盘扣脚手架立杆装箱机
文献发布时间:2023-06-19 11:03:41
技术领域
本发明与盘扣脚手架立杆装箱机有关,尤其与扣盘脚手架构件装箱装置有关。
背景技术
己有的盘扣脚手架立杆装箱机,包括机器人、工件箱和立杆输送装置,立杆输送装置包括机架、传动装置和导向装置,机架由左、右框架组成,左框架的上面的导向装置的四条第1纵向支撑条位于同一平面 ,四条第1纵向支撑条构成 两个同向、左窄右宽的第1、2梯形,传动装置位于上述平面之下,右框架的左端与其上面的顶升架铰连接,顶升架的上面的导向装置的四条纵向第2支撑条位于同一平面,四条第2纵向支撑条构成两个同向、左窄右宽的第3、4梯形,第1、3梯形端口对接,第2、4梯形端口对接,顶升架的右端与油缸的活塞杆铰连,传动装置包括电机,电机的动力输出轴上的主动轮与机架上的第1从动轴上的第1从动轮通过传动带传动连接,机架上的第1从动轴上的第2、3从动轮分别与机架上的第2从动轴上的第4、5从动轮通过齿形输送带传动连接,齿形输送带的齿伸出第1纵向支撑条构成的平面,立杆横放于第2纵向支撑条所在的平面上,立杆中间自带的两法兰盘分别位于第3、4梯形中,当顶升架的右端被油缸顶升,立杆中间的两法兰盘进入第1、2梯形,立杆被齿形输送带推送,走出第1、2梯形左端到机架上预定工位,工件到位的信号反馈到设备的电脑控制系统,机器人自动抓取横杆到工件箱,同时与电脑控制系统连接的计数器进行计数处理。
上述装置的缺点如下:
1.立杆堆放在顶升架右端,顶升架右端被油缸顶升后,立杆经导向装置滚动到左端后,进入传动装置时立杆堆放混乱,不能按节拍被齿形输送带推送进行分拣工件,需要人工整理,输送效率低。
2.立杆全部堆放在顶升架上通过滚动到达齿形带上向后输送,忽略了工地上回来的有弯曲、破损的立杆需要拣出来,在输送带上及斜面上拾取弯曲、破损的立杆可能被后面滚动下来的立杆碰伤。
发明内容
本发明的目的是提供一种输送效率高,到位准确,为机器人工作创造了必要的条件,装箱效率高的盘扣脚手架立杆装箱机。
本发明是这样实现的:
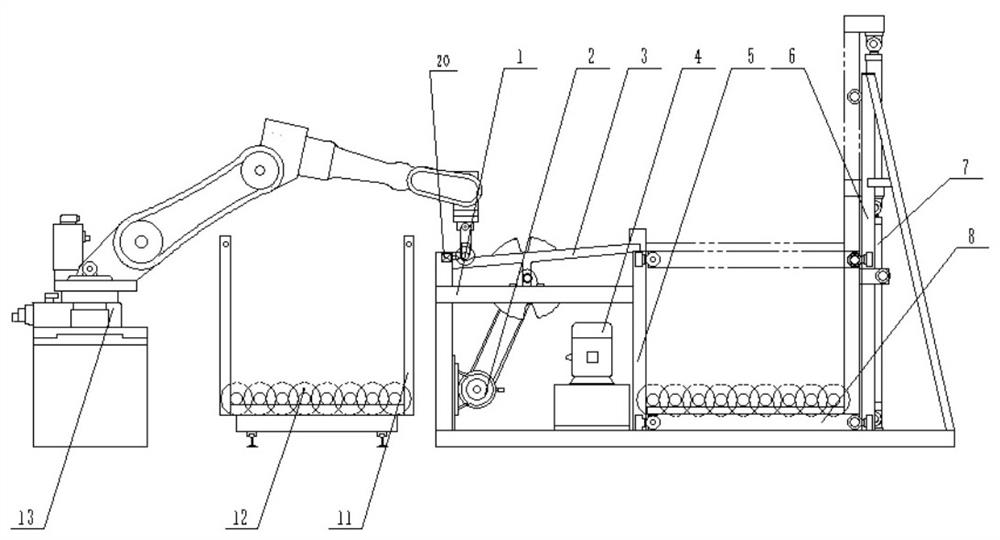
盘扣脚手架立杆装箱机,机架1的左部有第1、2横梁29、28与若干向左下倾的滑轨3的两端连接,滑轨3的下面有支撑于机架上的轴承的拨轮轴与减速机输出轴传动连接,减速机输入轴与电机动力轴传动连接,拨轮轴上有两并联的拨轮17分别位于相邻的两滑轨3之间的空间,拨轮17的周边有至少一个同相的缺口与立杆12的外径配合,机架1的右部有两第1导向轨5、两第2导向轨6,提升箱8的平台18的一端与两立柱30连接,平台18的左角有第1、2挡轮分别与第1导向轨5的两侧面滑动配合,平台的右角有第3、4、5挡轮分别与第2导向轨6的三侧面滑动配合,立柱30的中部有第6、7挡轮分别与第2导向轨6的两侧面滑动配合,连接两立柱30的上端的第3横梁中部有上支座21与油缸7的上端铰连,油缸7的下端与机架1的底座上的下支座22铰连,第2横梁28的右侧机架上有定位桩9,定位桩由支撑座24、定位管25组成,支撑座24组焊在机架1上,定位管25竖向面与立杆12的套筒26端面接触定位。
滑轨3的左端有与立杆配合的槽,机架左端立杆上端有限位器20当立杆进入滑轨左端滑轨槽27中,工件到位的信号由限位器20发送至机器人,机器人抓取工件。
本发明为解决立杆装箱设计的立杆装箱机,装箱机的工作流程:同规格立杆用吊装设备按要求位置装入提升箱8,装料提升箱可根据立杆12的码放的高度启动油缸7将装料提升箱内的立杆12顶到需要的工作位置,由人将立杆12拨动到滑轨3上,经定位桩9定位后沿滑轨3向下滚动到拨轮17的缺口弧边位置,拨轮17在圆周上有2个对称的凹槽,拨轮旋转转动到凹槽与立杆交汇处,立杆通过斜面滚动到拨轮凹槽中通过拨轮旋转向下输送,因凹槽一次只能进一个立杆,其余被拨轮弧边挡住,当缺口到达下斜面,立杆经滑轨向下滚动,立杆12进入滑轨预定位置,立杆12到位的信号反馈到设备的电脑控制系统,机器人自动抓取立杆12到工件箱11,同时进行计数处理。
本发明的优点如下:
本发明用油缸将提升箱的平台提升,使放置于平台上的盘扣脚手架立杆的水平位置与滑轨3高端位置基本相同,人工很容易将盘扣脚手架立杆从提升箱的平台提到与滑轨3高端相近的定位桩9上定位,经定位桩定位后立杆沿滑轨3向下滚动到拨轮17的缺口弧边位置,立杆通过斜面滚动到拨轮凹槽中通过拨轮旋转向下输送,因凹槽一次只能进一个立杆,其余被拨轮弧边挡住,当缺口到达下斜面,立杆经滑轨向下滚动,立杆12进入滑轨预定位置,立杆12到位的信号反馈到设备的电脑控制系统,机器人自动抓取立杆12到工件箱11,同时进行计数处理。立杆在定位时可除去不合格件。盘扣脚手架立杆输送效率高,到位准确,为机器人工作创造了必要的条件,码放吊装方便、快捷、准确,装箱效率高、规范整齐。
本发明与背景技术中的立杆装箱机相比,减轻了操作者的劳动强度,保证人身安全,输送效率提高1-1.5倍。
附图说明
图1为本发明的主视图。
图2为图1的俯视图。
图3为图1的左视图。
图4为传动装置的主视图。
图5为装料提升箱的主视图。
图6为装料提升箱的俯视图。
图7为立杆的主视图。
图8为定位桩的主视图。
图9为滑轨的主视图。
具体实施方式
盘扣脚手架立杆装箱机,机架1的左部有第1、2横梁29、28与若干向左下倾的滑轨3的两端连接,滑轨3的下面有支撑于机架上的轴承的拨轮轴与减速机输出轴传动连接,减速机输入轴与电机动力轴传动连接,拨轮轴上有两并联的拨轮17分别位于相邻的两滑轨3之间的空间,拨轮17的周边有至少一个同相的缺口与立杆12的外径配合,机架1的右部有两第1导向轨5、两第2导向轨6,提升箱8的平台18的一端与两立柱29连接,平台18的左角有第1、2挡轮分别与第1导向轨5的两侧面滑动配合,平台的右角有第3、4、5挡轮分别与第2导向轨6的三侧面滑动配合,立柱30的中部有第6、7挡轮分别与第2导向轨6的两侧面滑动配合,连接两立柱30的上端的第3横梁中部有上支座21与油缸7的上端铰连,油缸7的下端与机架1的底座上的下支座22铰连,第2横梁28的右侧机架上有定位桩9,定位桩由支撑座24、定位管25组成,支撑座24组焊在机架1上,定位管25竖向面与立杆12的套筒26端面接触定位。
滑轨3的左端有与立杆配合的槽,机架左端立杆上端有限位器20当立杆进入滑轨左端滑轨槽27中,工件到位的信号由限位器20发送至机器人,机器人抓取工件。
图4 拨轮传动装置说明:电机经减速机14减速后通过主动轮23经传动带15带动从动轮16转动,从而同时带动拨轮17转动,拨轮上有两个对称布置的缺口,缺口只允许一根工件进入,当拨轮转动时带动进入缺口的工件沿滑轨3滚动到预定位置。
图5、图6装料提升装置说明:装料提升装置由装料提升箱8、油缸7、上支座21、下支座22、组合而成;上支座21、组焊在装料提升箱3上,下支座22组焊在机架1上。启动油缸7将装料提升箱8通个导向轨5、导向轨6上下滑动,装料提升箱8上层装有2组6个挡轮19、下层装有4组8个挡轮19,挡轮19均组焊在装料提升箱8的上、下两层上,导向轨5、导向轨6、组焊在机架1上。
图8定位桩说明:定位桩由支撑座24、定位管25组成,支撑座24组焊在机架1上。
- 盘扣脚手架立杆装箱机
- 盘扣脚手架立杆装箱机