一种新型机器人底盘
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及机器人底盘技术领域,特别涉及一种新型机器人底盘。
背景技术
现有的物流机器人,AGV,巡逻机器人等产品的自主巡航均采用了基于地面标记物(磁条,磁钉,地纹或二维码)的定位导航技术方案,该方案原理是固定在车体的传感器通过感知地面标记物来确定机器人底盘的位置或读取下一步的操作指令。
但是,现有的方案都是将传感器刚性固定在底部,这样做有两个较大的缺点:(1)车身在行走中的抖动,负载变化时离地间隙变化等对传感器定位和读取指令有较大负面影响;(2)在行驶过程中,会遇到地面的障碍物,磕碰到传感器,会对传感器造成损伤。
发明内容
本发明的目的是提供一种新型机器人底盘,克服了车身在行走中因抖动、地面不平整等因素对传感器定位的影响,具有定位精度高,误差小,稳定性好,使用寿命长,防撞等优点。
本发明的上述技术目的是通过以下技术方案得以实现的:
一种新型机器人底盘,包括机器人车体和安装在机器人车体上的定位传感器,所述定位传感器安装在传感器固定台上,所述传感器固定台通过悬挂装置与机器人车体连接,所述机器人车体上还设有用于测量传感器固定台与机器人车体间相对位移的测量装置。
通过采用上述技术方案,机器人在行走的过程中,安装在机器人车体上的定位传感器通过感知地面标记物来确定机器人底盘的位置,悬挂装置将传感器固定台和机器人车体连接,使得传感器固定台只能沿预定的方向运动,同时,测量装置实时测量因机器人行走时底盘震动传感器固定台在预定方向上与机器人车体间的相对位移,机器人根据测量的相对位移来计算并去除传感器固定台震动导致的定位误差,以消除机器人行走时的底盘震动对机器人定位传感器的定位精度产生不利影响,定位精度高,稳定性好。
本发明的进一步设置为:所述测量装置为位移传感器。
通过采用上述技术方案,位移传感器可以很好的与机器人进行信号交换,将相对位置信息会转化为电信号传递给机器人,以方便机器人进行分析计算并转化为定位误差值后进行实时矫正,并且测量精度高,可长期自动化监测,从而提升机器人的定位精度,自动化程度高,稳定性好。
本发明的进一步设置为:所述传感器固定台包括用于安装定位传感器的底板和用于与机器人车体连接的安装柱,所述底板与安装柱一体成型或者相互固定连接,所述底板位于机器人车体下方,所述定位传感器位于底板的下表面。
通过采用上述技术方案,定位传感器安装在底板的下表面,安装柱与机器人车体连接,从而实现定位传感器与机器人车体的连接,而控制底板与机器人车体之间的相对高度可以调整定位传感器与地面之间的相对高度,使定位传感器保持良好的定位精度,同时,在机器人行走过程中,传感器固定台还能够抵挡地面障碍物并消除一部分的震动,以降低机器人行走时的震动对定位传感器的影响,进一步提升了定位传感器的精度。
本发明的进一步设置为:所述传感器固定台上还设置有缓冲装置,所述缓冲装置位于传感器固定台的底板和机器人车体之间。
通过采用上述技术方案,缓冲装置连接传感器固定台和机器人车体,能够吸收减缓传感器固定台相对机器人车体的震动,从而减少机器人行走时因定位传感器震动而对定位精度产生的不利影响,使定位传感器的定位精度更高,同时也防止定位传感器因长期震动而造成内部元器件损坏,使定位传感器的使用寿命更长。
本发明的进一步设置为:所述悬挂装置包括悬挂盖板,所述安装柱穿过机器人车体后与悬挂盖板固定连接。
通过采用上述技术方案,悬挂装置用于将传感器固定台和机器人车体连接,同时使得传感器固定台只能沿预定的方向运动,该预定的方向为传感器固定台与机器人车体间的相对位移的方向,便于测量装置进行数据采集。
本发明的进一步设置为:所述传感器固定台上还设置有保护套,所述保护套固定在底板的四周。
通过采用上述技术方案,保护套能够很好的缓冲机器人行走过程中因地面的障碍物对传感器固定台的磕碰而造成测量装置和定位传感器震动,从而影响定位精度或者对测量装置和定位传感器等元器件造成损坏。
本发明的进一步设置为:所述底板的下表面还设置有防撞垫,所述防撞垫上设有用于安装定位传感器的槽,所述定位传感器嵌设于防撞垫的槽中并固定在底板上。
通过采用上述技术方案,防撞垫进一步加强了对定位传感器的保护,有效降低地面的障碍物直接磕碰到定位传感器的风险,同时,定位传感器嵌设于防撞垫的槽中,进一步提高了定位传感器在水平方向上的稳定性。
本发明的有益效果是:
1.本发明定位精度高,稳定性好:通过安装在机器人车体上的定位传感器来感知地面标记物以确定机器人底盘的位置,实现定位,通过悬挂装置将传感器固定台和机器人车体连接,使得传感器固定台只能沿预定的方向运动,通过测量装置实时测量因机器人行走时的震动和机器人车体相对地面高度的升降变化时传感器固定台在预定方向上与机器人车体间的相对位移,机器人根据测量的相对位移来计算并去除传感器固定台震动导致的定位误差,以消除对机器人定位传感器的定位精度产生不利影响,定位精度高,稳定性好。
2.本发明通过将定位传感器安装在传感器固定台的底板下表面,再通过传感器固定台上的安装柱与机器人车体连接,从而实现定位传感器与机器人车体的连接,因此通过控制底板与机器人车体之间的相对高度可以调整定位传感器与地面之间的相对高度,从而使定位传感器保持良好的定位精度,同时,在机器人行走过程中,传感器固定台还能够抵挡地面障碍物并消除一部分的震动,以降低机器人行走时的震动对定位传感器的影响,进一步提升了定位传感器的精度。
3.本发明通过传感器固定台和机器人车体之间设置缓冲装置,来有效吸收减缓传感器固定台相对机器人车体的震动,从而减少机器人行走时因定位传感器震动而对定位精度产生的不利影响,使定位传感器的定位精度更高,同时也防止定位传感器因长期震动而造成内部元器件损坏,使定位传感器的使用寿命更长。
4.本发明通过在传感器固定台底板的四周设置保护套来对传感器固定台进行保护,有效减少机器人行走过程中因地面的障碍物对传感器固定台的磕碰而造成测量装置和定位传感器震动对定位精度的影响或者对测量装置或者定位传感器等元器件造成损坏,同时,传感器固定台底板下表面设置的防撞垫进一步加强了对定位传感器的保护,进一步防止地面的障碍物直接磕碰到定位传感器的风险,另外,由于定位传感器嵌设于防撞垫的槽中,进一步提高了定位传感器在水平方向上的稳定性,进一步减小了机器人在行走过程中定位传感器在水平方向上的震动。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
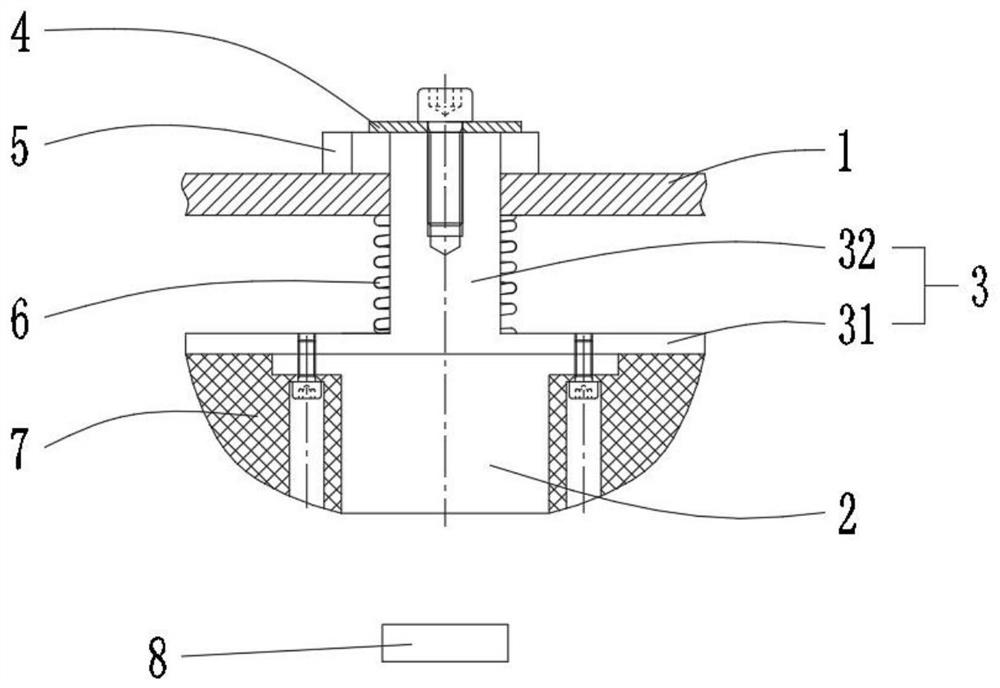
图1是本发明一种新型机器人底盘的剖面结构示意图。
图中,1、机器人车体;2、定位传感器;3、传感器固定台;31、底板;32、安装柱;4、悬挂装置;5、测量装置;6、缓冲装置;7、防撞垫;8、地面标记物。
具体实施方式
下面将结合具体实施例对本发明的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参照图1,一种新型机器人底盘,包括机器人车体1和安装在机器人车体1上的定位传感器2,所述定位传感器2安装在传感器固定台3上,所述传感器固定台3通过悬挂装置4与机器人车体1连接,所述机器人车体1上还设有用于测量传感器固定台3与机器人车体1间相对位移的测量装置5,机器人在行走的过程中,安装在机器人车体1上的定位传感器2通过感知地面标记物8来确定机器人底盘的位置,悬挂装置4将传感器固定台3和机器人车体1连接,使得传感器固定3台只能沿预定的方向运动,同时,测量装置5实时测量因机器人行走时的震动和机器人车体1相对地面高度的升降变化时传感器固定台3在预定方向上与机器人车体1间的相对位移,机器人根据测量的相对位移来计算并去除传感器固定台3震动导致的定位误差,以消除机器人行走时的震动和机器人车体1相对地面高度的升降变化对机器人定位传感器2的定位精度产生不利影响,使机器人定位传感器2的定位精度更高。
进一步的,所述测量装置5为位移传感器,该位移传感器可以但不限于为磁致伸缩位移传感器,该位移传感器具有良好的环境适应性、可靠性和稳定性,同时它还具有高响应、高精度、低迟滞和使用寿命长等诸多优点,具有极高的性价比,可以很好的与机器人进行信号交换,将传感器固定台3与机器人车体1之间的相对位置信息会转化为电信号传递给机器人,以方便机器人进行分析计算并转化为定位误差值后进行实时矫正,并且测量精度高,可长期自动化监测,从而提升机器人的定位精度,自动化程度高,稳定性好。
进一步的,所述传感器固定台3包括用于安装定位传感器2的底板31和用于与机器人车体1连接的安装柱32,所述底板31与安装柱32一体成型或者相互固定连接,所述底板31位于机器人车体1下方,所述定位传感器2位于底板31的下表面,定位传感器2安装在底板31的下表面,安装柱32与机器人车体1连接,从而实现定位传感器2与机器人车体1的连接,相较于直接将定位传感器2固定在机器人车体1底部的方式,利用传感器固定台3来对定位传感器2进行安装的方式可以实现通过控制传感器固定台3的底板31与机器人车体1之间的相对高度来调整定位传感器2与地面之间的相对高度,从而实现使定位传感器2保持良好的定位精度的效果,同时,在机器人行走过程中,传感器固定台3还能够抵挡地面障碍物并消除一部分的震动,以降低机器人行走时的震动对定位传感器2的影响,进一步提升了定位传感器2的精度。
进一步的,所述悬挂装置4包括悬挂盖板,所述安装柱32穿过机器人车体1后与悬挂盖板固定连接,悬挂装置4用于将传感器固定台3和机器人车体1连接,同时使得传感器固定台3只能沿预定的方向运动,该预定的方向为传感器固定台3与机器人车体1间的相对位移的方向,便于测量装置5对传感器固定台3与机器人车体1间的相对位移数据的采集。
进一步的,所述传感器固定台3上还设置有缓冲装置6,所述缓冲装置6位于传感器固定台3的底板31和机器人车体1之间,所述缓冲装置6可以是弹簧或其他可压缩缓冲冲击的材料,所述弹簧的两端分别固定在传感器固定台3和机器人车体1上,缓冲装置6能够吸收减缓传感器固定台3相对机器人车体1的震动,从而减少机器人行走时因测量装置5和定位传感器2震动而对定位精度产生的不利影响,使定位传感器2的定位精度更高,同时也减轻了测量装置5和定位传感器2因长期震动而造成内部元器件损坏的问题,使测量装置5和定位传感器2的使用寿命更长。
进一步的,所述传感器固定台3上还设置有保护套,所述保护套固定在底板31的四周,保护套能够很好的缓冲机器人行走过程中因地面的障碍物对传感器固定台3的磕碰而造成测量装置5和定位传感器2震动,从而影响定位精度或者对测量装置5和定位传感器2等元器件造成损坏。
进一步的,所述底板31的下表面还设置有防撞垫7,所述防撞垫7的材料可以是橡胶,树脂,铜等,所述防撞垫7上设有用于安装定位传感器2的槽,所述定位传感器2嵌设于防撞垫7的槽中并固定在底板31上,防撞垫7进一步加强了对定位传感器2的保护,有效降低地面的障碍物直接磕碰到定位传感器2的风险,同时,定位传感器2嵌设于防撞垫7的槽中,进一步提高了定位传感器2在水平方向上的稳定性,进一步减小了机器人在行走过程中定位传感器2在水平方向上的震动。
- 一种新型机器人底盘
- 一种新型机器人底盘及多元机器人