一种步进电机内嵌驱动式二自由度定位平台
文献发布时间:2023-06-19 11:03:41
技术领域
本本发明属于微装配机器人领域,特别是涉及一种带有柔性解耦机构的步进电机内嵌驱动式二自由度定位平台。
背景技术
随着微纳米技术的发展,复杂微器件在工业生产装备小型化,精密化,提升国家高精尖产业与民用科技水平发挥着越来越重要的作用。传统的工业机器人虽然能满足装配过程的灵活性与快速性,但是工业机器人关节较多,容易产生误差积累,并且尺寸较大,无法满足复杂微器件装配的高精密性。
为了提高复杂微器件装配的高精度要求,可以在工业机器人末端串联微定位平台。微定位平台随着串联机器人的运动而改变姿态,所以在工业机器人运动的过程中微定位平台需要一定的自锁力,但是传统的粘滑驱动、超声驱动方式自锁力较小,容易在工业机器人运动的过程中,由于惯性产生一定的位移,无法满足定位精度的要求,电机+滚珠丝杠驱动方式自锁力较大,适应于对自锁力要求较高的领域。传统的二自由度微定位平台的主要结构形式是采用第一级与第二级定位平台串联叠加的方式,这种结构形式对第一级定位平台电机的负载要求较高,所以本设计方案采用第一级定位平台与第二级定位平台都固连在基座上的形式,并且采用柔性解耦机构实现工作平台的二自由度运动,这种结构形式极大的减轻了第一级定位平台的电机的负载。
发明内容
本发明的目的是为了克服现有技术中的不足,提供一种带有柔性解耦机构的步进电机内嵌驱动式二自由度定位平台。为了减少定位平台所需要承受的负载,将x向定位平台机构与y向定位平台机构使用展开布置成90°角固连在基座上的形式,并增加柔性解耦机构实现工作平台的二自由度运动,柔性解耦机构设计有柔性铰链可以在电机高速运动时产生一定量的变形,从而减少工作平台所受到的冲击。由于贯通式步进电机可以内置于平台内部,减小定位平台的尺寸,所以步进电机采用贯通式的形式。最终实现了微定位平台具有尺寸小、自锁力大、反应迅速、定位精度高以及解耦功能的目的。
本发明的目的是通过以下技术方案实现的:
一种步进电机内嵌驱动式二自由度定位平台,包括基座、工作平台、x向定位平台、x向静平台、y向定位平台、y向静平台、贯通式步进电机、滚珠丝杠、交叉滚柱导轨、端盖以及两自由度柔性解耦机构;所述贯通式步进电机、滚珠丝杠为定位平台驱动部分;所述贯通式步进电机通过螺钉分别内置于x向定位平台下方与y向定位平台下方;所述x向定位平台与y向定位平台通过交叉滚柱导轨分别置于x向静平台上方与y向静平台上方;所述x向静平台与y向静平台均设置于基座上;
所述滚珠丝杠安装在x向静平台和y向静平台上并与贯通式步进电机相配合;贯通式步进电机用于带动x向定位平台与y向定位平台在滚珠丝杠上运动;所述端盖装配在x向静平台与y向静平台的外壁,并与滚珠丝杠配合;所述y向定位平台上安装有能够沿着x向运动的导轨,所述工作平台通过交叉滚柱导轨连接在y向定位平台上方,并能够沿着y向定位平台上方的x向导轨沿着x方向运动,所述y向定位平台能够带着工作平台沿着y向运动;所述两自由度柔性解耦机构由上框和下板两部分组成,所述上框与工作平台连接,所述下板与x向定位平台连接;实现两自由度微定位平台的运动解耦;所述x向定位平台能够通过两自由度柔性解耦机构带动工作平台向着x向运动,实现工作平台的两自由度运动。
进一步的,所述下板上一体设置有一组叶型铰链与一组S型铰链,所述上框上设置有一组叶型铰链;所述下板上设置有滚轮轴,所述滚轮轴上安装有滚针轴承,所述滚针轴承与上框的框壁滚动连接;所述滚针轴承能够沿着框壁在y方向相对滚动,而当x向定位平台沿着x方向运动时能够带动工作平台在x向滑动,实现两自由度工作平台的两自由度运动。
进一步的,所述x向定位平台与y向定位平台呈90°角交叉展开布置,利于减少第一级单自由度运动平台的电机的所需要的负载。
进一步的,所述工作平台通过x向交叉滚柱导轨滑动连接在y向定位平台上,工作平台在受到x的力时能够向x方向沿着交叉滚柱导轨运动,同时y向定位平台能够带动工作平台向y方向运动。
与现有技术相比,本发明的技术方案所带来的有益效果是:
1.本发明适用于连接在工业机器人末端,能实现两个自由度的精确定位。本发明驱动方式采用步进电机驱动,通过滚珠丝杠传动具有一定的自锁力,步进电机采用贯通式的结构内置于定位平台内部,极大的减少了平台的尺寸,运动空间更加小,运动方式更加灵活。
2.解耦机构下板主体机构是S型铰链与叶型铰链,解耦机构上框主体机构是叶型铰链与导向板即框壁。柔性铰链可以在受力较大的情况下,产生一定量的形变量减少定位平台高速运动时所受到的冲击;解耦机构下板的S型铰链与叶型铰链可以自适应调节自身的拉伸长度从而消除装配的间隙,解耦机构上框叶型铰链的变形也可以消除装配误差带来的系统干涉,同时也可以通过自身的微小变形消除在定位平台同时向x和y向运动时带来的系统瞬时干涉。
3.两个单自由度定位平台呈90°角交叉展开布置,相对于传动的将两级单自由度运动平台串联叠加摆放的形式,有利于减少第一级单自由度运动平台的电机的所需要的负载。
4.与此同时解耦机构上框的框壁具有限位的作用,通过框壁与滚针轴承的相对运动的位移的极限,对定位平台具有限位作用。可以减少定位平台的限位机构,有利于减少定位平台的尺寸。
附图说明
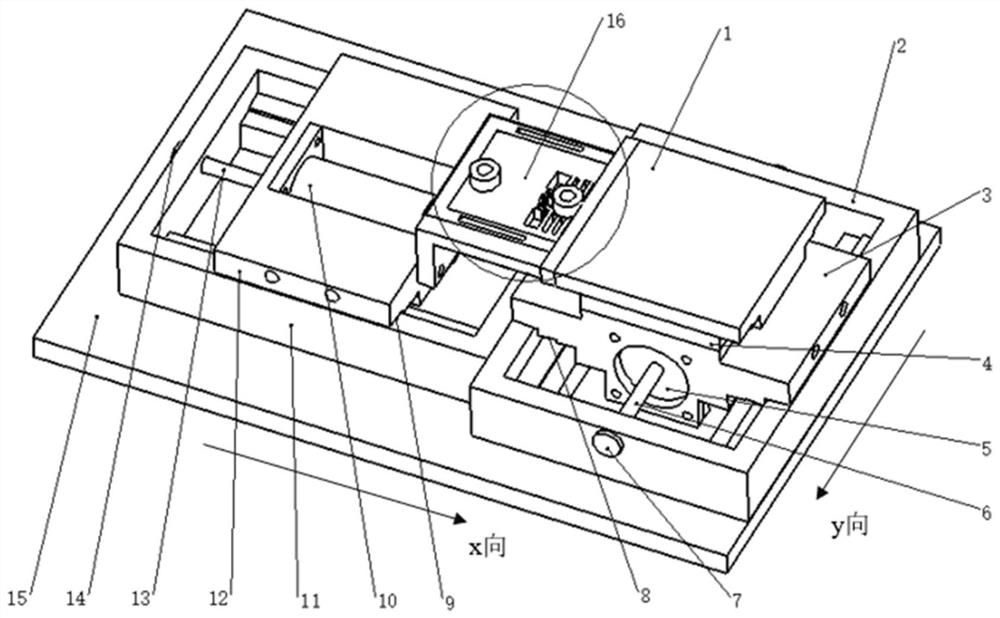
图1为本发明的三维结构示意图;
图2为本发明的整体爆炸视图;
图3为图1中两自由度柔性解耦机构的放大结构示意图。
具体实施方式
以下结合附图和具体实施例对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
请参阅图1~图3,一种带有柔性解耦机构的步进电机内嵌驱动式二自由度定位平台,定位平台包括x向运动机构与y向运动机构以及基座15,y向运动机构包括工作平台1、y向静平台2、y向定位平台3、交叉滚柱导轨4、贯通式步进电机5、滚珠丝杠6、端盖7、交叉滚柱导轨8,x向运动机构包括交叉滚柱导轨9、贯通式步进电机10、x向静平台11、x向定位平台12、滚珠丝杠13、端盖14以及二自由度解耦机构16。
将y向定位平台3与x向定位平台12运动方向呈90°角交叉布置并通过二自由度解耦机构组成一组两自由度微定位平台。
工作平台1通过x向的交叉滚柱导轨4滑动连接在y向定位平台3上,并可以沿着x向沿着交叉滚柱导轨4自由滑动,y向定位平台3通过交叉滚柱导轨8滑动连接在y向静平台2上,贯通式步进电机5内置于y向定位平台3,并通过螺钉连接,滚珠丝杠6与贯通式步进电机5相配合,贯通式步进电机5可以沿着滚珠丝杠6移动,并带动y向定位平台3沿着y向运动,滚珠丝杠6两端与y向静平台2相配合。端盖7外置于y向静平台2与滚珠丝杠6相配合。
y向静平台2通过螺栓置于基座15上。基座15上还有x向静平台11,x向定位平台12通过交叉滚柱导轨9滑动连接,贯通式步进电机10通过螺钉内置于x向定位平台12内,可以带动x向定位平台12沿着交叉滚柱导轨9向x向滑动,滚珠丝杠13与贯通式步进电机10相配合,两端与x向静平台相配合,端盖14外置于x向静平台与滚珠丝杠13相配合。
二自由度解耦机构16主要分为上框与下板,二自由度解耦机构16的上框与工作平台1固连,二自由度解耦机构16的下板与x向定位平台12固连。
本发明驱动机构采用贯通式步进电机,有利于减少平台的尺寸大小,同时步进电机具有一定的自锁力,有利于在平台使用过程中保持定位精度。柔性解耦机构主要结构由四个柔性铰链与一对滚针轴承构成,柔性铰链机构可以实现自我调整,并且在平台在高速运动时可以起到缓冲作用。
本发明的工作原理具体如下:
请参阅图1~图3,本发明在使用时,基座15上固连有x向静平台11与y向静平台2,在x向的运动方向上,贯通式步进电机10通过滚珠丝杠13将旋转运动转化为沿着x向直线运动,贯通式步进电机10与x向定位平台12固连,贯通式步进电机10沿着x向的移动可以带动x向定位平台12沿着交叉滚柱导轨9在x向静平台11上向着x向运动。同理,在y向的运动方向上,贯通式步进电机5通过滚珠丝杠6将旋转运动转化为沿着y向直线运动,贯通式步进电机5与y向定位平台3固连,贯通式步进电机5沿着y向的移动可以带动y向定位平台3沿着交叉滚柱导轨8在y向静平台2上向着y向运动。在y向定位平台3上有沿着x向布置的交叉滚柱导轨4,工作平台1在y向定位平台3向着y向运动时,由于导轨的受到的侧向力也可以沿着y向运动。与此同时x向定位平台12通过两自由度柔性解耦机构16推动工作平台1沿着交叉滚柱导轨4向着x向运动,但是工作平台1向着y向运动时由于两自由度柔性解耦机构16不会受到x向定位平台12的干涉。
两自由度柔性解耦机构16主要结构有上框与下板与滚针轴承,上框固连在工作平台1上,下板固连在x向定位平台上。其中上框通过前滚针轴承16-11与前框壁16-10滚动摩擦,后滚针轴承16-4与后框壁16-2滚动摩擦,实现沿着y方向的相对运动,在x向上,前滚针轴承16-11与前框壁16-10,后滚针轴承16-4与后框壁16-2滚动摩擦相互限制x向的移动,这样就可以实现两个方向的解耦作用。与此同时它们也具有限位机构的作用。前滚针轴承16-11与后滚针轴承16-4安装在前滚轮轴16-9与后滚轮轴16-3上,下板上存在着16-8与16-12的叶型铰链与16-6与16-7的S型铰链,这两对柔性铰链在受力下具有自调节的作用,可以消除安装的间隙或者安装干涉。当定位平台沿着y向运动时,可以通过叶型铰链16-1和16-5的变形避免快速运动过程中带来的瞬时冲击,同时叶型铰链16-1和16-8的变形也可以消除由于装配带来的系统误差。
本发明并不限于上文描述的实施方式。以上对具体实施方式的描述旨在描述和说明本发明的技术方案,上述的具体实施方式仅仅是示意性的,并不是限制性的。在不脱离本发明宗旨和权利要求所保护的范围情况下,本领域的普通技术人员在本发明的启示下还可做出很多形式的具体变换,这些均属于本发明的保护范围之内。
- 一种步进电机内嵌驱动式二自由度定位平台
- 一种二自由度压电驱动纳米定位平台