一种无人仓库拣货机器人
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及拣货机器人领域,尤其涉及一种无人仓库拣货机器人。
背景技术
随着智慧物流的不断发展,移动搬运机器人的应用领域也在不断扩大,面对越来越复杂的应用场景,移动机器人的拣货方式也越来越多样化。
但是由于现有的用于无人仓库拣货的机器人在使用的时候还存在着一些不足之处,现有的拣货机器人对于货物的识别,检测和信息储存方面还存在着一定的缺陷,为此本发明提出一种新型的无人仓库拣货机器人来解决上述无问题。
发明内容
本发明的目的在于提供一种无人仓库拣货机器人,以解决上述技术问题。
本发明为解决上述技术问题,采用以下技术方案来实现:一种无人仓库拣货机器人,包括移动底座和储料板,其特征在于:所述移动底座的一侧下方设置有侧连接块,且侧连接块通过定位螺栓连接有侧定位板,所述移动底座的前后两侧且中间位置处设置有定位板,其中定位板的内部设置有液压气缸,且液压气缸的顶部通过伸缩板活动连接有储料板,其中伸缩板设置有两个,且两个伸缩板的顶部通过转轴分别活动连接在储料板的前后两侧中间位置处;所述储料板的顶部前后两侧设置有侧挡板,且两个侧挡板之间等间距传动连接有多个转动杆。
优选的,所述侧定位板的外侧设置有控制器和把手,其中把手呈凹型结构设置在控制器的上方。
优选的,所述储料板的底板设置有承重传感器,所述伸缩板的顶部可拆卸连接有顶杆,且顶杆的顶部通过液压伸缩杆活动连接在储料板的前端。
优选的,所述承重传感器和液压伸缩杆的输出端均与控制器的输入端电性连接。
优选的,所述液压气缸的输出端与控制器的输入端电性连接。
优选的,所述侧定位板朝向储料板的一侧,且位于储料板的上方设置有红外传感器。
优选的,所述红外传感器的输出端与控制器的输入端电性连接。
优选的,所述移动底座的底部四个拐角位置处转动连接有万向轮,且万向轮通过驱动电机传动,其中驱动电机的输入端与控制器的输出端电性连接。
优选的,所述控制器还与仓库管理系统、扫码枪通信连接。
与相关技术相比较,本发明提供的一种无人仓库拣货机器人具有如下有益效果:
本发明提供一种无人仓库拣货机器人,首先,通过将货物放置到储料板上,然后液压气缸带动伸缩板进而带动储料板上下移动,调节货物的高度,同时驱动电机带动万向轮转动,进一步的带动货物移动到所需位置处,采用上述设置,可实现无人运货,大大的节省了劳动力,同时设置红外传感器和承重传感器,可对货物的类型和重量进行检测,并将信息通过控制器发送到仓库管理系统进行信息储存,方便后台及时寻找,其次,通过设置液压伸缩杆,利用液压伸缩杆可带动储料板进行旋转,同时还设置多有个转动杆,采用上述设置,便于后期的上下料处理。
附图说明
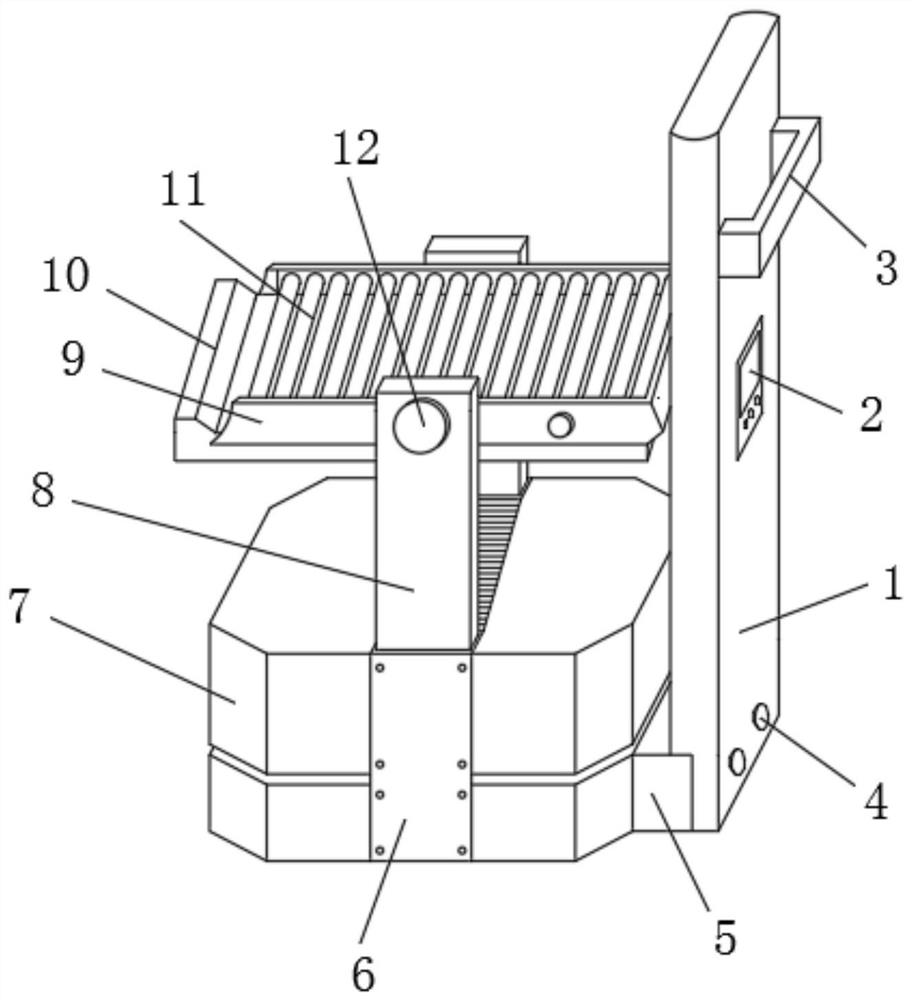
图1为本发明一种无人仓库拣货机器人的部分结构示意图;
图2为本发明一种无人仓库拣货机器人的侧视图;
图3为本发明一种无人仓库拣货机器人的结构框图;
附图标记:1、侧定位板;2、控制器;3、把手;4、定位螺栓;5、侧连接块;6、定位板;7、移动底座;8、伸缩板;9、侧挡板;10、储料板;11、转动杆;12、转轴;13、顶杆;14、液压伸缩杆;15、红外传感器;16、液压气缸;17、万向轮;18、承重传感器。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例和附图,进一步阐述本发明,但下述实施例仅仅为本发明的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其它实施例,都属于本发明的保护范围。
下面结合附图描述本发明的具体实施例,请结合参阅图1、图2以及图3,其中,图1为本发明一种无人仓库拣货机器人的部分结构示意图;图2为本发明一种无人仓库拣货机器人的侧视图;图3为本发明一种无人仓库拣货机器人的结构框图。
在具体实施过程中,如图1-3所示,一种无人仓库拣货机器人,包括移动底座7和储料板10,移动底座7的一侧下方设置有侧连接块5,且侧连接块5通过定位螺栓4连接有侧定位板1,移动底座7的前后两侧且中间位置处设置有定位板6,其中定位板6的内部设置有液压气缸16,且液压气缸16的顶部通过伸缩板8活动连接有储料板10,其中伸缩板8设置有两个,且两个伸缩板8的顶部通过转轴12分别活动连接在储料板10的前后两侧中间位置处;储料板10的顶部前后两侧设置有侧挡板9,且两个侧挡板9之间等间距传动连接有多个转动杆11。
在具体实施过程中,如图1-3所示,侧定位板1的外侧设置有控制器2和把手3,其中把手3呈凹型结构设置在控制器2的上方;储料板10的底板设置有承重传感器18,伸缩板8的顶部可拆卸连接有顶杆13,且顶杆13的顶部通过液压伸缩杆14活动连接在储料板10的前端;承重传感器18和液压伸缩杆14的输出端均与控制器2的输入端电性连接。
在具体实施过程中,如图1-3所示,侧定位板1的外侧设置有控制器2和把手3,其中把手3呈凹型结构设置在控制器2的上方;液压气缸16的输出端与控制器2的输入端电性连接。
在具体实施过程中,如图1-3所示,侧定位板1的外侧设置有控制器2和把手3,其中把手3呈凹型结构设置在控制器2的上方;侧定位板1朝向储料板10的一侧,且位于储料板10的上方设置有红外传感器15;红外传感器15的输出端与控制器2的输入端电性连接。
在具体实施过程中,如图1-3所示,侧定位板1的外侧设置有控制器2和把手3,其中把手3呈凹型结构设置在控制器2的上方;移动底座7的底部四个拐角位置处转动连接有万向轮17,且万向轮17通过驱动电机传动,其中驱动电机的输入端与控制器2的输出端电性连接。
在具体实施过程中,如图1-3所示,侧定位板1的外侧设置有控制器2和把手3,其中把手3呈凹型结构设置在控制器2的上方;控制器2还与仓库管理系统、扫码枪通信连接。
本发明的工作原理如下:
使用时,首先将货物通过扫码枪扫码后,贴入标签,然后放置到本机器人上的储料板10上,之后侧定位板1上的红外传感器15对货物进行识别,并将识别后的信号发动到控制器2,然后通过控制器2发送到仓库管理系统进行储存,同时承重传感器18对货物进行重量承重,并将承重后的信息同样通过控制器2发送到仓库管理系统进行储存,然后通过仓库管理系统发送货物存储的地址信号到控制器2,然后控制器2控制驱动电机带动万向轮17转动,直至将货物移动到所需位置处即可,然后在通过液压气缸16带动储料板10上下移动,并通过液压伸缩杆14调节储料板10转动,直至将货物移动到货物架上相应的隔板,或者工作人员手中。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 基于智能医用耗材仓库的无人拣货方法及系统
- 一种具有拣货功能的仓库作业用送货机器人