一种检测机器人移动姿势调节的方法
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及机器人技术领域,具体涉及一种检测机器人移动姿势调节的方法。
背景技术
自动化检测已经广泛应用于人们日常生活的各个领域,然而在大型液体传输管道(如给水管、排水管、输油管等)检测领域自动化程度却比较低,管道潜望镜只能用于单点检测,不能获取管道全线的结果;管道闭路电视监测采用视频监控系统,借助携带摄像镜头的爬行器,通过有线控制对管道内部情况进行录像,以确定管道内部缺陷。管道闭路电视监测为有线控制,操作不便利,同时获取的视频数据缺乏精确位置信息;管道声呐设备成本高,操作较为复杂;人员进入检测方式需要很多人员参与,劳动强度大,效率低下,同时施工人员存在一定的安全风险。不能实现带水作业。
发明内容
本发明要解决的技术问题是:提出检测机器人移动姿势调节的方法,能够保证检测机器人的主载体在中间流道流动,实现带水作业,保证工作的可靠性。
一种检测机器人移动姿势调节的方法,包括:
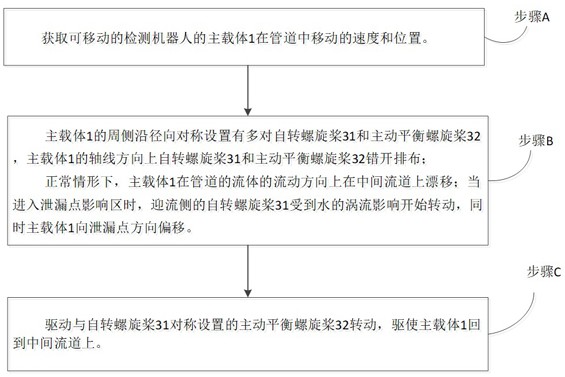
步骤A. 获取可移动的检测机器人的主载体在管道中移动的速度和位置;
步骤B. 主载体的周侧沿径向对称设置有多对自转螺旋桨和主动平衡螺旋桨,主载体的轴线方向上自转螺旋桨和主动平衡螺旋桨错开排布;
正常情形下,主载体在管道的流体的流动方向上在中间流道上漂移;当进入泄漏点影响区时,迎流侧的自转螺旋桨受到水的涡流影响开始转动,同时主载体向泄漏点方向偏移;
步骤C. 驱动与自转螺旋桨对称设置的主动平衡螺旋桨转动,驱使主载体回到中间流道上。
优选的,步骤B还包括:
根据主载体所在位置的管道弯折和走向情况动态分别驱动一个或多个主动平衡螺旋桨转动,平衡管道弯折和走向变化对主载体的偏离中间流道的影响,以驱使主载体保持在中间流道上。
优选的,主载体的同一位置的周侧设置有三对自转螺旋桨和主动平衡螺旋桨,自转螺旋桨和主动平衡螺旋桨间隔排布。
优选的,主载体的周侧至少设置有六对自转螺旋桨,主载体的周侧轴线方向的相邻位置的自转螺旋桨和主动平衡螺旋桨间隔设置。
主载体的轴线方向的相邻位置的自转螺旋桨和主动平衡螺旋桨错开45°排布。
优选的,步骤C之后,还包括:
步骤D. 自转螺旋桨的一侧设置有编码器,编码器用于获取主载体的迎流侧的自转螺旋桨的旋转角速度、加速度和旋转圈数,并以无线形式发送至远程控制终端;
步骤E. 远程控制终端结合获取的主载体在管道中移动的速度和位置、自转螺旋桨的旋转角速度、加速度和旋转圈数,计算流向疑似泄露点的流速和流量,计算疑似泄露点的泄流量和泄流速度,从而判断计算管道内疑似泄漏点的位置和大小。
优选的,步骤D之后,步骤E之前还包括:
步骤D1:提取主载体偏离中间流道的数据,当主载体持续的偏离中间流道移动超过设定的时长和设定的距离时,判断为进入疑似泄漏点影响区;
设定的时长为2S以上;设定的距离为管道半径的15%以上;
主载体进入疑似泄露点影响区后,则启动步骤E;否则,不启动步骤E。
优选的,当液体输送管道的某处发生缝隙泄露后,管道内的液体在向前流动的同时会向缝隙处流动,主载体发生径向偏移,迎流的方向(指流向泄露缝隙或泄漏点的流体方向)处的自转螺旋桨首先转动,判断转动的起始区域为疑似泄露点影响区的起始范围。疑似泄漏点影响区包括:主载体从远到近逐渐接近泄漏点,受到疑似泄流点的流场影响的范围内;或,主载体从远到近接近疑似泄露点然后又由近到远逐渐离开疑似泄漏点,受到疑似泄流点的流场影响的范围内。
步骤E还包括:通过红外测距仪测量主载体偏移管道的流体中间的距离;红外测距仪有多个,红外测距仪分布于主载体的周侧。结合红外测距仪测得的主载体距离管道周侧的距离和主载体偏离中间流道的情况,分离出管道折弯、转向对主载体移动的影响;驱动主动平衡螺旋桨工作,调节主载体的走向,去除管道折弯、转向对主载体偏离流道中间的影响。
本实施例中,主载体的后部依次设置有2个以上的后推进螺旋桨;
后推进螺旋桨采用嵌套轴,每个后推进螺旋桨对应嵌套轴中的一个;
自转螺旋桨的个体数量在4个以上,
每个自转螺旋桨的内侧同轴连接一个锥齿轮,每个锥齿轮与一个主载体内的锥形齿环啮合;
每个锥形齿环套接在嵌套轴中的一个上。
在泄漏点前后,主载体受到水流方向影响会偏离中心而运动,此时迎流侧的自转螺旋桨开始转动,通过锥齿轮和锥形齿环以及后推进螺旋桨,将侧向推力转化为向前移动的助力,变害为利。
优选的,步骤B之后,步骤C之前还包括:
步骤X. 判断主载体是否进入泄漏点影响区,如果进入泄漏点影响区,则延时进入步骤C,让主载体在涡流的影响下偏离管道中心移动,当主载体与疑似泄露点的距离达到设定的值时,启动主动平衡螺旋桨,控制主动平衡螺旋桨的转速和转动时间,从而控制主载体偏离流道中间的距离,启用摄像头对疑似泄露点进行拍照;拍照结束后进入步骤C。在发现疑似泄漏点后才开始拍摄进行图形采集,节约了电能,减小了图像传输的工作量,降低了图像分析的工作量,克服了现有技术的不足,精准、快速、可以长距离的找到管道泄漏点。
优选的,摄像头的数量在3个以上,摄像头均布于主载体的周侧,摄像头位于主动平衡螺旋桨的下部;各个主动平衡螺旋桨同步转动,可以清洗摄像头的表面。
优选的,主载体内设置有配重块和充放气调节机构,控制主载体的吃水深度,以控制主载体在常规情形下位于管道的竖直方向的接近中间的位置;
正常情形指:管道不折弯、无支流、不变向和不泄露。
优选的,主载体的前端设置有主推进螺旋桨,主推进螺旋桨依靠水流的推动力推动主载体沿管道输送方向前进。主推进螺旋桨主要借助于水流的推力实现整体系统的移动,能够节省电能,解决了动力和长距离移动的问题。
主推进螺旋桨上设置有微型流量计;通过微型流量计计算主载体与管道内液体的流速差。
优选的,主载体整体为圆筒型,主载体的前侧和后侧分别设置上述主推进螺旋桨和后推进螺旋桨,主推进螺旋桨伸出主载体的外侧,后推进螺旋桨位于主载体的后侧的缩进孔内。
优选的,主推进螺旋桨的桨叶在3个以上,桨叶上设置有可开合的漏水孔;主载体的前端设置有泄压孔,泄压孔的进水端位于主载体的前端,泄压孔的出水端位于主载体的前端的侧部。
优选的,主主控模块通过电机分别驱动每个主动平衡螺旋桨转动,以校正主载体位于管道的中间流道上;或,控制各个主动平衡螺旋桨的转速、主载体的配重和排气量可以将主载体设置在任意一个需要的悬停位置,为图像采集提供良好的视角。
优选的,主载体的外侧壁设置阵列台阶孔,自转螺旋桨内嵌于台阶孔的外孔部分,自转螺旋桨的安装轴穿过台阶孔的内孔部分伸入主载体内。
优选的,主推进螺旋桨、后推进螺旋桨、自转螺旋桨、主动平衡螺旋桨和泄压孔的外侧设置有防护罩。
优选的,本发明提供的方法可以用于管道(管道直径1米以上)在线检测系统,采用无线形式进行数据传输和图像拍摄,克服现有技术的不足,精准、快速的找到管道泄漏点。大型输水工程、排污工程、雨水输送等管道系统随着使用年限的增加,在工作环境和输送原料的长期作用下,不可避免地会出现老化、裂痕、腐蚀等破坏,从而引起液体渗漏、管道爆裂等潜在事故,能否及时发现管道的渗漏点对于管道的修复和人民生产生活意义重大。
每个锥齿轮与自转螺旋桨的连接轴上设置有用于计量自转螺旋桨的角速度和旋转圈数的编码器,主载体内设置有主控模块,主控模块以无线形式将自转螺旋桨的角速度和旋转圈数发送至远程控制终端,远程控制终端根据自转螺旋桨的角速度、加速度和旋转圈数就可以确定疑似泄漏点的大小和位置。
主载体底部重上部轻,主载体可以以相对稳定的姿态在管道内沿液体流动方向移动,主载体内设置有主控模块,在移动过程中能够保持直立状态,便于各个自转螺旋桨的定位和工作,远程控制终端根据各个自转螺旋桨的旋转角速度、加速度和旋转圈数判断主载体周侧的流体环境,从而获得了一种改进型的检测机器人移动姿势调节的方法。
本发明的有益效果是:一种检测机器人移动姿势调节的方法,包括:步骤A. 获取可移动的检测机器人的主载体在管道中移动的速度和位置;步骤B. 主载体的周侧沿径向对称设置有多对自转螺旋桨和主动平衡螺旋桨,主载体的轴线方向上自转螺旋桨和主动平衡螺旋桨错开排布;正常情形下,主载体在管道的流体的流动方向上在中间流道上漂移;当进入泄漏点影响区时,迎流侧的自转螺旋桨受到水的涡流影响开始转动,同时主载体向泄漏点方向偏移;步骤C. 驱动与自转螺旋桨对称设置的主动平衡螺旋桨转动,驱使主载体回到中间流道上。设置自转螺旋桨,能够及时感知泄漏点附近的涡流,并通过锥齿轮和锥形齿环,将涡流转化为主载体移动的驱动力,避免主载体受到大的冲击,变害为利;同时借助主动平衡螺旋桨,能够保证检测机器人的主载体在中间流道流动,实现带水作业,保证检测过程的可靠性。
附图说明
下面结合附图对本发明的检测机器人移动姿势调节的方法作进一步说明。
图1是本发明检测机器人移动姿势调节的方法的实施例一的流程图。
图2是本发明检测机器人移动姿势调节的方法的实施例二的流程图。
图3是本发明检测机器人移动姿势调节的方法的硬件部分的一个实施例的剖面结构示意图。
图4是本发明检测机器人移动姿势调节的方法的图4的A处的局部放大图。
图5是本发明检测机器人移动姿势调节的方法的硬件的自转螺旋桨和主动平衡螺旋桨的布置图。
图6是本发明检测机器人移动姿势调节的方法的主推进螺旋桨的结构示意图。
图中:
1-主载体;11-缩进孔;21-主推进螺旋桨;211-桨叶;2111-漏水孔;22-后推进螺旋桨;31-自转螺旋桨;32-主动平衡螺旋桨;4-锥齿轮;5-锥形齿环;6-编码器;01-摄像头;02-主控模块;03-远程控制终端;04-泄压孔。
具体实施方式
下面结合附图1~6并通过具体实施方式来进一步说明本发明的技术方案。
实施例一
一种检测机器人移动姿势调节的方法,包括:
步骤A. 获取可移动的检测机器人的主载体1在管道中移动的速度和位置;
步骤B. 主载体1的周侧沿径向对称设置有多对自转螺旋桨31和主动平衡螺旋桨32,主载体1的轴线方向上自转螺旋桨31和主动平衡螺旋桨32错开排布;
正常情形下,主载体1在管道的流体的流动方向上在中间流道上漂移;当进入泄漏点影响区时,迎流侧的自转螺旋桨31受到水的涡流影响开始转动,同时主载体1向泄漏点方向偏移;
步骤C. 驱动与自转螺旋桨31对称设置的主动平衡螺旋桨32转动,驱使主载体1回到中间流道上。
通过设置主动平衡螺旋桨32可以主动调节主载体1在液体输送管道中的位置,保证主载体1位于流道中间,为拍照、红外探测等提供良好的工作条件;通过设置自转螺旋桨31,可以获得自转螺旋桨31的转速、角速度和角加速度等,从而可以计算出泄漏点处涡流的大小和方向等,结合主载体1在管道中移动的速度和位置,从而可以判断泄漏点的位置和大小。
本实施例中,步骤B还包括:
根据主载体1所在位置的管道弯折和走向情况动态分别驱动一个或多个主动平衡螺旋桨32转动,平衡管道弯折和走向变化对主载体1的偏离中间流道的影响,以驱使主载体1保持在中间流道上。通过设置主动自平衡螺旋桨32,可以根据需要调节和控制主载体1在液体管道中的位置。
本实施例中,主载体1的同一位置的周侧设置有三对自转螺旋桨31和主动平衡螺旋桨32,自转螺旋桨31和主动平衡螺旋桨32间隔排布。也就是说主载体1的同一位置的周侧设置有六个螺旋桨。主载体1的周侧轴线方向的相邻位置的自转螺旋桨31和主动平衡螺旋桨32间隔设置;也就是说主载体1的周侧至少设置有12个螺旋桨,6个自转螺旋桨31和6个主动平衡螺旋桨32。保证主载体1的周侧的自转螺旋桨31能够及时感应到泄漏点的涡流影响,及时通过主动平衡螺旋桨32控制主载体1在流道中的位置。主载体1偏离中间流道后,驱动与自转螺旋桨31对称设置的主动平衡螺旋桨32转动,驱使主载体1回到中间流道上,能够保证检测机器人的主载体1在中间流道流动,实现带水作业,保证检测过程的可靠性。
实施例二
一种检测机器人移动姿势调节的方法,包括:
步骤A. 获取可移动的检测机器人的主载体1在管道中移动的速度和位置;
步骤B. 主载体1的周侧沿径向对称设置有多对自转螺旋桨31和主动平衡螺旋桨32,主载体1的轴线方向上自转螺旋桨31和主动平衡螺旋桨32错开排布;
正常情形下,主载体1在管道的流体的流动方向上在中间流道上漂移;当进入泄漏点影响区时,迎流侧的自转螺旋桨31受到水的涡流影响开始转动,同时主载体1向泄漏点方向偏移;
步骤C. 驱动与自转螺旋桨31对称设置的主动平衡螺旋桨32转动,驱使主载体1回到中间流道上;
步骤D.获取主载体1的迎流侧的自转螺旋桨31的旋转角速度、加速度和旋转圈数,并以无线形式发送至远程控制终端03;
步骤E. 自转螺旋桨31的一侧设置有编码器,编码器用于获取自转螺旋桨31的旋转角速度、加速度和旋转圈数;远程控制终端03结合获取的主载体1在管道中移动的速度和位置、自转螺旋桨31的旋转角速度、加速度和旋转圈数,计算管道内疑似泄漏点的位置和泄漏点的大小。
锥齿轮本实施例中,步骤D之后,步骤E之前还包括:
步骤D1:提取主载体1偏离中间流道的数据,当主载体1持续的偏离中间流道移动超过设定的时长和设定的距离时,判断为进入疑似泄漏点影响区;
设定的时长为2S以上;设定的距离为管道半径的15%以上;
主载体1进入疑似泄露点影响区后,则启动步骤E;否则,不启动步骤E。
本实施例中,疑似泄漏点影响区包括:
主载体1从远到近逐渐接近泄漏点,受到疑似泄流点的流场影响的范围内;或,
主载体1从远到近接近疑似泄露点然后又由近到远逐渐离开疑似泄漏点,受到疑似泄流点的流场影响的范围内。
步骤E还包括:
通过红外测距仪测量主载体1偏移管道的流体中间的距离;
红外测距仪有多个,红外测距仪分布于主载体1的周侧。
本实施例中,主载体1的后部依次设置有2个以上的后推进螺旋桨22;
后推进螺旋桨22采用嵌套轴,每个后推进螺旋桨22对应嵌套轴中的一个;
自转螺旋桨31的个体数量在6个以上,
每个自转螺旋桨31的内侧同轴连接一个锥齿轮4,每个锥齿轮4与一个主载体1内的锥形齿环5啮合;
每个锥形齿环5套接在嵌套轴中的一个上。
正常情形下,主载体1在管道的流体的流动方向上在中间流道上漂移;当进入泄漏点影响区时,迎流侧的自转螺旋桨31受到水的涡流影响开始转动,同时主载体1向泄漏点方向偏移;能够及时感知泄漏点附近的涡流,并通过锥齿轮4和锥形齿环5,将涡流转化为主载体移动的驱动力,避免主载体受到大的冲击,变害为利。
实施例三
本实施例的步骤A、步骤B和步骤C参照实施例一。
本实施例中,步骤B之后,步骤C之前还包括:
步骤X. 判断主载体1是否进入泄漏点影响区,如果进入泄漏点影响区,则延时进入步骤C,让主载体1在涡流的影响下偏离管道中心移动,当主载体1与疑似泄露点的距离达到设定的值时,启动主动平衡螺旋桨32,控制主动平衡螺旋桨32的转速和转动时间,从而控制主载体1偏离流道中间的距离,启用摄像头01对疑似泄露点进行拍照;拍照结束后进入步骤C。
本步骤的意义在于选取最佳拍照和摄像距离,从而为后续图像分析提供好的素材和数据。
本实施例中,主载体1内设置有配重块和充放气调节机构,控制主载体1的吃水深度,以控制主载体1在常规情形下位于管道的竖直方向的接近中间的位置。
通过主载体1的配重和排气量可以控制主载体1在管道的中间流道上移动,中间流道是指管道的水平直径和竖直直径的交叉线所在的流体方向,本实施例中,中间流道的要求不需要太严格,主载体1在中间流道上下左右漂移或偏移不超过管道的直径的10%,都可以认为在中间流道上;主载体1的前侧(水流动的上游定义为前侧)设置主推动螺旋桨21,主推动螺旋桨21在水流的作用下产生推动力,推动主载体1沿水流方向移动,能够节省电能,提高系统的整体续航能力;主载体1沿管道正常移动过程中基本位于中间流道内,当管道某处出现泄漏点后,该点前后的流场发生变化,会产生指向该点的液体流动,当主载体1进入该流场后,主载体1周侧自转螺旋桨31会受到流场的推动作用开始转动,自转螺旋桨31的旋转角速度、加速度和旋转圈数可以通过与其同轴设置的编码器进行统计,记录自转螺旋桨31在同一流场的不同位置的转动情况,便可以获得流场的分布,进而能够确定疑似泄露点的位置。
正常情形指:管道不折弯、无支流、不变向和不泄露。
本实施例中,主载体1的前端设置有主推进螺旋桨21,主推进螺旋桨21依靠水流的推动力推动主载体1沿管道输送方向前进。
主推进螺旋桨21上设置有微型流量计;通过微型流量计计算主载体1与管道内液体的流速差。
如何判断主载体1是否进入泄漏点影响区,提取主载体1偏离中间流道的数据,当主载体1持续的偏离中间流道移动超过设定的时长和设定的距离时,判断为进入疑似泄漏点影响区;
设定的时长为2S以上;设定的距离为管道半径的15%以上;主载体1进入疑似泄露点影响区后,则启动步骤C;否则,不启动步骤C;
步骤C. 远程控制终端03结合获取的主载体1在管道中移动的速度和位置、自转螺旋桨31的旋转角速度、加速度和旋转圈数,计算管道内疑似泄漏点的位置。
本实施例中,主载体1的周侧由前到后分布有2组以上的自转螺旋桨31,主载体1的后部依次设置有2个以上的后推进螺旋桨22;
后推进螺旋桨22采用嵌套轴,每个后推进螺旋桨22对应嵌套轴中的一个;
每组自转螺旋桨31的个体数量在4个以上,每组内的自转螺旋桨31均匀设置于主载体1的周侧;
每个自转螺旋桨31的内侧同轴连接一个锥齿轮4,同一组的锥齿轮4与一个主载体1内的锥形齿环5啮合;
每个锥形齿环5套接在嵌套轴中的一个上。
本实施例中,步骤B1还包括:
步骤B11. 结合红外测距仪测得的主载体1距离管道周侧的距离和主载体1偏离中间流道的情况,分离出管道折弯、转向对主载体1移动的影响;
驱动主动平衡螺旋桨32工作,调节主载体1的走向,去除管道折弯、转向对主载体1偏离流道中间的影响。
本实施例中,步骤B11还包括:
通过红外测距仪测量主载体1偏移管道的流体中间的距离;红外测距仪有多个,红外测距仪分布于主载体1的周侧。
红外测距仪在主载体1进入疑似泄露点影响区后才启动,降低电能消耗量;通过红外测仪,可以精确地测量主载体1偏离管道中心的位置,同时红外测距仪辅助摄像头01可以作为重要的辅助参数,用来精确地计算疑似泄露点深度,疑似泄露点的离心距离会偏大,借助于正常的偏心距离,根据偏大的具体数值,可以精确的算出疑似泄露点的深度。
本发明中,还提供了基于检测机器人移动姿势调节的方法的具体装置,包括可移动的主载体1和承载于其上用于拍摄图像的摄像头01,主载体1整体为圆筒型,主载体1的前侧和后侧分别设置有主推进螺旋桨21和后推进螺旋桨22,主推进螺旋桨21伸出主载体1的外侧,后推进螺旋桨22位于主载体1的后侧的缩进孔11内;
主载体1底部重上部轻,每个锥齿轮4与自转螺旋桨31的连接轴上设置有用于计量自转螺旋桨31的角速度和旋转圈数的编码器6,主载体1内设置有主控模块02,主控模块02以无线形式将自转螺旋桨31的角速度和旋转圈数发送至远程控制终端03;
远程控制终端03根据各个自转螺旋桨31的旋转角速度、加速度和旋转圈数判断主载体1周侧的流体环境;
N为自然数。
主载体1整体为圆筒型,可以减少液体的阻力,主载体1漂浮在管道内,实现管道工作环境下的测量工作,主推进螺旋桨21伸出主载体1的外侧,可以更好地接收液体流动方向上的推力,实现更好地助力作用;后推进螺旋桨22位于主载体1的后侧的缩进孔11内,避免后推荐螺旋桨22在不工作的状态下产生移动阻力;主推进螺旋桨21主要借助于水流的推力实现整体系统及主载体1的移动,能够节省电能,解决了动力和长距离移动的问题;在泄漏点前后,主载体1受到水流方向影响会偏离中心而运动,此时迎流侧的自转螺旋桨31开始转动,通过锥齿轮4和锥形齿环5以及后推进螺旋桨22,将泄漏点处的侧向推力转化为向前移动的助力,每个锥齿轮4与自转螺旋桨31的连接轴上设置有用于计量自转螺旋桨31的角速度、角加速度和旋转圈数的编码器6,主载体1内设置有主控模块02,主控模块02以无线形式将自转螺旋桨31的角速度、角加速度和旋转圈数发送至远程控制终端03,远程控制终端03根据自转螺旋桨31的角速度、角加速度和旋转圈数就可以确定疑似泄漏点的大小和位置;在主载体1偏离中心流道设定的距离后启动摄像头01开始摄像,从而可以针对的进行拍摄动作,避免无序和无效拍摄;主载体1底部重上部轻,在移动过程中保持直立状态,便于各个自转螺旋桨31的定位和工作,远程控制终端03根据各个自转螺旋桨31的旋转角速度、加速度和旋转圈数判断主载体周侧的流体环境,从而获得了一种改进型的检测机器人移动姿势调节的方法,采用无线形式和定点拍摄技术,克服现有技术的不足,精准、快速、长距离巡航的找到管道泄漏点。
本实施例中,主载体1还设置有定位模块,通过定位模块可以实时跟踪主载体1的大体位置,位置偏差在3米以内,小于输水管道的单根管的长度,能够实现管道级别的定位,再借助于自转螺旋桨31的数据,可以实现泄漏点的精准定位。
本实施例中,N为1,根据需要N也可以是2、3、4、5……。
主动平衡螺旋桨32还用于精准悬停主载体1,控制各个主动平衡螺旋桨32的转速,可以使得主载体1适应设定位置处的流场环境,从而精准的悬停在需要的位置,通过摄像头01进行精准的拍摄,拍摄泄漏点的清晰图像。
本实施例中,主载体1的周侧还均匀设置有多个红外测距仪,红外测距仪用于测量主载体1偏移管道的流体中间的距离;红外测距仪可以用于辅助测量主载体1偏离流道中心的位置,从而判断主载体1收到的作用力;红外测距仪还用于测量主载体1在径向方向发生的漂移。
主控模块02根据测量得到的偏移距离控制主动平衡螺旋桨32的转速和转动时间,以使主载体1回到管道的流体中间位置。
本实施例中,主载体1的外侧壁设置阵列台阶孔,自转螺旋桨31内嵌于台阶孔的外孔部分,自转螺旋桨31的安装轴穿过台阶孔的内孔部分伸入主载体1内。
本实施例中,主载体1发生径向偏移时,主控模块02控制摄像头01对疑似泄露点进行拍照。
本实施例中,主推进螺旋桨21的桨叶211在3个以上,桨叶211上设置有可开合的漏水孔2111;漏水孔2111处设置旋转挡片,旋转挡片与主推进螺旋桨21同轴设置,旋转挡片的驱动轴为空心轴,空心轴设置在主推进螺旋桨21的转轴(安装轴)的外侧。通过控制旋转挡片的旋开角度可以控制漏水孔2111的漏水量,从而控制主推荐螺旋桨21受到的推力,从而控制主载体1的移动速度。
主载体1的前端设置有泄压孔04,泄压孔04的进水端位于主载体1的前端,泄压孔04的出水端位于主载体1的前端的侧部。
本实施例中,主载体1回到管道的流体中间位置,主控模块02控制主载体1悬停1秒钟以上,主控模块02以无线形式向外发出精准的定位信息。
本实施例中,摄像头01的数量在3个以上,摄像头01均布于主载体1的周侧,摄像头01位于主动平衡螺旋桨32的下部的周侧;各个主动平衡螺旋桨32同步转动,主动平衡螺旋桨32转动时,周侧的水流运动,从而可以清洗摄像头01的表面,同时,主动平衡螺旋桨32不会挡住摄像头01。
本实施例中,摄像头01的数量在3个以上,摄像头01均布于主载体1的周侧,摄像头01还位于自转螺旋桨31的下部的周侧;各个自转螺旋桨31转动时,周侧的水流运动、旋流,从而可以清洗摄像头01的表面,同时,自转螺旋桨32不会挡住摄像头01。
本实施例中,主推进螺旋桨21、后推进螺旋桨22、自转螺旋桨31、主动平衡螺旋桨32和泄压孔04的外侧设置有防护罩。
本发明的不局限于上述实施例,本发明的上述各个实施例的技术方案彼此可以交叉组合形成新的技术方案,另外凡采用等同替换形成的技术方案,均落在本发明要求的保护范围内。
- 一种检测机器人移动姿势调节的方法
- 一种基于头部姿势识别的智能移动服务机器人控制方法