一种协作机器人控制柜及其控制系统
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及协作机器人的控制柜及其控制系统技术领域。
背景技术
控制柜是按电气接线要求将开关设备、工控机、保护电器和辅助设备组装在封闭中,其布置应满足电力系统正常运行的要求,便于检修,不危及人身及周围设备的安全。在使用中,正常运行时可借助手动或自动开关接通或分断电路,故障或不正常运行时借助保护电器切断电路或报警。
根据相关产品的控制使用需要,对控制柜的布局结构设置也在不断进行改进,如缩小控制柜(尤其是协作机器人控制柜)的外框尺寸,同时提高控制柜的功能和性能等参数,但是这样的改进也存在着问题,就是将会给控制柜的散热、拆装及检修带来挑战,现有的其他控制柜的布局结构设置结构较为复杂,只能有相应的工程师才能对控制柜进行维修,以及尺寸较大,散热存在一定的影响等,这种类型的控制柜也不适于协作机器人的控制柜应用。
发明内容
本发明的目的在于提供一种布局结构设置简洁,有利于便捷使用、维护的一种协作机器人控制柜。
本发明的另一目的在于提供上述一种协作机器人控制柜的控制系统。
为实现上述目的,本发明的技术方案是:一种协作机器人控制柜,包括依空间方位设置的前面柜板、后面柜板、左面柜板、右面柜板、上面柜板和底面柜板围合构成方形体状的柜体,其柜体内为安装腔供控制系统的控制元件安装设置,所述前面板设有示教器支架,所述左面柜板上设有控制总开关、电源指示灯、外部供电电源接口、电机通讯接口、故障指示灯、示教器接口和第一散热风扇,所述右面柜板上设有第二散热风扇、以太网接口和USB接口。
所述第一散热风扇和第二散热风扇分别对应前面柜板和后面柜板之间居中设置,并且第一散热风扇与第二散热风扇上下方向错位开设置。
所述前面柜板为可活动打开或关闭的活动柜板并设置有供关闭锁定的锁具。
所述上面柜板上对应左面柜板和右面柜板的对称两侧靠边沿分别固定设有手提把手,和/或,所述下面柜板上均布设有地脚。
所述电机通讯接口和/或外部供电电源接口采用航插接头。
所述柜体接地连接,所述柜体内的控制元件与柜体连接。
上述一种协作机器人控制柜的控制系统,包括安装设置在安装腔内的控制模块和驱动电源、挂设在示教器支架上的示教器以及柜体外的协作机器人的电机驱动器和电机,所述协作机器人为多自由度的多轴机器人,所述电机驱动器和电机分别对应多轴机器人的各轴设置,所述驱动电源用于通过电机通讯接口向电机驱动器和电机提供电源,所述控制模块包括UPS电源、控制器和I/O传感器,所述UPS电源用于向控制器和I/O传感器提供电源,所述I/O传感器连接控制器,所述控制器采用CAN接口通过CAN总线与电机通讯接口并分别与各电机驱动器和电机相配合对应控制连接,所述I/O传感器通过控制器上设置I/O接口与示教器上设有的急停按钮和使能按钮连接。
所述控制器还包括有以太网接口与柜体上的以太网接口对应,所述控制器还包括有USB接口与柜体上的USB接口对应,所述控制器还包括有VGA接口和LAN接口。
所述控制器上的以太网接口为3个,VGA接口为1个,USB接口为两个,I/O接口为16个。
所述多轴机器人可为具有1-7轴。
通过采用上述技术方案,本发明的有益效果是:上述结构的协作机器人控制柜及其控制系统,特别适合于多自由度的机器人的控制柜使用,其控制柜结构将示教支架设置在前面板,将控制总开关、电源指示灯、外部供电电源接口、电机通讯接口、故障指示灯、示教器接口和第一散热风扇设置在左面柜板,第二散热风扇、以太网接口和USB接口设置在右面柜板,这些器件在柜体上的布设有利于布线整理有序,更加简洁,接口外置能够更好的接线,保证整体的美观性,以及控制系统结构能够使得控制系统与柜体及柜体与机器人之间的连接布线,使得机器人上下电、急停处理等更加便捷,且具有USB、以太网等多个接口,方便使用;还有能够使得其接线简单直观,易于维修处理,有效降低工作人员检修和拆装控制柜器件的难度;另外,第一散热风扇和第二散热风扇的上下方向错位开设置的方式能够更好的实现柜体内的冷热气流的流通保证内部更好的通风,达到有效降温的目的,从而实现上述的有益效果。
附图说明
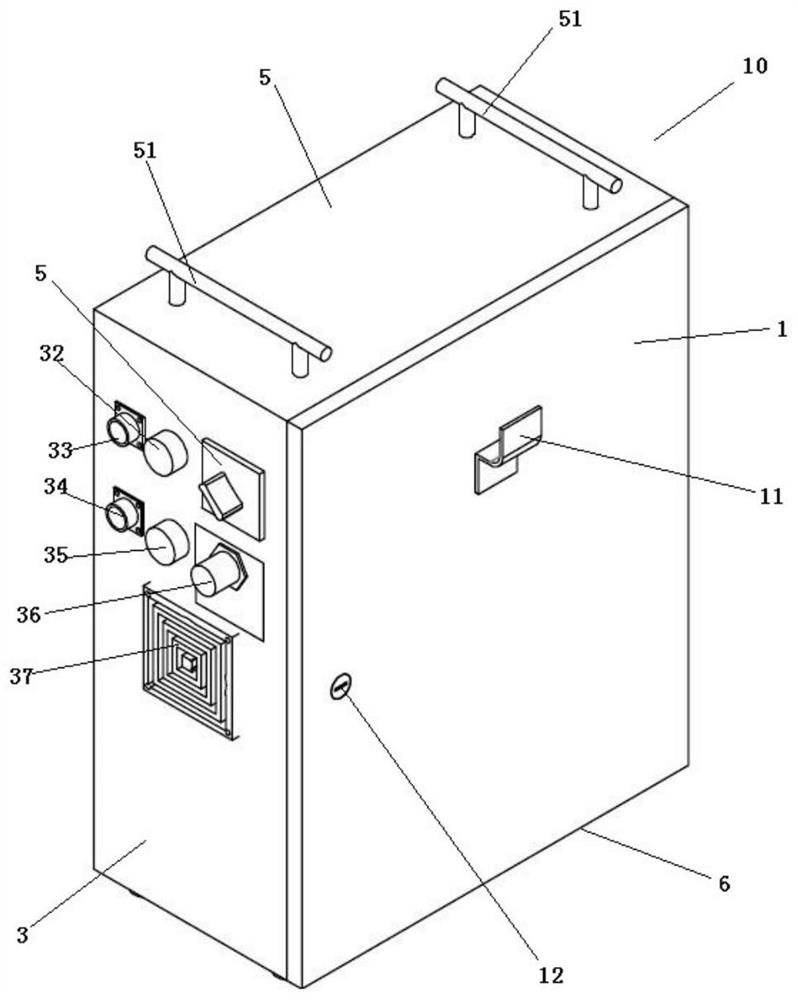
图1是本发明涉及的一种协作机器人控制柜的结构示意图;
图2是本发明涉及的一种协作机器人控制柜的另一角度结构示意图;
图3是本发明涉及的一种协作机器人控制柜的控制系统结构框图;
图4是本发明涉及的一种协作机器人控制柜的控制系统的控制架构框图。
图中:
前面柜板1;示教器支架11;锁具12;后面柜板2;左面柜板3;控制总开关31;电源指示灯32;外部供电电源接口33;电机通讯接口34;故障指示灯35;示教器接口36;第一散热风扇37;右面柜板4;第二散热风扇41;以太网接口42;USB接口43;上面柜板5;手提把手51;底面柜板6;示教器7;控制模块8;UPS电源81;控制器82;I/O传感器83;驱动电源9;柜体10;协作机器人20;电机驱动器201;电机202。
具体实施方式
为了进一步解释本发明的技术方案,下面通过具体实施例来对本发明进行详细阐述。
本实施例公开的一种协作机器人控制柜,如图1和图2所示,包括依空间方位设置的前面柜板1、后面柜板2、左面柜板3、右面柜板4、上面柜板5和底面柜板6围合构成方形体状的柜体10,其柜体10内为安装腔供控制系统的控制元件安装设置。其控制系统,如图3和图4所示包括控制模块8和驱动电源9、示教器7以及协作机器人20的电机驱动器201和电机202,下面结合附图详细描述各柜板上的器件布设结构位置关系。
所述前面板1设有示教器支架11用于架设示教器7,如图中所示的示教器支架11为有宽度的挂件结构,且居中设置能够较好的达到整体的平衡性,本实施例中所述前面柜板1为可活动打开或关闭的活动柜板并设置有供关闭锁定的锁具12,便于维修人员的使用,也能有效阻止无权限操作人员的误操作,保证内部结构和电路的安全性。
所述左面柜板3上设有控制总开关31、电源指示灯32、外部供电电源接口33、电机通讯接口34、故障指示灯35、示教器接口36和第一散热风扇37;所述控制总开关31是控制柜总电源的控制;所述电源指示灯32在正确上电之后,显示绿色,即内部电路正常,如果为其他颜色,则电路存在异常;所述外部供电电源接口33是控制柜的电源输入,外接220V电压,采用航插接头,可以方便的便于维修人员进行安装与拆解;所述电机通讯接口34一方面给电机202进行供电,另一方面可以实现控制模块8与电机202的CAN通讯,可采用航插接头,可以方便的便于维修人员进行安装与拆解;所述故障指示灯35的设置,如果内部电路正常,则显示绿色,如果为红色,则机器人处于急停状态,如果为黄色,则控制模块8内部存在指令错误或其他故障;所述示教器接口36与示教器7相连接,可以采用航插接头,可以方便的便于维修人员进行安装与拆解。
所述右面柜板4上设有第二散热风扇41、以太网接口42和USB接口43;所述太网接口42可以实现控制模块8与其他以太网设备(例如电脑、笔记本等)进行通讯,便于调试作业;所述USB接口43可以实现控制器与其他USB设备(例如U盘、鼠标键盘等)进行数据交互和通讯,便于调试作业。
上述结构中所述第一散热风扇37和第二散热风扇41分别对应前面柜板1和后面柜板2之间居中设置,并且第一散热风扇37与第二散热风扇41上下方向错位开设置,如图中所示的第一散热风扇37的安装高度位置低于第二散热风扇41的安装高度位置。
所述上面柜板5上对应左面柜板3和右面柜板4的对称两侧靠边沿分别固定设有手提把手51,采用对称式安装,左右两侧分别一个,既保证美观性,又保证取放方便。
所述下面柜板6上均布设有地脚(图中不可见),可在下面柜板6的在四个角的位置分别布设,较好的提高整体的稳定性。
上述一种协作机器人控制柜的控制系统,所述控制模块8和驱动电源9安装设置在柜体10的安装腔内,所述示教器7挂设在示教器支架11上,而协作机器人20的电机驱动器201和电机202则是柜体10外的连接,实施例中所述协作机器人20为多自由度的多轴机器人,具体是为7轴的七自由度协作机器人,所述电机驱动器201和电机202分别对应多轴机器人的各轴设置,所述驱动电源201用于通过电机通讯接口34向电机驱动器201和电机201提供电源,可采用48V电源供电,所述控制模块8包括UPS电源81、控制器82(或称为计算机控制台)和I/O传感器83,所述UPS电源81用于向控制器82和I/O传感器83提供电源,可采用24V电源供电,所述I/O传感器83连接控制器81,所述控制器支持I/O模块的可扩展性。
本实施例中所述控制器81包括有3个以太网接口与柜体10上的以太网接口对应,包括有两个USB接口与柜体10上的USB接口对应,还包括有1个VGA接口和LAN接口。所述控制器81采用CAN接口通过CAN总线与电机通讯接口34并分别与各电机驱动器201和电机202相配合对应控制连接,能够与最多7轴电机202进行数据通讯,从而实现对电机202的控制,所述I/O传感器83通过控制器81上设置I/O接口与示教器7上设有的急停按钮和使能按钮连接,所述控制器81上I/O接口为16个,还有所述示教器7通过以太网接口与控制器81进行数据传输。
本实施例中为提高控制柜及其控制系统使用的安全性,所述柜体10接地连接,所述柜体10内的控制元件与柜体10连接,可有效屏蔽干扰信号。控制器或示教器均包含急停功能要求,协作机器人控制器应有手动急停功能,该急停功能应:a)符合GB 5226.1-2008第9.2.5.4.2的要求;b)终止所有危险;c)切断机器人驱动器的驱动源;d)消除可由机器人控制的任何其他危险;e)保持有效值直至复位;f)只能手动复位,复位后不会重扇,只允许再次启动。机器人控制装置、动力交流电源电路与壳体之间绝缘电阻≥1MΩ。
综上,上述结构的协作机器人控制柜及其控制系统,结构更加简洁,接口外置能够更好的接线,保证整体的美观性,使得机器人上下电、急停处理等更加便捷。具有USB、以太网等多个接口,方便使用,其接线简单直观,易于维修处理,有效降低工作人员检修和拆装控制柜器件的难度,特别适合与多自由度协作机器人使用。
上述实施例和图式并非限定本发明的产品形态和式样,任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应视为不脱离本发明的专利范畴。
- 一种协作机器人控制柜及其控制系统
- 一种协作机器人的控制柜系统