一种机器人运行轨迹规划装置及方法
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及轨迹规划领域,特别是涉及一种机器人运行轨迹规划装置及方法
背景技术
目前多轴工业机器人在运行前,需要花费人工长时间进行产前操作机器人示教器预先示教及编程,并进行每个轨迹点示教学习,从而导致机器人在非标及中小批量产线生产的过程中难以实现高效率工作;再有利用三维离线建模仿真及编程,将产品工件运行轨迹规划好再导入机器人系统中进行运行,使得在非标及中小批量产线生产过程中更加难以提高机器人运行效率,由于操作人必须具备三维设计作图能力,还需要熟练使用机器人离线仿真及编程系统,才能使机器人进行上述操作,因此人员需要一定的技术经验,一般操作人员无法胜任此工作。用其上方法一般熟练的操作人员,操作机器人示教器进行示教及编程或离线建模仿真及编程,其完成产前100个轨迹点用时在4小时以上,而机器人正式运行时间常小于10分钟,因此机器人一般都在长时间的产前待机状态中,无法真正的提高机器人运行使用效率。
发明内容
本发明的目的是提供一种机器人运行轨迹规划装置及方法,提高了机器人的产前轨迹规划速度。
为实现上述目的,本发明提供了如下方案:
一种机器人运行轨迹规划装置,包括:三维空间定位器、工具模型和上位机;
所述工具模型为待运行机器人的执行器模型,所述工具模型与所述三维空间定位器连接;
通过移动所述三维空间定位器获取所述工具模型的运行轨迹,所述工具模型的运行轨迹为待运行机器人的运行轨迹。
可选地,所述装置还包括:光电发射器,所述光电发射器设置在机器人工作范围上方;
所述三维空间定位器包括光电二极管和处理器,所述上位机分别与所述光电发射器和所述三维空间定位器电连接;所述光电发射器接收所述上位机发射的同步信号后对所述机器人工作范围进行空间扫描,所述三维空间定位器接收到所述上位机发射的同步信号后接收所述光电发射器的扫描信号,所述三维空间定位器根据接收到的扫描信号确定所述三维空间定位器的位置坐标,所述三维空间定位器将所述位置坐标发送到上位机。
可选地,所述三维空间定位器还包括外壳,所述光电二极管均为设置在所述外壳上。
可选地,所述光电二极管数量至少为6个。
可选地,所述三维空间定位器还包括MEMS陀螺仪,所述MEMS陀螺仪用于获取所述三维空间定位器围绕X轴、Y轴和Z轴的旋转值。
本发明还公开了一种机器人运行轨迹规划方法,所述方法包括:
将工具模型与三维空间定位器连接;所述工具模型为待运行机器人的执行器模型;
通过移动三维空间定位器获取所述工具模型的运行轨迹;
将所述工具模型的运行轨迹作为待运行机器人的运行轨迹。
可选地,所述通过移动三维空间定位器获取所述工具模型的运行轨迹,具体包括:
通过上位机向光电发射器和三维空间定位器发送同步信号;
所述光电发射器接收到所述同步信号后在待运行机器人工作范围内进行周期性空间扫描;
将所述三维空间定位器在所述待运行机器人工作范围内进行移动;
所述三维空间定位器接收到所述同步信号后开始接收所述光电发射器发射的光信号;
根据三维空间定位器接收到的所述光信号确定所述三维空间定位器的位置坐标;
根据所述位置坐标随时间变化确定所述工具模型的运行轨迹。
可选地,所述光电发射器接收到所述同步信号后在待运行机器人工作范围内进行周期性空间扫描,具体包括:所述光电发射器在待运行机器人工作范围内进行行周期性扫描和列周期性扫描。
可选地,所述根据三维空间定位器接收到的所述光信号确定所述三维空间定位器的位置坐标,具体包括:
通过行周期性扫描获得所述光电发射器与所述三维空间定位器之间的X向量角度;
通过列周期性扫描获得所述光电发射器与所述三维空间定位器之间的Y向量角度;
通过所述X向量角度和Y向量角度确定所述三维空间定位器的位置坐标。
可选地,所述根据三维空间定位器接收到的所述光信号确定所述三维空间定位器的位置坐标,具体还包括:
通过所述三维空间定位器内的MEMS陀螺仪确定所述三维空间定位器围绕X轴、Y轴和Z轴的旋转值。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明公开了一种机器人运行轨迹规划装置及方法,通过移动三维空间定位器,获取与三维空间定位器连接的工具模型的运行轨迹,将工具模型的运行轨迹作为待运行机器人的运行轨迹,提高了机器人的运行轨迹规划速度,从而提高了机器人运行使用效率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为本发明一种机器人运行轨迹规划装置结构示意图;
图2为本发明一种机器人运行轨迹规划装置中三维空间定位器的结构示意图;
图3为本发明中待运行机器人的结构示意图;
图4为本发明一种机器人运行轨迹规划装置各结构信号传输示意图;
图5为本发明一种机器人运行轨迹规划方法流程示意图;
符号说明:
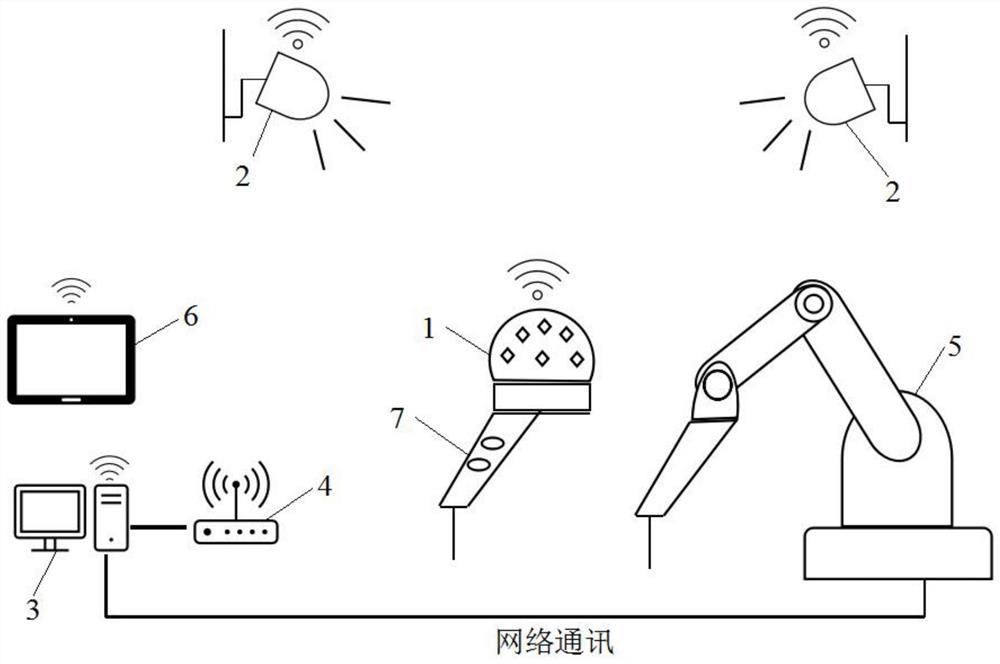
1-三维空间定位器,2光电发射器,3-上位机,4-无线网关控制模块,5-待运行机器人,6-交互显示终端,7-工具模型,11-光电二极管,12-外壳,13-法兰座,71-工具模型末端,72-曲线功能按钮,73-点功能按钮,51-机器人工具法兰,52-机器人工具,53-机器人工具末端。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种机器人运行轨迹规划装置及方法,提高了机器人的运行轨迹规划速度。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
图1为本发明一种机器人运行轨迹规划装置结构示意图,如图1所示,一种机器人运行轨迹规划装置,包括:三维空间定位器1、工具模型7、上位机3、光电发射器2、交互显示终端6和无线网关控制模块4。
所述工具模型7为待运行机器人5的执行器模型,所述工具模型7与所述三维空间定位器1连接。
通过移动所述三维空间定位器1获取所述工具模型7的运行轨迹,所述工具模型7的运行轨迹为待运行机器人5的运行轨迹。
所述光电发射器2设置在机器人工作范围上方;
所述三维空间定位器1包括光电二极管11和处理器,所述上位机3分别与所述光电发射器2和所述三维空间定位器1电连接;所述光电发射器2接收所述上位机3发射的同步信号后对所述机器人工作范围进行空间扫描,所述三维空间定位器1接收到所述上位机3发射的同步信号后接收所述光电发射器2的扫描信号,所述三维空间定位器1根据接收到的扫描信号确定所述三维空间定位器1的位置坐标,所述三维空间定位器1将所述位置坐标发送到上位机3。
所述三维空间定位器1还包括外壳12,所述光电二极管11均为设置在所述外壳12上,如图2所示。所述三维空间定位器1为手持式三维空间定位器1,即所述三维空间定位器1通过人为移动而移动。
所述三维空间定位器1还包括MEMS陀螺仪(微机械陀螺仪),所述MEMS陀螺仪用于获取所述三维空间定位器1围绕X轴、Y轴和Z轴的旋转值。
三维空间定位器1还包括法兰工具连接器(法兰座13),操作功能按钮键、无线通讯模块、电源管理模块和充电电池,三维空间定位器1中处理器为微处理器,操作功能按钮键包括曲线功能按钮72和点功能按钮73。
所示工具模型7是指机器人末端法兰安装的生产或加工的执行器,如机器人弧焊焊枪、机器人夹爪等连接在机器人末端法兰上具有一定功能的工具,如图3所示,所述工具模型7与机器人末端法兰安装的真实工具在尺寸和外围结构上保持一致,工具模型7与实际运行的执行器比例为1:1,工具模型7由3D打印的塑料件组成并安装于手持式无线三维空间定位器1的法兰处。工具模型7轻便便于人工手持规划工件路径。本实施例中图2中工具模型7与图3中机器人工具52比例为1:1,通过移动三维空间定位器1获取工具模型7的运行轨迹,即获得机器人工具52的运行轨迹,图3中机器人工具末端53按照图2中工具模型末端71的运行轨迹进行运行。
待运行机器人5是通用型多关节6自由度机械臂,其功能是通过PC主机TCP/IP通讯将人工在工件上规划好的轨迹按预先要求的顺序及条件,依次控制机器人进行工作动作。
图4为本发明一种机器人运行轨迹规划装置各结构信号传输示意图,如图4所示,所述无线网关控制模块4通过USB接口与PC主机相互通讯连接,所述无线网关控制模块4通过无线通讯与光电发射器2及手持式无线三维空间定位器1相互连接。由2个或2个以上所述光电发射器2组成一个范围空间组,光电发射器2在手持式无线三维空间定位器1的运动空间能通过光电发射器2发射行列扫描的脉冲光束覆盖的地方进行固定安装,手持式无线三维空间定位器1通过6个或6个以上光电二极管11接收光电发射器2的行列扫描光束并通过无线通讯与无线网关控制模块4相互通讯连接,交互显示终端6通过无线通讯与PC主机相互连接,所述机器人通过TCP/IP通讯网络与PC主机相连接。
图5为本发明一种机器人运行轨迹规划方法流程示意图,如图5所示,一种机器人运行轨迹规划方法包括以下步骤:
步骤100:将工具模型7与三维空间定位器1连接;所述工具模型7为待运行机器人5的执行器模型。
步骤200:通过移动三维空间定位器1获取所述工具模型7的运行轨迹。
所述通过移动三维空间定位器1获取所述工具模型7的运行轨迹,具体包括:
通过上位机3向光电发射器2和三维空间定位器1发送同步信号。
所述光电发射器2接收到所述同步信号后在待运行机器人5工作范围内进行周期性空间扫描。
所述光电发射器2接收到所述同步信号后在待运行机器人5工作范围内进行周期性空间扫描,具体包括:所述光电发射器2在待运行机器人5工作范围内进行行周期性扫描和列周期性扫描。
将所述三维空间定位器1在所述待运行机器人5工作范围内进行移动。
所述三维空间定位器1接收到所述同步信号后开始接收所述光电发射器2发射的光信号。
根据三维空间定位器1接收到的所述光信号确定所述三维空间定位器1的位置坐标。
所述根据三维空间定位器1接收到的所述光信号确定所述三维空间定位器1的位置坐标,具体包括:
通过行周期性扫描获得所述光电发射器2与所述三维空间定位器1之间的X向量角度。
通过列周期性扫描获得所述光电发射器2与所述三维空间定位器1之间的Y向量角度。
通过所述X向量角度和Y向量角度确定所述三维空间定位器1的位置坐标。
通过所述三维空间定位器1内的MEMS陀螺仪确定所述三维空间定位器1围绕X轴、Y轴和Z轴的旋转值。
根据所述位置坐标随时间变化确定所述工具模型7的运行轨迹。
步骤300:将所述工具模型7的运行轨迹作为待运行机器人5的运行轨迹。
所示上位机3为PC主机,用于处理通过无线网关控制模块4接收来自光电发射器2与手持式三维空间定位器1之间同步信号、计算手持式无线三维空间定位器1法兰坐标系与机器人法兰末端坐标系之间动作运行关系、执行轨迹运行作业任务和处理与机器人之间基于TCP/IP通讯协议。
交互显示终端6通过无线通讯与PC主机进行UI界面交互操作。
本实施例中交互显示终端6为平板电脑。
无线网关控制模块4用于手持式无线三维空间定位器1与多个光电发射器2无线通讯连接。
光电发射器2接收PC主机通过无线网关模块发出的同步信号,接收到同步信号后光电发射器2驱动红外发光管由行扫偏正镜和列扫偏振镜进行周期空间扫描。
手持式无线三维空间定位器1接收PC主机通过无线网关模块通讯发出的同步信号,手持式无线三维空间定位器1接收到同步信号后,由光电二极管11开始接收光电发射器2行列扫描一个周期内的触发时间,根据触发时间得出行扫描时间点对应手持式无线三维空间定位器1的光电二极管11的X向量角和Y向量角,根据X向量角和Y向量角换算出手持式无线三维空间定位器1在光电发射器2空间的绝对坐标点(x,y,z),通过MEMS陀螺仪模块输出的欧拉角进行三维坐标矩阵转换得出手持式无线三维空间定位器1于光电发射器2的空间当前坐标点(x,y,z,Rx,Ry,Rz),将当前坐标点以数组的形式由手持式无线三维空间定位器1无线模块实时发送至PC主机。
下面以具体实施例说明本发明一种机器人运行轨迹规划方法。
Step1:将光电发射器2固定安装于机器人两侧5米内并俯视于机器人工作范围60-80度角度支架上。
光电发射器2接收PC主机通过无线网关模块通讯发出的同步信号,然后驱动光电发射器2中的红外发光管由行扫偏正镜和列扫偏振镜在机器人工作范围内进行红外光行扫描和列扫描的周期扫描,形成以光电发射器2为参考点的红外光线行列立体扫描空间,得到一组固定同步周期的行扫描和列扫描的红外线发射信号。
Step2:手持式无线三维空间定位器1接收PC主机通过无线网关模块通讯发出的与光电发射器2对应的同步信号,然后由手持式无线三维空间定位器1上的光电二极管11开始接收光电发射器2行扫描和列扫描一个同步周期内的触发同步时间。
首先触发得到光电发射器2行扫描点的时间对应手持式无线三维空间定位器1上的接收光电二极管11的X向量角,由手持式无线三维空间定位器1上的接收光电二极管11从同步信号直到接收信号触发时的时间计算出光电发射器2与手持式无线三维空间定位器1的向量角,计算出光电发射器2与手持式无线三维空间定位器1之间的夹角角度得出手持式无线三维空间定位器1X向量角度。
同时继续手持式无线三维空间定位器1上的光电二极管11接收触发得到光电发射器2列扫描点的时间对应手持式无线三维空间定位器1上的接收光电二极管11的Y向量角,由手持式无线三维空间定位器1上的接收光电二极管11从同步信号直到接收信号触发时的时间计算出光电发射器2与手持式无线三维空间定位器1的向量角,计算出光电发射器2与手持式无线三维空间定位器1之间的夹角角度,得出手持式无线三维空间定位器1的Y向量角度。由手持式无线三维空间定位器1上的接收光电二极管11所接收到的一组光电发射器2同步信号所产生的X向量角度和Y向量角度,由X向量角度和Y向量角度与线性代数计算得出手持式无线三维空间定位器1在光电发射器2行扫描和列扫描空间内的x,y,z坐标点。
手持式无线三维空间定位器1内微处理器采集MEMS陀螺仪模块的数据,首先利用MEMS陀螺仪模块内的三轴陀螺仪信号,采用四元数的姿态表达式,积分求得姿态角,然后采用MEMS陀螺仪模块内三轴加速度计和三轴磁力计,利用大地磁场和重力磁场在地理坐标系和运动坐标系之间的方向余弦进行绝对角度的解算,然后采用卡尔曼滤波进行前三者数据和x,y,z坐标点数据融合,生成手持式无线三维空间定位器1相对于光电发射器2的空间当前坐标点x,y,z,Rx,Ry,Rz,将当前坐标点x,y,z,Rx,Ry,Rz以数组的形式由手持式无线三维空间定位器1无线模块实时发送至PC主机。
另外,手持式无线三维空间定位器1三维空间坐标点形成,具体包括:光电发射器2接收PC端发出的同步信号,同步信号下降沿时行偏振镜上的红外发射管开启进行行扫描空间扫描A一个周期,行空间扫描结束后关闭行扫描红外发射管后同时开启列偏振镜上的红外发射管进行列扫描空间扫描B一个周期,列空间扫描结束后关闭列扫描红外发射管后再同时开启行扫描红外发射管进行相同的下一个周期运行。手持式无线三维空间定位器1接收PC端发出的同步信号,同步信号下降沿时开启手持式无线三维空间定位器1光电接收二极管,在与光电发射器2的同一个A周期内检测由光电发射器2行扫描到达的时间,行扫描结束后再由光电二极管11接收,在与光电发射器2的同一个B周期内检测由光电发射器2列扫描到达的时间,将光电发射器2行列扫描中由光电接收二极管接收的触发行列扫描时间进行手持式无线三维空间定位器1内的微处理器进行计算由接收触发的同步时间点可计算出手持式无线三维空间定位器1的行扫描X向量角和列扫描Y向量角,根据X向量角和Y向量角可计算出三维坐标系的x,y,z在光电发射器2绝对空间当前坐标点x,y,z位置坐标后,手持式无线三维空间定位器1内微处理器采集MEMS陀螺仪模块的数据,首先利用MEMS陀螺仪模块内的三轴陀螺仪信号,采用四元数的姿态表达式,积分求得姿态角,然后采用MEMS陀螺仪模块内三轴加速度计和三轴磁力计,利用大地磁场和重力磁场在地理坐标系和运动坐标系之间的方向余弦进行绝对角度的解算,然后采用卡尔曼滤波进行前三者数据和x,y,z坐标点数据融合,生成手持式无线三维空间定位器1相对于光电发射器2的空间当前坐标点x,y,z,Rx,Ry,Rz。
手持式无线三维空间定位器1与机器人用户坐标原点校准过程具体包括:将机器人携带工具按常规操作进行用户坐标示教,确认用户坐标后将机器人携带的工具卸下后再将手持式无线三维空间定位器1安装于机器人法兰末端处并将机器人操作运动至机器人用户坐标(user)x=0,y=0,z=0,Rx=0,Ry=0,Rz=0的位姿处,通过手持式无线三维空间定位器1上按钮键(原点)按钮事件发送至PC主机将手持式无线三维空间定位器1的当前坐标值相减计算出手持式无线三维空间定位器1当前坐标值与机器人用户坐标(user)值相等。
将光电式发射器定位安装于机器人两侧周围并俯视于机器人工作范围角度连接固定架上,开启PC主机、光电式发射器、手持式无线三维空间定位器1、交互显示终端6,交互显示终端UI界面设备状态栏内光电发射器2、手持定位器通讯连接指示灯亮。
手持式无线三维空间定位器1的光电式二极管将光电式发射器发出的脉冲光信号接收与MEMS陀螺仪模块运算,计算出手持式无线三维空间定位器1当前坐标点x,y,z,Rx,Ry,Rz,交互显示终端UI界面手持轨迹规划定位器当前位置栏内x,y,z,Rx,Ry,Rz轨迹坐标点随手持式无线三维空间定位器1移动而变化数值,将手持式无线三维空间定位器1安装于机器人工具法兰51处通过手持式无线三维空间定位器1上按钮键(原点)长按数秒待交互显示终端UI界面状态显示栏内原点指示灯亮原点校准正常,按机器人加工工艺设置交互显示终端UI界面轨迹规划设置栏内数值,交互显示终端UI界面机器人通讯连接、设置IP地址值、设置端口值、设置速度值,用户手持无线三维空间定位器1的工具模型7的末端点来对准运行给定机器人运行待加工的产品工件进行轨迹路径记录,执行操作手持式无线三维空间定位器1点、曲线等功能按钮键进行机器人待加工的产品工件按机器人要求的动作顺序和运动轨迹操演一遍进行轨迹规划,其点功能是点位型生成轨迹点只控制机器人由一点到另一点的准确定位,一般于机床上下料、点焊和一般搬运、装卸等作业;曲线功能是连续轨迹型可控制机器人按复杂的非直线型轨迹给定轨迹运动,适用于连续焊接和涂装等作业。将手持式无线三维空间定位器1运算采集到的当前三维轨迹坐标点x,y,z,Rx,Ry,Rz数据实时发送至PC电脑,PC电脑建立一个文件,将x,y,z,Rx,Ry,Rz+点特征值+曲线特征值+运行速度值等逐条写入文件中,交互显示终端UI界面新建文件名栏内数据逐条显示当前轨迹规划数据,交互显示终端UI界面三维轨迹图显示实时生成的轨迹仿真图,交互显示终端UI界面选择文件栏选择文件点击发送至机器人通讯,机器人接收数据执行轨迹规划路径运行进行工件产品加工。
在检测到所述手持式无线三维空间定位器1操作按钮键事件记录当前运行的实时轨迹点x,y,z,Rx,Ry,Rz数据,由所述手持式无线三维空间定位器1无线通讯模块发送所述PC电脑进行处理生成工业机器人运行格式的轨迹文件,由所述交互显示终端UI显示、设置、调用、操作界面进行文件操作由基于TCP/IP通讯协议的网络与工业机器人网络接口连接发送文件驱动工业机器人执行轨迹运动。
本发明在100mm的焊缝上可以在小于一分钟时间内规划数千个精准轨迹点,完全解决提高机器人在非标及小批量件生产应用领域中轨迹规划的效率及精度来提高机器人焊接工作时间问题。
本发明能使机器人在工作状态下不停机进行下一道工序的预先快速轨迹规划,以达到机器人在非标生产领域加工的满负荷高效率的运行。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种动态调整机器人运行速度的轨迹规划方法及装置
- 一种动态调整机器人运行速度的轨迹规划方法及装置