一种快速引导机械手抓取目标的视觉对位方法
文献发布时间:2023-06-19 11:00:24
技术领域
本发明属于机器视觉技术领域,具体来说,涉及一种快速引导机械手抓取目标的视觉对位方法。
背景技术
工业视觉CCD引导和定位,要求机器视觉系统能够快速准确的找到目标物并确认其物理位置,引导机械手臂或者轴模组准确抓取目标或上下料。目前,国内大多使用第三方机器视觉专用算法,并且偏向于底层或独立的单元运算,具体应用层面必须由现场开发工程师根据实际需求组合庞大的算子单元来实现。,
视觉引导对位的操作准备工作有:棋盘格畸变矫正→九点标定→旋转姿势中心拟合。其中棋盘格畸变矫正以及九点标定一般在视觉系统搭建之初就已经准备完成,属于标准操作内容。
第三步旋转姿势中心拟合需要根据不同的吸嘴(或者夹爪)和不同目标物吸取点,每次切换料号和吸嘴时,设备和软件要不停的做调试修正,属于操作复杂的步骤,尤其在吸嘴不在相机视野或者吸嘴是非标准规格异形件的情况下,这一步会变得极其困难。
图1示出了常规的旋转姿势中心算法,其通过产品放置的多点位置拟合圆心,如果件异形或者旋转拟合的圆弧过短,那么拟合的中心误差会很大,如果夹件不在相机视野范围内那么将无法计算。
发明内容
针对现有技术存在的旋转姿势中心拟合操作复杂、误差大的问题,本发明提供了一种快速引导机械手抓取目标的视觉对位方法,该方法兼容性强、操作简单,能够减少设备调试时间,提升机械手抓取效率和精度。
为实现上述技术目的,本发明采用的技术方案如下:
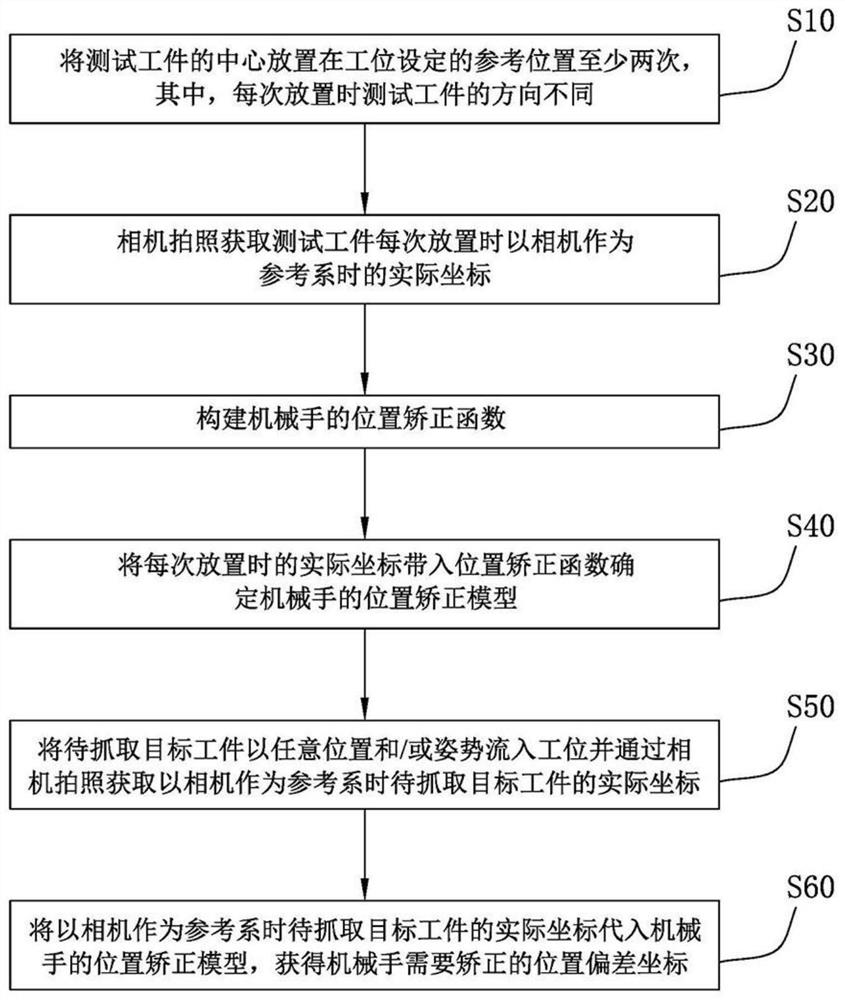
一种快速引导机械手抓取目标的视觉对位方法,包括:
将测试工件的中心放置在工位设定的参考位置至少两次,其中,每次放置时测试工件的方向不同;
相机拍照获取测试工件每次放置时以相机作为参考系时测试工件的实际坐标;
构建机械手的位置矫正函数;
将每次放置时的实际坐标带入位置矫正函数确定机械手的位置矫正模型;
将待抓取目标工件以任意位置和/或姿势流入工位并通过相机拍照获取以相机作为参考系时待抓取目标工件的实际坐标;
将以相机作为参考系时待抓取目标工件的实际坐标代入机械手的位置矫正模型,获得机械手需要矫正的位置偏差坐标。
进一步限定,所述“将测试工件的中心放置在工位设定的参考位置至少两次,其中,每次放置时测试工件的方向不同”包括:
第一次放置,将测试工件的中心放置在工位设定的参考位置;
第二次放置,直接将第一次放置的测试工件以中心做第一次旋转角度θ
第三次放置,直接将第一次放置的测试工件以中心做第二次旋转角度θ
依次类推,第n+1次放置,直接将第一次放置的测试工件以中心做第n次旋转角度θ
其中n≥1,θ
进一步限定,所述构建机械手的位置矫正函数包括:
建立如下的n个方程组:
其中,i=1,2…n,M
进一步限定,所述将每次放置时的实际坐标带入位置矫正函数确定机械手的位置矫正模型包括:
获取测试工件每一次放置时以相机作为参考系时的实际坐标(x
将坐标(x
利用最小二乘法求得M
将M和N代入下式获得机械手的位置矫正模型:
其中,(x
进一步限定,所述测试工件仅进行两次放置。
进一步限定,旋转角度θ
本发明相比现有技术,简化了吸嘴旋转姿态中心拟合这一步骤,重复学习实际产品吸取和放置姿态2次,直接计算出相对偏差值的位置信息等相关参数,省略了以前需要识别目标物几何特征,吸嘴的几何特征的过程,也不需要重建机械手臂或者轴模组的物理工具坐标系,更无需对世界坐标和各种工具坐标做各种复杂变换。
附图说明
图1为旋转姿势中心算法中多点位置拟合圆心的示意图;
图2为本发明的角度学习示意图;
图3为本发明快速引导机械手抓取目标的视觉对位方法流程图;
图4为测试工件放置多次不同方位的流程图。
具体实施方式
为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。
参阅图3所示,一种快速引导机械手抓取目标的视觉对位方法,包括如下步骤:
S10:将测试工件的中心放置在工位设定的参考位置至少两次,其中,每次放置时测试工件的方向不同。
该步骤中,如图4所示,至少两次放置的第一次放置是将测试工件的中心放置在工位设定的参考位置。
第二次放置可以将第一次放置的测试工件以中心(或者设定的参考位置)做第一次旋转角度θ
在有必要的情况下,可以进行更多次数的放置,比如第三次放置直接将第一次放置的测试工件以中心做第二次旋转角度θ
第n+1次放置直接将第一次放置的测试工件以中心做第n次旋转角度θ
上述多次放置中的旋转操作中,各个旋转角度θ
S20:相机拍照获取测试工件每次放置时以相机作为参考系时的实际坐标
假设初始位置的坐标为(x,y),每次经过圆心(x
x'=(x-x
y'=(y-y
S30:构建机械手的位置矫正函数
假设测试工件第一次放置时以相机作为参考系时的实际坐标为(x
假设机械手需要经过矫正取料的位置偏差坐标为(x
x
y
其中旋转中心为(x
由于x
x
y
在步骤S10每一次旋转操作中,x
其中,i=1,2…n,,因此(7)式有n个方程组,M
S40:将每次放置时的实际坐标带入位置矫正函数确定机械手的位置矫正模型
获取测试工件每一次放置时以相机作为参考系时的实际坐标(x
若所述测试工件仅进行两次放置,如图2所示,也就是旋转操作仅一次,那么(7)式可以变化成最简单的方程组:
根据(8)式可以很简单的解出未知参数M和N。
若两次放置的方式中,第一次旋转角度θ
若要获取更高的抓取精度,测试工件可以多进行几次放置,比如5次,也就是旋转操作4次,那么可以直接利用(7)式解出M
利用最小二乘法求得M
针对不同情况解出的M和N,均可以代入(10)式获得机械手的位置矫正模型:
其中,((
S50:将待抓取目标工件以任意位置和/或姿势流入工位并通过相机拍照获取以相机作为参考系时待抓取目标工件的实际坐标(x',y')
该坐标(x',y')表示待抓取目标工件以相机作为参考系的相对坐标。
S60:将以相机作为参考系时待抓取目标工件的实际坐标(x',y')代入机械手的位置矫正模型(10)中,就能够获得机械手需要矫正的位置偏差坐标(x
此时机械手或者轴模组可以根据位置偏差坐标(x
以上对本申请提供的一种快速引导机械手抓取目标的视觉对位方法进行了详细介绍。具体实施例的说明只是用于帮助理解本申请的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本申请原理的前提下,还可以对本申请进行若干改进和修饰,这些改进和修饰也落入本申请权利要求的保护范围内。
- 一种快速引导机械手抓取目标的视觉对位方法
- 一种视觉引导下的香烟烟支抓取机械手