的不同状态的模拟,即可通过对第一子层131的表面进行调控,实现对细胞膜内生物受体的功能的模拟。
示例性的,化学方法可包括化学氧化还原等本领域技术人员可知的任一种化学方法;物理方法可包括紫外光照射、电子束照射等本领域技术人员可知的任一种物理方法。
在一实施例中,第二子层132还包括掺杂物质、塑化剂和纳米颗粒;离子种类由掺杂物质的种类决定;离子浓度和迁移率由塑化剂和纳米颗粒的掺杂浓度进行调控。
示例性的,离子导电型的聚合物电解质材料可包括壳聚糖、聚氧化乙烯、聚乙烯醇(polyvinyl alcohol,vinylalcohol polymer,PVA)或本领域技术人员可知的其他类型的离子导电型的聚合物电解质;掺杂物质可包括锂(Li
塑化剂是在工业生产上被广泛使用的高分子材料助剂,又称增塑剂。凡是添加到聚合物材料中能使聚合物塑性增加的物质都称为塑化剂。塑化剂的使用可以改善高分子材料的性能,降低生产成本,提高生产效益。
纳米颗粒,又称纳米尘埃,纳米尘末,指纳米量级的微观颗粒。它被定义为至少在一个维度上小于100纳米的颗粒。小于10纳米的半导体纳米颗粒,由于其电子能级量子化,又被称为量子点。
示例性的,塑化剂可为碳酸亚乙脂(ethylene carbonate,EC)或聚甲基丙烯酸甲酯,(polymethyl methacrylate,PMMA);纳米颗粒可包括纳米二氧化钛(TiO
在其他实施方式中,塑化剂和纳米颗粒可分别为本领域技术人员可知的任一种塑化剂或纳米颗粒材料,本发明实施例对此不赘述也不作限定。
其中,通过改变金属盐中的金属离子的种类,可实现对聚合物电解质材料中的离子种类的调控;通过改变塑化剂和纳米颗粒的掺杂,可实现对离子浓度和迁移率的调控。进而,利用人工突触器件10中的离子可模拟生物体中离子作用机制,实现器件仿生功能和提升器件性能。
在一实施例中,电极120的厚度为40nm-150nm。
其中,电极可由粘附层和惰性金属材料层组成,材料层位于惰性金属材料层靠近柔性衬底110的一侧。示例性的,粘附层的材料可为钛(Ti)、铬(Cr)、镍(Ni)或本领域技术人员可知的其他粘附性较好的导电材料;惰性金属材料层的材料可为金(Au)、铂(Pt)或本领域技术人员可知的其他惰性金属材料。如此,在确保电极120可较好的着力于柔性衬底110的同时,还可确保电极120的导电性良好。
其中,通过设置电极120的厚度在上述范围内,可确保电极120具有较好的附着力和良好的导电性。
示例性的,电极120的厚度范围还可为40nm-60nm;当电极120的厚度为60nm时,粘附层的厚度可为10nm,惰性金属材料层的厚度可为50nm。
在其他实施方式中,还可根据忆阻器以及基于该忆阻器的人工突触器件10的实际需求,设置电极120以及其中的粘附层和惰性金属层的厚度,本发明实施例对此不作限定。
在上述实施方式中,为了确保界面的稳定性以及各层材料的粘附性,还可对各层之间的界面进行调控。
在一实施例中,柔性衬底110表面采用等离子界面处理或者紫外亲水处理。
示例性的,在形成电极120之前,对柔性衬底110的表面进行等离子体界面处理,有利于增强电极120与柔性衬底110之间的附着力。在形成电极120之后,形成第一子层131之前,可对柔性衬底110进行等离子体亲水处理或者紫外亲水处理,以增强柔性衬底110的表面的亲水性,为形成第一子层131做准备,有利于增强第一子层131与柔性衬底110之间的附着力。
在其他实施方式中,还可采用本领域技术人员可知的其他方式(例如臭氧处理)进行界面处理,可根据人工突触器件10的实际需求选择,本发明实施例对此不作限定。
在一实施例中,柔性衬底110的材料包括具有柔性和生物兼容性的聚合物材料或生物材料。
示例性的,柔性衬底110可为聚酰亚胺(polyimide,PI)薄膜、聚对苯二甲酸乙二醇酯(Polyethylene terephthalate,PET)、天然生物材料薄膜或本领域技术人员可知的其他柔性可拉伸薄膜。
在一实施例中,柔性衬底110的厚度为10μm-20μm。
如此设置,可使柔性衬底110不会太薄而导致无法形成人工突触器件10的其他膜层结构,也不会太厚而在工艺过程中从硬质衬底上脱落。
需要说明的是,柔性衬底110的厚度还可为15μm、15μm-18μm或者本领域技术人员可知的其他数值或数值范围,可根据人工突触器件10的实际需求设置,本发明实施例对此不作限定。
本发明实施例提供的基于双层结构阻变层忆阻器的柔性人工突触器件,可从工作机制上对生物突触行为进行模拟,实现短程可塑性、长程可塑性和脉冲时间依赖可塑性等基本生物突触行为,可应用于神经网路计算和仿生感知系统的构建等领域。具体的,本发明实施例提供的基于双层结构阻变层忆阻器的人工突触器件,能够较好地模拟生物突触的工作机制,通过对上层材料的调控,可模拟生物体中不同种类的离子、生物配体等;下层材料也模拟细胞膜内生物受体的功能,从突触工作机制角度进行仿生设计。与传统忆阻器需要高电压诱导操作相比,该器件工作电压低,且能产生连续可以的导电状态,对模拟生物神经信号有较大优势。
基于同一发明构思,本发明实施例还提供一种人工突触器件的制备方法,该制备方法可用于形成上述实施方式提供的任一种人工突触器件。因此,该制备方法也具有上述实施方式中的人工突触器件所具有的技术效果,相同之处可参照上文对人工突触器件的解释说明进行理解,下文中不赘述。
示例性的,可参照图4,该人工突触器件的制备方法可包括:
S310、提供硬质衬底。
其中,硬质衬底起到支撑作用,为后续形成柔性衬底作准备。示例性的,硬质衬底可为玻璃衬底或本领域技术人员可知的其他材质的衬底,本发明实施例对此不赘述也不作限定。
S320、在硬质衬底一侧形成柔性衬底。
其中,可选用旋涂预制溶液并固化的方式形成柔性衬底。示例性的,可在硬质衬底上旋涂合适粘度的聚酰亚胺薄膜,使得固化后的聚酰亚胺薄膜厚度在10μm-20μm。本段中的“合适粘度”是指可实现聚酰亚胺薄膜的厚度范围在10μm-20μm内的粘度。
S330、在柔性衬底背离硬质衬底的一侧形成电极。
示例性的,可通过物理成膜方法或化学成膜方法形成电极。
S340、在电极背离柔性衬底一侧形成第一子层。
示例性的,可通过喷涂的方式形成第一子层。
S350、在第一子层背离柔性衬底一侧形成第二子层。
示例性的,可通过滴涂的方式形成第二子层。
S360、分离柔性衬底与硬质衬底。
至此,形成柔性人工突触器件。
示例性的,图5是对图4中示出的制备方法的进一步细化。参照图5,该人工突触器件的制备方法可包括:
S410、提供硬质衬底。
示例性的,该硬质衬底为玻璃衬底
S420、在硬质衬底一侧形成柔性衬底。
示例性的,柔性衬底的厚度为15μm。
S430、对柔性衬底表面进行等离子体界面处理。
示例性的,在S440中的溅射金属之前,将玻璃以及形成于其上的柔性衬底在氧气等离子体氛围中处理2分钟,以提高金属电极与柔性衬底的结合力。
S440、在柔性衬底背离硬质衬底的一侧形成电极。
示例性的,通过光刻、溅射或电子束蒸发的方法在柔性衬底上制备图案化电极,Ti/Au厚度分别为10nm和50nm,相对设置的两电极的边界之间限定的长度即沟道长度,该沟道长度为20μm。
S450、对柔性衬底表面进行等离子亲水处理或紫外亲水处理。
示例性的,将有图案化电极的样品通过紫外处理10分钟。
S460、在电极背离柔性衬底一侧形成第一子层。
示例性的,将功能化的二维材料(例如,还原氧化石墨烯分散液)喷涂于柔性衬底的表面。
S461、采用化学方法对第一子层的表面官能团进行调控,以及采用物理方法对第一子层的表面缺陷进行调控。
示例性的,将S460后形成的样品在在氩气(Ar)氛围中退火1个小时,以去除表面水汽,从而降低二维纳米片与电极的接触电阻。
其后,还包括:通过光刻、氧等离子刻蚀确定器件有源区,即隔离开各基于忆阻器的人工突触器件,以使得各器件之间相互电绝缘。
S470、在第一子层背离柔性衬底一侧形成第二子层。
示例性的,将PEO:LiClO
S480、分离柔性衬底与硬质衬底。
至此,形成柔性人工突触器件。
对本实施例中制备的忆阻器进行直流I-V测试,测试过程中一端电极接地,扫描顺序如图2所示,其中,箭头1-4所示方向为电压扫描方向。示例性的,器件电流遵循空间电荷限制电流的特点,此外,通过调节脉冲电压可以实现短程可塑性和长程可塑性之间的相互转变。
参照图3,显示了脉冲电压模式下,该器件电导的改变。如图3所示,当刺激脉冲作用之后,该器件的电导自发的恢复到原来状态,器件自恢复的过程类似于生物体中神经突触短程可塑,器件自恢复的过程的长期稳定性类似于生物体中神经突触长程可塑;由此表明本实施例中的忆阻器具备模拟生物突触的功能。
在上述实施方式的基础上,本发明实施例提供的任一种人工突触器件均可应用于类神经拟态器件、神经网络算法基本单元器件、智能仿生感知系统。
示例性的,该仿生感知系统可用于医疗康复领域或者类生命人机交互领域。本领域技术人员可理解,该仿生感知系统还可包括本领域技术人员可知的其他结构部件,本发明实施例对此不赘述也不作限定。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 人工突触器件和人工突触器件的制备方法
- 光电人工突触的制备方法以及光电人工突触