一种无人机雷达清洁方法和无人机
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及清洁领域,尤指一种无人机雷达清洁方法和无人机。
背景技术
无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
雷达作为无人机上重要的部件,需要在使用时保持洁净的状态,因此,现有的无人机在使用之前,通常由工作人员对雷达的表面的表面进行清洁,但工作人员也需要逐个对无人机进行清洁,清洁效率较低,不利于无人机的使用。
发明内容
本发明的目的是提供一种无人机雷达清洁方法和无人机,在雷达表面存在脏污时,无人机能够自动清洁,方便了无人机的使用。
本发明提供的技术方案如下:
一种无人机雷达清洁方法,包括:控制器向感应器发送检测信号;所述感应器检测雷达表面的脏污情况,并向所述控制器发送第一脏污信号;所述控制器接收并解析所述第一脏污信号;当所述控制器解析到所述雷达表面存在脏污时,所述控制器向所述清洁喷嘴发送清洁信号;所述清洁喷嘴接收到所述清洁信号时,所述清洁喷嘴向所述雷达表面喷射清洁液。
进一步,步骤所述控制器接收并解析所述第一脏污信号之后还包括:当所述控制器解析到所述雷达表面存在脏污时,所述控制器分析得到所述雷达表面的脏污参数;所述控制器判断所述脏污参数是否大于预设脏污参数;当所述脏污参数大于预设脏污参数时,所述控制器向所述雨刮器发送雨刮信号;所述雨刮器启动,以对所述雷达表面进行清洁。
进一步,步骤所述雨刮器启动以对所述雷达表面进行清洁之后还包括:所述控制器将所述脏污参数作为历史脏污参数存储,跳转执行步骤所述感应器检测雷达表面的脏污情况,并向所述控制器发送第一脏污信号;步骤所述控制器向所述雨刮器发送雨刮信号之后还包括:所述控制器分析所述脏污参数与历史脏污参数的差值,是否小于预设差异参数;当所述脏污参数与历史脏污参数的差值小于预设差异参数时,所述控制器向报警器发送报警信号;所述报警器在接收到所述报警信号时报警。
进一步,步骤所述控制器向所述雨刮器发送雨刮信号之后还包括:所述控制器依据所述脏污参数,及预设清洁表,分析得到对应的清洁次数,并形成清洁次数信号;所述预设清洁表中脏污参数与清洁次数相对应;所述控制器向所述雨刮器发送清洁次数信号。
进一步,步骤所述控制器向所述雨刮器发送雨刮信号之后还包括:当所述控制器解析到所述雷达表面存在脏污时,所述控制器分析得到所述雷达表面的脏污分布状态;所述控制器依据所述雷达表面的脏污分布状态,分析得到所述雨刮器的最小摆动幅度,并形成幅度信号;所述控制器向所述雨刮器发送幅度信号。
本发明的目的之一还在于提供一种无人机,包括机架,所述机架上设有控制器、雷达、感应器和清洁喷嘴;所述感应器检测雷达表面的脏污情况,以及用于向所述控制器发送第一脏污信号;所述控制器用于向感应器发送检测信号,接收并解析所述第一脏污信号;当所述控制器解析到所述雷达表面存在脏污时,所述控制器还用于向所述清洁喷嘴发送清洁信号;所述清洁喷嘴用于在接收到所述清洁信号时,向所述雷达表面喷射清洁液。
进一步,所述机架上还设有用于对所述雷达表面清洁的雨刮器;所述控制器还用于分析得到所述雷达表面的脏污参数,以及判断所述脏污参数是否大于预设脏污参数;所述控制器用于在所述脏污参数大于预设脏污参数时,向所述雨刮器发送雨刮信号;所述雨刮器用于在接收到所述雨刮信号时启动,对所述雷达表面进行清洁。
进一步,所述机架上还设有报警器;所述控制器用于将所述脏污参数作为历史脏污参数存储,以及将分析所述脏污参数与历史脏污参数的差值,是否小于预设差异参数;当所述脏污参数与历史脏污参数的差值小于预设差异参数时,所述控制器用于向所述报警器发送报警信号;所述报警器在接收到所述报警信号时报警。
进一步,所述控制器用于依据所述脏污参数,及预设清洁表,分析得到对应的清洁次数,并形成清洁次数信号;所述预设清洁表中脏污参数与清洁次数相对应;所述控制器用于向所述雨刮器发送清洁次数信号。
进一步,所述控制器分析得到所述雷达表面的脏污分布状态,并依据所述雷达表面的脏污分布状态,分析得到所述雨刮器的最小摆动幅度,并形成幅度信号,并向所述雨刮器发送所述幅度信号。
与现有技术相比,本发明提供的一种无人机雷达清洁方法和无人机具有以下有益效果:
1、通过无人机上控制器与感应器的设置,实现雷达表面的脏污检测,继而实现了雷达表面脏污的实现,在雷达表面存在脏污时,无人机能够自动清洁,方便了无人机的使用。
2、通过雨刮器的设置,在雷达表面脏污程度较大时,控制器能够控制器雨刮器启动,继而在喷射有清洁液的雷达表面实现雨刮动作,进一步了无人机的自清洁效果,方便了无人机的使用。
3、通过预设清洁表的设置,实现了雨刮器的定时清洁,增加了雷达表面清洁的效率。
4、通过历史脏污参数的设定,便于无人机在二次清洁过程中,对一次清洁效果的再确认,以及雷达表面脏污性质的判断,且雷达表面的脏污属于不可自清除的脏污时,无人机也能够报警以通知工作人员及时处理。
5、控制器通过识别雷达表面脏污的图像,来获取脏污的分布状态,控制器即可对雷达表面仅有脏污的地方进行清洁,增加了无人机的自清洁效率。
附图说明
下面将以明确易懂的方式,结合附图说明优选实施方式,对一种无人机雷达清洁方法和无人机的上述特性、技术特征、优点及其实现方式予以进一步说明。
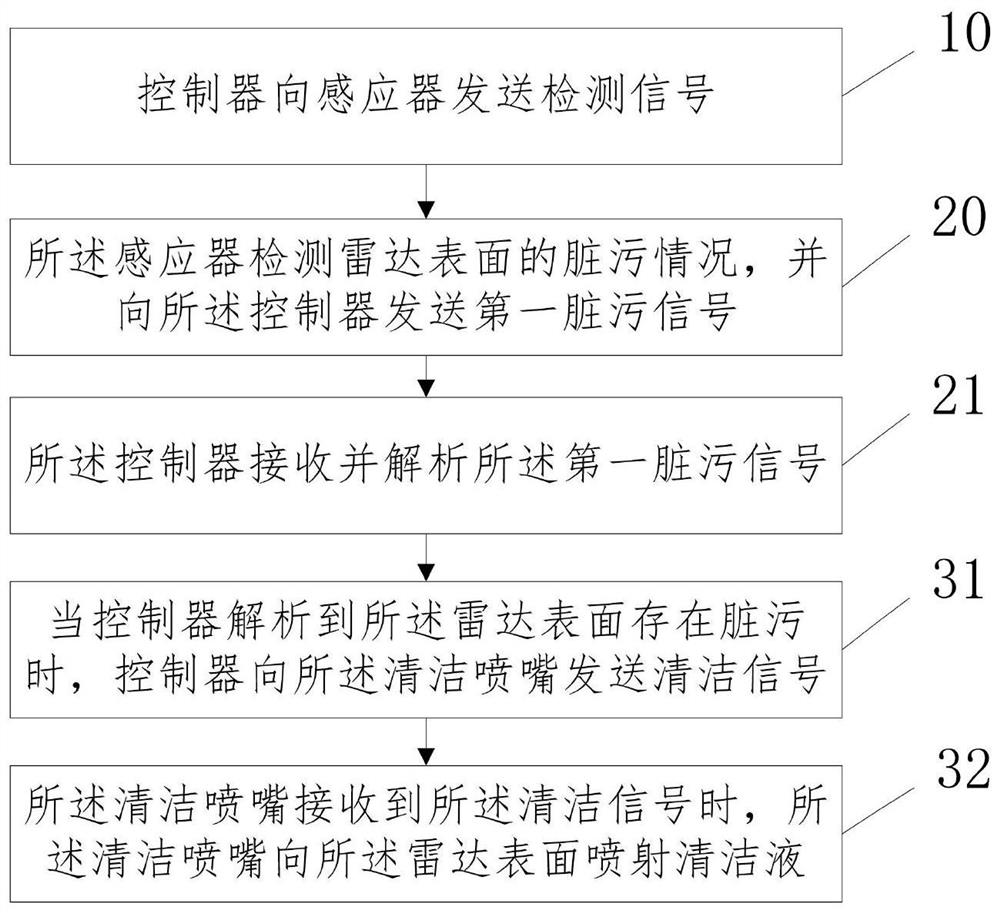
图1是本发明一种无人机雷达清洁方法的流程示意图;
图2是本发明另一种无人机雷达清洁方法的流程示意图;
图3是本发明又一种无人机雷达清洁方法的流程示意图;
图4是本发明再一种无人机雷达清洁方法的流程示意图;
图5是本发明一种无人机的结构示意图;
图6是本发明一种无人机中清洁喷嘴的位置示意图。
附图标号说明:1.机架,2.雷达;3.雨刮器,4.清洁喷嘴。
具体实施方式
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
为使图面简洁,各图中只示意性地表示出了与发明相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
根据本发明提供的一种实施例,如图1所示,一种无人机雷达清洁方法,包括:
S10、控制器向感应器发送检测信号。
控制器主要指设置在无人机上的中央控制器或微型计算机,感应器为设置在无人机上的感应器,能够用于检测雷达表面的脏污情况;具体地,本实施例中,感应器为图像传感器。
当无人机启动后,控制器即可自行向控制器发送检测信号;或工作人员需要定期对无人机进行清洁时,工作人员能够控制与无人机适配的远程控制器,远程控制器能够向无人机的控制器发送控制信号后,控制器即可向感应器发送检测信号。
S20、所述感应器检测雷达表面的脏污情况,并向所述控制器发送第一脏污信号。
S21、所述控制器接收并解析所述第一脏污信号。
感应器在接收到检测需要时,即可拍摄雷达表面的脏污情况,并将拍摄到的图像信息发送给控制器;而控制器在接收到感应器发送的图像后,即可对雷达表面的图像进行图像分析,以确定图像表面是否存在脏污。
S31、当所述控制器解析到所述雷达表面存在脏污时,所述控制器向所述清洁喷嘴发送清洁信号。
S32、所述清洁喷嘴接收到所述清洁信号时,所述清洁喷嘴向所述雷达表面喷射清洁液。
控制器在分析雷达表面的图像后,分析得到雷达表面存在脏污时,控制器即可向清洁喷嘴发送清洁信号,清洁喷嘴能够向雷达的表面喷射清洁液,实现了雷达表面清洁的效果,本实施例中,工作人员能够自由更换无人机内的清洁液。
本实施例中,通过无人机上控制器与感应器的设置,实现雷达表面的脏污检测,继而实现了雷达表面脏污的实现,在雷达表面存在脏污时,无人机能够自动清洁,方便了无人机的使用。
根据本发明提供的另一种实施例,如图2所示,一种无人机雷达清洁方法,包括:
S10、控制器向感应器发送检测信号。
S20、所述感应器检测雷达表面的脏污情况,并向所述控制器发送第一脏污信号。
S21、所述控制器接收并解析所述第一脏污信号。
S31、当所述控制器解析到所述雷达表面存在脏污时,所述控制器向所述清洁喷嘴发送清洁信号。
S32、所述清洁喷嘴接收到所述清洁信号时,所述清洁喷嘴向所述雷达表面喷射清洁液。
S41、当所述控制器解析到所述雷达表面存在脏污时,所述控制器分析得到所述雷达表面的脏污参数。
控制器能够将雷达表面上脏污的浓度或脏污的密度作为脏污参数,控制器通过分析雷达表面的脏污参数,来分析到雷达表面的脏污程度,来确定需要清洁的程度。
S421、所述控制器判断所述脏污参数是否大于预设脏污参数。
控制器通过判断检测到的脏污参数与预设脏污参数之间的大小,来分析当前的脏污程度是否对无人机的使用造成影响。
S422、当所述脏污参数大于预设脏污参数时,所述控制器向所述雨刮器发送雨刮信号。
S61、所述雨刮器启动,以对所述雷达表面进行清洁。
当脏污参数大于预设脏污参数时,表明雷达表面的脏污过强,且已经存在对无人机的使用造成影响的可能,因此,控制器向雨刮器发送雨刮信号;雨刮器在接收到雨刮信号时,则开始运动,对雷达的表面进行清洁。
同时由于在雷达表面存在脏污时,清洁喷嘴也会向雷达表面喷射清洁液,因此,雷达表面能够受到清洁液与雨刮器的双重清洁。
本实施例中,通过雨刮器的设置,在雷达表面脏污程度较大时,控制器能够控制器雨刮器启动,继而在喷射有清洁液的雷达表面实现雨刮动作,进一步了无人机的自清洁效果,方便了无人机的使用。
优选地,步骤S422之后还包括:
S441、所述控制器依据所述脏污参数,及预设清洁表,分析得到对应的清洁次数,并形成清洁次数信号;所述预设清洁表中脏污参数与清洁次数相对应。
S442、所述控制器向所述雨刮器发送清洁次数信号。
本实施例中,当控制器对雷达表面的图像进行识别后,控制器能够分析到雷达表面的脏污状态,工作人员能够在控制器内设置预设清洁表,预设清洁表中脏污参数与清洁次数相对应,脏污参数越大,对应的清洁次数也越大。
本实施例中,通过预设清洁表的设置,实现了雨刮器的定时清洁,增加了雷达表面清洁的效率。
根据本发明提供的又一种实施例,如图3所示,一种无人机雷达清洁方法,包括:
S10、控制器向感应器发送检测信号。
S20、所述感应器检测雷达表面的脏污情况,并向所述控制器发送第一脏污信号。
S21、所述控制器接收并解析所述第一脏污信号。
S31、当所述控制器解析到所述雷达表面存在脏污时,所述控制器向所述清洁喷嘴发送清洁信号。
S32、所述清洁喷嘴接收到所述清洁信号时,所述清洁喷嘴向所述雷达表面喷射清洁液。
S41、当所述控制器解析到所述雷达表面存在脏污时,所述控制器分析得到所述雷达表面的脏污参数。
S421、所述控制器判断所述脏污参数是否大于预设脏污参数。
S422、当所述脏污参数大于预设脏污参数时,所述控制器向所述雨刮器发送雨刮信号。
S43、所述控制器分析所述脏污参数与历史脏污参数的差值,是否小于预设差异参数。
S61、所述雨刮器启动,以对所述雷达表面进行清洁。
S62、所述控制器将所述脏污参数作为历史脏污参数存储,跳转执行步骤S20。
S71、当所述脏污参数与历史脏污参数的差值小于预设差异参数时,所述控制器向报警器发送报警信号。
S72、所述报警器在接收到所述报警信号时报警。
在清洁完成之后,控制器能够将本次清洁之前的脏污参数作为历史记录,以便之后确认环节进行再确认。
在步骤S62执行完成之后,再跳转执行步骤S20,实现了雷达表面清洁动作的再确认。
当所述脏污参数小于或等于预设脏污参数时,表明之前一次的清洁动作已经有效,已经将雷达表面的大部分脏污清除,雷达表面当前的脏污对无人机的使用影响较小
当所述脏污参数仍然大于预设脏污参数时,无人机当前也难以得知之前一次的清洁动作是否有效,且无论是否有效,无人机继续进行清洁动作,增加无人机的清洁效果。
通过再次获取到的脏污参数与历史脏污参数比较即可,来判断雷达表面的脏污状态是否有所改变,若脏污状态没有变化时,表明雷达表面存在难以清除的脏污,需要人工清除,控制器向报警器发送报警信号,以提示工作人员当前的异常状态。
本实施例中,通过历史脏污参数的设定,便于无人机在二次清洁过程中,对一次清洁效果的再确认,以及雷达表面脏污性质的判断,且雷达表面的脏污属于不可自清除的脏污时,无人机也能够报警以通知工作人员及时处理。
根据本发明提供的再一种实施例,如图3和图4所示,一种无人机雷达清洁方法,包括:
S10、控制器向感应器发送检测信号。
S20、所述感应器检测雷达表面的脏污情况,并向所述控制器发送第一脏污信号。
S21、所述控制器接收并解析所述第一脏污信号。
S31、当所述控制器解析到所述雷达表面存在脏污时,所述控制器向所述清洁喷嘴发送清洁信号。
S32、所述清洁喷嘴接收到所述清洁信号时,所述清洁喷嘴向所述雷达表面喷射清洁液。
S41、当所述控制器解析到所述雷达表面存在脏污时,所述控制器分析得到所述雷达表面的脏污参数。
S421、所述控制器判断所述脏污参数是否大于预设脏污参数。
S422、当所述脏污参数大于预设脏污参数时,所述控制器向所述雨刮器发送雨刮信号。
S43、所述控制器将分析所述脏污参数与历史脏污参数的差值,是否小于预设差异参数。
S441、所述控制器依据所述脏污参数,及预设清洁表,分析得到对应的清洁次数,并形成清洁次数信号;所述预设清洁表中脏污参数与清洁次数相对应。
S442、所述控制器向所述雨刮器发送清洁次数信号。
S51、当所述控制器解析到所述雷达表面存在脏污时,所述控制器分析得到所述雷达表面的脏污分布状态。
S52、所述控制器依据所述雷达表面的脏污分布状态,分析得到所述雨刮器的最小摆动幅度,并形成幅度信号。
S53、所述控制器向所述雨刮器发送幅度信号。
S61、所述雨刮器启动,以对所述雷达表面进行清洁。
S62、所述控制器将所述脏污参数作为历史脏污参数存储,跳转执行步骤S20。
S71、当所述脏污参数与历史脏污参数的差值小于预设差异参数时,所述控制器向报警器发送报警信号。
S72、所述报警器在接收到所述报警信号时报警。
本实施例中,当控制器向雨刮器发送雨刮信号之后,控制器能够分析得到雷达表面的脏污分布状态,同时工作人员需要预先设置在雨刮器在雷达表面的运动路径,继而控制器能够计算出当前脏污状态下,雨刮器需要的摆动幅度,继而将该摆动幅度发送给雨刮器。
本实施例中,控制器通过识别雷达表面脏污的图像,来获取脏污的分布状态,控制器即可对雷达表面仅有脏污的地方进行清洁,增加了无人机的自清洁效率。
根据本发明提供的一种实施例,如图5和图6所示,一种无人机,包括机架1,所述机架1上设有控制器(图中未示出)、雷达2、感应器(图中未示出)和清洁喷嘴4。
感应器能够检测雷达2表面的脏污情况,以及用于向控制器发送第一脏污信号。
控制器用于向感应器发送检测信号,接收并解析所述第一脏污信号。
当控制器解析到所述雷达2表面存在脏污时,控制器还用于向所述清洁喷嘴4发送清洁信号。
清洁喷嘴4用于在接收到清洁信号时,向雷达2表面喷射清洁液。
控制器主要指设置在无人机上的中央控制器或微型计算机,感应器为设置在无人机上的感应器,能够用于检测雷达2表面的脏污情况;具体地,本实施例中,感应器为图像传感器。
当无人机启动后,控制器即可自行向控制器发送检测信号;或工作人员需要定期对无人机进行清洁时,工作人员能够控制与无人机适配的远程控制器,远程控制器能够向无人机的控制器发送控制信号后,控制器即可向感应器发送检测信号。
感应器在接收到检测需要时,即可拍摄雷达2表面的脏污情况,并将拍摄到的图像信息发送给控制器;而控制器在接收到感应器发送的图像后,即可对雷达2表面的图像进行图像分析,以确定图像表面是否存在脏污。
控制器在分析雷达2表面的图像后,分析得到雷达2表面存在脏污时,控制器即可向清洁喷嘴4发送清洁信号,清洁喷嘴4能够向雷达2的表面喷射清洁液,实现了雷达2表面清洁的效果,本实施例中,工作人员能够自由更换无人机内的清洁液。
本实施例中,通过无人机上控制器与感应器的设置,实现雷达2表面的脏污检测,继而实现了雷达2表面脏污的实现,在雷达2表面存在脏污时,无人机能够自动清洁,方便了无人机的使用。
根据本发明提供的另一种实施例,如图5和图6所示,一种无人机,本实施例与第一种实施例的区别在于雨刮器3的设置。
在第一种结构实施例的基础上,本实施例中,机架1上还设有用于对所述雷达2表面清洁的雨刮器3。
控制器还用于分析得到雷达2表面的脏污参数,以及判断脏污参数是否大于预设脏污参数。
控制器用于在脏污参数大于预设脏污参数时,向雨刮器3发送雨刮信号。
雨刮器3用于在接收到雨刮信号时启动,对雷达2表面进行清洁。
控制器能够将雷达2表面上脏污的浓度或脏污的密度作为脏污参数,控制器通过分析雷达2表面的脏污参数,来分析到雷达2表面的脏污程度,来确定需要清洁的程度。
控制器通过判断检测到的脏污参数与预设脏污参数之间的大小,来分析当前的脏污程度是否对无人机的使用造成影响。
当脏污参数大于预设脏污参数时,表明雷达2表面的脏污过强,且已经存在对无人机的使用造成影响的可能,因此,控制器向雨刮器3发送雨刮信号;雨刮器3在接收到雨刮信号时,则开始运动,对雷达2的表面进行清洁。
同时由于在雷达2表面存在脏污时,清洁喷嘴4也会向雷达2表面喷射清洁液,因此,雷达2表面能够受到清洁液与雨刮器3的双重清洁。
本实施例中,通过雨刮器3的设置,在雷达2表面脏污程度较大时,控制器能够控制器雨刮器3启动,继而在喷射有清洁液的雷达2表面实现雨刮动作,进一步了无人机的自清洁效果,方便了无人机的使用。
优选地,控制器用于依据所述脏污参数,及预设清洁表,分析得到对应的清洁次数,并形成清洁次数信号;预设清洁表中脏污参数与清洁次数相对应。
控制器用于向雨刮器3发送清洁次数信号。
本实施例中,当控制器对雷达2表面的图像进行识别后,控制器能够分析到雷达2表面的脏污状态,工作人员能够在控制器内设置预设清洁表,预设清洁表中脏污参数与清洁次数相对应,脏污参数越大,对应的清洁次数也越大。
本实施例中,通过预设清洁表的设置,实现了雨刮器3的定时清洁,增加了雷达2表面清洁的效率。
根据本发明提供的又一种实施例,如图5和图6所示,一种无人机,本实施例与第二种结构实施例的区别在于报警器的设置。
在第二种结构实施例的基础上,本实施例中,机架1上还设有报警器(图中未示出)。
控制器用于将所述脏污参数作为历史脏污参数存储,以及将分析脏污参数与历史脏污参数的差值,是否小于预设差异参数。
当脏污参数与历史脏污参数的差值小于预设差异参数时,控制器用于向报警器发送报警信号。
报警器在接收到所述报警信号时报警。
在清洁完成之后,控制器能够将本次清洁之前的脏污参数作为历史记录,以便之后确认环节进行再确认。
当脏污参数小于或等于预设脏污参数时,表明之前一次的清洁动作已经有效,已经将雷达2表面的大部分脏污清除,雷达2表面当前的脏污对无人机的使用影响较小
当脏污参数仍然大于预设脏污参数时,无人机当前也难以得知之前一次的清洁动作是否有效,且无论是否有效,无人机继续进行清洁动作,增加无人机的清洁效果。
通过再次获取到的脏污参数与历史脏污参数比较即可,来判断雷达2表面的脏污状态是否有所改变,若脏污状态没有变化时,表明雷达2表面存在难以清除的脏污,需要人工清除,控制器向报警器发送报警信号,以提示工作人员当前的异常状态。
本实施例中,通过历史脏污参数的设定,便于无人机在二次清洁过程中,对一次清洁效果的再确认,以及雷达2表面脏污性质的判断,且雷达2表面的脏污属于不可自清除的脏污时,无人机也能够报警以通知工作人员及时处理。
根据本发明提供的再一种实施例,如图5和图6所示,一种无人机,机架1上设有控制器、雷达2、感应器、雨刮器3、报警器和清洁喷嘴4。
感应器检测雷达2表面的脏污情况,以及用于向控制器发送第一脏污信号。
控制器用于向感应器发送检测信号,接收并解析第一脏污信号。
当控制器解析到所述雷达2表面存在脏污时,控制器还用于向清洁喷嘴4发送清洁信号。
清洁喷嘴4用于在接收到所述清洁信号时,向雷达2表面喷射清洁液。
控制器还用于分析得到所述雷达2表面的脏污参数,以及判断脏污参数是否大于预设脏污参数。
控制器用于将脏污参数作为历史脏污参数存储,以及将分析脏污参数与历史脏污参数的差值,是否小于预设差异参数。
控制器用于在所述脏污参数大于预设脏污参数时,向雨刮器3发送雨刮信号。
控制器用于依据脏污参数,及预设清洁表,分析得到对应的清洁次数,并形成清洁次数信号;预设清洁表中脏污参数与清洁次数相对应。
控制器用于向雨刮器3发送清洁次数信号。
控制器分析得到雷达2表面的脏污分布状态,并依据雷达2表面的脏污分布状态,分析得到雨刮器3的最小摆动幅度,并形成幅度信号,并向雨刮器3发送所述幅度信号。
雨刮器3用于在接收到雨刮信号时启动,对雷达2表面进行清洁。
当脏污参数与历史脏污参数的差值小于预设差异参数时,控制器用于向报警器发送报警信号。
报警器在接收到报警信号时报警。
本实施例中,当控制器向雨刮器3发送雨刮信号之后,控制器能够分析得到雷达2表面的脏污分布状态,同时工作人员需要预先设置在雨刮器3在雷达2表面的运动路径,继而控制器能够计算出当前脏污状态下,雨刮器3需要的摆动幅度,继而将该摆动幅度发送给雨刮器3。
本实施例中,控制器通过识别雷达2表面脏污的图像,来获取脏污的分布状态,控制器即可对雷达2表面仅有脏污的地方进行清洁,增加了无人机的自清洁效率。
应当说明的是,上述实施例均可根据需要自由组合。以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种无人机雷达清洁方法和无人机
- 一种用于无人机的雷达系统及无人机