一种手爪库
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及机器人手爪配套设备,具体涉及一种手爪库。
背景技术
在柔性加工单元中,因加工工件品种多样,工件在直径、长度、外轮廓形状、重量中存在较大差异,最大差异可达40mm以上,而在国内外品牌中的气动手爪,兼容范围仅有5mm~20mm。近年来,引进了手爪快换模块的技术,随着此技术的应用,很大程度的解决了兼容问题,但随着带来的问题是:多个手爪的存放问题和便易的更换问题,而且需要保持在存放过程中,不能有任何污染,以避免漏气、电信号失效等故障。
现有柔性加工单元中,手爪的存放过于凌乱,定位方式复杂、不稳定,机器人在更换手爪时,常常出现故障报警。另一方面,凌乱的放置也造成了手爪没有有效的防护,一般的机加工现场空气、振动、切削液、铁屑等污染物较多,不可预知的污染因素大量存在,这些都有可能造成机器人在更换手爪过程中,发生漏气,电信号失效等问题,直接影响了柔性加工的持续性和效率。
发明内容
本发明所要解决的技术问题是克服现有技术的不足,目的在于提供一种手爪库,解决现有手爪更换、防护的问题。
本发明通过下述技术方案实现:一种手爪库,包括固定架,固定架上设有手爪工位,固定架上铰接有能够靠近或远离手爪工位上方的防护件,固定架上设有控制防护件活动的驱动组件,防护件为手爪工位提供灵活、可靠的防护结构。
进一步的,所述的防护件为防护板,对手爪工位的上方进行遮盖。
进一步的,所述的防护件与旋转轴连接,旋转轴铰接在固定架上,旋转轴与驱动组件连接,实现防护件的旋转设置,通过旋转靠近或远离手爪工位。
进一步的,所述的防护件与连接块连接,连接块与旋转轴连接。
进一步的,所述的旋转轴设在轴承上,轴承设在轴承座上,轴承座设在固定架上。
进一步的,所述的驱动组件包括伸缩件,伸缩件的一端铰接在固定架上,伸缩件的另一端铰接在旋转轴的偏心座上,伸缩件的伸缩力作用在旋转轴的偏心位置,使得旋转轴偏心受力发生旋转。
进一步的,所述的伸缩件为气缸,气缸的缸筒铰接在固定架上,气缸的活塞杆铰接在旋转轴的偏心座上。
进一步的,所述的固定架为安装杆,为安装其他部件的基础结构。
进一步的,所述的固定架与连接板连接,连接板上设有连接孔,实现将固定架安装在其他结构上。
进一步的,还包括按钮盒,按钮盒和驱动组件均与控制单元电连接,通过按钮盒控制防护件的运动。
进一步的,所述的手爪工位内设有检测手爪的传感器,传感器和驱动组件均与控制单元电连接,通过传感器检测手爪的有无,从而调整防护件的位置。
进一步的,所述的手爪工位设有至少两个,实现一放一换。
进一步的,所述的手爪工位包括底板,底板设在固定架上,底板的两侧设有侧杆,两侧的侧板上设有相对的放置槽,通过两侧的放置槽卡设手爪。
进一步的,所述的放置槽上设有朝向侧部和上部的槽口,方便手爪的进出。
进一步的,所述的传感器包括对射传感器和接近开关,对射传感器位于放置槽的下方,接近开关位于放置槽的内侧,两种传感器对手爪进行检测。
本发明与现有技术相比,具有如下的优点和有益效果:
1、可有效的保护手爪在手爪库中的清洁程度,实现无污染,实现有效防护的功能;
2、利用手爪工位实现手爪的稳定存放,可由关节机器人在手爪库快速更换手爪;
3、手爪工位结构灵活,可根据实际情况扩展手爪工位数量。
附图说明
此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部分,并不构成对本发明实施例的限定。在附图中:
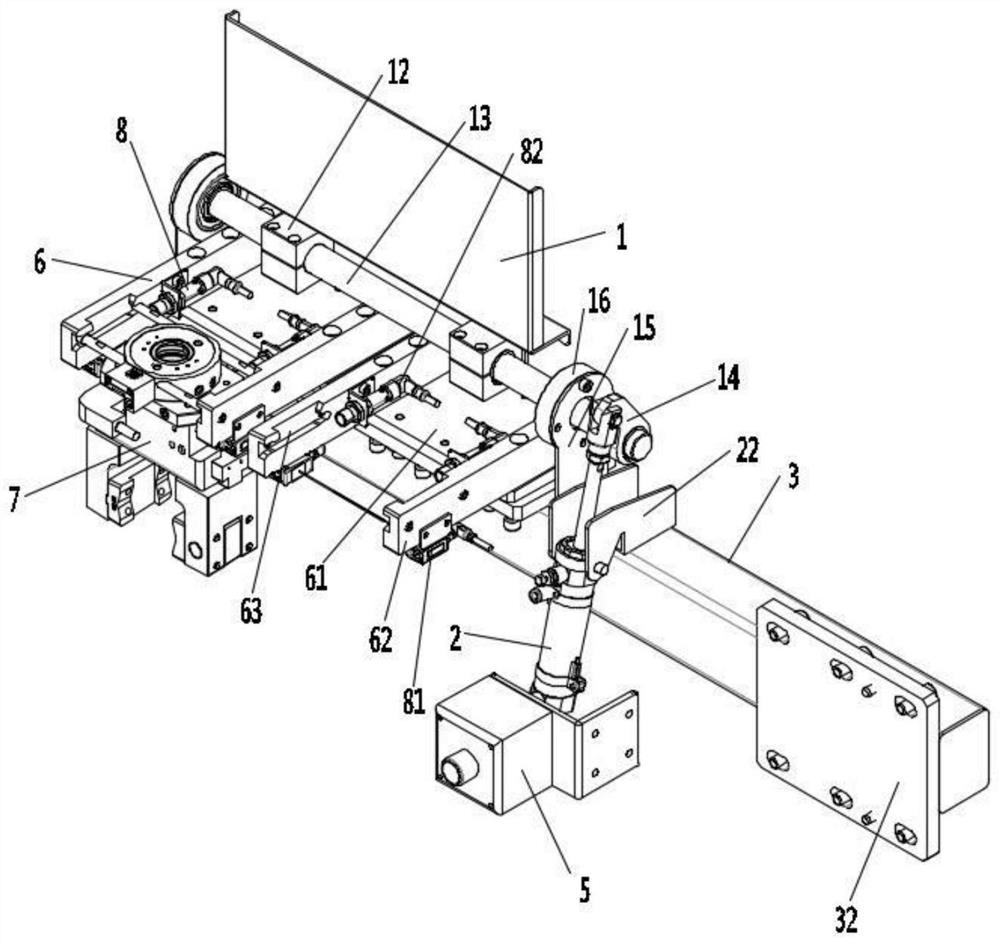
图1为本发明结构立体图。
图2为本发明结构主视图。
图中:1-防护件,2-伸缩件,3-固定架,5-按钮盒,6-手爪工位,7-手爪,8-传感器;12-连接块,13-旋转轴,14-偏心座,15-轴承座,16-轴承;22-气缸座;32-连接板;61-底板,62-侧杆,63-放置槽;81-对射传感器,82-接近开关。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
实施例
如图1和2所示,一种手爪库,包括固定架3,固定架3优选为安装杆,用于安装防护件1、驱动组件、手爪工位等其他结构。固定架3上设有手爪工位6,手爪工位用于放置手爪,手爪工位6设有至少两个,以方便对不同型号的手爪进行放置、更换。
固定架3上铰接有能够靠近或远离手爪工位6上方的防护件1,防护件1优选为防护板。在更换手爪时,防护件远离手爪工位,将手爪工位敞开,在不需要更换手爪时,防护件靠近手爪工位,在手爪工位的上方形成防护结构,避免手爪受到影响。
防护件1与连接块12连接,连接块12与旋转轴13连接,旋转轴13铰接在固定架3上,实现防护件1在固定架上的旋转运动。具体的,旋转轴13设在轴承16上,轴承16设在轴承座15上,轴承座15设在固定架3上,实现旋转轴通过轴承的旋转布置。
旋转轴13与驱动组件连接,通过驱动组件控制旋转轴的旋转运动,从而带动防护件1旋转运动。驱动组件包括伸缩件2,伸缩件2的一端铰接在固定架3上,伸缩件的另一端铰接在旋转轴13的偏心座14上,通过伸缩件的伸缩运动,实现旋转轴的旋转。具体的,伸缩件为气缸,气缸的缸筒铰接在固定架3的气缸座22上,气缸的活塞杆铰接在旋转轴13的偏心座14上。
固定架3与连接板32连接,连接板32上设有连接孔,通过连接板将固定架安装在机械手的立柱上。机械手的立柱上还设有按钮盒5,按钮盒5和驱动组件均与控制单元电连接,通过按动按钮盒,实现将防护件打开或者关闭。
手爪工位6包括底板61,底板61设在固定架3上,底板61的两侧设有侧杆62,两侧的侧板62上设有相对的放置槽63。放置槽63上设有朝向侧部和上部的槽口,放置槽用于卡设手爪,两个槽口能够方便手爪的两个卡柱分别进入,提高更换效率。
手爪工位6内设有检测手爪的传感器,传感器也与控制单元电连接,通过传感器检测手爪是否离开工位,判断手爪更换是否完成,从而控制防护件关闭或保持打开。传感器包括对射传感器81和接近开关82,对射传感器81位于放置槽63的下方,接近开关82位于放置槽63的内侧,两种传感器用于判断手爪是否在手爪工位内。
防护件由防护钣金和防油防水材料组成。当处于存放状态时,防护件由气缸压下,将库内的手爪进行有效防护;当机器人需要更换手爪时,发信号给控制单元,控制单元控制气缸运动,将防护件打开,机器人开始更换手爪。通过此新型的手爪库设计,可简单、简洁的对手爪实现快速定位,通过手爪工位中的V型结构对中定位,手爪放置的一致性非常好,重复定位精度可达0.2mm,完全满足使用要求。
本发明整合了手爪存放方式,采用集中存放,简易有效的的定位方式,给柔性加工系统提供了稳定的支撑;增加手爪防护结构,通过气缸的动力源,转换为防护结构的旋转动作,满足防护和机器人方便抓取的双重功效;整体简洁、小巧的结构,可安装于柔性加工单元的立柱、机床防护、外围防护等多个位置,灵活性更高。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种手爪库
- 一种适用于AGV车的手爪库装置