引导不确定性-意识策略优化:结合无模型和基于模型的策略用于有效采样学习
文献发布时间:2023-06-19 11:03:41
本申请要求于2019年11月20日提交的、申请号为62938101、标题为“引导不确定性-意识策略优化:将结合无模型的基于模型的策略用于有效采样学习(GUIDEDUNCERTAINTY-AWARE POLICY OPTIMIZATION:COMBINING MODEL-FREE AND MODEL-BASEDSTRATEGIES FOR SAMPLE EFFICIENT LEARNING)”的美国临时申请号的权益,其全部内容通过引用合并于此。
技术领域
至少一个实施例涉及训练机器人以执行任务。例如,至少一个实施例涉及使用根据本文描述的各种新颖技术的模型和人工智能训练机器人。
背景技术
训练机器人以准确地执行任务会占用大量的内存、时间或计算资源。有时,这可能导致训练需要极大量的训练数据,而对于某些任务而言,这可能是无法获得的,或者获得的成本过高。在某些示例中,训练可能会导致系统过于脆弱或不稳定,从而无法可靠地收敛于任务的解决方案。因此,寻找更有效地和更高效地训练方法是一个重要的问题。
附图说明
图1示出了根据至少一个实施例的指导机器人使用基于模型的方法和无模型的方法的组合来完成任务的过程;
图2示出了根据至少一个实施例的用于基于模型的机器人控制系统的感知模块的概述。
图3示出了根据至少一个实施例的用于无模型机器人控制系统的感知模块的概述;
图4示出了根据至少一个实施例的用于机器人控制系统的训练图像的示例;
图5示出了根据至少一个实施例的用于各种机器人控制方法的测试结果的示例;
图6示出了根据至少一个实施例的用于执行任务的测试结果的表格;
图7示出了根据至少一个实施例的过程,该过程由于由计算机系统执行而使计算机系统使用基于模型的方法和无模型的方法的组合来指导机器人执行任务;
图8A示出了根据至少一个实施例的推理和/或训练逻辑;
图8B根据至少一个实施例的推理和/或训练逻辑;
图9示出了根据至少一个实施例的神经网络的部署和训练;
图10示出了根据至少一个实施例的示例数据中心系统;
图11A示出了根据至少一个实施例的自主车辆的示例;
图11B示出了根据至少一个实施例的图11A的自主车辆的相机位置和视野的示例;
图11C是示出根据至少一个实施例的图11A的自主车辆的示例系统架构的框图;
图11D是示出根据至少一个实施例的图11A的用于基于云的服务器与自主车辆之间的通信的系统的图;
图12是示出根据至少一个实施例的计算机系统的框图;
图13是示出根据至少一个实施例的计算机系统的框图;
图14示出了根据至少一个实施例的计算机系统;
图15示出了根据至少一个实施例的计算机系统;
图16A示出了根据至少一个实施例的计算机系统;
图16B示出了根据至少一个实施例的计算机系统;
图16C示出了根据至少一个实施例的计算机系统;
图16D示出了根据至少一个实施例的计算机系统;
图16E和图16F示出了根据至少一个实施例的共享编程模型;
图17示出了根据至少一个实施例的示例集成电路和相关图形处理器;
图18A-图18B示出了根据至少一个实施例的示例性集成电路和相关联的图形处理器;
图19A-图19B示出了根据至少一个实施例的附加的示例性图形处理器逻辑;
图20示出了根据至少一个实施例的计算机系统;
图21A示出了根据至少一个实施例的并行处理器;
图21B示出了根据至少一个实施例的分区单元;
图21C示出了根据至少一个实施例的处理集群;
图21D示出了根据至少一个实施例的图形多处理器;
图22示出了根据至少一个实施例的多图形处理单元(CPU)系统;
图23示出了根据至少一个实施例的图形处理器;
图24是说明根据至少一个实施例的用于处理器的处理器微架构的框图;
图25示出了根据至少一个实施例的深度学习应用处理器;
图26是示出根据至少一个实施例的示例神经形态处理器的框图;
图27示出了根据一个或更多个实施例的图形处理器的至少部分;
图28示出了根据一个或更多个实施例的图形处理器的至少部分;
图29示出了根据一个或更多个实施例的图形处理器的至少部分;
图30示是根据至少一个实施例的图形处理器的图形处理引擎3710的框图;
图31是根据至少一个实施例的图形处理器核心的至少部分的框图;
图32A和图32B示出了根据至少一个实施例的包括图形处理器核心的处理元件的阵列的线程执行逻辑;
图33示出了根据至少一个实施例的并行处理单元(“PPU”);
图34示出了根据至少一个实施例的通用处理集群(“GPC”);
图35示出了根据至少一个实施例的并行处理单元(“PPU”)的内存分区单元;和
图36示出了根据至少一个实施例的流式多处理器;
图37是根据至少一个实施例的用于高级计算管线的示例数据流程图;
图38是根据至少一个实施例的用于在高级计算管线中训练、调整、实例化和部署机器学习模型的示例系统的系统图;
图39包括根据至少一个实施例的用于处理成像数据的高级计算管线的示例说明;
图40A包括根据至少一个实施例的支持超声设备的虚拟仪器的示例数据流图示;
图40B包括根据至少一个实施例的支持CT扫描仪的虚拟仪器的示例数据流程图;
图41A示出了根据至少一个实施例的用于训练机器学习模型的过程的数据流程图;和
图41B是根据至少一个实施例的,利用预训练的注释模型来增强注释工具的客户端-服务器架构的示例说明。
具体实施方式
在至少一个实施例中,本文描述的技术演示了一种机器人控制算法,该算法将基于模型的方法(“MBM”)的优势与无模型方法(“MFM”)的优势相结合。在至少一个实施例中,MBM被利用来在自由空间环境中提供有效的移动。例如,在至少一个实施例中,MBM被用于在容易避免与环境或人类的碰撞的空间中操作机器人。在至少一个实施例中,MBM与MFM结合使用,MFM增加了使用宽松定义的目标从环境中学习的能力。在至少一个实施例中,可以预测姿势不确定性的感知系统被用于帮助系统融合MBM和MFM。
诸如深度强化学习(“RL”)之类的技术允许机器人从原始感觉数据中学习并采取行动。例如,RL方法可以成功地应用于接触丰富的操作任务,例如对象的插入、推动和抓取。但是,在某些情况下,RL方法采样效率低下,需要与环境进行多次训练交互才能在现实世界中应用。为了减轻这种限制,各种实施例可以仔细地调整密集形状的奖励,这常常需要对世界状况(例如目标位置)有明确了解。另一方面,给定世界的细化模型和当前状态,可以计划、设计或搜索许多算法以用于完成任务的策略。这种基于模型(MB)的策略可用于许多操纵任务,例如销钉插入,抓握和伸手。但是,在某些示例中,MB策略可能会因模型偏差和状态估计误差而受损,并且经常达到较低的渐近性能。
本文所述的至少一个实施例结合了来自基于模型的策略的样本效率,并利用强化学习策略克服了动态和感知模型中的错误,该策略关闭了原始感觉数据的循环。至少一个实施例利用了基于模型的方法的效率来在不可能与环境和人类碰撞和接触的自由空间中移动。至少一个实施例使用RL方法的功能来从代理程序与环境的交互以及宽松定义的目标中学习。为了在MBM和RL之间切换,各种示例引入了一种感知系统,该系统可以预测姿势不确定性,以帮助系统融合这两种策略。在至少一个实施例中,利用MB策略来初始化任务,在该策略中,任务将机器人移动到感兴趣对象的不确定性范围内,例如,在其中插入钉的盒子中。在至少一个实施例中,当系统到达不确定性区域时,它切换到RL策略以完成任务。在学习时,我们利用RL的信息来减少感知系统的不确定性。至少一个实施例有效地使用不确定性来混合MB策略和RL策略以完成复杂的任务,这在单独使用这两种方法时将是非常具有挑战性的。
在各种实施例中,机器人方法依赖于环境的细化模型、如何执行任务的详细描述以及鲁棒的感知系统来跟踪当前状态。在一些其他实施例中,强化学习(“RL”)方法利用奖励信号来描述任务而直接根据句原始感觉输入操作。在一个实施例中,开发了一种系统,以获得能够克服传统管线中的元素的不精确,同时需要与环境的最小交互的通用方法。在至少一个实施例中,这是通过利用不确定性估计将空间划分为给定的基于模型的策略可靠的区域以及存在缺陷或定义不明确的区域来实现的。在至少一个实施例中,在这些硬区域中,直接从原始感觉输入中学习局部无模型策略。在一个实施例中,由于在基于模型的方法中使用的模型可能不确定,因此这些“硬区域”也可以称为“不确定区域”。在至少一个实施例中,该系统允许从简单和廉价的组件以及仅从任务的高级描述来更快地构造机器人系统。在至少一个实施例中,在现实世界的机器人中使用了一种称为“引导不确定-意识的策略优化”(“GUAPO”)的算法来执行紧密配合的钉子插入任务。
在至少一个实施例中,用MBM初始化任务,其中该方法在感兴趣对象(例如要插入钉子的盒子)的不确定性范围内移动机器人。在至少一个实施例中,在到达接近目标的限定区域之后,系统将控制方法切换到MFM以完成任务。在至少一个实施例中,在学习时,利用来自MFM任务完成的信息来减少感知系统的不确定性。在至少一个实施例中,系统将MBM和MFM混合以完成需要环境交互的复杂任务。在各种示例中,可以通过RL或优化来了解MBM和MFM之间的切换。
在至少一个实施例中,利用了一种简单且有效的方式来表达基于关键点的姿势估计器的姿势不确定性。在至少一个实施例中,该扩展通过在每个发现的峰周围拟合2d高斯来增强峰估计算法。在至少一个实施例中,PnP算法在n个关键点集上运行,其中每个关键点集是通过从所有2d高斯样本中采样来构造的。在至少一个实施例中,这提供了与检测算法一致的物体的n种可能的姿势,在本文描述的一些示例中将其视为同等可能性。
在至少一个实施例中,感知模块被用于检测和追踪世界的状态。在某些情况下,在这种环境中的简单的感知失败对于机器人来说可能是灾难性的,因为它的运动生成器可能依赖于它。此外,在某些情况下,经典的运动生成器在完成任务方面是僵化的和不灵活的。这可能导致无法适应不断变化的条件。例如,由经典运动生成器控制的机器人可能只能以特定方式拾取对象,并且如果抓取失败,将无法恢复。在至少一个实施例中,这些问题可能使基于这种控制算法的机器人系统不稳定并且难以扩展到新领域。为了扩大机器人技术的范围,可以如本文所述部署更鲁棒、自适应和灵活的系统。
在至少一个实施例中,机器人系统利用机器人专家的能力来对其环境进行建模。MBM可用于在无机器人空间内移动,例如路径跟随。在各种实施例中,由于模型中的限制或不精确性,当机器人必须与其环境进行交互时(例如,抓握物体、放置物体、插入物体等),使用MBM可能很困难。真实世界中的物理系统可能是复杂且随机的。在机器人模拟器中,对描述真实机器人行为的恰当参数进行建模可能是一项艰巨的任务。在各种实施例中,在常见任务中利用MBM可能既困难又复杂。此外,MBM通常依赖于不完善的感知系统。与各种复杂的物理系统混合在一起的潜在错误可能难以管理。另外,MBM可能既耗时又昂贵,因为它可能会受限于机器人专家的专业知识和独创性。
在各种实施例中,MFM具有适应和直接处理原始感觉输入的能力,该原始感觉输入可能不会遭受估计误差。在至少一个实施例中,MFM的强度源于其通过在较高级别上定义任务的能力,该能力指示做什么的奖励函数而不是通过描述任务应该如何执行的一组明确的控制动作。在至少一个实施例中,MFM不需要特定的物理建模,因为它是从与环境的交互中隐式地学习到的,这使得该方法可以部署在不同的环境中。在至少一个实施例中,MFM方法具有各种局限性,包括与环境的随机交互对于人类用户以及对于各种材料而言可能是复杂的,并且MFM有时不具有采样效率。在某些示例中,将MFM引入新环境既困难又复杂。
在至少一个实施例中,系统实现一种算法,该算法结合了来自MBM和MFM的优势。在至少一个实施例中,利用MBM在自由空间环境中移动的效率(例如,容易避免与环境或人类发生碰撞的空间)来利用MFM从其环境中学习松散定义的目标的能力。在至少一个实施例中,一种感知系统预测姿势不确定性以帮助系统融合MBM和MFM。
基于模型的方法是依赖于周围环境的物理模型以便控制机器人的控制方法。物理模型(有时简称为模型)提供了机器人环境中各种对象的位置和姿势,在某些示例中还提供了机器人本身的姿势。例如,物理模型可以是机器人及其附近物体的实体对象模型。这样的方法基于物理模型来计划运动,在各种示例中,物理模型包括对象回避和对象操纵。这样的系统通常使用诸如照相机或深度照相机之类的感知系统来定位对象,并确定模型的方向和位置或姿势。当在基于模型的方法的控制下,机器人的性能通常受到模型精度和感知系统精度的限制。基于模型的方法的替代方法是无模型方法,例如强化学习。无模型方法是不依赖于环境的物理模型进行操作的控制方法。在各种示例中,这样的系统可以直接从传感器数据进行操作,而无需使用模型。例如,无模型方法可以使用来自手持摄像机的图像数据并基于图像上的未来运动而不是显式物理模型来操纵对象。但是,无模型系统可能非常耗时且难以训练,尤其是对于复杂的任务。
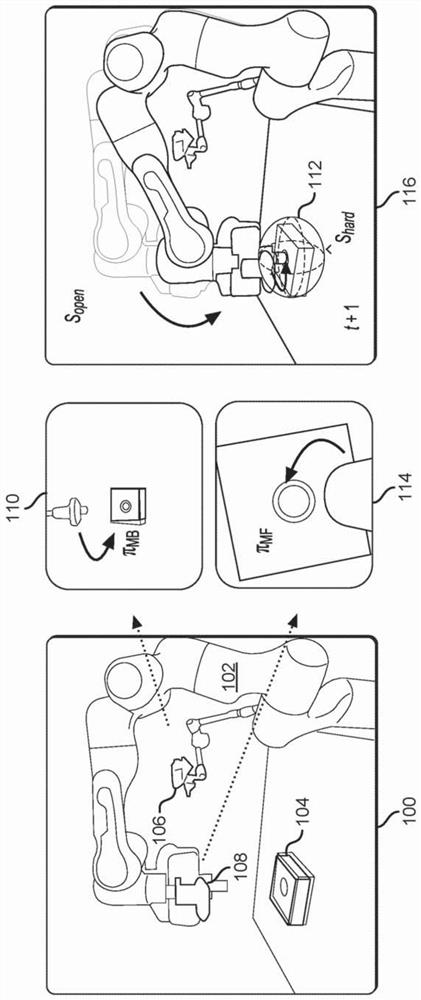
图1示出了根据至少一个实施例的指导机器人使用基于模型的方法和无模型的方法的组合来完成任务的过程。图1示出了用于钉子插入的现实世界设置的示例100。在至少一个实施例中,机器人102尝试完成将钉插入孔104中的任务。在至少一个实施例中,第一感知系统106(例如摄像机)给出相关物体的大概位置,以及基于模型的方法110在不确定性区域112内驱动系统。一旦进入不确定性区域112,就无法信任模型,并且直接根据给出足够的信息以完成任务116的第二感知系统108的原始感觉输入学习无模型策略114。在各种示例中,感知系统可以是相机、红外相机、RADAR、LIDAR、深度相机或2D或3D成像系统。
图1描绘了根据各种实施例的系统的概述,其中可以用MBM初始化任务116,其中它可以使机器人在感兴趣对象的不确定性范围内移动机器人,例如,在其中插入钉子的框。在至少一个实施例中,然后可以利用MFM来完成任务。在至少一个实施例中,在学习时,利用来自MFM任务完成的信息来减少感知系统的不确定性。在至少一个实施例中,该系统利用MBM和MFM来完成需要环境交互的复杂任务。在各种实施例中,对于诸如钉子插入的不同复杂任务,系统优于MFM或MBM经典方法。在至少一个实施例中,该系统用于表达针对基于关键点的姿势估计器的姿势不确定性。在至少一个实施例中,该系统对于现实世界的机器人上的学习方法是有效的样本。
本文描述的至少一个实施例解决了学习执行未知先验操作的问题,该操作的区域中可能仅存在估计的位置而没有准确的模型。在至少一个实施例中,该问题可以形式化为解决马尔可夫(Markov)决策过程(“MDP”),其中通过学习策略π∶
在各种实施例中,可以解决的任务包括通过与环境的相互作用达到特定的状态或配置,例如钉插入、开关系紧或抓握。在各个实施例中,这些任务由二进制奖励函数r(s)=1[s∈S
在至少一个实施例中,利用无模型方法(“MFM”)来执行任务。在某些实施例中,运行MFM效率低下且脆弱,因为可能需要学习如何在各处控制机器人,并且如果目标位置发生变化,则任务看起来可能会有所不同。在至少一个实施例中,利用具有基于模型的方法(“MBM”)的部分模型,该方法确定将代理引导到相关区域的感知和致动系统中的不确定性,从而减小了MFM策略可以在其中需要进行优化的区域,使其对绝对目标位置更加不变。在本文中,算法的各种实施例被称为引导不确定性意识策略优化(“GUAPO”)。
在至少一个实施例中,GUAPO包括一种基于感知系统不确定性估计来生成S
在许多示例中,粗略感知系统可能会更快建立,因为它们可能需要更简单的硬件(如RGB相机),并且可以创造性地使用,无需过多的调整和校准工作。如果使用这样的系统直接定位S
在至少一个实施例中,感知系统提供参数分布,并且上述概率可以通过积分计算,或者以使得集合S^
π(a|s)=(1-α(s))*π
其中π
在至少一个实施例中,S^
在至少一个实施方案中,扩展公式以考虑多种奖励。例如,如果有一个需要避免的障碍,并且它的位置不确定,则S^
在至少一个实施例中,一旦π
在至少一个实施例中,不具有像图2中的感知系统所提供的那样的全局信息,使MFM策略在S^
在至少一个实施例中,该框架使用任何新获得的经验来减少S^
在至少一个实施例中,开发了一种GUAPO算法,用于与7自由度扭矩控制机器人Franka Panda进行紧密配合的钉子插入任务,尽管在各种实施例中,可以使用任何机器人。在至少一个实施例中,利用状态估计模块并且获得不确定性估计以对S^进行定位。在至少一个实施例中,利用基于模型的策略在避免障碍的同时在S
在至少一个实施例中,深度物体姿态估计器(“DOPE”)被用作感知系统。在至少一个实施例中,DOPE使用一种简单的神经网络架构,该架构可以通过合成数据和域随机化快速进行训练。
图4示出了根据至少一个实施例的用于机器人控制系统的训练图像的示例。图4描绘了利用大量用于训练感知系统的域随机化生成的图像。在一些示例中,DOPE需要检测的对象的模型可能不是非常详细,主要由形状组成。在至少一个实施例中,没有利用深度感测来补充RGB信息。在至少一个实施例中,该算法首先使用地图上的局部峰值来找到对象长方体关键点。在一个实施例中,利用长方体的实际尺寸、相机固有特性和关键点位置,DOPE可以运行视角n点(PnP)算法来找到相机框架中的最终对象姿势。在图4所示的例子中,训练图像说明了具有各种遮挡或背景的洞盒。
图2示出了根据至少一个实施例的用于基于模型的机器人控制系统的感知模块的概述。在至少一个实施例中,图2示出了DOPE感知和不确定性以估计S
在至少一个实施例中,扩展了DOPE感知系统以获得对象姿势的不确定性估计。在至少一个实施例中,扩展通过在每个发现的峰周围拟合2D高斯来增强峰估计算法,如图2中的黑色轮廓图206所描绘。在至少一个实施例中,PnP算法在n个关键点集合上运行,其中,每个关键点集合是通过从2D高斯采样来构造的。在至少一个实施例中,这提供了与检测算法一致的对象的n个可能的姿势208、210和212,如图2所示。在至少一个实施例中,它们可以被认为具有同等可能性。
在一些示例中,可以假定对需要执行操作的对象周围的感兴趣区域S
在至少一个实施例中,在图1中描绘了完整设置,其中DOPE摄像机(640×480×3RGB图像)安装在工作区的顶部,并提供了范例图像。
在至少一个实施例中,作为基于模型的控制器,利用由黎曼运动策略(“RMP”)定义的目标吸引子将机器人移向期望的末端执行器位置。在至少一个实施例中,RMP在笛卡尔空间中处于期望的末端执行器位置
在各种实施例中,策略以20Hz发送末端执行器位置命令。在至少一个实施例中,RMP在1000Hz处计算期望的关节位置q
图3示出了根据至少一个实施例的用于无模型机器人控制系统的感知模块的概述。在至少一个实施例中,用于无模型系统的变体自动编码器用于完成任务。在至少一个实施例中,将RGB图像302和速度304提供给自动编码器306和308。
在至少一个实施例中,利用了无模型的偏离策略的RL算法,例如Soft ActorCritic。在至少一个实施例中,无模型策略直接从原始的感觉输入中起作用。在至少一个实施例中,这由关节速度和来自机器人上的腕部安装相机的图像(例如,来自罗技卡尔·蔡司Tessar的64×64×3 RGB图像)(见图1)组成。如图3所示,在至少一个实施例中,输入可以被馈送到β变量自动编码器(“VAE”),其给出状态的低维潜在空间表示。在至少一个实施例中,预先在离线收集的数据集上训练该VAE的参数。在至少一个实施例中,可以由RL算法学习的部分是2层多级感知(“MLP”)314和316,其采用由VAE给出的64维潜在表示310作为输入,并产生机器人末端执行器的3-D位置位移Δx。在至少一个实施例中,机器人动作312被提供给自动编码器,其估计下一个速度318和重构图像320。
在至少一个实施例中,在诸如Titan XP GPU之类的图形处理单元上,用12个时期的至少160,000个数据点训练VAE。在至少一个实施例中,尽管在各种实施例中可以利用任何处理单元,但是在四个P100 GPU上对DOPE进行了8小时的训练。在至少一个实施例中,对GUAPO,SAC和Residual进行了60次训练,每次有1000个步骤,在一些示例中,大约需要90分钟。
在至少一个实施例中,对于GUAPO,利用了当策略完成任务(插入钉子)时的稀疏奖励。在至少一个实施例中,策略到处都得到-1,并且当它完成任务时得到0。在至少一个实施例中,对于SAC和残差,利用负L2范数以用于目标位置μ^
在各种示例中,可以测量GUAPO算法的性能。在性能评估的一个示例中,使用了三个总体基线。首先,是不涉及任何学习的基线。在至少一个实施例中,那些可以被表示为静态的“基于模型”的方法,其不利用任何现实世界的交互来更新其策略。因此,这样的实施例可能无法从故障中恢复,并且它们可以在各种图中表示为水平虚线。第二种类型的基线是在GUAPO方法的一个或更多个实施例中使用的类似的无模型算法,但是没有利用基于模型的策略来减少其工作空间。这里,在示例中,利用Soft-Actor Critic(“SAC”)与GUAPO进行比较。最后,可以比较残差学习技术,这些方法也可以尝试将基于模型的方法与无模型的方法相结合。
在基于静态模型的基线类别中,可以考虑脚本方法的性能。在至少一个实施例中,最直接的方法可能是利用与在GUAPO方法中利用的相同的基于吸引子的控制来直接到达S^
图5示出了根据至少一个实施例的用于各种机器人控制方法的测试结果的示例。第一图表502示出了任务完成与任务成功的训练迭代次数,第二图表504示出了任务完成与训练迭代所需的步数。图5示出了将GUAPO与其他五个基线进行比较的任务结果:(1)具有完美目标估算(MBPERF-EST)的基于模型的策略,(2)具有完美目标估算(MB-RA-PERF-EST)的随机动作的基于模型的策略,(3)使用DOPE目标估计值(MB-RA-DOPE-EST)的具有随机行动的基于模型的策略,(4)无模型的Soft Actor Critic(SAC)和(5)剩余策略。在此示例中,对GUAPO、SAC和残差进行了60次训练。在至少一个实施例中,在60次发作(大约90分钟的训练时间)之后,GUAPO能够100%地插入钉子,并减少钉子插入所需的步骤数。在至少一个实施例中,当使用DOPE时,基于模型的算法(“MB”)由于感知系统中的错误而使任务失败,并且SAC和Residual仅用60次就无法完成任务。
为了提供一个预言,并证明此脚本化方法可以在理想状态估计下工作,可以考虑该策略在具有MB-PERF-EST(具有理想目标估计的基于模型的策略)和MB-RA-PERF-EST(具有随机行动的理想目标估计的基于模型的策略)的理想状态估计下的性能。MB-PERF-EST可能会钻进洞去然后向下推,而不会采取随机动作。在一些示例中,随机动作不会过度降低由相同脚本动作实现的全部性能,但是没有任何附加的随机动作。如图6所示,在某些示例中,当存在感知错误时,MB-RA-DOPE-EST可能比MB-DOPE-EST表现更好。图6示出了根据至少一个实施例的用于执行任务的测试结果的表。
在至少一个实施例中,比较了基于模型的方法,例如没有各种基于模型的组件的SAC。在某些示例中,SAC可能无法实现任何插入。在某些示例中,这是由于极低的数据机制所致。在某些示例中,RL可能需要几个数量级的附加数据。
在至少一个实施例中,还可以考虑残余学习。在至少一个实施例中,该方法在给定策略之上应用随机动作。在某些示例中,这是脚本化策略。在各种实施例中,残余学习导致各种错误。在至少一个实施例中,一种常见的故障情况是在距孔开口太远的地方施加较大的扰动,并因此终止于在孔所在的盒子的侧面上,然后反而推向盒子的侧面。在至少一个实施例中,系统仅在无模型部分已经位于感兴趣区域附近时才打开它,从而避免了这种故障情况。
在一实施例中,结果在图5和图6中示出。在至少一个实施例中,具有完美感知估计(“MB-PERF-EST”)的基于模型的策略可以胜过GUAPO,因为该策略准确地知道盒子的孔在哪里,并且可以利用手写动作来完成任务。然而,在至少一个实施例中,当DOPE被用作感知系统时,其可以具有大约2.5至3.5cm的噪声和误差,MB-DOPE-EST和MB-RA-DOPE-EST的性能急剧下降。在至少一个实施例中,因为随机动作抵消了感知误差,所以MB-RA-DOPE-EST的性能比MB-DOPE-EST好26.6%。在至少一个实施例中,残余和SAC都不能在训练时间帧内完成任务。然而,在至少一个实施例中,在60个训练时期之后,残差能够100%地到达S^
在机器人操纵的至少一个实施例中,存在各种执行任务的范例,例如基于模型的范例和无模型的范例。在至少一个实施例中,第一类方法可以依赖于对任务的精确描述,例如所有对象的精确CAD模型以及各种感知系统。在一些示例中,它可以与诸如运动计划之类的各种搜索算法一起使用。在至少一个实施例中,该方法受到实施方式的限制,并且如果感知系统具有一些噪声,则两者都可能被约束为不可恢复的故障。
在至少一个实施例中,无模型方法不需要详细描述,而是访问与环境的交互以及可能指示成功的奖励。在至少一个实施例中,这样的二进制奖励可能易于描述,但是它们可能使RL方法的采样效率极低,并且可以利用需要相当大的调整和精确的感知系统的极端形状的奖励。在至少一个实施例中,可以利用自动课程生成或演示的使用,并且可能需要与环境的大量交互。此外,在各种实施例中,如果场景中对象的位置改变或背景中存在新的干扰物,则可能需要重新训练这些方法。在至少一个实施例中,所开发的系统即使在仅使用稀疏成功奖励的情况下也是采样高效的,并且由于基于模型的组件而对这些变体具有鲁棒性。
在至少一个实施例中,在各种机器人技术和计算机视觉应用中利用对象姿态估计。在至少一个实施例中,利用回归到对象上或包围对象的长方体上的关键点。在至少一个实施例中,首先通过神经网络检测关键点,然后使用PnP来预测对象的姿势。在至少一个实施例中,通过利用随机抽样一致性投票算法来发现可以检测到关键点的区域,从而利用不确定性。在至少一个实施例中,这允许利用概率PnP,其中根据其空间分布对不同的关键点进行加权。在至少一个实施例中,矢量投票图可以被回归到在其中然后可以使用线相交来找到关键点的位置。在一些实施例中,在最终预测中不考虑姿势不确定性。
在一个实施例中,开发了GUAPO算法,其结合了基于模型的方法的泛化能力和无模型的方法的适应性。在至少一个实施例中,它可以通过仅提供对象的粗略模型和需要执行某些操作的区域的粗略描述而使能够宽松地定义要执行的任务。在至少一个实施例中,基于模型的系统可以利用高级信息和廉价状态估计系统来在关注区域周围创建漏斗。在至少一个实施例中,可以利用感知系统提供的不确定性估计来自动在基于模型的策略和可以从稀疏奖励中学习的无模型策略之间进行切换,这可以克服模型和基于模型的部分的估计的误差。在至少一个实施例中,在紧密配合的栓钉插入任务的真实世界中实现了学习。
图7示出了根据至少一个实施例的过程,作为该过程由诸如下面的图8-41中示出和描述的计算机系统以及相关联的描述所执行的结果,使该计算机系统使用如上所述的基于模型和无模型的方法的组合来指导机器人执行任务。在至少一个实施例中,该过程在框702处开始,其中计算机系统从第一感知系统获得信息。感知系统可以是相机、深度相机、LIDAR、RADAR或其他提供位置或地点信息的传感系统,例如以下所列。在至少一个实施例中,感知系统是观察机器人和周围环境的固定相机。在至少一个实施例中,在框704处,如上所述,使用诸如DOPE之类的姿势估计器处理信息,以生成机器人周围环境的物理模型。在至少一个实施例中,物理模型是机器人周围的物体、表面的2-D或3-D模型。在至少一个实施例中,物理模型包括对象的姿势和位置信息,并且在一些实施例中,包括机器人本身。机器人可以是铰接式机器人、自动驾驶车辆、取放机器或受计算机系统控制的其他机器。在至少一个实施例中,如上所述,根据第一感知系统提供的信息确定706不确定性。在至少一个实施例中,不确定性是可能的物体和/或机器人姿势的分布。在至少一个实施例中,不确定性基于相机分辨率和第一感知系统的误差。
在至少一个实施例中,在框708处,计算机系统使用物理模型来实现基于模型的方法,例如上述的MBM,以将机器人移动到空间区域,在一些示例中,该空间区域是根据不确定性确定的。在至少一个实施例中,空间区域是计算机系统确定模型不再足够精确以允许机器人完成任务的区域。在至少一个实施例中,在判定框710处,计算机系统基于不确定性来确定机器人是否在该区域中。例如,使用不确定性,系统可以确定机器人在该区域内的可能性大于阈值或百分比。如果机器人不在该区域中,则执行返回到框702,但是如果机器人被确定为处于所要求的确定性区域内,则执行前进到框712处。
在至少一个实施例中,在框712处,计算机系统从第二感知系统获得信息。在至少一个实施例中,第二感知系统是安装在机器人操纵器上的内置摄像机,或者是安装在机器人的手腕上的摄像机。在至少一个实施例中,在框714处,计算机系统将来自第二感知系统的信息提供给无模型方法,该方法根据该信息生成对机器人的控制指令,而不依赖于物理模型。在至少一个实施例中,在框716处,使用使用无模型方法生成的控制指令来移动机器人。在至少一个实施例中,在判定框718处,计算机系统确定是否通过无模型方法完成了正在执行的任务。如果不是,则执行返回到框712。在至少一个实施例中,如果任务完成,则执行前进到框720,并且该过程结束。在各种示例中,任务可以是如上所述将钉子插入孔中,或者如下所述进行自动驾驶车辆的操作。
推理和训练逻辑
图8A示出了用于执行与一个或更多个实施例相关联的推理和/或训练操作的推理和/或训练逻辑815。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。
在至少一个实施例中,推理和/或训练逻辑815可以包括但不限于代码和/或数据存储801,用于存储前向和/或输出权重和/或输入/输出数据、和/或其他参数以配置在一个或更多个实施例的中被训练和/或被用于推理的神经网络的神经元或层。在至少一个实施例中,训练逻辑815可以包括或耦合到代码和/或数据存储器801以存储图形代码或其他软件以控制定时和/或顺序,其中权重和/或其他参数信息将被加载以配置包括整数和/或浮点单元(统称为算术逻辑单元(ALU))的逻辑。在至少一个实施例中,诸如图形代码的代码基于代码所对应的神经网络的架构将权重或其他参数信息加载到处理器ALU中。在至少一个实施例中,数据存储801存储在使用一个或更多个实施例的方面进行推理和/或训练期间输入/输出数据和/或权重参数的正向传播期间与一个或更多个实施例结合训练或使用的神经网络的每一层的权重参数和/或输入/输出数据。在至少一个实施例中,代码和/或数据存储801的任何部分可以与其他片上或片外数据存储(包括处理器的L1、L2或L3高速缓存或系统存储器)一起被包括。
在至少一个实施例中,代码和/或数据存储801的任何部分可以在一个或更多个处理器或其他硬件逻辑设备或电路的内部或外部。在至少一个实施例中,代码和/或数据存储801可以是高速缓存存储器、动态随机可寻址存储器(“DRAM”)、静态随机可寻址存储器(“SRAM”)、非易失性存储器(例如闪存)或其他存储装置。在至少一个实施例中,代码和/或数据存储801是处理器的内部还是外部的选择,例如,包括DRAM、SRAM、闪存还是由其他类型的存储器,取决于片上可用存储、进行训练和/或推理功能的延迟要求、在推理和/或训练神经网络中使用的数据的批量大小或这些因素的某种组合。
在至少一个实施例中,推理和/或训练逻辑815可以包括但不限于代码和/或数据存储805,以存储与在一个或更多个实施例的方面中被训练和/或用于推理的神经网络或神经网络的层相对应的向后和/或输出权重和/或输入/输出数据。在至少一个实施例中,代码和/或数据存储805存储在使用一个或更多个实施例的方面的训练和/或推理期间在向后传播输入/输出数据和/或权重参数期间,与一个或更多个实施例一起训练或结合使用的神经网络的每一层的权重参数和/或输入/输出数据。在至少一个实施例中,训练逻辑815可以包括或耦合到代码和/或数据存储器805以存储图形代码或其他软件以控制定时和/或顺序,在该定时和/或顺序中加载权重和/或其他参数信息以配置包括整数和/或浮点单元(统称为算术逻辑单元(ALU))的逻辑。
在至少一个实施例中,诸如图形代码的代码基于代码所对应的神经网络的架构将权重或其他参数信息加载到处理器ALU中。在至少一个实施例中,代码和/或数据存储805的任何部分可以与其他片上或片外数据存储包括在一起,包括处理器的L1、L2或L3高速缓存或系统存储器。在至少一个实施例中,代码和/或数据存储805的任何部分可以在一个或更多个处理器或其他硬件逻辑设备或电路的内部或外部。在至少一个实施例中,代码和/或数据存储805可以是高速缓存存储器、DRAM、SRAM、非易失性存储器(例如,闪存)或其他存储器。在至少一个实施例中,代码和/或数据存储805是处理器的内部还是外部的选择,例如,是由DRAM、SRAM、闪存存储器还是其他存储类型组成的,取决于片上可用存储、进行训练和/或推理功能的延迟要求、在推理和/或训练神经网络中使用的数据的批量大小或这些因素的某种组合。
在至少一个实施例中,代码和/或数据存储801和代码和/或数据存储805可以是分开的存储结构。在至少一个实施例中,代码和/或数据存储801和代码和/或数据存储805可以是相同的存储结构。在至少一个实施例中,代码和/或数据存储801和代码和/或数据存储805可以是部分结合和部分分离的。在至少一个实施例中,代码和/或数据存储801和代码和/或数据存储805的任何部分可以与其他片上或片外数据存储包括在一起,包括处理器的L1、L2或L3高速缓存或系统存储器。
在至少一个实施例中,推理和/或训练逻辑815可以包括但不限于包括整数和/或浮点单元的一个或更多个算术逻辑单元(“ALU”)810,以至少部分地基于训练和/或推理代码(例如图形代码)或由其指示执行逻辑和/或算术操作,其结果可以产生存储在激活存储820中的作为储在代码和/或数据存储801和/或代码和/或数据存储805中输入/输出和/或权重参数数据功能的激活(例如,来自神经网络内的层或神经元的输出值)。在至少一个实施例中,存储在激活存储820中的激活是根据由ALU 810响应于执行指令或其他代码执行的线性代数和/或基于矩阵的数学生成的,其中将存储在代码和/或数据存储805的权重值和/或数据存储801与其他值(例如偏置值、梯度信息、动量值或其他参数或超参数)一起用作操作数,这些值中的任意或者全部可以存储在代码和/或数据存储805或代码和/或数据存储801或其他片上或片下存储器。
在至少一个实施例中,一个或更多个处理器或其他硬件逻辑设备或电路中包括一个或更多个ALU 810,而在另一实施例中,一个或更多个ALU810可以在使用它们的处理器或其他硬件逻辑设备或电路(例如,协处理器)的外部。在至少一个实施例中,ALU 810可以被包括在处理器的执行单元之内,或者以其他方式被包括在处理器的执行单元可以访问的一套ALU中,该套ALU可以在同一处理器内或者分布在不同类型的不同处理器之间(例如,中央处理器、图形处理单元、固定功能单元等)。在至少一个实施例中,代码和/或数据存储801,代码和/或数据存储805和激活存储820可以在共享同一处理器或其他硬件逻辑装置或电路,而在另一实施例中,它们可以在不同的处理器或其他硬件逻辑装置或电路中,或相同和不同处理器或其他硬件逻辑设备或电路的某种组合中。在至少一个实施例中,激活存储820中的任何部分可以与其他片上或片外数据存储包括在一起,包括处理器的L1、L2或L3高速缓存或系统存储器。此外,推理和/或训练代码可以与处理器或其他硬件逻辑或电路可访问的其他代码一起存储,并可以使用处理器的提取、解码、调度、执行、退出和/或其他逻辑电路来提取和/或处理。
在至少一个实施例中,激活存储820可以是高速缓存存储器、DRAM、SRAM、非易失性存储器(例如,闪存)或其他存储器。在至少一个实施例中,激活存储820可以完全或部分在一个或更多个处理器或其他逻辑电路之内或之外。在至少一个实施例中,激活存储820是处理器的内部还是外部的选择,例如,或者是由DRAM、SRAM、闪存存储器或某种其他存储类型组成的,取决于片上可用存储、进行训练和/或推理功能的延迟要求、在推理和/或训练神经网络中使用的数据的批量大小或这些因素的某种组合。
在至少一个实施例中,图8A中所示的推理和/或训练逻辑815可以与专用集成电路(“ASIC”)(例如来自谷歌的
图8B示出了根据至少一个实施例的各种推理和/或训练逻辑815。在至少一个实施例中,推论和/或训练逻辑815可以包括但不限于硬件逻辑,其中计算资源是专用的或以其他方式专用地与对应于神经网络内的一层或更多层神经元的权重值或其他信息结合使用。在至少一个实施例中,图8B中所示的推理和/或训练逻辑815可以与专用集成电路(ASIC)(例如Google的
在至少一个实施例中,代码和/或数据存储801和805以及相应的计算硬件802和806中的每一个分别对应于神经网络的不同层,从而提供产生来自数代码和/或数据存储801和计算硬件802的一个“存储/计算对801/802”的激活作为对下一个代码和/或数据存储805和计算硬件806的“存储/计算对805/806”的输入,以镜像神经网络的概念组织。在至少一个实施例中,每个存储/计算对801/802和805/806可以对应于一个以上的神经网络层。在至少一个实施例中,在推理和/或训练逻辑815中可以包括在存储计算对801/802和805/806之后或与之并行的附加存储/计算对(未示出)。
神经网络训练和部署
图9示出了根据至少一个实施例的深度神经网络的训练和部署。在至少一个实施例中,使用训练数据集902来训练未训练的神经网络906。在至少一个实施例中,训练框架904是PyTorch框架,而在其他实施例中,训练框架904是Tensorflow、Boost、Caffe、Microsoft Cognitive Toolkit/CNTK、MXNet、Chainer、Keras、Deeplearning4j或其他培训框架。在至少一个实施例中,训练框架904训练未训练的神经网络906,并使它能够使用本文所述的处理资源来训练,以生成训练后的神经网络908。在至少一个实施例中,权重可以被随机选择或通过使用深度信念网络。在至少一个实施例中,可以以有监督、部分有监督或无监督的方式执行训练。
在至少一个实施例中,使用监督学习来训练未训练的神经网络906,其中训练数据集902包括与输入的期望输出配对的输入,或者其中训练数据集902包括具有已知输出的输入,以及神经网络的输出是手动分级的。在至少一个实施例中,未训练的神经网络906以监督的方式被训练,以处理来自训练数据集902的输入,并将结果输出与一组期望或预期的输出进行比较。在至少一个实施例中,然后通过未训练的神经网络906将错误传播回去。在至少一个实施例中,训练框架904调整控制未训练的神经网络906的权重。在至少一个实施例中,训练框架904包括用于监视未经训练的神经网络906正朝着诸如训练后的神经网络908之类的模型收敛的状况的工具,该模型适于基于诸如新数据912之类的已知输入数据来生成诸如结果914之类的正确答案。在至少一个实施例中,训练框架904在调整权重的同时反复训练未训练的神经网络906,以使用损失函数和调整算法(例如随机梯度下降)来完善未训练的神经网络906的输出。在至少一个实施例中,训练框架904训练未训练的神经网络906,直到未训练的神经网络906达到期望的精度为止。在至少一个实施例中,然后可以部署经循环的神经网络908以实施任何数量的机器学习操作。
在至少一个实施例中,未训练的神经网络906是使用非监督学习来训练的,其中,未训练的神经网络906尝试使用未标记的数据来训练自己。在至少一个实施例中,无监督学习训练数据集902将包括输入数据,而没有任何相关联的输出数据或“地面实况(groundtruth)”数据。在至少一个实施例中,未经训练的神经网络906可以学习训练数据集902内的分组,并且可以确定各个输入如何与未经训练的数据集902相关。在至少一个实施例中,可以使用未经监督的训练来生成自组织图,在经训练的神经网络908中能够执行对减小新数据集912的维数有用的操作。在至少一个实施例中,无监督训练也可用于执行异常检测,其允许识别新数据集912中的数据点,偏离新数据集912的正常模式。
在至少一个实施例中,可以使用半监督学习,这是一种技术,其中训练数据集902包括标记数据和未标记数据的混合。在至少一个实施例中,训练框架904可以用于执行增量学习,诸如通过转移的学习技术。在至少一个实施例中,增量学习使受过训练的神经网络908能够适应新数据集912,而不会忘记在初始训练期间注入到受过训练的神经网络908中的知识。
数据中心
图10示出了示例数据中心1000,其中可以使用至少一个实施例。在至少一个实施例中,数据中心1000包括数据中心基础设施层1010、框架层1020、软件层1030和应用层1040。
在至少一个实施例中,如图10所示,数据中心基础设施层1010可以包括资源协调器1012、分组的计算资源1014和节点计算资源(“节点C.R.”)1016(1)-1016(N),其中“N”代表正整数)其是与在其他图像中使用的不同的整数“N”)。在至少一个实施例中,节点C.R.1016(1)-1016(N)可以包括但不限于任何数量的中央处理单元(“CPU”)或其他处理器(包括加速器、现场可编程门阵列(FPGA)、图形处理器等)、内存存储设备1018(1)-1018(N)(例如,动态只读存储器、固态存储器或磁盘驱动器)、网络输入/输出(“NW I/O”)设备、网络交换机、虚拟机(“VM”),电源模块和冷却模块等。在至少一个实施例中,节点C.R.1016(1)-1016(N)中的一个或更多个节点C.R.可以是具有上述计算资源的一个或更多个的服务器。
在至少一个实施例中,分组的计算资源1014可以包括容纳在一个或更多个机架(未示出)中的节点C.R.的单独分组,或者容纳在各个地理位置(也未示出)的数据中心中的许多机架的单独分组。在至少一个实施例中,分组的计算资源1014内的节点C.R.的单独分组可以包括可以配置成或分配为支持一个或更多个工作负载的分组的计算、网络、存储器或存储资源。在至少一个实施例中,可以将包括CPU或处理器的几个节点C.R.分组在一个或更多个机架内,以提供计算资源来支持一个或更多个工作负载。在至少一个实施例中,一个或更多个机架还可以包括任何数量的电源模块、冷却模块和网络交换机的任意组合。
在至少一个实施例中,资源协调器1012可以配置成或以其他防水工会控制一个或更多个节点C.R.1016(1)-1016(N)和/或分组的计算资源1014。在至少一个实施例中,资源协调器1012可以包括用于数据中心1000的软件设计基础设施(“SDI”)管理实体。在至少一个实施例中,资源编排器可以包括硬件、软件或其某种组合。
在至少一个实施例中,如图10所示,框架层1020包括作业调度器1022、配置管理器1024、资源管理器1026和分布式文件系统1028。在至少一个实施例中,框架层1020可以包括用于支持软件层1030的软件1032和/或应用程序层1040的一个或更多个应用程序1042的框架。在至少一个实施例中,软件1032或应用程序1042可分别包括基于Web的服务软件或应用程序,例如由Amazon Web Services,Google Cloud和Microsoft Azure提供的服务或应用程序。在至少一个实施例中,框架层1020可以是但不限于一种免费和开放源软件网络应用框架,例如可以利用分布式文件系统1028用于大型扩展数据处理(例如“大数据”)的ApacheSpark TM(以下称为“Spark”)。在至少一个实施例中,作业调度器1032可以包括Spark驱动器,以促进对数据中心1000的各个层所支持的工作负荷的调度。在至少一个实施例中,配置管理器1024可以能够配置不同的层(例如包括Spark的软件层1030和框架层1020)和用于支持大规模数据处理的分布式文件系统1028。在至少一个实施例中,资源管理器1026能够管理映射到或分配用于支持分布式文件系统1028和作业调度器1022的集群或分组计算资源。在至少一个实施例中,集群或分组计算资源可以包括在数据中心基础设施层1010处的分组计算资源1014。在至少一个实施例中,资源管理器1026可以与资源协调器1012协调以管理这些映射或分配的计算资源。
在至少一个实施例中,包括在软件层1030中的软件1032可以包括由节点C.R.1016(1)-1016(N)、分组计算资源1014和/或框架层1020的分布式文件系统1028的至少一部分使用的软件。在至少一个实施例中,一种或更多种类型的软件可以包括但不限于Internet网页搜索软件、电子邮件病毒扫描软件、数据库软件和流视频内容软件。
在至少一个实施例中,应用层1040中包括的应用程序1042可以包括由节点C.R.1016(1)-1016(N)的至少一部分、分组的计算资源1714和/或框架层1020的分布式文件系统1028使用的一种或更多种类型的应用程序。在至少一个实施例中,一种或更多种类型的应用程序可以包括但不限于任何数量的基因组学应用程序,认知计算和机器学习应用程序,包括训练或推理软件,机器学习框架软件(例如PyTorch、TensorFlow、Caffe等)或其他与一个或更多个实施例结合使用的机器学习应用程序。
在至少一个实施例中,配置管理器1024、资源管理器1026和资源协调器1012中的任何一个可以基于以任何技术上可行的方式获取的任何数量和类型的数据来实现任何数量和类型的自我修改动作。在至少一个实施例中,自我修改动作可以减轻数据中心1000的数据中心操作员做出可能不好的配置决定并且可以避免数据中心的未充分利用和/或执行差的部分。
在至少一个实施例中,数据中心1000可以包括工具、服务、软件或其他资源,以根据本文所述的一个或更多个实施例来训练一个或更多个机器学习模型或者使用一个或更多个机器学习模型来预测或推理信息。例如,在至少一个实施例中,可以通过使用上文关于数据中心1000描述的软件和计算资源,根据神经网络架构通过计算权重参数来训练机器学习模型。在至少一个实施例中,通过使用通过本文所述的一种或更多种训练技术计算出的权重参数,可以使用上面与关于数据中心1000所描述的资源,使用对应于一个或更多个神经网络的经训练的机器学习模型来推理或预测信息。
在至少一个实施例中,数据中心可以使用CPU、专用集成电路(ASIC)、GPU、FPGA或其他硬件来使用上述资源来执行训练和/或推理。此外,上述的一个或更多个软件和/或硬件资源可以配置成一种服务,以允许用户训练或执行信息推理,例如图像识别、语音识别或其他人工智能服务。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815可以在系统图10中使用,至少部分地基于使用神经网络训练操作、神经网络功能和/或架构或本文所述的神经网络用例计算出的权重参数来推理或预测操作。
在至少一个实施例中,如上所述的计算机系统可以用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的计算机系统可以包括存储可执行指令的存储器,该可执行指令由于由计算机系统的处理器执行而导致使计算机系统实现如本文所述的基于模型和无模型的控制系统。
自主车辆
图11A示出了根据至少一个实施例的自主车辆1100的示例。在至少一个实施例中,自主车辆1100(在本文中可替代地称为“车辆1100”)可以是但不限于客运车辆,例如汽车、卡车、公共汽车和/或可容纳一个或更多个乘客的另一种类型的车辆。在至少一个实施例中,车辆1100可以是用于拖运货物的半牵引车-拖车。在至少一个实施例中,车辆1100可以是飞机、机器人车辆或其他类型的车辆。
可以根据由美国运输部下属的国家公路交通安全管理局(“NHTSA”)和汽车工程师学会(“SAE”)“与用于道路机动车辆的驾驶自动化系统有关的术语(Taxonomy andDefinitions for Terms Related to Driving Automation Systems for On-Road MotorVehicles)”(例如,于2018年6月15日发布的标准号J3016-201806,于2016年9月30日发布的标准号J3016-201609,以及该版本的以前和将来的版本此标准)定义的自动化级别来描述自动驾驶汽车。在一个或更多个实施例中,车辆1100可能能够根据自动驾驶级别的级别1至级别5中的一个或更多个来进行功能。例如,在至少一个实施例中,根据实施例,车辆1100可能能够进行条件自动化(等级3)、高度自动化(级别4)和/或全自动(级别5)。
在至少一个实施例中,车辆1100可以包括但不限于组件,诸如底盘、车身、车轮(例如2、4、6、8、18等)、轮胎、车轴和车辆的其他组件。在至少一个实施例中,车辆1100可以包括但不限于推进系统1150,例如内燃机、混合动力装置、全电动发动机和/或另一种推进系统类型。在至少一个实施例中,推进系统1150可以连接至车辆1100的传动系,其可以包括但不限于变速器,以使得能够对车辆1100进行推进。在至少一个实施例中,可以响应于从油门/加速器1152接收信号以控制推进系统1150。
在至少一个实施例中,当推进系统1150正在运行时(例如,当车辆行驶时),转向系统1154(其可以包括但不限于方向盘)用于使车辆1100转向(例如,沿着期望的路径或路线)。在至少一个实施例中,转向系统1154可以从转向致动器1156接收信号。在至少一个实施例中,方向盘对于全自动化(级别5)功能可以是可选的。在至少一个实施例中,制动传感器系统1146可以用于响应于从制动致动器1148和/或制动传感器接收到的信号来操作车辆制动器。
在至少一个实施例中,控制器1136可以包括但不限于一个或更多个片上系统(“SoC”)(图11A中未示出)和/或图形处理单元(“GPU”)向车辆1100的一个或更多个组件和/或系统提供信号(例如,代表命令)。例如,在至少一个实施例中,控制器1136可以发送信号以通过制动致动器1148操作车辆制动,通过转向致动器1156操作转向系统1154,和/或通过节气门/加速器1152操作推进系统1150。在至少一个实施例中,控制器1136可以包括一个或更多个机载(例如,集成)计算设备,其处理传感器信号并输出操作命令(例如,表示命令的信号)以实现自动驾驶和/或协助驾驶员驾驶车辆1100。在至少一个实施例中,控制器1136可以包括用于自动驾驶功能的第一控制器,用于功能安全功能的第二控制器,用于人工智能功能(例如计算机视觉)的第三控制器,用于信息娱乐功能的第四控制器,用于紧急情况下的冗余的第五控制器和/或其他控制器。在至少一个实施例中,单个控制器可以处理上述功能中的两个或更多个,两个或更多控制器可以处理单个功能和/或其任何组合。
在至少一个实施例中,控制器1136响应于从一个或更多个传感器(例如,传感器输入)接收到的传感器数据,提供用于控制车辆1100的一个或更多个组件和/或系统的信号。在至少一个实施例中,传感器数据可以从传感器接收,传感器类型例如但不限于全球导航卫星系统(“GNSS”)传感器1158(例如,全球定位系统传感器)、RADAR传感器1160、超声波传感器1162、LIDAR传感器1164、惯性测量单元(IMU)传感器1166(例如,加速度计、陀螺仪、磁罗盘、磁力计等)、麦克风1196、立体声相机1168、广角相机1170(例如鱼眼相机)、红外相机1172、环绕相机1174(例如,360度相机)、远程相机(图11A中未示出)、中程相机(图11A中未示出)、速度传感器1144(例如,用于测量车辆1100的速度)、振动传感器1142、转向传感器1140、制动传感器(例如,作为制动传感器系统1146的一部分)和/或其他传感器类型接收。
在至少一个实施例中,一个或更多个控制器1136可以从车辆1100的仪表板1132接收输入(例如,由输入数据表示)并通过人机界面(“HMI”)显示器1134、声音信号器、扬声器和/或车辆1100的其他组件提供输出(例如,由输出数据、显示数据等表示)。在至少一个实施例中,输出可包括信息,诸如车速、速度、时间、地图数据(例如,高清晰度地图(图11A中未显示)、位置数据(例如,车辆1100的位置,例如在地图上)、方向、其他车辆的位置(例如,占用光栅)、关于对象的信息以及由控制器1136感知到的对象的状态等。例如,在至少一个实施例中,HMI显示器1134可以显示关于一个或更多个对象的存在的信息(例如,路牌、警告标志、交通信号灯变更等)和/或有关驾驶操作车辆已经、正在或将要制造的信息(例如,现在改变车道、在两英里内驶出34B出口等)。
在至少一个实施例中,车辆1100进一步包括网络接口1124,其可以使用无线天线1126和/或调制解调器通过一个或更多个网络进行通信。例如,在至少一个实施例中,网络接口1124可能能够通过长期演进(“LTE”)、宽带码分多址(“WCDMA”)、通用移动电信系统(“UMTS”)、全球移动通信系统(“GSM”)、IMT-CDMA多载波(“CDMA2000”)网络等进行通信。在至少一个实施例中,无线天线1126还可以使用局域网(例如Bluetooth、Bluetooth LowEnergy(LE)、Z-Wave、ZigBee等)和/或低功耗广域网(以下简称“LPWAN”)(例如LoRaWAN、SigFox等),使环境中的对象(例如,车辆、移动设备)之间进行通信。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。下面结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815可以在系统图18A中用于至少部分地基于使用神经网络训练操作、神经网络功能和/或架构或本文所述的神经网络用例计算出的权重参数来推理或预测操作。
在至少一个实施例中,本文描述的技术可以用于控制自动驾驶车辆。例如,基于模型的控制算法可用于对车辆进行停车定位,而无模型的RL网络可用于对车辆进行停车。
图11B示出了根据至少一个实施例的图11A的自主车辆1100的相机位置和视野的示例。在至少一个实施例中,相机和各自的视野是一个示例实施例,并且不旨在进行限制。例如,在至少一个实施例中,可以包括附加的和/或替代的相机和/或相机可以位于车辆1100上的不同位置。
在至少一个实施例中,用于相机的相机类型可以包括但不限于可以适于与车辆1100的组件和/或系统一起使用的数字相机。在至少一个实施例中,一种或更多种相机可以以汽车安全完整性等级(“ASIL”)B和/或其他ASIL进行操作。在至少一个实施例中,根据实施例,相机类型可以具有任何图像捕获速率,例如60帧每秒(fps)、120fps、240fps等。在至少一个实施例中,相机可以能够使用滚动快门、全局快门、另一种类型的快门或其组合。在至少一个实施例中,滤色器阵列可以包括红色透明的透明(“RCCC”)滤色器阵列、红色透明的透明蓝色(“RCCB”)滤色器阵列、红色蓝色绿色透明(“RBGC”)滤色器阵列、Foveon X3滤色器阵列、拜耳(Bayer)传感器(“RGGB”)滤色器阵列、单色传感器滤色器阵列和/或其他类型的滤色器阵列。在至少一个实施例中,可以使用透明像素相机,例如具有RCCC、RCCB和/或RBGC滤色器阵列的相机,以努力提高光敏性。
在至少一个实施例中,一个或更多个相机可以用于执行先进驾驶员辅助系统(“ADAS”)功能(例如,作为冗余或故障安全设计的一部分)。例如,在至少一个实施例中,可以安装多功能单声道相机以提供包括车道偏离警告、交通标志辅助和智能大灯控制的功能。在至少一个实施例中,一个或更多个相机(例如,所有相机)可以同时记录并提供图像数据(例如,视频)。
在至少一个实施例中,可以将一个或更多个相机安装在安装组件中,例如定制设计的(三维(“3D”)打印的)组件,以便切出杂散光和来自在车辆1100内的反光(例如,仪表板的反射在挡风玻璃镜中反光),其可能会干扰相机的图像数据捕获能力。关于后视镜安装组件,在至少一个实施例中,后视镜组件可以是3D打印定制的,使得相机安装板匹配后视镜的形状。在至少一个实施例中,相机可以被集成到后视镜中。在至少一个实施例中,对于侧视相机,相机也可以集成在舱室的每个角落的四个支柱内。
在至少一个实施例中,具有包括车辆1100前面的环境的部分的视野的相机(例如,前向相机)可以用于环视,以及在一个或更多个控制器1136和/或控制SoC的帮助下帮助识别向前的路径和障碍物,从而提供对于生成占用网格和/或确定优选的车辆路径至关重要的信息。在至少一个实施例中,前向相机可以用于执行许多与LIDAR相似的ADAS功能,包括但不限于紧急制动、行人检测和避免碰撞。在至少一个实施例中,前向相机也可以用于ADAS功能和系统,包括但不限于车道偏离警告(“LDW”)、自动巡航控制(“ACC”)和/或其他功能(例如交通标志识别)。
在至少一个实施例中,各种相机可以用于前向配置,包括例如包括CMOS(“互补金属氧化物半导体”)彩色成像器的单目相机平台。在至少一个实施例中,广角相机1170可以用于感知从外围进入的对象(例如,行人、过马路或自行车)。尽管在图11B中仅示出了一个广角相机1170,但是,在其他实施例中,车辆1100上可以有任何数量(包括零)的广角相机1170。在至少一个实施例中,任何数量的远程相机1198(例如,远程立体相机对)可用于基于深度的对象检测,尤其是对于尚未训练神经网络的对象。在至少一个实施例中,远程相机1198也可以用于对象检测和分类以及基本对象追踪。
在至少一个实施例中,任何数量的立体声相机1168也可以包括在前向配置中。在至少一个实施例中,一个或更多个立体声相机1168可以包括集成控制单元,该集成控制单元包括可缩放处理单元,该可缩放处理单元可以提供可编程逻辑(“FPGA”)和具有单个芯片上集成的控制器局域网(“CAN”)或以太网接口的多核心微处理器。在至少一个实施例中,这样的单元可以用于生成车辆1100的环境的3D地图,包括对图像中所有点的距离估计。在至少一个实施例中,一个或更多个立体相机1168可以包括但不限于紧凑型立体视觉传感器,其可以包括但不限于两个相机镜头(左右分别一个)和一个图像处理芯片,其可以测量从车辆1100到目标对象的距离并使用所生成的信息(例如,元数据)来激活自主紧急制动和车道偏离警告功能。在至少一个实施例中,除了本文所述的那些之外,还可以使用其他类型的立体相机1168。
在至少一个实施例中,具有包括车辆1100侧面的环境的一部分的视野的相机(例如,侧视相机)可以用于环绕查看,从而提供用于创建和更新占据网格的信息,以及产生侧面碰撞警告。例如,在至少一个实施例中,环绕相机1174(例如,如图11B所示的四个环绕相机)可以定位在车辆1100上。在至少一个实施例中,环绕相机1174可以包括但不限于,广角相机、鱼目镜头、360度相机和/或相似相机的任意数量和组合。例如,在至少一个实施例中,四个鱼目镜头相机可以位于车辆1100的前、后和侧面。在至少一个实施例中,车辆1100可以使用三个环绕相机1174(例如,左、右和后面),并且可以利用一个或更多个其他相机(例如,前向相机)作为第四个环视相机。
在至少一个实施例中,具有包括车辆1100后方的环境的一部分的视野的相机(例如,后视相机)可以用于停车辅助、环视、后方碰撞警告、以及创建和更新占用光栅。在至少一个实施例中,可以使用各种各样的相机,包括但不限于还适合作为前向相机的相机(例如,远程相机1198和/或中程相机1176、立体相机1168、红外相机1172等),如本文所述。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815可以用于图11B的系统中,以至少部分地基于使用本文所述的神经网络训练操作、神经网络功能和/或架构、或神经网络用例计算出的权重参数来推理或预测操作。
在至少一个实施例中,如本文所述的机器人控制系统可用于导航自动驾驶车辆。例如,基于模型的控制系统可以使用地图和GPS信号导航汽车,而无需模型的控制则用于在行驶时提供车道保持功能。
图11C示出了根据至少一个实施例的图11A的自主车辆1100的示例系统架构的框图。在至少一个实施例中,图11C中的车辆1100的组件、特征和系统中的每一个都示出为经由总线1102连接。在至少一个实施例中,总线1102可包括但不限于CAN数据接口(在本文中可替代地称为“CAN总线”)。在至少一个实施例中,CAN总线可以是车辆1100内部的网络,用于帮助控制车辆1100的各种特征和功能,例如制动器的致动、加速、制动、转向、雨刷等。在一个实施例中,总线1102可以配置成具有数十个甚至数百个节点,每个节点具有其自己的唯一标识符(例如,CAN ID)。在至少一个实施例中,可以读取总线1102以找到方向盘角度、地面速度、发动机每分钟转动次数(“RPM”)、按钮位置和/或其他车辆状态指示器。在至少一个实施例中,总线1102可以是符合ASIL B的CAN总线。
在至少一个实施例中,除了CAN之外或来自CAN,可使用FlexRay和/或以太网(Ethernet)。在至少一个实施例中,可以有任意数量的总线形成总线1102,其可以包括但不限于零或更多的CAN总线,零或更多的FlexRay总线,零或更多的以太网总线,和/或零或更多的使用其他协议的其他类型的总线。在至少一个实施例中,两个或更多个总线1102可以用于执行不同的功能,和/或可以用于冗余。例如,第一总线1102可以用于碰撞避免功能,并且第二总线1102可以用于致动控制。在至少一个实施例中,总线1102中的每一个可以与车辆1100的任何组件通信,并且总线1102中的两个或更多个总线可以与相应的组件通信。在至少一个实施例中,任何数量的片上系统(“SoC”)1104(如SoC1104(A)和SoC1104(B))中的每一个,控制器1136中的每一个和/或车辆内的每个计算机都可以访问相同的输入数据(例如,来自车辆1100的传感器的输入),并且可以连接到公共总线,例如CAN总线。
在至少一个实施例中,车辆1100可以包括一个或更多个控制器1136,诸如本文关于图11A所描述的那些。控制器1136可以用于多种功能。在至少一个实施例中,控制器1136可以耦合到车辆1100的各种其他组件和系统中的任何一个,并且可以用于控制车辆1100、车辆1100的人工智能、车辆1100的信息娱乐和/或其他功能。
在至少一个实施例中,车辆1100可以包括任何数量的SoC 1104。SoC在至少一个实施例中,1104中的每一个可以包括但不限于中央处理单元(“CPU”)1106、图形处理单元(“GPU”)1108、处理器1110、高速缓存1112、加速器1114、数据存储1116和/或其他未显示的组件和特征。在至少一个实施例中,SoC 1104可以用于在各种平台和系统中控制车辆1100。例如,在至少一个实施例中,SoC 1104可以与高清晰度(“HD”)地图1122在系统(例如,车辆1100的系统)中组合,该高清晰度地图1122可以经由网络接口1124从一个或更多个服务器(图11C中未示出)获得地图刷新和/或更新。
在至少一个实施例中,CPU 1106可以包括CPU集群或CPU复合体(在本文中可替代地称为“CCPLEX”)。在至少一个实施例中,CPU 1106可以包括多个核心和/或二级(“L2”)高速缓存。例如,在至少一个实施例中,CPU 1106可以在相互耦合的多处理器配置中包括八个核心。在至少一个实施例中,CPU 1106可以包括四个双核心集群,其中每个集群具有专用的L2高速缓存(例如,2兆字节MB L2高速缓存)。在至少一个实施例中,CPU 1106(例如,CCPLEX)可以配置成支持同时的集群操作,使得CPU 1106的集群的任何组合在任何给定的时间都可以是活跃的。
在至少一个实施例中,一个或更多个CPU 1106可以实现电源管理功能,这些功能包括但不限于以下特征中的一个或更多个:空闲时可以自动对各个硬件模块进行时钟门控以节省动态功率;当核心由于执行等待中断(“WFI”)/事件等待(“WFE”)指令而未主动执行指令时,可以对每个核心时钟进行门控;每个核心都可以独立供电;当所有核心都被时钟门控或功率门控时,每个核心集群可以被独立地时钟门控;和/或当所有核心都被功率门控时,每个核心集群可以被独立地功率门控。在至少一个实施例中,CPU 1106可以进一步实现用于管理功率状态的增强算法,其中指定了允许的功率状态和预期的唤醒时间,并且硬件/微码确定了针对核心、集群和CCPLEX输入哪一最佳功率状态。在至少一个实施例中,处理核心可以在软件中支持简化的功率状态输入序列,其中工作被分担给微码。
在至少一个实施例中,GPU 1108可以包括集成的GPU(在本文中或者称为“iGPU”)。在至少一个实施例中,GPU 1108可以是可编程的,并且对于并行工作负载可以是有效的。在至少一个实施例中,GPU 1108可以使用增强的张量指令集。在至少一个实施例中,GPU 1108可以包括一个或更多个流式微处理器,其中每个流式微处理器可以包括一级(“L1”)高速缓存(例如,具有至少96KB的存储容量的L1高速缓存),以及两个或更多个流式微处理器可以共享L2高速缓存(例如,具有512KB存储容量的L2高速缓存)。在至少一个实施例中,GPU1108可以包括至少八个流式微处理器。在至少一个实施例中,GPU 1108可以使用计算应用程序编程接口(API)。在至少一个实施例中,GPU 1108可以使用一个或更多个并行计算平台和/或编程模型(例如,NVIDIA的CUDA模型)。
在至少一个实施例中,一个或更多个GPU 1108可以经功耗优化以在汽车和嵌入式用例中获得最佳性能。例如,在一个实施例中,可以在鳍式场效应晶体管(“FinFET”)电路上制造GPU 1108。在至少一个实施例中,每个流式微处理器可以包含多个划分为多个块的混合精度处理核心。例如但不限于,可以将64个PF32核心和32个PF64核心划分为四个处理块。在至少一个实施例中,可以为每个处理块分配16个FP32核心、8个FP64核心、16个INT32核心、两个用于深度学习矩阵算术的混合精度NVIDIA TENSOR CORE、零级(“L0”)指令缓存、线程束调度器、分派单元和/或64KB寄存器文件。在至少一个实施例中,流式微处理器可以包括独立的并行整数和浮点数据路径来提供混合了计算和寻址运算的工作量的有效执行。在至少一个实施例中,流式微处理器可以包括独立的线程调度能力,以实现更细粒度的同步和并行线程之间的协作。在至少一个实施例中,流式微处理器可以包括组合的L1数据高速缓存和共享存储器单元,以便在简化编程的同时提高性能。
在至少一个实施例中,一个或更多个GPU 1108可以包括高带宽存储器(“HBM”)和/或16GB HBM2存储器子系统,以在一些示例中提供约900GB/秒的峰值存储带宽。在至少一个实施例中,除了或替代于HBM存储器,可以使用同步图形随机存取存储器(“SGRAM”),例如图形双倍数据速率类型的五同步随机存取存储器(“GDDR5”)。
在至少一个实施例中,GPU 1108可以包括统一存储器技术。在至少一个实施例中,地址转换服务(“ATS”)支持可以用于允许GPU 1108直接访问CPU 1106页表。在至少一个实施例中,当GPU 1108中的CPU存储器管理单元(“MMU”)经历未命中时,可以将地址转换请求发送到CPU 1106。作为响应,在至少一个实施例中,CPU 1106中的两个CPU可以在其页面表中查找地址的虚拟-物理的映射并将转换传送回GPU 1108。在至少一个实施例中,统一存储器技术可以允许单个统一虚拟地址空间用于CPU 1106和GPU 1108存储器,从而简化了GPU1108的编程以及将应用程序移植到GPU 1108。
在至少一个实施例中,GPU 1108可以包括任意数量的访问计数器,其可以追踪GPU1108对其他处理器的存储器的访问频率。在至少一个实施例中,访问计数器可以帮助确保将存储器页面移动到最频繁访问页面的处理器的物理存储器中,从而提高处理器之间共享的存储器范围的效率。
在至少一个实施例中,一个或更多个SoC 1104可以包括任何数量的高速缓存1112,包括本文所述的那些。例如,在至少一个实施例中,高速缓存1112可以包括可用于CPU1106和GPU1108(例如,连接两个CPU1106和GPU 1108)的三级(“L3”)高速缓存。在至少一个实施例中,高速缓存1112可以包括回写式高速缓存,该回写式高速缓存可以例如通过使用高速缓存相干协议(例如,MEI、MESI、MSI等)来追踪线的状态。在至少一个实施例中,尽管可以使用较小的高速缓存大小,根据实施例,L3高速缓存可以包括4MB或更多。
在至少一个实施例中,一个或更多个SoC 1104可以包括一个或更多个加速器1114(例如,硬件加速器、软件加速器或其组合)。在至少一个实施例中,SoC 1104可以包括硬件加速集群,其可以包括优化的硬件加速器和/或大的片上存储器。在至少一个实施例中,大的片上存储器(例如4MB的SRAM)可以使硬件加速集群能够加速神经网络和其他计算。在至少一个实施例中,硬件加速集群可以用于补充GPU1108并且卸载GPU 1108的一些任务(例如,释放GPU 1108的更多周期以执行其他任务)。在至少一个实施例中,加速器1114可以用于足够稳定以经得起加速检验的目标工作负载(例如,感知、卷积神经网络(“CNN”)、递归神经网络(“RNN”)等)。在至少一个实施例中,CNN可以包括基于区域或区域卷积神经网络(“RCNN”)和快速RCNN(例如,如用于对象检测)或其他类型的CNN。
在至少一个实施例中,加速器1114(例如,硬件加速集群)可以包括深度学习加速器(“DLA”)。在至少一个实施例中,DLA可以包括但不限于一个或更多个Tensor处理单元(“TPU”),其可以配置成每秒提供额外的10万亿次操作用于深度学习应用程序和推理。在至少一个实施例中,TPU可以是配置成并被优化用于执行图像处理功能(例如,用于CNN、RCNN等)的加速器。在至少一个实施例中,可以针对神经网络类型和浮点运算以及推理的特定集合进一步优化DLA。在至少一个实施例中,DLA的设计可以提供比典型的通用GPU更高的每毫米性能,并且通常大大超过CPU的性能。在至少一个实施例中,TPU可执行若干功能,包括支持例如INT8、INT16和FP16数据类型以用于特征和权重的单实例卷积功能以及后处理器功能的。在至少一个实施例中,DLA可以针对各种功能中的任何功能,在处理或未处理的数据上快速且有效地执行神经网络,尤其是CNN,包括例如但不限于:用于使用来自相机传感器的数据进行对象识别和检测的CNN;用于使用来自相机传感器的数据进行距离估算的CNN;用于使用来自麦克风的数据进行紧急车辆检测以及识别和检测的CNN;用于使用来自相机传感器的数据进行人脸识别和车主识别的CNN;以及/或用于安全和/或安全相关事件的CNN。
在至少一个实施例中,DLA可以执行GPU 1108的任何功能,并且通过使用推理加速器,例如,设计者可以将DLA或GPU 1108作为目标用于任何功能。例如,在至少一个实施例中,设计者可以将CNN的处理和浮点运算集中在DLA上,并将其他功能留给GPU 1108和/或加速器1114。
在至少一个实施例中,加速器1114可以包括可编程视觉加速器(“PVA”),其在本文中可以可替代地称为计算机视觉加速器。在至少一个实施例中,PVA可以设计和配置为加速用于高级驾驶员辅助系统(“ADAS”)1138、自动驾驶、增强现实(“AR”)应用程序和/或虚拟现实(“VR”)应用程序的计算机视觉算法。在至少一个实施例中,PVA可以在性能和灵活性之间取得平衡。例如,在至少一个实施例中,每个PVA可以包括例如但不限于任何数量的精简指令集计算机(“RISC”)核心、直接存储器访问(“DMA”)和/或任意数量的向量处理器。
在至少一个实施例中,RISC核心可以与图像传感器(例如,本文描述的任意相机的图像传感器)、图像信号处理器等交互。在至少一个实施例中,每个RISC核心可以包括任意数量的存储器。在至少一个实施例中,根据实施例,RISC核心可以使用多种协议中的任意一种。在至少一个实施例中,RISC核心可以执行实时操作系统(“RTOS”)。在至少一个实施例中,可以使用一个或更多个集成电路设备、专用集成电路(“ASIC”)和/或存储设备来实现RISC核心。例如,在至少一个实施例中,RISC核心可以包括指令高速缓存和/或紧密耦合的RAM。
在至少一个实施例中,DMA可以使PVA的组件能够独立于CPU 1106访问系统存储器。在至少一个实施例中,DMA可以支持用于向PVA提供优化的任何数量的特征,包括但不限于,支持多维寻址和/或循环寻址。在至少一个实施例中,DMA可以支持多达六个或更多个寻址的维度,其可以包括但不限于块宽度、块高度、块深度、水平块步进、垂直块步进和/或深度步进。
在至少一个实施例中,向量处理器可以是可编程处理器,其可以设计为有效且灵活地执行用于计算机视觉算法并提供信号处理能力的编程。在至少一个实施例中,PVA可以包括PVA核心和两个向量处理子系统分区。在至少一个实施例中,PVA核心可以包括处理器子系统、DMA引擎(例如,两个DMA引擎)和/或其他外围设备。在至少一个实施例中,向量处理子系统可以用作PVA的主要处理引擎,并且可以包括向量处理单元(“VPU”)、指令高速缓存和/或向量存储器(例如“VMEM”)。在至少一个实施例中,VPU可以包括数字信号处理器,例如,单指令多数据(“SIMD”)、超长指令字(“VLIW”)数字信号处理器。在至少一个实施例中,SIMD和VLIW的组合可以提高吞吐量和速度。
在至少一个实施例中,每个向量处理器可以包括指令高速缓存并且可以耦合到专用存储器。结果,在至少一个实施例中,每个向量处理器可以配置为独立于其他向量处理器执行。在至少一个实施例中,特定PVA中包括的向量处理器可以配置为采用数据并行性。例如,在至少一个实施例中,单个PVA中包括的多个向量处理器可以执行共同的计算机视觉算法,除了在图像的不同区域上之外。在至少一个实施例中,包括在特定PVA中的向量处理器可以在同一图像上同时执行不同的计算机视觉算法,或者甚至在顺序图像或部分图像上执行不同的算法。在至少一个实施例中,除其他外,在硬件加速集群中可以包括任何数量的PVA,并且在每个PVA中可以包括任何数量的向量处理器。在至少一个实施例中,PVA可以包括附加的纠错码(“ECC”)存储器,以增强整体系统安全性。
在至少一个实施例中,加速器1114可以包括片上计算机视觉网络和静态随机存取存储器(“SRAM”),用于为加速器1114提供高带宽,低延迟SRAM。在至少一个实施例中,片上存储器可以包括至少4MB SRAM,其包括例如但不限于八个现场可配置的存储器块,PVA和DLA均可以对其进行访问。在至少一个实施例中,每对存储块可以包括高级外围总线(“APB”)接口、配置电路、控制器和多路复用器。在至少一个实施例中,可以使用任何类型的存储器。在至少一个实施例中,PVA和DLA可以经由为PVA和DLA提供对存储器的高速访问的主干网来访问存储器。在至少一个实施例中,主干网可以包括片上计算机视觉网络,其将PVA和DLA互连到存储器(例如,使用APB)。
在至少一个实施例中,片上计算机视觉网络可以包括接口,该接口在传输任何控制信号/地址/数据之前确定PVA和DLA均提供就绪和有效信号。在至少一个实施例中,接口可以提供用于发送控制信号/地址/数据的单独的相位和单独的信道,以及用于连续数据传输的突发型通信。在至少一个实施例中,尽管可以使用其他标准和协议,但是接口可以符合国际标准化组织(“ISO”)26262或国际电工委员会(“IEC”)61508标准。
在至少一个实施例中,一个或更多个SoC 1104可以包括实时视线追踪硬件加速器。在至少一个实施例中,实时视线追踪硬件加速器可以用于快速且有效地确定对象的位置和范围(例如,在世界模型内),以生成实时可视化模拟,以用于RADAR信号解释,用于声音传播合成和/或分析,用于SONAR系统的模拟,用于一般的波传播模拟,与用于定位和/或其他功能的LIDAR数据进行比较,和/或用于其他用途。
在至少一个实施例中,加速器1114具有用于自动驾驶的广泛用途。在至少一个实施例中,PVA可以用于ADAS和自动驾驶汽车中的关键处理阶段。在至少一个实施例中,在低功耗和低延迟下PVA的能力与需要可预测的处理的算法域良好匹配。换句话说,PVA在半密集或密集的常规计算中表现出色,即使在小型数据集上也是如此,这些数据集可能需要具有低延迟和低功耗的可预测的运行时间。在至少一个实施例中,诸如车辆1100,PVA可以被设计为运行经典的计算机视觉算法,因为它们在对象检测和整数数学运算方面是有效的。
例如,根据技术的至少一个实施例,PVA被用于执行计算机立体视觉。在至少一个实施例中,可以在一些示例中使用基于半全局匹配的算法,尽管这并不意味着限制性。在至少一个实施例中,用于3-5级自动驾驶的应用程序在运行中使用动态的估计/立体匹配(例如,从运动中恢复结构、行人识别、车道检测等)。在至少一个实施例中,PVA可以对来自两个单目相机的输入执行计算机立体视觉功能。
在至少一个实施例中,PVA可以用于执行密集的光流。例如,在至少一个实施例中,PVA可以处理原始RADAR数据(例如,使用4D快速傅立叶变换)以提供处理后的RADAR数据。在至少一个实施例中,例如,通过处理原始飞行时间数据以提供处理后的飞行时间数据,将PVA用于飞行时间深度处理。
在至少一个实施例中,DLA可用于运行任何类型的网络以增强控制和驾驶安全性,包括例如但不限于神经网络,其输出用于每个对象检测的置信度。在至少一个实施例中,可以将置信度表示或解释为概率,或者表示为提供每个检测相对于其他检测的相对“权重”。在至少一个实施例中,置信度使系统能够做出进一步的决定,即关于哪些检测应当被认为是真正的阳性检测而不是假阳性检测。在至少一个实施例中,系统可以为置信度设置阈值,并且仅将超过阈值的检测视为真阳性检测。在使用自动紧急制动(“AEB”)系统的一个实施例中,假阳性检测将导致车辆自动执行紧急制动,这显然是不希望的。在至少一个实施例中,高度自信的检测可以被认为是AEB的触发。在至少一个实施例中,DLA可以运行用于回归置信度值的神经网络。在至少一个实施例中,神经网络可以将参数的至少一些子集作为其输入,例如包围盒尺寸,获得的地平面估计(例如,从另一子系统),与从神经网络和/或其他传感器(例如,LIDAR传感器1164或RADAR传感器1160)等获得的对象的车辆1100方向、距离、3D位置估计相关的IMU传感器1166的输出。
在至少一个实施例中,一个或更多个SoC 1104可以包括数据存储器1116(例如,存储器)。在至少一个实施例中,数据存储器1116可以是SoC 1104的片上存储器,其可以存储要在GPU 1108和/或DLA上执行的神经网络。在至少一个实施例中,数据存储器1116可以具有足够大的容量以存储神经网络的多个实例以用于冗余和安全。在至少一个实施例中,数据存储器1116可以包括L2或L3高速缓存。
在至少一个实施例中,一个或更多个SoC 1104可以包括任何数量的处理器1110(例如,嵌入式处理器)。在至少一个实施例中,处理器1110可以包括启动和电源管理处理器,该启动和电源管理处理器可以是专用处理器和子系统,以处理启动电源和管理功能以及相关的安全实施。在至少一个实施例中,启动和电源管理处理器可以是SoC 1104启动序列的一部分,并且可以提供运行时电源管理服务。在至少一个实施例中,启动功率和管理处理器可以提供时钟和电压编程,辅助系统低功率状态转换,SoC 1104热和温度传感器管理和/或SoC 1104功率状态管理。在至少一个实施例中,每个温度传感器可以实现为其输出频率与温度成比例的环形振荡器,并且SoC 1104可以使用环形振荡器来检测CPU 1106,GPU1108和/或加速器1114的温度。在至少一个实施例中,如果确定温度超过阈值,则启动和电源管理处理器可以进入温度故障例程,并将SoC 1104置于较低功耗状态和/或将车辆1100置于司机的安全停车图案(例如,使车辆1100安全停车)。
在至少一个实施例中,一个或更多个处理器1110可以进一步包括一组嵌入式处理器,其可以用作音频处理引擎,音频处理引擎可以是音频子系统,其能够通过多个接口以及广泛且灵活范围的音频I/O接口为硬件提供对多通道音频的完全硬件支持。在至少一个实施例中,音频处理引擎是专用处理器核心,其具有带专用RAM的数字信号处理器。
在至少一个实施例中,处理器1110可以进一步包括始终在线的处理器引擎,该引擎可以提供必要的硬件特征以支持低功率传感器管理和唤醒用例。在至少一个实施例中,始终在线的处理器引擎上的处理器可以包括但不限于处理器核心、紧密耦合的RAM、支持外围设备(例如,定时器和中断控制器)、各种I/O控制器外围设备以及路由逻辑。
在至少一个实施例中,处理器1110可以进一步包括安全集群引擎,该安全集群引擎包括但不限于用于处理汽车应用程序的安全管理的专用处理器子系统。在至少一个实施例中,安全集群引擎可以包括但不限于两个或更多个处理器核心、紧密耦合的RAM、支持外围设备(例如,定时器、中断控制器等)和/或路由逻辑。在安全模式下,在至少一个实施例中,两个或更多个核心可以以锁步模式操作,并且可以用作具有用以检测其操作之间的任何差异的比较逻辑的单个核心。在至少一个实施例中,处理器1110可以进一步包括实时相机引擎,该实时相机引擎可以包括但不限于用于处理实时相机管理的专用处理器子系统。在至少一个实施例中,处理器1110可以进一步包括高动态范围信号处理器,该高动态范围信号处理器可以包括但不限于图像信号处理器,该图像信号处理器是作为相机处理管线的一部分的硬件引擎。
在至少一个实施例中,处理器1110可以包括视频图像合成器,该视频图像合成器可以是处理块(例如,在微处理器上实现),该处理块实现视频回放应用产生最终的视频所需要的视频后处理功能,以产生用于播放器窗口的最终图像。在至少一个实施例中,视频图像合成器可以在广角相机1170、环绕相机1174和/或舱内监控相机传感器上执行透镜畸变校正。在至少一个实施例中,优选地,由在SoC 1104的另一实例上运行的神经网络来监控舱室内监控相机传感器,该神经网络被配置为识别舱室事件并相应地做出响应。在至少一个实施例中,舱室内系统可以执行但不限于唇读以激活蜂窝服务和拨打电话、指示电子邮件、改变车辆的目的地、激活或改变车辆的信息娱乐系统和设置、或者提供语音激活的网上冲浪。在至少一个实施例中,当车辆以自主模式运行时,某些功能对于驾驶员是可用的,否则将其禁用。
在至少一个实施例中,视频图像合成器可以包括用于同时空间和时间降噪的增强的时间降噪。例如,在至少一个实施例中,在运动发生在视频中的情况下,降噪适当地对空间信息加权,从而减小由相邻帧提供的信息的权重。在至少一个实施例中,在图像或图像的一部分不包括运动的情况下,由视频图像合成器执行的时间降噪可以使用来自先前图像的信息来降低当前图像中的噪声。
在至少一个实施例中,视频图像合成器还可以配置为对输入的立体透镜帧执行立体校正。在至少一个实施例中,当使用操作系统桌面时,视频图像合成器还可以用于用户界面合成,并且不需要GPU 1108来连续渲染新表面。在至少一个实施例中,当对GPU 1108供电并使其活跃地进行3D渲染时,视频图像合成器可以被用于卸载GPU 1108以改善性能和响应性。
在至少一个实施例中,SoC 1104中的一个或更多个SoC可以进一步包括用于从相机接收视频和输入的移动工业处理器接口(“MIPI”)相机串行接口、高速接口和/或可用于相机和相关像素输入功能的视频输入块。在至少一个实施例中,SoC 1104中的一个或更多个可以进一步包括输入/输出控制器,该输入/输出控制器可以由软件控制并且可以被用于接收未提交给特定角色的I/O信号。
在至少一个实施例中,SoC 1104中的一个或更多个SoC可以进一步包括广泛的外围接口,以使得能够与外围设备、音频编码器/解码器(“编解码器”),电源管理和/或其他设备通信。在至少一个实施例中,SoC 1104可用于处理来自(例如,通过千兆位多媒体串行链路和以太网连接的)相机、传感器(例如,LIDAR传感器1164,RADAR传感器1160等,其可以通过以太网连接)的数据,来自总线1102的数据(例如,车辆1100的速度、方向盘位置等),来自GNSS传感器1158的数据(例如,通过以太网或CAN总线连接)等。在至少一个实施例中,一个或更多个SoC 1104可以进一步包括专用高性能海量存储控制器,其可以包括它们自己的DMA引擎,并且可以用于使CPU 1106摆脱常规数据管理任务。
在至少一个实施例中,SoC 1104可以是具有灵活架构的端到端平台,其跨越自动化级别3-5级,从而提供利用并有效使用计算机视觉和ADAS技术来实现多样性和冗余的综合的功能安全架构,其提供了可提供灵活、可靠的驾驶软件堆栈以及深度学习工具的平台。在至少一个实施例中,SoC 1104可以比常规系统更快、更可靠,并且甚至在能量效率和空间效率上也更高。例如,在至少一个实施例中,加速器1114当与CPU 1106、GPU 1108以及数据存储器1116结合时,可以提供用于3-5级自主车辆的快速、有效的平台。
在至少一个实施例中,计算机视觉算法可以在CPU上执行,CPU可以使用高级编程语言(例如C编程语言)配置为在多种视觉数据上执行多种处理算法。然而,在至少一个实施例中,CPU通常不能满足许多计算机视觉应用的性能要求,例如与执行时间和功耗有关的性能要求。在至少一个实施例中,许多CPU不能实时执行复杂的对象检测算法,该算法被用于车载ADAS应用和实际3-5级自主车辆中。
本文所述的实施例允许同时和/或顺序地执行多个神经网络,并且允许将结果结合在一起以实现3-5级自动驾驶功能。例如,在至少一个实施例中,在DLA或离散GPU(例如,GPU 1120)上执行的CNN可包括文本和单词识别,从而允许读取和理解交通标志,包括神经网络尚未被专门训练的标志。在至少一个实施例中,DLA还可包括神经网络,该神经网络能够识别、解释并提供符号的语义理解,并将该语义理解传递给在CPU Complex上运行的路径规划模块。
在至少一个实施例中,对于3、4或5级的驱动,可以同时运行多个神经网络。例如,在至少一个实施例中,由说明“警告:闪烁的灯指示结冰状况(Caution:flashing lightsindicate icy conditions)”的警告标志,连通电灯一起,可以由多个神经网络独立地或共同地解释。在至少一个实施例中,可以通过第一部署的神经网络(例如,已经训练的神经网络)将警告标志本身识别为交通标志,并且可以通过第二部署的神经网络来解释文本“闪烁的灯指示结冰状况(flashing lights indicate icy conditions)”,其通知车辆的路径规划软件(最好在CPU Complex上执行):当检测到闪烁的灯光时,就会存在结冰状况。在至少一个实施例中,可以通过在多个帧上操作第三部署的神经网络来识别闪烁的灯,向车辆的路径规划软件通知存在(或不存在)闪烁的灯。在至少一个实施例中,所有三个神经网络可以同时运行,例如在DLA内和/或在GPU 1108上。
在至少一个实施例中,用于面部识别和车辆所有者识别的CNN可以使用来自相机传感器的数据来识别授权驾驶员和/或车辆1100的所有者的存在。在至少一个实施例中,当所有者接近驾驶员门并打开灯时,常开传感器处理器引擎可用于解锁车辆,并且,在安全模式下,当所有者离开车辆时,可用于禁用车辆。以此方式,SoC 1104提供防止盗窃和/或劫车的保障。
在至少一个实施例中,用于紧急车辆检测和识别的CNN可以使用来自麦克风1196的数据来检测和识别紧急车辆警报器。在至少一个实施例中,SoC 1104使用CNN来对环境和城市声音进行分类,以及对视觉数据进行分类。在至少一个实施例中,训练在DLA上运行的CNN以识别紧急车辆的相对接近速度(例如,通过使用多普勒效应)。在至少一个实施例中,还可以训练CNN来识别针对车辆正在运行的区域的紧急车辆,如GNSS传感器1158所标识。在至少一个实施例中,当在欧洲运行时,CNN将寻求检测欧洲警报器,而在北美时,CNN将寻求仅识别北美警报器。在至少一个实施例中,一旦检测到紧急车辆,就可以在超声波传感器1162的辅助下使用控制程序来执行紧急车辆安全例程、减速车辆、将车辆驶至路边、停车、和/或使车辆闲置,直到紧急车辆通过。
在至少一个实施例中,车辆1100可以包括CPU 1118(例如,离散CPU或dCPU),其可以经由高速互连(例如PCIe)耦合到SoC 1104。在至少一个实施例中,CPU 1118可以包括X86处理器,例如CPU 1118可用于执行各种功能中的任何功能,例如包括在ADAS传感器和SoC1104之间潜在的仲裁不一致的结果,和/或监控控制器1136的状态和健康和/或片上信息系统(“信息SoC”)1130。
在至少一个实施例中,车辆1100可以包括GPU 1120(例如,离散GPU或dGPU),其可以经由高速互连(例如NVIDIA的NVLINK通道)耦合到SoC 1104。在至少一个实施例中,GPU1120可以提供附加的人工智能功能,例如通过执行冗余和/或不同的神经网络,并且可以至少部分地基于来自车辆1100的传感器的输入(例如,传感器数据)来用于训练和/或更新神经网络。
在至少一个实施例中,车辆1100可以进一步包括网络接口1124,其可以包括但不限于无线天线1126(例如,用于不同通信协议的一个或更多个无线天线,诸如蜂窝天线、蓝牙天线等)。在至少一个实施例中,网络接口1124可以用于使通过互联网与云服务(例如,服务器和/或其他网络设备)、其他车辆和/或计算设备(例如乘客的客户端设备)无线连接。在至少一个实施例中,为了与其他车辆通信,可以在车辆1100和另一个车辆之间建立直接链路和/或可以建立间接链路(例如,通过网络和互联网)。在至少一个实施例中,可以使用车辆到车辆的通信链路来提供直接链路。在至少一个实施例中,车辆到车辆的通信链路可以向车辆1100提供关于车辆1100附近的车辆的信息(例如,车辆1100前面、侧面和/或后面的车辆)。在至少一个实施例中,前述功能可以是车辆1100的协作自适应巡航控制功能的一部分。
在至少一个实施例中,网络接口1124可以包括SoC,其提供调制和解调功能并使控制器1136能够通过无线网络进行通信。在至少一个实施例中,网络接口1124可以包括射频前端,用于从基带到射频的上转换以及从射频到基带的下转换。在至少一个实施例中,可以以任何技术上可行的方式执行频率转换。例如,可以通过公知的过程和/或使用超外差过程来执行频率转换。在至少一个实施例中,射频前端功能可以由单独的芯片提供。在至少一个实施例中,网络接口可以包括用于通过LTE、WCDMA、UMTS、GSM、CDMA2000、蓝牙、蓝牙LE、Wi-Fi、Z-Wave、ZigBee、LoRaWAN和/或其他无线协议进行通信的无线功能。
在至少一个实施例中,车辆1100可以进一步包括数据存储器1128,其可以包括但不限于片外(例如,片外SoC 1104)存储器。在至少一个实施例中,数据存储器1128可以包括但不限于一个或更多个存储元件,包括RAM、SRAM、动态随机存取存储器(“DRAM”)、视频随机存取存储器(“VRAM”)、闪存存储器、硬盘和/或其他组件和/或可以存储至少一位数据的设备。
在至少一个实施例中,车辆1100可以进一步包括GNSS传感器1158(例如,GPS和/或辅助GPS传感器),以辅助地图绘制、感知、占用光栅生成和/或路径规划功能。在至少一个实施例中,可以使用任何数量的GNSS传感器1158,包括例如但不限于使用具有以太网的USB连接器连接到串行接口(例如RS-232)桥的GPS。
在至少一个实施例中,车辆1100可以进一步包括一个或更多个RADAR传感器1160。在至少一个实施例中,RADAR传感器1160可以由车辆1100用于远程车辆检测,即使在黑暗和/或恶劣天气条件下。在至少一个实施例中,RADAR功能安全等级可以是ASIL B。在至少一个实施例中,RADAR传感器1160可以使用CAN和/或总线1102(例如,以传输由RADAR传感器1160生成的数据)来进行控制和访问对象追踪数据,在某些示例中可以访问以太网以访问原始数据。在至少一个实施例中,可以使用各种各样的RADAR传感器类型。例如但不限于,RADAR传感器1160可适合于前、后和侧面RADAR使用。在至少一个实施例中,一个或更多个RADAR传感器1160是脉冲多普勒RADAR传感器。
在至少一个实施例中,RADAR传感器1160可以包括不同的配置,例如具有窄视野的远程、具有宽事业的近程、近程侧面覆盖等。在至少一个实施例中,远程RADAR可以用于自适应巡航控制功能。在至少一个实施例中,远程RADAR系统可以提供通过两次或更多次独立扫描(例如在250m(米)范围内)实现的宽广的视野。在至少一个实施例中,RADAR传感器1160可以帮助在静态对象和运动对象之间区分,并且可以被ADAS系统1138用于紧急制动辅助和向前碰撞警告。在至少一个实施例中,包括在远程RADAR系统中的传感器1160可以包括但不限于具有多个(例如六个或更多个)固定RADAR天线以及高速CAN和FlexRay接口的单基地多模式RADAR。在至少一个实施例中,具有六个天线、中央四个天线可以创建聚焦的波束图,该波束图设计为以较高的速度记录车辆1100的周围环境,而相邻车道的交通干扰最小。在至少一个实施例中,其他两个天线可以扩大视野,从而可以快速检测进入或离开车辆1100的车道的车辆。
在至少一个实施例中,作为示例,中程RADAR系统可包括高达160m(前)或80m(后)的范围,以及高达42度(前)或150度(后)的视野。在至少一个实施例中,短程RADAR系统可以包括但不限于设计成安装在后保险杠的两端的任意数量的RADAR传感器1160。当安装在后保险杠的两端时,在至少一个实施例中,RADAR传感器系统可以产生两个光束,该两个光束不断地监测车辆后部和附近的盲点。在至少一个实施例中,短程RADAR系统可以在ADAS系统1138中用于盲点检测和/或车道改变辅助。
在至少一个实施例中,车辆1100可以进一步包括一个或更多个超声传感器1162。在至少一个实施例中,可以定位在车辆1100的前、后和/或侧面位置的超声传感器1162可以用于停车辅助和/或创建和更新占用光栅。在至少一个实施例中,可以使用各种各样的超声传感器1162,并且可以将不同的超声传感器1162用于不同的检测范围(例如2.5m、4m)。在至少一个实施例中,超声传感器1162可以在ASIL B的功能安全等级下操作。
在至少一个实施例中,车辆1100可以包括一个或更多个LIDAR传感器1164。在至少一个实施例中,LIDAR传感器1164可以用于对象和行人检测、紧急制动、避免碰撞和/或其他功能。在至少一个实施例中,LIDAR传感器1164可以以功能安全等级ASIL B操作。在至少一个实施例中,车辆1100可以包括可以使用以太网信道的多个(例如,两个、四个、六个等)LIDAR传感器1164(例如,将数据提供给千兆以太网交换机)。
在至少一个实施例中,LIDAR传感器1164可能能够提供针对360度视野的对象及其距离的列表。在至少一个实施例中,市售的LIDAR传感器1164例如可以具有大约100m的广告范围,具有2cm-3cm的精度,并且支持100Mbps的以太网连接。在至少一个实施例中,可以使用一个或更多个非突出的LIDAR传感器1164。在这样的实施例中,可以将LIDAR传感器1164包括嵌入到车辆1100的前、后、侧面和/或拐角中的小型设备。在至少一个实施例中,LIDAR传感器1164,在这样的实施例中,即使对于低反射率的对象,也可以提供高达120度的水平视野和35度的垂直视野,并且具有200m的范围。在至少一个实施例中,可将前向LIDAR传感器1164配置为用于45度至135度之间的水平视野。
在至少一个实施例中,也可以使用LIDAR技术(诸如3D闪光LIDAR)。在至少一个实施例中,3D闪光LIDAR使用激光闪光作为传输源,以照亮车辆1100周围大约200m。在至少一个实施例中,闪光LIDAR单元包括但不限于接收器,该接收器记录激光脉冲传播时间和每个像素上的反射光,该像素又对应于从车辆1100到对象的范围。在至少一个实施例中,闪光LIDAR可以允许利用每个激光闪光来生成周围环境的高度准确且无失真的图像。在至少一个实施例中,可以部署四个闪光LIDAR传感器,在车辆1100的每一侧部署一个传感器。在至少一个实施例中,3D闪光LIDAR系统包括但不限于除了风扇(例如非扫描LIDAR设备)以外没有移动部件的固态3D视线阵列LIDAR相机。在至少一个实施例中,闪光LIDAR设备可以每帧使用5纳秒的I类(人眼安全)激光脉冲,并且可以捕获3D测距点云和共同登记的强度数据形式的反射激光。
在至少一个实施例中,车辆还可包括IMU传感器1166。在至少一个实施例中,IMU传感器1166可位于车辆1100的后轴中心,在至少一个实施例中。在至少一个实施例中,IMU传感器1166可以包括,例如但不限于,加速度计、磁力计、陀螺仪、磁罗经和/或其他传感器类型。在至少一个实施例中,例如在六轴应用中,IMU传感器1166可以包括但不限于加速度计和陀螺仪。在至少一个实施例中,例如在九轴应用中,IMU传感器1166可以包括但不限于加速度计、陀螺仪和磁力计。
在至少一个实施例中,IMU传感器1166可以实现为结合了微机电系统(“MEMS”)惯性传感器、高灵敏度GPS接收器和先进的卡尔曼滤波算法的微型高性能GPS辅助惯性导航系统(“GPS/INS”),以提供位置、速度和姿态的估算;在至少一个实施例中,IMU传感器1166可使车辆1100估算航向而无需来自磁传感器通过直接观察和关联从GPS到IMU传感器1166的速度变化来实现的输入。在至少一个实施例中,IMU传感器1166和GNSS传感器1158可以组合在单个集成单元中。
在至少一个实施例中,车辆1100可以包括放置在车辆1100内和/或周围的麦克风1196。在至少一个实施例中,此外,麦克风1196可以用于紧急车辆检测和识别。
在至少一个实施例中,车辆1100可以进一步包括任何数量的相机类型,包括立体相机1168、广角相机1170、红外相机1172、环绕相机1174、远程相机1198、中程相机1176和/或其他相机类型。在至少一个实施例中,相机可用于捕获车辆1100的整个外围周围的图像数据。在至少一个实施例中,所使用的相机的类型取决于车辆1100。在至少一个实施例中,相机类型的任何组合可以是用于在车辆1100周围提供必要覆盖范围。在至少一个实施例中,相机的数量可以根据实施例而不同。例如,在至少一个实施例中,车辆1100可以包括六个相机、七个相机、十个相机、十二个相机或其他数量的相机。在至少一个实施例中,相机可以作为示例但不限于支持千兆位多媒体串行链路(“GMSL”)和/或千兆位以太网。在至少一个实施例中,本文先前参照图11A和图11B更详细地描述了每个相机。
在至少一个实施例中,车辆1100可以进一步包括振动传感器1142。在至少一个实施例中,振动传感器1142可以测量车辆1100的部件(例如,轴)的振动。例如,在至少一个实施例中,振动的变化可以指示路面的变化。在至少一个实施例中,当使用两个或更多个振动传感器1142时,振动之间的差异可以用于确定路面的摩擦或打滑(例如,当在动力驱动轴和自由旋转轴之间存在振动差异时)。
在至少一个实施例中,车辆1100可以包括ADAS系统1138。在一些示例中,ADAS系统1138可以包括但不限于SoC。在至少一个实施例中,ADAS系统1138可以包括但不限于任何数量的自主/自适应/自动巡航控制(“ACC”)系统、协作自适应巡航控制(“CACC”)系统、前撞警告(“FCW”)系统、自动紧急制动(“AEB”)系统、车道偏离警告(“LDW”)系统、车道保持辅助(“LKA”)系统、盲区警告(“BSW”)系统、后方交叉交通警告(“RCTW”)系统、碰撞警告(“CW”)系统、车道对中(“LC”)系统和/或其他系统、特征和/或功能及其组合。
在至少一个实施例中,ACC系统可以使用RADAR传感器1160、LIDAR传感器1164和/或任何数量的相机。在至少一个实施例中,ACC系统可以包括纵向ACC系统和/或横向ACC系统。在至少一个实施例中,纵向ACC系统监控并控制到紧邻车辆1100的车辆的距离,并自动调节车辆1100的速度以保持与前方车辆的安全距离。在至少一个实施例中,横向ACC系统执行距离保持,并在需要时建议车辆1100改变车道。在至少一个实施例中,横向ACC与其他ADAS应用有关,例如LC和CW。
在至少一个实施例中,CACC系统使用来自其他车辆的信息,该信息可以经由网络接口1124和/或无线天线1126从其他车辆接收经由无线链路或者间接经由网络连接(例如,经由互联网)接收。在至少一个实施例中,直接链路可以由车辆到车辆(“V2V”)的通信链路提供,而间接链路可以由基础设施到车辆(“I2V”)的通信链路提供。通常,V2V通信提供关于紧接在前的车辆(例如,紧接在车辆1100之前并与之在同一车道上的车辆)的信息,而I2V通信提供关于更前方交通的信息。在至少一个实施例中,CACC系统可以包括I2V和V2V信息源之一或两者。在至少一个实施例中,在给定车辆1100之前的车辆的信息的情况下,CACC系统可以更可靠,并且具有改善交通流的平滑度并减少道路拥堵的潜力。
在至少一个实施例中,FCW系统被设计成警告驾驶员危险,以便驾驶员可以采取纠正措施。在至少一个实施例中,FCW系统使用前向相机和/或RADAR传感器1160,其耦合至专用处理器、DSP、FPGA和/或ASIC,其电耦合至驾驶员反馈,例如显示器、扬声器和/或振动组件。在至少一个实施例中,FCW系统可以提供警告,例如以声音、视觉警告,振动和/或快速制动脉冲的形式。
在至少一个实施例中,AEB系统检测到与另一车辆或其他对象的即将发生的向前碰撞,并且如果驾驶员在指定的时间或距离参数内未采取纠正措施,则可以自动施加制动。在至少一个实施例中,AEB系统可以使用耦合到专用处理器、DSP、FPGA和/或ASIC的前向相机和/或RADAR传感器1160。在至少一个实施例中,当AEB系统检测到危险时,AEB系统将通常首先警告驾驶员采取纠正措施以避免碰撞,并且,如果那一驾驶员没有采取纠正措施,则AEB系统可以自动施加制动器以试图防止或至少减轻预测碰撞的影响。在至少一个实施例中,AEB系统可以包括诸如动态制动器支持和/或即将发生碰撞的制动的技术。
在至少一个实施例中,当车辆1100越过车道标记时,LDW系统提供视觉、听觉和/或触觉警告,例如方向盘或座椅振动,以警告驾驶员。在至少一个实施例中,当驾驶员例如通过激活转向信号灯指示有意的车道偏离时,LDW系统不活跃。在至少一个实施例中,LDW系统可以使用耦合到专用处理器、DSP、FPGA和/或ASIC的面向正面的相机,其电耦合至诸如显示器、扬声器和/或振动组件。在至少一个实施例中,LKA系统是LDW系统的一种变型。在至少一个实施例中,如果车辆1100开始离开车道,则LKA系统提供转向输入或制动以校正车辆1100。
在至少一个实施例中,BSW系统检测并警告汽车盲区中的车辆驾驶员。在至少一个实施例中,BSW系统可以提供视觉、听觉和/或触觉警报,以指示合并或改变车道是不安全的。在至少一个实施例中,当驾驶员使用转向灯时,BSW系统可以提供附加警告。在至少一个实施例中,BSW系统可以使用耦合到专用处理器、DSP、FPGA和/或ASIC的朝后侧的相机和/或RADAR传感器1160,其电耦合到驾驶员反馈,例如显示器、扬声器和/或振动组件。
在至少一个实施例中,当在车辆1100倒车时在后相机范围之外检测到对象时,RCTW系统可以提供视觉、听觉和/或触觉通知。在至少一个实施例中,RCTW系统包括AEB系统,以确保应用车辆制动器以避免碰撞。在至少一个实施例中,RCTW系统可以使用一个或更多个面向后方的RADAR传感器1160,其耦合到专用处理器、DSP、FPGA和/或ASIC,其电耦合以提供驾驶员反馈,诸如显示器、扬声器和/或振动组件。
在至少一个实施例中,常规的ADAS系统可能易于产生误报结果,这可能使驾驶员烦恼和分散注意力,但通常不是灾难性的,因为常规的ADAS系统会警告驾驶员并允许驾驶员决定安全状况是否真正存在并采取相应行动。在至少一个实施例中,在结果冲突的情况下,车辆1100本身决定是否听从主计算机或副计算机(例如,第一控制器或第二控制器)的结果。例如,在至少一个实施例中,ADAS系统1138可以是用于将感知信息提供给备份计算机合理性模块的备用和/或辅助计算机。在至少一个实施例中,备用计算机合理性监控器可以在硬件组件上运行冗余的各种软件,以检测感知和动态驾驶任务中的故障。在至少一个实施例中,可以将来自ADAS系统1138的输出提供给监控MCU。在至少一个实施例中,如果来自主计算机的输出和辅助计算机的输出冲突,则监督MCU决定如何协调冲突以确保安全操作。
在至少一个实施例中,主计算机可以配置为向监督MCU提供置信度分数,以指示主计算机对所选结果的置信度。在至少一个实施例中,如果置信度得分超过阈值,则监督MCU可以遵循主计算机的指示,而不管辅助计算机是否提供冲突或不一致的结果。在至少一个实施例中,在置信度得分不满足阈值的情况下,并且在主计算机和辅助计算机指示不同的结果(例如,冲突)的情况下,监督MCU可以在计算机之间仲裁以确定适当的结果。
在至少一个实施例中,监督MCU可以配置为运行神经网络,该神经网络被训练和配置为至少部分地基于来自主计算机的输出和辅助计算机的输出来确定辅助计算机提供错误警报的条件。在至少一个实施例中,监督MCU中的神经网络可以学习何时可以信任辅助计算机的输出,以及何时不能信任。例如,在至少一个实施例中,当辅助计算机是基于RADAR的FCW系统时,监督MCU中的神经网络可以学习FCW系统何时识别实际上不是危险的金属对象,例如会触发警报的排水格栅或井盖。在至少一个实施例中,当辅助计算机是基于相机的LDW系统时,当存在骑自行车的人或行人并且实际上车道偏离是最安全的操作时,监督MCU中的神经网络可以学会覆盖LDW。在至少一个实施例中,监督MCU可以包括适合于运行具有相关联的存储器的神经网络的DLA或GPU中的至少一个。在至少一个实施例中,监督MCU可以包括和/或被包括为SoC 1104的组件。
在至少一个实施例中,ADAS系统1138可以包括使用传统的计算机视觉规则执行ADAS功能的辅助计算机。在至少一个实施例中,辅助计算机可以使用经典计算机视觉规则(如果-则),并且监督MCU中的神经网络的存在可以提高可靠性、安全性和性能。例如,在至少一个实施例中,多样化的实现方式和有意的非同一性使得整个系统更加容错,尤其是对于由软件(或软件-硬件接口)功能引起的故障。例如,在至少一个实施例中,如果在主计算机上运行的软件中存在软件漏洞或错误,并且在辅助计算机上运行的不相同的软件代码提供了一致的总体结果,则监督MCU可以更有把握地认为总体结果是正确,并且主计算机上的软件或硬件中的漏洞不会导致重大错误。
在至少一个实施例中,可以将ADAS系统1138的输出输入到主计算机的感知模块和/或主计算机的动态驾驶任务模块中。例如,在至少一个实施例中,如果ADAS系统1138由于正前方的对象而指示向前碰撞警告,则感知块可以在识别对象时使用该信息。在至少一个实施例中,如本文所述,辅助计算机可以具有其自己的神经网络,该神经网络经过训练从而降低了误报的风险。
在至少一个实施例中,车辆1100可以进一步包括信息娱乐SoC 1130(例如,车载信息娱乐系统(IVI))。尽管被示出和描述为SoC,但是在至少一个实施例中,信息娱乐系统1130可以不是SoC,并且可以包括但不限于两个或更多个分立组件。在至少一个实施例中,信息娱乐SoC 1130可以包括但不限于硬件和软件的组合,其可以用于提供音频(例如,音乐、个人数字助理、导航指令、新闻、广播等)、视频(例如,电视、电影、流媒体等)、电话(例如,免提通话)、网络连接(例如,LTE、WiFi等)和/或信息服务(例如,导航系统、后停车辅助、无线电数据系统、与车辆相关的信息,例如燃油水平、总覆盖距离、制动燃油水平、油位、车门打开/关闭、空气滤清器信息等)到车辆1100。例如,信息娱乐SoC1130可以包括收音机、磁盘播放器、导航系统、视频播放器、USB和蓝牙连接、汽车、车载娱乐系统、WiFi、方向盘音频控制、免提语音控制、抬头显示器(“HUD”)、HMI显示器1134、远程信息处理设备、控制面板(例如,用于控制各种组件、特征和/或系统和/或与之交互)和/或其他组件。在至少一个实施例中,信息娱乐SoC 1130可以进一步用于向车辆的用户提供信息(例如,视觉和/或听觉的),诸如来自ADAS系统1138的信息、自动驾驶信息(诸如计划的车辆操纵)、轨迹、周围环境信息(例如,交叉路口信息、车辆信息、道路信息等)和/或其他信息。
在至少一个实施例中,信息娱乐SoC 1130可以包括任何数量和类型的GPU功能。在至少一个实施例中,信息娱乐SoC 1130可以通过总线1102与车辆1100的其他设备、系统和/或组件通信。在至少一个实施例中,信息娱乐SoC 1130可以是耦合到监控MCU,使得信息娱乐系统的GPU可以在主控制器1136(例如,车辆1100的主计算机和/或备用计算机)发生故障的情况下执行一些自动驾驶功能。在至少一个实施例中,信息娱乐SoC 1130可以使车辆1100进入司机到安全停止模式,如本文所述。
在至少一个实施例中,车辆1100可以进一步包括仪表板1132(例如,数字仪表板、电子仪表板、数字仪表操纵板等)。在至少一个实施例中,仪表板1132可以包括但不限于控制器和/或超级计算机(例如,离散控制器或超级计算机)。在至少一个实施例中,仪表板1132可以包括但不限于一组仪表的任何数量和组合,例如车速表、燃料水平、油压、转速表、里程表、转弯指示器、换档位置指示器、安全带警告灯、驻车制动警告灯、发动机故障灯、辅助约束系统(例如安全气囊)信息、照明控件、安全系统控件、导航信息等。在某些示例中,信息可能是在信息娱乐SoC 1130和仪表板1132之间显示和/或共享。在至少一个实施例中,仪表板1132可以被包括作为信息娱乐SoC 1130的一部分,反之亦然。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815可以在系统图11C中使用,以至少部分地基于使用本文所述的神经网络训练操作、神经网络功能和/或架构或神经网络用例计算出的权重参数来推理或预测操作。
图11D是根据至少一个实施例的在基于云的服务器与图11A的自主车辆1100之间进行通信的系统1176的图。在至少一个实施例中,系统1176可以包括但不限于服务器1178、网络1190以及任何数量和类型的车辆,包括车辆1100。在至少一个实施例中,服务器1178可以包括但不限于,多个GPU 1184(A)-1184(H)(在本文中统称为GPU 1184)、PCIe交换机1182(A)-1182(D)(在本文中统称为PCIe开关1182),和/或CPU 1180(A)-1180(B)(在本文中统称为CPU 1180)、GPU 1184、CPU 1180和PCIe开关1182可以与高速连接线互连,例如但不限于,由NVIDIA开发的NVLink接口1188和/或PCIe连接1186。在至少一个实施例中,GPU 1184通过NVLink和/或NVSwitchSoC连接,GPU 1184和PCIe开关1182通过PCIe互连连接。在至少一个实施例中,尽管示出了八个GPU 1184、两个CPU 1180和四个PCIe开关1182,但这并不旨在进行限制。在至少一个实施例中,服务器1178中的每一个可以包括但不限于任意数量的GPU1184、CPU 1180和/或PCIe开关1182的任何组合。例如,在至少一个实施例中,服务器1178可各自包括八个、十六个、三十二个和/或更多个GPU 1184。
在至少一个实施例中,服务器1178可以通过网络1190并从车辆接收表示图像的图像数据,该图像示出了意外的或改变的道路状况,例如最近开始的道路工程。在至少一个实施例中,服务器1178可以通过网络1190并且向车辆传输神经网络1192、更新的神经网络1192和/或地图信息1194,包括但不限于关于交通和道路状况的信息。在至少一个实施例中,对地图信息1194的更新可以包括但不限于对HD地图1122的更新,例如关于建筑工地、坑洼、便道、洪水和/或其他障碍物的信息。在至少一个实施例中,神经网络1192、和/或地图信息1194可能是由从环境中的任何数量的车辆接收的数据中表示的新训练和/或经验产生的,和/或至少基于在数据中心执行的训练(例如,使用服务器1178和/或其他服务器)。
在至少一个实施例中,服务器1178可以用于至少部分地基于训练数据来训练机器学习模型(例如,神经网络)。在至少一个实施例中,训练数据可以由车辆产生,和/或可以在模拟中产生(例如,使用游戏引擎)。在至少一个实施例中,标记任何数量的训练数据(例如,在相关的神经网络受益于监督学习的情况下)和/或经历其他预处理。在至少一个实施例中,没有对任何数量的训练数据进行标记和/或预处理(例如,在相关联的神经网络不需要监督学习的情况下)。在至少一个实施例中,一旦机器学习模型被训练,机器学习模型就可以被车辆使用(例如,通过网络1190传输到车辆,和/或机器学习模型可以被服务器1178使用以远程监控车辆。
在至少一个实施例中,服务器1178可以从车辆接收数据并且将数据应用于最新的实时神经网络以用于实时智能推理。在至少一个实施例中,服务器1178可以包括由GPU1184供电的深度学习超级计算机和/或专用AI计算机,例如由NVIDIA开发的DGX和DGXStation机器。然而,在至少一个实施例中,服务器1178可以包括使用CPU供电的数据中心的深度学习基础设施。
在至少一个实施例中,服务器1178的深度学习基础结构可能能够进行快速、实时的推理,并且可以使用该能力来评估和验证车辆1100中处理器、软件和/或相关硬件的健康。例如,在至少一个实施例中,深度学习基础设施可以从车辆1100接收周期性更新,例如车辆1100在该图像序列中所定位的图像序列和/或对象(例如,通过计算机视觉和/或其他机器学习对象分类技术)。在至少一个实施例中,深度学习基础设施可以运行其自己的神经网络以识别对象并将它们与车辆1100所识别的对象进行比较,并且,如果结果不匹配和深度学习基础设施断定车辆1100中的AI正在发生故障,则服务器1178可以将信号发送到车辆1100,以指示车辆1100的故障安全计算机采取控制、通知乘客并完成安全停车操作。
在至少一个实施例中,服务器1178可以包括GPU 1184和一个或更多个可编程推理加速器(例如NVIDIA的TensorRT 3)。在至少一个实施例中,GPU驱动的服务器和推理加速的组合可以使实时响应成为可能。在至少一个实施例中,例如在性能不太关键的情况下,可以将由CPU、FPGA和其他处理器驱动的服务器用于推理。在至少一个实施例中,推理和/或训练逻辑815用于执行一个或更多个实施例。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。
计算机系统
图12是示出根据至少一个实施例示例性计算机系统的框图,该示例性计算机系统可以是具有互连的设备和组件的系统,片上系统(SOC)或它们的某种形成有处理器的组合,该处理器可以包括执行单元以执行指令。在至少一个实施例中,根据本公开,例如本文所述的实施例,计算机系统1200可以包括但不限于组件,例如处理器1202,其执行单元包括逻辑以执行用于过程数据的算法。在至少一个实施例中,计算机系统1200可以包括处理器,例如可从加利福尼亚圣塔克拉拉的英特尔公司(Intel Corporation of Santa Clara,California)获得的
实施例可以用在其他设备中,例如手持设备和嵌入式应用。手持设备的一些示例包括蜂窝电话、互联网协议(Internet Protocol)设备、数码相机、个人数字助理(“PDA”)和手持PC。在至少一个实施例中,嵌入式应用可以包括微控制器、数字信号处理器(“DSP”)、片上系统、网络计算机(“NetPC”)、机顶盒、网络集线器、广域网(“WAN”)交换机,或根据至少一个实施例可以执行一个或更多个指令的任何其他系统。
在至少一个实施例中,计算机系统1200可包括但不限于处理器1202,该处理器1202可包括但不限于一个或更多个执行单元1208,以根据本文描述的技术执行机器学习模型训练和/或推理。在至少一个实施例中,计算机系统1200是单处理器台式机或服务器系统,但是在另一实施例中,计算机系统1200可以是多处理器系统。在至少一个实施例中,处理器1202可以包括但不限于复杂指令集计算机(“CISC”)微处理器、精简指令集计算(“RISC”)微处理器、超长指令字(“VLIW”)微处理器、实现指令集组合的处理器,或任何其他处理器设备,例如数字信号处理器。在至少一个实施例中,处理器1202可以耦合到处理器总线1210,该处理器总线1210可以在处理器1202与计算机系统1200中的其他组件之间传输数据信号。
在至少一个实施例中,处理器1202可以包括但不限于1级(“L1”)内部高速缓存存储器(“cache”)1204。在至少一个实施例中,处理器1202可以具有单个内部高速缓存或多级内部缓存。在至少一个实施例中,高速缓存存储器可以驻留在处理器1202的外部。根据特定的实现和需求,其他实施例也可以包括内部和外部高速缓存的组合。在至少一个实施例中,寄存器文件1206可以在各种寄存器中存储不同类型的数据,包括但不限于整数寄存器、浮点寄存器、状态寄存器和指令指针寄存器。
在至少一个实施例中,包括但不限于执行整数和浮点运算的逻辑的执行单元1208,其也位于处理器1202中。在至少一个实施例中,处理器1202还可以包括微码(“ucode”)只读存储器(“ROM”),用于存储某些宏指令的微代码。在至少一个实施例中,执行单元1208可以包括用于处理封装指令集1209的逻辑。在至少一个实施例中,通过将封装指令集1209包括在通用处理器的指令集中,以及要执行指令的相关电路,可以使用通用处理器1202中的封装数据来执行许多多媒体应用程序使用的操作。在一个或更多个实施例中,可以通过使用处理器的数据总线的全宽度来在封装的数据上执行操作来加速和更有效地执行许多多媒体应用程序,这可能不需要在处理器的数据总线上传输较小的数据单元来一次执行一个数据元素的一个或更多个操作。
在至少一个实施例中,执行单元1208也可以用在微控制器、嵌入式处理器、图形设备、DSP和其他类型的逻辑电路中。在至少一个实施例中,计算机系统1200可以包括但不限于存储器1220。在至少一个实施例中,存储器1220可以被实现为动态随机存取存储器(“DRAM”)设备、静态随机存取存储器(“SRAM”)设备、闪存设备或其他存储设备。在至少一个实施例中,存储器1220可以存储由处理器1202可以执行的由数据信号表示的指令1219和/或数据1221。
在至少一个实施例中,系统逻辑芯片可以耦合到处理器总线1210和存储器1220。在至少一个实施例中,系统逻辑芯片可以包括但不限于存储器控制器集线器(“MCH”)1216,并且处理器1202可以经由处理器总线1210与MCH 1216通信。在至少一个实施例中,MCH1216可以提供到存储器1220的高带宽存储器路径1218以用于指令和数据存储以及用于图形命令、数据和纹理的存储。在至少一个实施例中,MCH 1216可以在处理器1202、存储器1220和计算机系统1200中的其他组件之间启动数据信号,并且在处理器总线1210、存储器1220和系统I/O 1222之间桥接数据信号。在至少一个实施例中,系统逻辑芯片可以提供用于耦合到图形控制器的图形端口。在至少一个实施例中,MCH 1216可以通过高带宽存储器路径1218耦合到存储器1220,并且图形/视频卡1212可以通过加速图形端口(AcceleratedGraphics Port)(“AGP”)互连1214耦合到MCH 1216。
在至少一个实施例中,计算机系统1200可以使用系统I/O 1222作为专有集线器接口总线来将MCH 1216耦合到I/O控制器集线器(“ICH”)1230。在至少一个实施例中,ICH1230可以通过本地I/O总线提供与某些I/O设备的直接连接。在至少一个实施例中,本地I/O总线可以包括但不限于用于将外围设备连接到存储器1220、芯片组和处理器1202的高速I/O总线。示例可以包括但不限于音频控制器1229、固件集线器(“快闪BIOS”)1228、无线收发器1226、数据存储1224、包含用户输入的传统I/O控制器1223和键盘接口、串行扩展端口1227(例如通用串行总线(USB))和网络控制器1234。数据存储装置1224可以包括硬盘驱动器、软盘驱动器、CD-ROM设备、闪存设备或其他大容量存储设备。
在至少一个实施例中,图12示出了包括互连的硬件设备或“芯片”的系统,而在其他实施例中,图12可以示出示例性SoC。在至少一个实施例中,图中示出的设备可以与专有互连、标准化互连(例如,PCIe)或其某种组合互连。在至少一个实施例中,计算机系统1200的一个或更多个组件使用计算快速链路(CXL)互连来互连。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815可以在系统图12中使用,用于至少部分地基于本文所述的使用神经网络训练操作、神经网络功能和/或架构或神经网络用例计算的权重参数来推理或预测操作。
在至少一个实施例中,如上所述的计算机系统可以用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的计算机系统可以包括存储可执行指令的存储器,该可执行指令由于被计算机系统的处理器执行而导致使计算机系统实现如本文所述的基于模型和无模型的控制系统。
图13是示出根据至少一个实施例的用于利用处理器1310的电子设备1300的框图。在至少一个实施例中,电子设备1300可以是,例如但不限于,笔记本、塔式服务器、机架服务器、刀片服务器、膝上型计算机、台式机、平板电脑、移动设备、电话、嵌入式计算机或任何其他合适的电子设备。
在至少一个实施例中,电子设备1300可以包括但不限于通信地耦合到任何合适数量或种类的组件、外围设备、模块或设备的处理器1310。在至少一个实施例中,处理器1310使用诸如I2C总线、系统管理总线(“SMBus”)、低引脚数(LPC)总线、串行外围接口(“SPI”)、高清音频(“HDA”)总线、串行高级技术附件(“SATA”)总线、通用串行总线(“USB”)(版本1、2、3等)或通用异步接收器/发送器(“UART”)总线之类的总线或接口耦合。在至少一个实施例中,图13示出了系统,该系统包括互连的硬件设备或“芯片”,而在其他实施例中,图13可以示出示例性SoC。在至少一个实施例中,图13中示出的设备与专用互连、标准化互连(例如PCIe)或其某种组合互连。在至少一个实施例中,图13的一个或更多个组件使用计算快速链接(CXL)互连进行互连。
在至少一个实施例中,图13可以包括显示器1324、触摸屏1325、触摸板1330、近场通信单元(“NFC”)1345、传感器集线器1340、热传感器1346、Express芯片组(“EC”)1335、可信平台模块(“TPM”)1338、BIOS/固件/闪存(“BIOS,FW Flash”)1322、DSP 1360、驱动器1320(例如固态磁盘)(“SSD”)或硬盘驱动器(“HDD”)、无线局域网单元(“WLAN”)1350、蓝牙单元1352、无线广域网单元(“WWAN”)1356、全球定位系统(GPS)单元1355、例如USB 3.0相机的相机(“USB3.0相机”)1354和/或例如以LPDDR3标准实施的双倍数据速率(“LPDDR”)存储单元(“LPDDR3”)1315。这些组件可以各自以任何合适的方式实现。
在至少一个实施例中,其他组件可以通过在此描述的组件通信地耦合到处理器1310。在至少一个实施例中,加速度计1341、环境光传感器(“ALS”)1342、罗盘1343和陀螺仪1344可通信地耦合到传感器集线器1340。在至少一个实施例中,热传感器1339、风扇1337、键盘1336和触摸板1330可以通信地耦合到EC1335。在至少一个实施例中,扬声器1363、耳机1364和麦克风(“mic”)1365可以通信地耦合到音频单元(“音频编解码器和D类放大器”)1362,它们又可以通信地耦合到DSP1360。在至少一个实施例中,音频单元1362可以包括,例如但不限于,音频编码器/解码器(“codec”)和D类放大器。在至少一个实施例中,SIM卡(“SIM”)1357可以通信地耦合到WWAN单元1356。在至少一个实施例中,可以以下一代形状因素(NGFF)实现诸如WLAN单元1350和蓝牙单元1352以及WWAN单元1356的组件。
推理和/或训练逻辑815用于执行与一个或多个实施例相关联的推理和/或训练操作。在此结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推论和/或训练逻辑815可以在系统图13中使用,以至少部分地基于使用本文所述的神经网络训练操作、神经网络功能和/或架构或神经网络用例计算出的权重参数来推理或预测操作。
在至少一个实施例中,如上所述的计算机系统可以用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的计算机系统可以包括存储可执行指令的存储器,该可执行指令由于被计算机系统的处理器执行而导致使计算机系统实现如本文所述的基于模型和无模型的控制系统。
图14示出了根据至少一个实施例的计算机系统1400。在至少一个实施例中,计算机系统1400被配置为实现贯穿本公开描述的各种过程和方法。
在至少一个实施例中,计算机系统1400包括但不限于至少一个中央处理单元(“CPU”)1402,该中央处理单元1402连接到使用诸如PCI(“外围组件互连”)、外围组件互连快速(“PCI-快速”)、AGP(“加速图形端口”)、HyperTransport或任何其他总线或点对点通信协议之类的任何合适协议实现的通信总线1410。在至少一个实施例中,计算机系统1400包括但不限于主存储器1404和控制逻辑(例如,实现为硬件、软件或其组合),并且数据被存储在主存储器1404中,其可以采用随机访问存储器(“RAM”)形式。在至少一个实施例中,网络接口子系统(“网络接口”)1422提供到其他计算设备和网络的接口,用于从具有计算机系统1400的其他系统接收数据或向其他系统传输数据。
在至少一个实施例中,计算机系统1400在至少一个实施例中包括但不限于输入设备1408、并行处理系统1412和可以使用常规阴极射线管(“CRT”)实现的显示设备1406、液晶显示器(“LCD”)、发光二极管(“LED”)显示器、等离子显示器或其他合适的显示技术。在至少一个实施例中,从诸如键盘、鼠标、触摸板、麦克风等的输入设备1408接收用户输入。在至少一个实施例中,本文描述的每个模块可以位于单个半导体平台上以形成处理系统。
推理和/或训练逻辑815用于执行与一个或多个实施例相关联的推理和/或训练操作。在此结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推论和/或训练逻辑815可以在系统图14中使用,以至少部分地基于使用本文所述的神经网络训练操作、神经网络功能和/或架构或神经网络用例计算出的权重参数来推理或预测操作。
在至少一个实施例中,如上所述的计算机系统可以用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的计算机系统可以包括存储可执行指令的存储器,该可执行指令由于被计算机系统的处理器执行而使计算机系统实现如本文所述的基于模型和无模型的控制系统。。
图15示出了根据至少一个实施例的计算机系统1500。在至少一个实施例中,计算机系统1500包括但不限于计算机1510和USB棒1520。在至少一个实施例中,计算机1510可以包括但不限于任何数量和类型的处理器(未示出)和一个存储器(未显示)。在至少一个实施例中,计算机1510包括但不限于服务器、云实例、膝上型计算机和台式计算机。
在至少一个实施例中,USB棒1520包括但不限于处理单元1530、USB接口1540和USB接口逻辑1550。在至少一个实施例中,处理单元1530可以是任何指令执行系统、装置、或能够执行指令的设备。在至少一个实施例中,处理单元1530可以包括但不限于任何数量和类型的处理核心(未示出)。在至少一个实施例中,处理单元1530包括专用集成电路(“ASIC”),该专用集成电路被优化为执行与机器学习相关联的任何数量和类型的操作。例如,在至少一个实施例中,处理单元1530是张量处理单元(“TPC”),其被优化以执行机器学习推断操作。在至少一个实施例中,处理单元1530是视觉处理单元(“VPU”),其被优化以执行机器视觉和机器学习推理操作。
在至少一个实施例中,USB接口1540可以是任何类型的USB连接器或USB插座。例如,在至少一个实施例中,USB接口1540是用于数据和电源的USB 3.0Type-C插座。在至少一个实施例中,USB接口1540是USB 3.0Type-A连接器。在至少一个实施例中,USB接口逻辑1550可以包括使处理单元1530能够经由USB连接器1540与设备(例如,计算机1510)接口的任何数量和类型的逻辑。
推理和/或训练逻辑815用于执行与一个或多个实施例相关联的推理和/或训练操作。在此结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推论和/或训练逻辑815可以在系统图15中使用,以至少部分地基于使用本文所述的神经网络训练操作、神经网络功能和/或架构或神经网络用例计算出的权重参数来推理或预测操作。
在至少一个实施例中,如上所述的计算机系统可以用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的计算机系统可以包括存储可执行指令的存储器,该可执行指令由于由计算机系统的处理器执行而导致使计算机系统实现如本文所述的基于模型和无模型的控制系统。
图16A示出了示例性架构,其中多个GPU 1610(1)-1613(N)通过高速链路1640(1)-1640(N)(例如,总线、点对点互连等)通信地耦合到多个多核处理器1605(1)-1606(M)。在至少一个实施例中,高速链路1640(1)-1640(N)支持4GB/s、30GB/s、80GB/s或更高的通信吞吐量。在至少一个实施例中,可以使用各种互连协议,包括但不限于PCIe 4.0或5.0和NVLink2.0。在各个图中,“N”和“M”表示正整数,其值可能因图而异。
另外,在一个实施例中,GPU 1610-1613中的两个或更多个通过高速链路1629(1)-1629(2)互连,可以使用与用于高速链路1640(1)-1640(N)的协议/链路相同或不同的协议/链路来实现。类似地,两个或更多个多核处理器1605可以通过高速链路1628连接,该高速链路可以是以20GB/s、30GB/s、120GB/s或更高速度运行的对称多处理器(SMP)总线。可替代地,以使用相似的协议/链路(例如,通过公共互连结构)来完成图16A中所示的各种系统组件之间的所有通信。
在一个实施例中,每个多核处理器1605分别经由存储器互连1626(1)-1626(M)通信地耦合至处理器存储器1601(1)-1601(M),并且每个GPU 1610(1)-1610(M)通过GPU存储器互连1650(1)-1650(N)通信地耦合至GPU存储器1620(1)-1620(N)。在至少一个实施例中,存储器互连1626和1650可以利用相似或不同的存储器访问技术。作为示例而非限制,处理器存储器1601(1)-1601(M)和GPU存储器1620可以是易失性存储器,诸如动态随机存取存储器(DRAM)(包括堆叠的DRAM)、图形DDR SDRAM(GDDR)(例如,GDDR5、GDDR6)或高带宽内存(HBM)和/或可以是非易失性存储器(例如3D XPoint或Nano-Ram)。在至少一个实施例中,处理器存储器1601的某些部分可以是易失性存储器,而另一部分可以是非易失性存储器(例如,使用两级存储器(2LM)层次结构)。
如本文所述,尽管各种多核处理器1605和GPU 1610可以分别物理地耦合到特定的存储器1601、1620,和/或统一的存储器架构可以实现为虚拟系统地址空间(也称为“有效地址”空间)分布在各种物理存储器之间。例如,当M=2和N=4时,处理器存储器1601(1)-1601(M)每个可以包括64GB的系统存储器地址空间,并且GPU存储器1620(1)-1620(N)每个可以包括32GB的系统存储器地址空间(在该示例中导致总共256GB的可寻址存储器)。N和M为其他值也是可能的。
图16B示出了根据一个示例性实施例的用于多核处理器1607和图形加速模块1646之间的互连的附加细节。在至少一个实施例中,图形加速模块1646可以包括集成在通过高速链路1640耦合到处理器1607的线卡上的一个或更多个GPU芯片。在至少一个实施例中,图形加速模块1646可选的可以与处理器1607集成在同一封装或芯片上。
在至少一个实施例中,所示的处理器1607包括多个核心1660A-1660D,每个核心具有转换后备缓冲器1661A-1661D和一个或更多个高速缓存1662A-1662D。在至少一个实施例中,核心1660A-1660D可以包括用于执行未示出的指令和处理数据的各种其他组件。在至少一个实施例中,高速缓存1662A-1662D可以包括1级(L1)和2级(L2)高速缓存。另外,一个或更多个共享高速缓存1656可以被包括在高速缓存1662A-1662D中,并且由一组核心1660A-1660D共享。例如,处理器1607的一个实施例包括24个核心,每个核心具有其自己的L1高速缓存、十二个共享的L2高速缓存和十二个共享的L3高速缓存。在该实施例中,两个相邻核心共享一个或更多个L2和L3高速缓存。在至少一个实施例中,处理器1607和图形加速模块1646与系统存储器1614连接,系统存储器1614可以包括图16A的处理器存储器1601-1602。
在至少一个实施例中,经由一致性总线1664上的核心间通信,保持存储在各种高速缓存1662A-1662D、1656和系统存储器1614中的数据和指令的一致性。例如,每个高速缓存可具有与其相关联的高速缓存一致性逻辑/电路,该高速缓存一致性逻辑和电路响应于检测到的对特定高速缓存线的读取或写入,在一致性总线1664上进行通信。在至少一个实施例中,在一致性总线1664上实现了缓存监听协议,以监听缓存访问。
在至少一个实施例中,代理电路1625将图形加速模块1646通信地耦合到一致性总线1664,从而允许图形加速模块1646作为核心1660A-1660D的对等方参与高速缓存一致性协议。特别地,在至少一个实施例中,接口1635通过高速链路1640提供到代理电路1625的连接,并且接口1637将图形加速模块1646连接到链路1640。
在至少一个实施例中,加速器集成电路1636代表图形加速模块1646的多个图形处理引擎1631、1632、N,提供缓存管理、存储器访问、上下文管理和中断管理服务。在至少一个实施例中,图形处理引擎1631、1632、N,可以各自包括单独的图形处理单元(GPU)。在至少一个实施例中,图形处理引擎1631(1)-1631(N)可选地可包括GPU内的不同类型的图形处理引擎,诸如图形执行单元、媒体处理引擎(例如,视频编码器/解码器)、采样器和双轨引擎。在至少一个实施例中,图形加速模块1646可以是具有多个图形处理引擎1631(1)-1631(N)的GPU或图形处理引擎1631(1)-1631(N)可以是集成在普通封装、线卡或芯片上的单独的GPU。
在至少一个实施例中,加速器集成电路1636包括存储器管理单元(MMU)1639,用于执行各种存储器管理功能,例如虚拟到物理存储器转换(也称为有效到实际存储器转换)和用于访问系统存储器1614的存储器访问协议。在至少一个实施例中,MMU 1639还可以包括转换后备缓冲器(TLB)(未示出),用于将虚拟/有效地址转换为物理/实际地址。在至少一种实施例中,高速缓存1638可以存储命令和数据,以供图形处理引擎1631(1)-1631(N)有效访问。在一个实施例中,存储在高速缓存1638和图形存储器1633(1)-1633(M)中的数据可能使用获取单元1644与核心高速缓存1662A-1662D、1656和系统存储器1614保持一致。如上所述,这可以经由代表高速缓存1638和存储器1633(1)-1633(M)的代理电路1625(例如,将更新发送到与处理器高速缓存1662A-1662D、1656上的高速缓存线的修改/访问有关的高速缓存1638并从高速缓存1638接收更新)来完成。
在至少一个实施例中,一组寄存器1645存储上下文数据用于由图形处理引擎1631(1)-1631(N)执行的线程,并且上下文管理电路1648管理线程上下文。例如,上下文管理电路1648可以执行保存和还原操作以在上下文切换期间保存和还原各个线程的上下文(例如,其中保存第一线程并且存储第二线程,使得第二线程可以由图形处理引擎执行)。例如,在上下文切换上,上下文管理电路1648可以将当前寄存器值存储到存储器中的指定区域(例如,由上下文指针标识)。然后,当返回上下文时,它可以恢复寄存器值。在至少一个实施例中,中断管理电路1647接收并处理从系统设备接收的中断。
在一个实现中,MMU 1639将来自图形处理引擎1631的虚拟/有效地址转换为系统存储器1614中的实际/物理地址。在至少一个实施例中,加速器集成电路1636支持多个(例如4、8、16)图形加速器模块1646和/或其他加速器设备。在至少一个实施例中,图形加速器模块1646可以专用于在处理器2307上执行的单个应用程序,或者可以在多个应用程序之间共享。在至少一个实施例中,提出了一种虚拟化图形执行环境,其中图形处理引擎1631(1)-1631(N)的资源与多个应用程序或虚拟机(VM)共享。在至少一个实施例中,可以基于与VM和/或应用程序相关联的处理要求和优先级,将资源细分为“切片”,将其分配给不同的VM和/或应用程序。
在至少一个实施例中,加速器集成电路1636充当用于图形加速模块1646的系统的桥梁,并提供地址转换和系统存储器高速缓存服务。另外,在至少一个实施例中,加速器集成电路1636可以为主机处理器提供虚拟化设施,以管理图形处理引擎1631(1)-1631(N)的虚拟化,中断和存储器管理。
在至少一个实施例中,因为图形处理引擎1631(1)-1631(N)的硬件资源被显式映射到主机处理器1607看到的真实地址空间,所以任何主机处理器都可以使用有效地址值直接寻址这些资源。在至少一个实施例中,加速器集成电路1636的一个功能是图形处理引擎1631(1)-1631(N)的物理分隔,使得它们在系统中表现为独立的单元。
在至少一个实施例中,一个或更多个图形存储器1633(1)-1633(M)分别耦合到图形处理引擎1631(1)-1631(N)中的每一个,并且N=M。在至少一个实施例中,图形存储器1633(1)-1633(M)存储由每个图形处理引擎1631(1)-1631(N)处理的指令和数据。在至少一个实施例中,图形存储器1633(1)-1633(M)可以是易失性存储器,例如DRAM(包括堆叠的DRAM)、GDDR存储器(例如,GDDR5、GDDR6)或HBM,和/或可以是非易失性存储器(例如3DXPoint或Nano-Ram)。
在一个实施例中,为了减少高速链路1640上的数据流量,使用偏置技术以确保存储在图形存储器1633(1)-1633(M)中的数据将是图形处理引擎1631(1)-1631(N)和30最频繁使用和核心2360A-2360D最好不要使用(至少不经常使用)的数据。类似地,在至少一个实施例中,偏置机制尝试将核心(最好不是图形处理引擎1631(1)-1631(N))所需的数据保持在核心和系统存储器1614的高速缓存1662A-1662D、1656中。
图16C示出了另一示例性实施例,其中加速集成电路1636被集成在处理器1607内。在该实施例中,图形处理引擎1631(1)-1631(N)经由接口1637和接口1635通过高速链路1640直接与加速器集成电路1636通信(再次,可以利用任何形式的总线或接口协议)。在至少一个实施例中,加速器集成电路1636可以执行与关于图16B描述的操作相同的操作,但是鉴于其紧密靠近一致性总线1664和高速缓存1662A-1662D、1656,可能具有更高的吞吐量。一个实施例支持不同的编程模型,包括专用-处理编程模型(无图形加速模块虚拟化)和共享编程模型(具有虚拟化),其可以包括由加速器集成电路1636控制的编程模型和由图形加速模块1646控制的编程模型。
在至少一个实施例中,图形处理引擎1631(1)-1631(N)专用于单个操作系统下的单个应用程序或处理。在至少一个实施例中,单个应用程序可以将其他应用程序请求集中到图形处理引擎1631(1)-1631(N),从而在VM/分区内提供虚拟化。
在至少一个实施例中,图形处理引擎1631(1)-1631(N)可以被多个VM/应用程序分区共享。在至少一个实施例中,共享模型可以使用系统管理程序来虚拟化图形处理引擎1631(1)-1631(N)以允许每个操作系统的访问。在至少一个实施例中,对于没有管理程序的单个分区系统,操作系统拥有图形处理引擎1631(1)-1631(N)。在至少一个实施例中,操作系统可以虚拟化图形处理引擎1631(1)-1631(N)以提供对每个进程或应用程序的访问。
在至少一个实施例中,图形加速模块1646或单独的图形处理引擎1631(1)-1631(N)使用进程句柄来选择处理元件。在一个实施例中,处理元件被存储在系统存储器1614中,并且可使用本文所述的有效地址到真实地址转换技术来寻址。在至少一个实施例中,进行句柄可以是在向图形处理引擎1631(1)-1631(N)注册其上下文时向主机进程提供的特定于实现的值(即,调用系统软件以将处理元件添加到处理元件链表)。在至少一个实施例中,进程句柄的低16位可以是进程元件在链表中的偏移量。
图16D示出了示例性加速器集成片1690。在至少一个实施例中,如本文中所使用的,“片”包括加速集成电路1636的处理资源的指定部分。系统存储器1614内的应用程序有效地址空间1682存储处理元件1683。在至少一个实施例中,处理元件1683响应于处理器1607上执行的应用程序1680的GPU调用1681来存储。在至少一个实施例中,处理元件1683包含对应应用程序1680的处理状态。处理元件1683中包含的工作描述符(WD)1684可以是应用程序请求的单个作业或可能包含指向作业队列的指针。在至少一个实施例中,WD 1684是指向应用程序地址空间1682中的作业请求队列的指针。
在至少一个实施例中,图形加速模块1646和/或单个图形处理引擎1631(1)-1631(N)可以由系统中的全部或部分进程共享。在至少一个实施例中,可以包括用于设置进程状态并将WD 1684发送到图形加速模块1646以在虚拟化环境中开始作业的基础设施。
在至少一个实施例中,专用进程编程模型是特定于实现的。在至少一个实施例中,在该模型中,单个进程拥有图形加速模块1646或单个图形处理引擎1631。在至少一个实施例中,由于图形加速模块1646由单个进程拥有,因此在分配图形加速模块1646时,管理程序为拥有的分区初始化加速器集成电路1636,以及操作系统为拥有进程初始化加速器集成电路1636。
在至少一个实施例中,在操作中,加速器集成片1690中的WD获取单元1691获取下一个WD 1684,其中包括要由图形加速模块1646的一个或更多个图形处理引擎完成的工作的指示。在至少一个实施例中,来自WD 1684的数据可以存储在寄存器1645中和被MMU1639、中断管理电路1647和/或上下文管理电路1648使用,如图所示。例如,MMU 1639的一个实施例包括用于访问OS虚拟地址空间1685内的片段/页面表1686的片段/页面漫游电路。在至少一个实施例中,中断管理电路1647可以处理从图形加速接收的中断事件1692。在至少一个实施例中,当执行图形操作时,由图形处理引擎1631(1)-1631(N)生成的有效地址1693被MMU 1639转换为实际地址。
在一个实施例中,为每个图形处理引擎1631(1)-1631(N)和/或图形加速模块1646复制相同的寄存器组1645,并且可以由系统管理程序或操作系统来初始化。在至少一个实施例中,这些重复的寄存器中的每一个都可以包括在加速器集成片1690中。表1中显示了可由管理程序初始化的示例性寄存器。
表1–管理程序初始化的寄存器
表2中示出了由操作系统初始化的示例性寄存器
表2–操作系统初始化的寄存器
在至少一个实施例中,每个WD 1684特定于特定的图形加速模块1646和/或图形处理引擎1631(1)-1631(N)。在至少一个实施例中,它包含图形处理引擎1631(1)-1631(N)进行工作所需的所有信息,或者它可以是一个指向存储器位置的指针,在该位置应用程序已经建立了要完成的工作的命令队列。
图16E示出了共享模型的一个示例性实施例的附加细节。该实施例包括管理程序真实地址空间1698,其中存储了处理元件列表1699。在至少一个实施例中,可通过管理程序1696访问管理程序实际地址空间1698,管理程序1696虚拟化用于操作系统1695的图形加速模块引擎。
在至少一个实施例中,共享编程模型允许来自系统中所有分区或分区的子集的全部进程或进程子集使用图形加速模块1646。在至少一个实施例中,存在由多个进程和分区(也就是,时间切片共享和图形定向共享)共享图形加速模块1646的两个编程模型。
在至少一个实施例中,在此模型中,系统管理程序1696拥有图形加速模块1646,并且其功能可用于所有操作系统1695。在至少一个实施例中,为了使图形加速模块1646支持系统管理程序1696进行虚拟化,图形加速模块1646可以遵循特定要求,诸如:1)应用程序的作业请求必须是自主的(即,不需要在作业之间保持状态),否则图形加速模块1646必须提供上下文保存和还原机制。2)图形加速模块1646保证应用程序的作业请求在指定的时间内完成,包括任何翻译错误,或者图形加速模块1646提供了抢占作业处理的能力。3)当在定向共享编程模型中操作时,必须确保图形加速模块1646在进程之间的公平性。
在至少一个实施例中,需要应用程序1680进行具有图形加速模块1646类型、工作描述符(WD)、权限掩码寄存器(AMR)值和上下文保存/恢复区域指针(CSRP)的操作系统1695系统调用。在至少一个实施例中,图形加速模块类型描述了用于系统调用的目标加速功能。在至少一个实施例中,图形加速模块类型可以是特定于系统的值。在至少一个实施例中,WD是专门针对图形加速模块1646格式化的,并且可以是以下形式:图形加速模块1646命令、指向用户定义结构的有效地址指针、指向命令队列的有效地址指针、或任何其他数据结构以描述要由图形加速模块1646完成的工作。
在至少一个实施例中,AMR值是要用于当前进程的AMR状态。在至少一个实施例中,传递给操作系统的值类似于设置AMR的应用程序。在至少一个实施例中,如果加速集成电路1636和图形加速模块1646实现不支持用户授权掩码覆盖寄存器(UAMOR),则操作系统可以在管理程序调用中传递AMR之前将当前UAMOR值应用于AMR值。在至少一个实施例中,系统管理程序1696可以在将AMR放入处理元件1683之前,可选地应用当前的授权掩码覆盖寄存器(AMOR)值。在至少一个实施例中,CSRP是寄存器1645之一,其中包含应用程序地址空间1682中某个区域的有效地址,以用于图形加速模块1646保存和恢复上下文状态。在至少一个实施例中,如果不需要在作业之间保存状态或抢占作业,则此指针是可选的。在至少一个实施例中,上下文保存/恢复区域可以是固定的系统存储器。
在接收到系统调用后,操作系统1695可以验证应用程序1680已注册并被授权使用图形加速模块1646。在至少一个实施例中,然后,操作系统1695使用表3中所示的信息调用管理程序1696。
表3–OS调用信息调用管理程序
在至少一个实施例中,在接收到管理程序调用之后,管理程序1696验证操作系统1695已注册并被授权使用图形加速模块1646。在至少一个实施例中,管理程序1696然后将处理元件1683放入对应的图形加速模块1646类型的处理元件链接列表中。在至少一个实施例中,处理元件可能包含表4中所示的信息。
表4–处理元件信息
在至少一个实施例中,管理程序初始化多个加速器集成片1690寄存器1645。
如图16F中所示,在至少一个实施例中,使用统一存储器,该统一存储器可通过用于访问物理处理器存储器1601(1)-1601(N)和GPU存储器1620(1)-1620(N)的公共虚拟存储器地址空间来寻址。在该实现中,在GPU 1610(1)-1610(N)上执行的操作利用相同的虚拟/有效存储器地址空间来访问处理器存储器1601(1)-1601(N),反之亦然,从而简化了可编程性。在一个实施例中,虚拟/有效地址空间的第一部分被分配给处理器存储器1601(1)、第二部分被分配给第二处理器存储器1601(N)、第三部分被分配给GPU存储器1601(1),等等。在至少一个实施例中,整个虚拟/有效存储器空间(有时称为有效地址空间)由此分布在处理器存储器1601和GPU存储器1620中的每一个上,从而允许任何处理器或GPU访问具有映射到该内存的虚拟地址的任何物理存储器。
在一个实施例中,一个或更多个MMU 1639A-1639E内的偏置/一致性管理电路1694A-1694E确保一个或更多个主机处理器(例如1605)和GPU 1610的缓存之间的缓存一致性,并实施指示在其中应存储某些类型的数据的物理存储器的偏置技术。尽管在图16中示出了偏置/一致性管理电路1694A-1694E的多个实例,可以在一个或更多个主机处理器1605的MMU内和/或在加速器集成电路1636内实现偏置/一致性电路。
一个实施例允许GPU存储器1620被映射为系统存储器的一部分,并使用共享虚拟存储器(SVM)技术进行访问,但不会遭受与完整系统高速缓存一致性相关的性能缺陷。在至少一个实施例中,将GPU存储器1620作为系统存储器来访问而没有繁重的高速缓存一致性开销的能力为GPU卸载提供了有益的操作环境。在至少一个实施例中,这种安排允许主机处理器F05软件设置操作数并访问计算结果,而不会产生传统I/O DMA数据副本的开销。在至少一个实施例中,此类传统副本涉及驱动程序调用,中断和内存映射的I/O(MMIO)访问,这些访问相对于简单的内存访问而言效率低下。在至少一个实施例中,在没有高速缓存一致性开销的情况下访问GPU存储器1620的能力对于卸载的计算的执行时间是关键的。在至少一个实施例中,例如,在具有大量流传输写入存储器流量的情况下,缓存一致性开销会大大降低GPU 1610看到的有效写入带宽。在至少一个实施例中,操作数设置的效率,结果访问的效率以及GPU计算的效率可以在确定GPU卸载的效率中起作用。
在至少一个实施例中,GPU偏置和主处理器偏置的选择由偏差追踪器数据结构驱动。在至少一个实施例中,例如,可以使用偏置表,该偏置表可以是页面粒度结构(即,以存储器页面的粒度来控制),每个附接到GPU的存储器页面包括1或2位。在至少一个实施例中,可以在一个或更多个GPU存储器1620的被盗存储器范围中实现偏置表,在GPU 1610中具有或不具有偏差高速缓存(例如,以高速缓存频繁/最近使用的偏置表的条目)。可选地,在至少一个实施例中,可以在GPU内维护整个偏置表。
在至少一个实施例中,在实际访问GPU存储器之前访问与对附接到GPU的存储器1620的每次访问相关联的偏置表条目,从而引起以下操作。在至少一个实施例中,来自GPU1610的本地请求(在GPU偏置中找到其页面)被直接转发到相应的GPU存储器1620。在至少一个实施例中,来自GPU的在主机偏置中找到其页面的本地请求被转发到处理器1605(例如,如上所述,通过高速链路)。在至少一个实施例中,来自处理器1605的在主机处理器偏置中找到所请求的页面请求完成了与普通存储器读取类似的请求。可选地,可以将针对GPU偏置的页面的请求转发给GPU 1610。在至少一个实施例中,如果GPU当前不使用页面,则GPU可以将页面转换为主机处理器偏置。在至少一个实施例中,页面的偏置状态可以通过基于软件的机制,通过硬件辅助的基于软件的机制或者在有限的情况下,可以纯粹通过基于硬件的机制来改变。
在至少一个实施例中,一种用于改变偏置状态的机制采用API调用(例如OpenCL),该调用反过来又调用GPU的设备驱动程序,该设备驱动程序反过来又将消息(或排队命令描述符)发送给GPU,以指导其进行更改偏置状态,并且对于某些过渡,在主机中执行高速缓存刷新操作。在至少一个实施例中,高速缓存刷新操作用于从主机处理器1605偏置到GPU偏置的转变,但是不用于相反的转变。
在一个实施例中,通过暂时使主机处理器1605无法缓存GPU偏置的页面,来保持缓存一致性。在至少一个实施例中,为了访问这些页面,处理器1605可以请求GPU 1610进行访问,该访问可以立即或可以不立即授权。在至少一个实施例中,为了减少处理器1605与GPU1610之间的通信,确保GPU偏置的页面是GPU所需的页面而不是主机处理器1605所需要的页面是有益的,反之亦然。
硬件结构815用于执行一个或更多个实施例。在此结合图8A和/或图8B提供关于硬件结构(x)815的细节。
图17示出了根据本文所述的各种实施例的示例性集成电路和相关联的图形处理器,其可以使用一个或更多个IP核心来制造。除了图示之外,在至少一个实施例中可以包括其他逻辑和电路,包括另外的图形处理器/核心、外围接口控制器或通用处理器核。
图17是说明根据至少一个实施例的可使用一个或更多个IP核心来制造的芯片集成电路1700上的示例性系统的框图。在至少一个实施例中,集成电路1700包括一个或更多个应用处理器1705(例如,CPU)、至少一个图形处理器1710,并且可以另外包括图像处理器1715和/或视频处理器1720,他们中的任何一个可能是模块化IP核心。在至少一个实施例中,集成电路1700包括外围或总线逻辑,其包括USB控制器1725、UART控制器1730、SPI/SDIO控制器1735和I
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。在此结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推断和/或训练逻辑815可以在集成电路1700中使用,以至少部分地基于使用本文所述的神经网络训练操作、神经网络功能和/或架构或神经网络用例计算出的权重参数来推理或预测操作。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图18A-图18B示出了根据本文所述的各个实施例的示例性集成电路和相关联的图形处理器,其可以使用一个或更多个IP核心来制造。除了图示的之外,在至少一个实施例中还可以包括其他逻辑和电路,包括附加的图形处理器/核心、外围接口控制器或通用处理器核心。
图18A-图18B是示出根据本文描述的实施例的用于在SoC内使用的示例性图形处理器的框图。图18A示出了根据至少一个实施例的芯片集成电路上系统的另外示例性图形处理器1810,其可以使用一个或更多个IP核心来制造。图18B示出了根据至少一个实施例的芯片集成电路上系统的示例性图形处理器1840,其可以使用一个或更多个IP核心来制造。在至少一个实施例中,图18A的图形处理器1810是低功耗图形处理器核心。在至少一个实施例中,图18B的图形处理器1840是更高性能的图形处理器核心。在至少一个实施例中,每个图形处理器1810、1840可以是图17的图形处理器1710的变体。
在至少一个实施例中,图形处理器1810包括顶点处理器1805和一个或更多个片段处理器1815A-1815N(例如1815A、1815B、1815C、1815D至1815N-1和1815N)。在至少一个实施例中,图形处理器1810可以经由单独的逻辑来执行不同的着色器程序,使得顶点处理器1805被优化以执行针对顶点着色器程序的操作,而一个或更多个片段处理器1815A-1815N执行针对片段的片段(例如,像素)着色操作或像素着色器程序。在至少一个实施例中,顶点处理器1805执行3D图形管线的顶点处理阶段并生成图元和顶点数据。在至少一个实施例中,一个或更多个片段处理器1815A-1815N使用由顶点处理器1805生成的图元和顶点数据来生成在显示设备上显示的帧缓冲区。在至少一个实施例中,一个或更多个片段处理器1815A-1815N被优化以执行如在OpenGL API中所提供的片段着色器程序,其可以用于执行与在Direct 3D API中所提供的像素着色器程序类似的操作。
在至少一个实施例中,图形处理器1810附加地包括一个或更多个内存管理单元(MMU)1820A-1820B、高速缓存1818A-1818B和电路互连1830A-1830B。在至少一个实施例中,一个或更多个MMU 1820A-1820B提供用于图形处理器1810的虚拟到物理地址的映射,包括用于顶点处理器1805和/或片段处理器1815A-1815N的,除了存储在一个或更多个高速缓存1818A-1818B中的顶点或图像/纹理数据之外,其还可以引用存储在存储器中的顶点或图像/纹理数据。在至少一个实施例中,一个或更多个MMU 1820A-1820B可以与系统内的其他MMU同步,包括与图17的一个或更多个应用处理器1705、图像处理器1715和/或视频处理器1720相关联的一个或更多个MMU,使得每个处理器1705-1720可以参与共享或统一虚拟存储器系统。在至少一个实施例中,一个或更多个电路互连1830A-1830B使图形处理器1810能够经由SoC的内部总线或经由直接连接与SoC内的其他IP核心相接合。
在至少一个实施例中,图形处理器1840包括一个或更多个着色器核心1855A-1855N(例如,1855A、1855B、1855C、1855D、1855E、1855F、直到1855N-1和1855N),其提供了统一的着色器核心架构,其中单个核心或类型或核心可以执行所有类型的可编程着色器代码,包括用于实现顶点着色器、片段着色器和/或计算着色器的着色器程序代码。在至少一个实施例中,多个着色器核心可以变化。在至少一个实施例中,图形处理器1840包括核心间任务管理器1845,其充当线程分派器,以将执行线程分派给一个或更多个着色器核心1855A-1855N和分块单元1858,以加速基于图块的渲染的分块操作,其中在图像空间中细分了场景的渲染操作,例如,以利用场景内的局部空间相干来优化内部高速缓存的使用。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815可以在图18A和/或图18B的集成电路中使用,用于至少部分地基于使用神经网络训练操作、神经网络功能或架构或本文所述的神经网络用例计算的权重参数来进行推理或预测操作。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图19A-图19B示出了根据本文描述的实施例的附加的示例性图形处理器逻辑。在至少一个实施例中,图19A示出了可以包括在图17的图形处理器1710内的图形核心1900,在至少一个实施例中,其可以是图18B中的统一着色器核心1855A-1855N。图19B示出了在至少一个实施例中的适用于在多芯片模块上部署的高度并行的通用图形处理单元1930。
在至少一个实施例中,图形核心1900包括共享指令高速缓存1902、纹理单元1918和高速缓存/共享存储器1920,它们是图形核心1900内的执行资源所共有的。在至少一个实施例中,图形核心1900可以包括多个切片1901A-1901N或用于每个核心的分区,图形处理器可以包括图形核心1900的多个实例。切片1901A-1901N可以包括支持逻辑,该支持逻辑包括本地指令高速缓存1904A-1904N、线程调度器1906A-1906N、线程分派器1908A-1908N和一组寄存器1910A-1910N。在至少一个实施例中,切片1901A-1901N可以包括一组附加功能单元(AFU 1912A-1912N)、浮点单元(FPU 1914A-1914N)、整数算术逻辑单元(ALU 1916-1916N)、地址计算单元(ACU 1913A-1913N)、双精度浮点单元(DPFPU 1915A-1915N)和矩阵处理单元(MPU 1917A-1917N)。
在至少一个实施例中,FPU 1914A-1914N可以执行单精度(32位)和半精度(16位)浮点运算,而DPFPU 1915A-1915N可以执行双精度(64位)浮点运算。在至少一个实施例中,ALU 1916A-1916N可以以8位、16位和32位精度执行可变精度整数运算,并且可以被配置用于混合精度运算。在至少一个实施例中,MPU 1917A-1917N还可被配置用于混合精度矩阵运算,包括半精度浮点运算和8位整数运算。在至少一个实施例中,MPU 1917A-1917N可以执行各种矩阵运算,以加速机器学习应用框架,包括使得能够支持加速的通用矩阵到矩阵乘法(GEMM)。在至少一个实施例中,AFU 1912A-1912N可以执行浮点单元或整数单元不支持的附加逻辑运算,包括三角运算(例如,sine、cosine等)。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815可以在图形核心1900中使用,用于至少部分地基于使用神经网络训练操作、神经网络功能和/或架构或本文描述的神经网络用例计算的权重参数来进行推理或预测操作。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图19B示出了在至少一个实施例中的通用处理单元(GPGPU)1930,其可以被配置为使得高度并行的计算操作能够由图形处理单元阵列来执行。在至少一个实施例中,GPGPU1930可以直接链接到GPGPU 1930的其他实例,以创建多GPU集群,以提高深度神经网络的训练速度。在至少一个实施例中,GPGPU 1930包括主机接口1932,以实现与主机处理器的连接。在至少一个实施例中,主机接口1932是PCI Express接口。在至少一个实施例中,主机接口1932可以是厂商专用的通信接口或通信结构。在至少一个实施例中,GPGPU 1930从主机处理器接收命令,并使用全局调度器1934将与那些命令相关联的执行线程分发给一组计算集群1936A-1936H。在至少一个实施例中,计算集群1936A-1936H共享高速缓存存储器1938。在至少一个实施例中,高速缓存存储器1938可以用作计算集群1936A-1936H内的高速缓存存储器的高级高速缓存。
在至少一个实施例中,GPGPU 1930包括经由一组存储器控制器1942A-1942B与计算集群1936A-1936H耦合的存储器1944A-1944B。在至少一个实施例中,存储器1944A-1944B可以包括各种类型的存储器设备,包括动态随机存取存储器(DRAM)或图形随机存取存储器,例如同步图形随机存取存储器(SGRAM),包括图形双倍数据速率(GDDR)存储器。
在至少一个实施例中,计算集群1936A-1936H各自包括一组图形核心,诸如图19A的图形核心1900,其可以包括多种类型的整数和浮点逻辑单元,其可以以包括适用于机器学习计算的精度范围执行计算操作。例如,在至少一个实施例中,每个计算集群1936A-1936H中的浮点单元的至少一个子集可以配置为执行16位或32位浮点运算,而浮点单元的不同子集可以配置为执行64位浮点运算。
在至少一个实施例中,GPGPU 1930的多个实例可以被配置为操作为计算集群。在至少一个实施例中,计算集群1936A-1936H用于同步和数据交换的通信在实施例之间变化。在至少一个实施例中,GPGPU 1930的多个实例通过主机接口1932进行通信。在至少一个实施例中,GPGPU 1930包括I/O集线器1939,其将GPGPU 1930与GPU链路1940耦合,其实现了至GPGPU 1930的其他实例的直接连接。在至少一个实施例中,GPU链路1940耦合到专用GPU到GPU桥,其使得能够在GPGPU 1930的多个实例之间进行通信和同步。在至少一个实施例中,GPU链路1940与高速互连耦合,以向其他GPGPU或并行处理器发送和接收数据。在至少一个实施例中,GPGPU 1930的多个实例位于单独的数据处理系统中,并经由可经由主机接口1932访问的网络设备进行通信。在至少一个实施例中,GPU链路1940可被配置为使得能够连接到主机处理器,附加或替代主机接口1932。
在至少一个实施例中,GPGPU 1930可以配置为训练神经网络。在至少一个实施例中,可以在推理平台内使用GPGPU 1930。在其中使用GPGPU 1930进行推理的至少一个实施例中,相对于当使用GPGPU训练神经网络时,GPGPU可以包括更少的计算集群1936A-1936H。在至少一个实施例中,与存储器1944A-1944B相关联的存储器技术可以在推理和训练配置之间有所不同,其中更高带宽的存储器技术专用于训练配置。在至少一个实施例中,GPGPU1930的推理配置可以支持推理特定指令。例如,在至少一个实施例中,推理配置可以提供对一个或更多个8位整数点积指令的支持,该指令可以在部署的神经网络的推理操作期间使用。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815可以在GPGPU1930中使用,用于至少部分地基于本文描述的使用神经网络训练操作、神经网络功能和/或架构或神经网络用例计算的权重参数来推理或预测操作。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图20是示出根据至少一个实施例的计算系统2000的框图。在至少一个实施例中,计算系统2000包括处理子系统2001,其具有一个或更多个处理器2002和经由互连路径通信的系统存储器2004,互连路径可以包括存储器集线器2005。在至少一个实施例中,存储器集线器2005可以是芯片组组件内的单独组件,也可以集成在一个或更多个处理器2002内。在至少一个实施例中,存储器集线器2005经由通信链路2006与I/O子系统2011耦合。在至少一个实施例中,I/O子系统2011包括I/O集线器2007,其可以使计算系统2000能够接收来自一个或更多个输入设备2008的输入。在至少一个实施例中,I/O集线器2007可以使能显示控制器,其可以包括在一个或更多个处理器2002中,用于向一个或更多个显示设备2010A提供输出。在至少一个实施例中,与I/O集线器2007耦合的一个或更多个显示设备2010A可以包括本地、内部或嵌入式显示设备。
在至少一个实施例中,处理子系统2001包括经由总线或其他通信链路2013耦合到存储器集线器2005的一个或更多个并行处理器2012。在至少一个实施例中,通信链路2013可以是许多基于标准的通信链路技术或协议中的一种,例如但不限于PCI快速,或者可以是供应商特定的通信接口或通信结构。在至少一个实施例中,一个或更多个并行处理器2012形成计算集中的并行或向量处理系统,其可以包括大量的处理核心和/或处理集群,例如集成多核心(MIC)处理器。在至少一个实施例中,一个或更多个并行处理器2012形成可以将像素输出到经由I/O集线器2007耦合的一个或更多个显示设备2010A之一的图形处理子系统。在至少一个实施例中,一个或更多个并行处理器2012还可以包括显示控制器和显示接口(未示出),以使得能够直接连接到一个或更多个显示设备2010B。
在至少一个实施例中,系统存储单元2014可以连接到I/O集线器2007,以提供用于计算系统2000的存储机制。在至少一个实施例中,I/O开关2016可以用于提供接口机制,以实现I/O集线器2007与其他组件之间的连接,例如可以集成到平台中的网络适配器2018和/或无线网络适配器2019,以及可以经由一个或更多个附加设备2020添加的各种其他设备。在至少一个实施例中,网络适配器2018可以是以太网适配器或另一有线网络适配器。在至少一个实施例中,无线网络适配器2019可以包括Wi-Fi、蓝牙、近场通信(NFC)中的一个或更多个或包括一个或更多个无线电的其他网络设备。
在至少一个实施例中,计算系统2000可以包括未明确示出的其他组件,包括USB或其他端口连接、光存储驱动器、视频捕获设备等,也可以连接到I/O集线器2007。在至少一个实施例中,对图20中的各个组件进行互连的通信路径可以使用任何合适的协议来实现,诸如基于PCI(外围组件互连)的协议(例如,PCI-快速),或其他总线或点对点通信接口和/或协议(例如,NV-链路高速互连或互连协议)。
在至少一个实施例中,一个或更多个并行处理器2012包括针对图形和视频处理而优化的电路(包括例如视频输出电路),并构成图形处理单元(GPU)。在至少一个实施例中,一个或更多个并行处理器2012包括针对通用处理而优化的电路。在至少一个实施例中,计算系统2000的组件可以与单个集成电路上的一个或更多个其他系统元件集成。例如,在至少一个实施例中,一个或更多个并行处理器2012、存储器集线器2005、处理器2002和I/O集线器2007可以被集成到片上系统(SoC)集成电路中。在至少一个实施例中,计算系统2000的组件可以被集成到单个封装中以形成系统级封装(SIP)配置。在至少一个实施例中,计算系统2000的组件的至少一部分可以被集成到多芯片模块(MCM)中,该多芯片模块可以与其他多芯片模块互连到模块化计算系统中。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815可以在图20的系统中使用,用于至少部分地基于使用神经网络训练操作、神经网络功能和/或架构或本文所述的神经网络用例计算出的权重参数来进行推理或预测操作。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
处理器
图21A示出了根据至少一个实施例的并行处理器2100。在至少一个实施例中,并行处理器2100的各种组件可以使用一个或更多个集成电路设备来实现,例如可编程处理器、专用集成电路(ASIC)或现场可编程门阵列(FPGA)。在至少一个实施例中,所示的并行处理器2100是根据示例性实施例的图20所示的一个或更多个并行处理器2012的变体。
在至少一个实施例中,并行处理器2100包括并行处理单元2102。在至少一个实施例中,并行处理单元2102包括I/O单元2104,其使得能够与其他设备进行通信,包括并行处理单元2102的其他实例。在至少一个实施例中,I/O单元2104可以直接连接到其他设备。在至少一个实施例中,I/O单元2104通过使用集线器或交换机接口(例如,存储器集线器2105)与其他设备连接。在至少一个实施例中,存储器集线器2105与I/O单元2104之间的连接形成通信链路2113。在至少一个实施例中,I/O单元2104与主机接口2106和存储器交叉开关2116连接,其中主机接口2106接收用于执行处理操作的命令,而存储器交叉开关2116接收用于执行存储器操作的命令。
在至少一个实施例中,当主机接口2106经由I/O单元2104接收命令缓冲区时,主机接口2106可以引导工作操作以执行那些命令到前端2108。在至少一个实施例中,前端2108与调度器2110耦合,调度器2110配置成将命令或其他工作项分配给处理集群阵列2112的集群。在至少一个实施例中,调度器2110确保在将任务分配给处理集群阵列2112之前,处理集群阵列2112被正确地配置并且处于有效状态。在至少一个实施例中,调度器2110通过在微控制器上执行的固件逻辑来实现。在至少一个实施例中,微控制器实现的调度器2110可配置成以粗粒度和细粒度执行复杂的调度和工作分配操作,从而实现对在处理阵列2112上执行的线程的快速抢占和环境切换。在至少一个实施例中,主机软件可以证明用于通过多个图形处理路径之一在处理集群阵列2112上进行调度的工作负载。在至少一个实施例中,工作负载然后可以由包括调度器2110的微控制器内的调度器2110逻辑在处理阵列2112上自动分配。
在至少一个实施例中,处理集群阵列2112可以包括多达“N”个处理集群(例如,集群2114A、集群2114B到集群2114N),其中,“N”代表正整数(其中,可能在不同的图中使用不同的整数“N”)。在至少一个实施例中,处理集群阵列2112的每个集群2114A-2114N可以执行大量并发线程。在至少一个实施例中,调度器2110可以使用各种调度和/或工作分配算法将工作分配给处理集群阵列2112的集群2114A-2114N,其可以根据每种程序或计算类型产生的工作负载而变化。在至少一个实施例中,调度可以由调度器2110动态地处理,或者可以在配置为由处理集群阵列2112执行的程序逻辑的编译期间部分地由编译器逻辑来辅助。在至少一个实施例中,可将处理集群阵列2112的不同的集群2114A-2114N分配用于处理不同类型的程序或用于执行不同类型的计算。
在至少一个实施例中,处理集群阵列2112可以配置成执行各种类型的并行处理操作。在至少一个实施例中,处理集群阵列2112配置成执行通用并行计算操作。例如,在至少一个实施例中,处理集群阵列2112可以包括执行处理任务的逻辑,该处理任务包括对视频和/或音频数据的过滤,执行建模操作,包括物理操作以及执行数据转换。
在至少一个实施例中,处理集群阵列2112配置成执行并行图形处理操作。在至少一个实施例中,处理集群阵列2112可以包括附加逻辑以支持这种图形处理操作的执行,包括但不限于执行纹理操作的纹理采样逻辑,以及镶嵌逻辑和其他顶点处理逻辑。在至少一个实施例中,处理集群阵列2112可以配置成执行与图形处理有关的着色器程序,例如但不限于顶点着色器、曲面细分着色器、几何着色器和像素着色器。在至少一个实施例中,并行处理单元2102可以经由I/O单元2104从系统存储器传送数据以进行处理。在至少一个实施例中,在处理期间,可以在处理期间将传送的数据存储到片上存储器(例如,并行处理器存储器2122),然后将其写回到系统存储器。
在至少一个实施例中,当并行处理单元2102用于执行图形处理时,调度器2110可以配置成将处理工作负载划分为近似相等大小的任务,以更好地将图形处理操作分配给处理集群阵列2112的多个集群2114A-2114N。在至少一个实施例中,处理集群阵列2112的部分可以配置成执行不同类型的处理。例如,在至少一个实施例中,第一部分可以配置成执行顶点着色和拓扑生成,第二部分可以配置成执行镶嵌和几何着色,并且第三部分可以配置成执行像素着色或其他屏幕空间操作,以生成用于显示的渲染图像。在至少一个实施例中,可以将由集群2114A-2114N中的一个或更多个产生的中间数据存储在缓冲区中,以允许在集群2114A-2114N之间传输中间数据以进行进一步处理。
在至少一个实施例中,处理集群阵列2112可以经由调度器2110接收要执行的处理任务,该调度器2110从前端2108接收定义处理任务的命令。在至少一个实施例中,处理任务可以包括要被处理的数据的索引,例如表面(补丁)数据、原始数据、顶点数据和/或像素数据,以及状态参数和定义如何处理数据的命令(例如,要执行什么程序)。在至少一个实施例中,调度器2110可以配置成获取与任务相对应的索引,或者可以从前端2108接收索引。在至少一个实施例中,前端2108可以配置成确保在启动由传入命令缓冲区(例如,批处理缓冲区、推入缓冲区等)指定的工作负载之前,处理集群阵列2112配置成有效状态。
在至少一个实施例中,并行处理单元2102的一个或更多个实例中的每一个可以与并行处理器存储器2122耦合。在至少一个实施例中,可以经由存储器交叉开关2116访问并行处理器存储器2122,所述存储器交叉开关2116可以接收来自处理集群阵列2112以及I/O单元2104的存储器请求。在至少一个实施例中,存储器交叉开关2116可以经由存储器接口2118访问并行处理器存储器2122。在至少一个实施例中,存储器接口2118可以包括多个分区单元(例如,分区单元2120A、分区单元2120B到分区单元2120N),其可各自耦合至并行处理器存储器2122的一部分(例如,存储单元)。在至少一个实施例中,多个分区单元2120A-2120N为配置为等于存储单元的数量,使得第一分区单元2120A具有对应的第一存储器单元2124A,第二分区单元2120B具有对应的存储单元2124B,第N分区单元2120N具有对应的第N存储器单元2124N。在至少一个实施例中,分区单元2120A-2120N的数量可以不等于存储单元的数量。
在至少一个实施例中,存储器单元2124A-2124N可以包括各种类型的存储器设备,包括动态随机存取存储器(DRAM)或图形随机存取存储器,例如同步图形随机存取存储器(SGRAM),包括图形双倍数据速率(GDDR)存储器。在至少一个实施例中,存储器单元2124A-2124N还可包括3D堆叠存储器,包括但不限于高带宽存储器(HBM)。在至少一个实施例中,可以跨存储器单元2124A-2124N来存储诸如帧缓冲区或纹理映射的渲染目标,从而允许分区单元2120A-2120N并行地写入每个渲染目标的部分,以有效地使用并行处理器存储器2122的可用带宽。在至少一个实施例中,可以排除并行处理器存储器2122的本地实例,以有利于利用系统存储器与本地高速缓存存储器结合的统一存储器设计。
在至少一个实施例中,处理集群阵列2112的集群2114A-2114N中的任何一个都可以处理将被写入并行处理器存储器2122内的任何存储器单元2124A-2124N中的数据。在至少一个实施例中,存储器交叉开关2116可以配置为将每个集群2114A-2114N的输出传输到任何分区单元2120A-2120N或另一个集群2114A-2114N,集群2114A-2114N可以对输出执行其他处理操作。在至少一个实施例中,每个集群2114A-2114N可以通过存储器交叉开关2116与存储器接口2118通信,以从各种外部存储设备读取或写入各种外部存储设备。在至少一个实施例中,存储器交叉开关2116具有到存储器接口2118的连接以与I/O单元2104通信,以及到并行处理器存储器2122的本地实例的连接,从而使不同处理集群2114A-2114N内的处理单元与系统存储器或不是并行处理单元2102本地的其他存储器进行通信。在至少一个实施例中,存储器交叉开关2116可以使用虚拟通道来分离集群2114A-2114N和分区单元2120A-2120N之间的业务流。
在至少一个实施例中,可以在单个插入卡上提供并行处理单元2102的多个实例,或者可以将多个插入卡互连。在至少一个实施例中,并行处理单元2102的不同实例可以配置成相互操作,即使不同实例具有不同数量的处理核心,不同数量的本地并行处理器存储器和/或其他配置差异。例如,在至少一个实施例中,并行处理单元2102的一些实例可以包括相对于其他实例而言更高精度的浮点单元。在至少一个实施例中,结合并行处理单元2102或并行处理器2100的一个或更多个实例的系统可以以各种配置和形式因素来实现,包括但不限于台式机、膝上型计算机或手持式个人计算机、服务器、工作站、游戏机和/或嵌入式系统。
图21B是根据至少一个实施例的分区单元2120的框图。在至少一个实施例中,分区单元2120是图21A的分区单元2120A-2120N之一的实例。在至少一个实施例中,分区单元2120包括L2高速缓存2121、帧缓冲区接口2125和光栅操作单元(“ROP”)2126。在至少一个实施例中,L2高速缓存2121是读/写高速缓存,其配置成执行从存储器交叉开关2116和ROP2126接收的加载和存储操作。在至少一个实施例中,L2高速缓存2121将读取未命中和紧急回写请求输出到帧缓冲区接口2125以进行处理。在至少一个实施例中,还可以经由帧缓冲区接口2125将更新发送到帧缓冲区以进行处理。在至少一个实施例中,帧缓冲区接口2125与并行处理器存储器中的存储器单元(诸如图21的存储器单元2124A-2124N(例如,在并行处理器存储器2122内))之一相互作用。
在至少一个实施例中,ROP 2126是一种处理单元,其执行光栅操作,诸如模版、z测试、混合等。在至少一个实施例中,ROP 2126然后输出存储在图形存储器中的处理后的图形数据。在至少一个实施例中,ROP 2126包括压缩逻辑以压缩被写入存储器的深度或颜色数据并解压缩从存储器读取的深度或颜色数据。在至少一个实施例中,压缩逻辑可以是利用多种压缩算法中的一种或更多种的无损压缩逻辑。在至少一个实施例中,ROP2126执行的压缩的类型可以基于要压缩的数据的统计特性而变化。例如,在至少一个实施例中,基于每图块基础上的深度和颜色数据执行增量颜色压缩。
在至少一个实施例中,ROP 2126包括在每个处理集群内(例如,图21的集群2114A-2114N),而不是在分区单元2120内。在至少一个实施例中,通过存储器交叉开关2116而不是像素片段数据传输对像素数据的读取和写入请求。在至少一个实施例中,经处理的图形数据可以在显示设备上(诸如图20的一个或更多个显示设备2010之一)显示,由处理器2702路由以供进一步处理,或者由图21A的并行处理器2100内的处理实体之一路由以供进一步处理。
图21C是根据至少一个实施例的并行处理单元内的处理集群2114的框图。在至少一个实施例中,处理集群是图21的处理集群2114A-2114N之一的实例。在至少一个实施例中,一个或更多个处理集群2114中的一个或更多个可以配置成并行执行许多线程,其中“线程”是指在特定的一组输入数据上执行的特定程序的实例。在至少一个实施例中,单指令多数据(SIMD)指令发布技术用于支持大量线程的并行执行而无需提供多个独立的指令单元。在至少一个实施例中,使用单指令多线程(SIMT)技术来支持并行执行大量一般同步的线程,这使用了公共指令单元,该公共指令单元配置成向每个处理集群内的一组处理引擎发出指令。
在至少一个实施例中,可以通过将处理任务分配给SIMT并行处理器的管线管理器2132来控制处理集群2114的操作。在至少一个实施例中,管线管理器2132从图21的调度器2110接收指令,通过图形多处理器2134和/或纹理单元2136管理这些指令的执行。在至少一个实施例中,图形多处理器2134是SIMT并行处理器的示例性实例。然而,在至少一个实施例中,处理集群2114内可以包括不同架构的各种类型的SIMT并行处理器。在至少一个实施例中,在处理集群2114内可以包括图形多处理器2134的一个或更多个实例。在至少一个实施例中,图形多处理器2134可以处理数据,并且数据交叉开关2140可以用于将处理后的数据分发到多个可能的目的(包括其他着色器单元)地之一。在至少一个实施例中,管线管理器2132可以通过指定要针对数据交叉开关2140分配的处理数据的目的地来促进处理数据的分配。
在至少一个实施例中,处理集群2114内的每个图形多处理器2134可以包括相同的一组功能执行逻辑(例如,算术逻辑单元、负载存储单元等)。在至少一个实施例中,可以以管线方式配置功能执行逻辑,其中可以在先前的指令完成之前发出新的指令。在至少一个实施例中,功能执行逻辑支持多种操作,包括整数和浮点算术、比较操作、布尔运算、移位和各种代数函数的计算。在至少一个实施例中,可以利用相同的功能单元硬件来执行不同的操作,并且可以存在功能单元的任何组合。
在至少一个实施例中,传送到处理集群2114的指令构成线程。在至少一个实施例中,跨一组并行处理引擎执行的一组线程是线程组。在至少一个实施例中,线程组在不同的输入数据上执行共同的程序。在至少一个实施例中,线程组内的每个线程可被分配给图形多处理器2134内的不同处理引擎。在至少一个实施例中,线程组可包括比图形多处理器2134内的多个处理引擎更少的线程。在至少一个实施例中,当线程组包括的线程数少于处理引擎的数量时,一个或更多个处理引擎在正在处理该线程组的循环期间可能是空闲的。在至少一个实施例中,线程组还可以包括比图形多处理器2134内的多个处理引擎更多的线程。在至少一个实施例中,当线程组包括比图形多处理器2134内的处理引擎更多的线程时,可以在连续的时钟周期内执行处理。在至少一个实施例中,可以在图形多处理器2134上同时执行多个线程组。
在至少一个实施例中,图形多处理器2134包括内部高速缓存存储器,以执行加载和存储操作。在至少一个实施例中,图形多处理器2134可以放弃内部高速缓存并使用处理集群2114内的高速缓存存储器(例如,L1高速缓存2148)。在至少一个实施例中,每个图形多处理器2134还可以访问分区单元(例如,图21的分区单元2120A-2120N)内的L2高速缓存,这些分区单元在所有处理集群2114之间共享并且可以用于在线程之间传输数据。在至少一个实施例中,图形多处理器2134还可以访问片外全局存储器,其可以包括本地并行处理器存储器和/或系统存储器中的一个或更多个。在至少一个实施例中,并行处理单元2102外部的任何存储器都可以用作全局存储器。在至少一个实施例中,处理集群2114包括图形多处理器2134的多个实例并共享可以存储在L1高速缓存2148中的公共指令和数据。
在至少一个实施例中,每个处理集群2114可以包括配置成将虚拟地址映射为物理地址的存储器管理单元(“MMU”)2145。在至少一个实施例中,MMU 2845的一个或更多个实例可以驻留在图28的存储器接口2818内。在至少一个实施例中,MMU 2845包括一组页表条目(PTE),其用于将虚拟地址映射到图块的物理地址以及可选地映射到高速缓存存储器行。在至少一个实施例中,MMU 2145可以包括地址转换后备缓冲区(TLB)或可以驻留在图形多处理器2134或L1高速缓存或处理集群2114内的高速缓存。在至少一个实施例中,处理物理地址以分配表面数据访问局部性,以便在分区单元之间进行有效的请求交织。在至少一个实施例中,高速缓存行索引可以用于确定对高速缓存行的请求是命中还是未命中。
在至少一个实施例中,可以配置处理集群2114,使得每个图形多处理器2134耦合到纹理单元2136,以执行纹理映射操作,例如,确定纹理样本位置、读取纹理数据以及过滤纹理数据。在至少一个实施例中,根据需要从内部纹理L1高速缓存(未示出)或从图形多处理器2134内的L1高速缓存中读取纹理数据,并从L2高速缓存、本地并行处理器存储器或系统存储器中获取纹理数据。在至少一个实施例中,每个图形多处理器2134将处理后的任务输出到数据交叉开关2140,以将处理后的任务提供给另一处理集群2114以进行进一步处理或将处理后的任务存储在L2高速缓存、本地并行处理器存储器、或经由存储器交叉开关2116的系统存储器中。在至少一个实施例中,preROP 2142(光栅前操作单元)配置成从图形多处理器2134接收数据,将数据引导至ROP单元,该ROP单元可以与本文所述的分区单元(例如,图21的分区单元2120A-2120N)一起定位。在至少一个实施例中,PreROP 2142单元可以执行用于颜色混合的优化、组织像素颜色数据以及执行地址转换。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815可以在图形处理集群2114中使用,用于至少部分地基于使用本文描述的神经网络训练操作、神经网络功能和/或架构或神经网络用例计算的权重参数来进行推理或预测操作。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图21D示出了根据至少一个实施例的图形多处理器2134。在至少一个实施例中,图形多处理器2134与处理集群2114的管线管理器2132耦合。在至少一个实施例中,图形多处理器2134具有执行管线,该执行管线包括但不限于指令高速缓存2152、指令单元2154、地址映射单元2156、寄存器文件2158、一个或更多个通用图形处理单元(GPGPU)核心2162和一个或更多个加载/存储单元2166。在至少一个实施例中,GPGPU核心2162和加载/存储单元2166与高速缓存存储器2172和共享存储器2170通过存储器和高速缓存互连2168耦合。
在至少一个实施例中,指令高速缓存2152从管线管理器2132接收要执行的指令流。在至少一个实施例中,将指令高速缓存在指令高速缓存2152中并将其分派以供指令单元2154执行。在一个实施例中,指令单元2154可以分派指令作为线程组(例如,线程束),将每个线程组分配给GPGPU核心2162内的不同执行单元。在至少一个实施例中,指令可以通过在统一地址空间内指定地址来访问任何本地、共享或全局地址空间。在至少一个实施例中,地址映射单元2156可以用于将统一地址空间中的地址转换成可以由加载/存储单元2166访问的不同的存储器地址。
在至少一个实施例中,寄存器文件2158为图形多处理器2134的功能单元提供了一组寄存器。在至少一个实施例中,寄存器文件2158为连接到图形多处理器2134的功能单元(例如,GPGPU核心2162、加载/存储单元2166)的数据路径的操作数提供了临时存储。在至少一个实施例中,在每个功能单元之间划分寄存器文件2158,使得为每个功能单元分配寄存器文件2158的专用部分。在至少一个实施例中,寄存器文件2158在图形多处理器2134正在执行的不同线程束之间划分。
在至少一个实施例中,GPGPU核心2162可以各自包括用于执行图形多处理器2134的指令的浮点单元(FPU)和/或整数算术逻辑单元(ALU)。在至少一个实施例中,GPGPU核心2162在架构上可以相似或架构可能有所不同。在至少一个实施例中,GPGPU核心2162的第一部分包括单精度FPU和整数ALU,而GPGPU核心的第二部分包括双精度FPU。在至少一个实施例中,FPU可以实现用于浮点算法的IEEE 754-2108标准或启用可变精度浮点算法。在至少一个实施例中,图形多处理器2134可以另外包括一个或更多个固定功能或特殊功能单元,以执行特定功能,诸如复制矩形或像素混合操作。在至少一个实施例中,GPGPU核心中的一个或更多个也可以包括固定或特殊功能逻辑。
在至少一个实施例中,GPGPU核心2162包括能够对多组数据执行单个指令的SIMD逻辑。在至少一个实施例中,GPGPU核心2162可以物理地执行SIMD4、SIMD8和SIMD16指令,并且在逻辑上执行SIMD1、SIMD2和SIMD32指令。在至少一个实施例中,用于GPGPU核心的SIMD指令可以在编译时由着色器编译器生成,或者在执行针对单程序多数据(SPMD)或SIMT架构编写和编译的程序时自动生成。在至少一个实施例中,可以通过单个SIMD指令来执行为SIMT执行模型配置的程序的多个线程。例如,在至少一个实施例中,可以通过单个SIMD8逻辑单元并行执行执行相同或相似操作的八个SIMT线程。
在至少一个实施例中,存储器和高速缓存互连2168是将图形多处理器2134的每个功能单元连接到寄存器文件2158和共享存储器2170的互连网络。在至少一个实施例中,存储器和高速缓存互连2168是交叉开关互连,其允许加载/存储单元2166在共享存储器2170和寄存器文件2158之间实现加载和存储操作。在至少一个实施例中,寄存器文件2158可以以与GPGPU核心2162相同的频率操作,从而在GPGPU核心2162和寄存器文件2158之间进行数据传输的延迟非常低。在至少一个实施例中,共享存储器2170可以用于启用在图形多处理器2134内的功能单元上执行的线程之间的通信。在至少一个实施例中,高速缓存存储器2172可以用作例如数据高速缓存,以高速缓存在功能单元和纹理单元2136之间通信的纹理数据。在至少一个实施例中,共享存储器2170也可以用作程序管理的高速缓存。在至少一个实施例中,除了存储在高速缓存存储器2172中的自动高速缓存的数据之外,在GPGPU核心2162上执行的线程还可以以编程方式将数据存储在共享存储器中。
在至少一个实施例中,如本文所述的并行处理器或GPGPU通信地耦合到主机/处理器核心,以加速图形操作、机器学习操作、图案分析操作以及各种通用GPU(GPGPU)功能。在至少一个实施例中,GPU可以通过总线或其他互连(例如,诸如PCIe或NVLink的高速互连)通信地耦合到主机处理器/核心。在至少一个实施例中,GPU可以与核心集成在封装或芯片上,并通过内部处理器总线/互连(封装或芯片内部的)通信地耦合到核心。在至少一个实施例中,不管GPU连接的方式如何,处理器核心可以以工作描述符中包含的命令/指令序列的形式向GPU分配工作。在至少一个实施例中,GPU然后使用专用电路/逻辑来有效地处理这些命令/指令。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815可以在图形多处理器2134中用于至少部分地基于使用本文描述的神经网络训练操作、神经网络功能和/或架构或神经网络用例计算的权重参数来进行推理或预测操作。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图22示出了根据至少一个实施例的多GPU计算系统2200。在至少一个实施例中,多GPU计算系统2200可以包括经由主机接口开关2204耦合到多个通用图形处理单元(GPGPU)2206A-D的处理器2202。在至少一个实施例中,主机接口开关2204是将处理器2202耦合到PCI快速(express)总线的PCI快速交换设备,处理器2202可以通过PCI快速总线与GPGPU2206A-D通信。在至少一个实施例中,GPGPU 2206A-D可以经由一组高速点对点GPU到GPU链路2216互连。在至少一个实施例中,GPU到GPU链路2216经由专用GPU链路连接到每个GPGPU2206A-D。在至少一个实施例中,P2P GPU链路2216使得能够在每个GPGPU2206A-D之间进行直接通信,而无需通过处理器2202所连接的主机接口总线2204进行通信。在至少一个实施例中,在GPU到GPU业务被定向到P2P GPU链路2216的情况下,主机接口总线2204保持可用于系统存储器访问或例如经由一个或更多个网络设备与多GPU计算系统2200的其他实例通信。尽管在至少一个实施例中,GPGPU 2206A-D经由主机接口开关2204连接到处理器2202,但是在至少一个实施例中,处理器2202包括对P2P GPU链接2216的直接支持,并且可以直接连接到GPGPU 2206A-D。
推理和/或训练逻辑815用于执行与一个或多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815可以在多GPU计算系统2200中用于至少部分地基于使用本文描述的神经网络训练操作、神经网络功能和/或架构或神经网络用例计算的权重参数来进行推理或预测操作。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图23是根据至少一个实施例的图形处理器2300的框图。在至少一个实施例中,图形处理器2300包括环形互连2302、管线前端2304、媒体引擎2337和图形核心2380A-2380N。在至少一个实施例中,环形互连2302将图形处理器2300耦合到其他处理单元,包括其他图形处理器或一个或更多个通用处理器核心。在至少一个实施例中,图形处理器2300是集成在多核处理系统内的许多处理器之一。
在至少一个实施例中,图形处理器2300经由环形互连2302接收数批命令。在至少一个实施例中,输入命令由管线前端2304中的命令流化器2303解释。在至少一个实施例中,图形处理器2300包括可扩展执行逻辑,以经由图形核心2380A-2380N执行3D几何处理和媒体处理。在至少一个实施例中,对于3D几何处理命令,命令流化器2303将命令提供给几何管线2336。在至少一个实施例中,对于至少一些媒体处理命令,命令流化器2303将命令提供给视频前端2334,其耦合有媒体引擎2337。在至少一个实施例中,媒体引擎2337包括用于视频和图像后处理的视频质量引擎(VQE)2323,以及用于提供硬件加速媒体数据编码和解码的多格式编码/解码(MFX)2333引擎。在至少一个实施例中,几何管线2336和媒体引擎2337各自生成用于由至少一个图形核心2380A提供的线程执行资源的执行线程。
在至少一个实施例中,图形处理器2300包括在模块化核心2380A-2380N(有时称为核心片)中起重要作用的可伸缩线程执行资源,每个模块化核心具有多个子核心2350A-550N,2360A-2360N(有时称为核心子片)。在至少一个实施例中,图形处理器2300可以具有任意数量的图形核心2380A至2380N。在至少一个实施例中,图形处理器2300包括具有至少第一子核心2350A和第二子核心2360A的图形核心2380A。在至少一个实施例中,图形处理器2300是具有单个子核心(例如2350A)的低功率处理器。在至少一个实施例中,图形处理器2300包括多个图形核心2380A-2380N,每个图形核心包括一组第一子核心2350A-2350N和一组第二子核心2360A-2360N。在至少一个实施例中,第一子核心2350A-2350N中的每个子核心至少包括第一组执行单元2352A-2352N和媒体/纹理采样器2354A-2354N。在至少一个实施例中,第二子核心2360A-2360N中的每个子核心至少包括第二组执行单元2362A-2362N和采样器2364A-2364N。在至少一个实施例中,每个子核心2350A-2350N,2360A-2360N共享一组共享资源2370A-2370N。在至少一个实施例中,共享资源包括共享高速缓冲存储器和像素操作逻辑。
推理和/或训练逻辑815用于执行与一个或多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815可以在图形处理器2300中用于至少部分地基于使用本文描述的神经网络训练操作、神经网络功能和/或架构或神经网络用例计算的权重参数来进行推理或预测操作。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图24是示出根据至少一个实施例的用于处理器2400的微架构的框图,该处理器2400可以包括执行指令的逻辑电路。在至少一个实施例中,处理器2400可以执行指令,包括x86指令、ARM指令、用于专用集成电路(ASIC)的专用指令等。在至少一个实施例中,处理器2400可以包括用于存储封装数据的寄存器,例如作为加利福尼亚州圣克拉拉市英特尔公司采用MMX技术启用的微处理器中的64位宽MMX
在至少一个实施例中,处理器2400包括有序前端(“前端”)2401,以提取要执行的指令并准备稍后在处理器管线中使用的指令。在至少一个实施例中,前端2401可以包括几个单元。在至少一个实施例中,指令预取器2426从存储器中获取指令并将指令提供给指令解码器2428,指令解码器2428又对指令进行解码或解释。例如,在至少一个实施例中,指令解码器2428将接收到的指令解码为机器可执行的所谓的“微指令”或“微操作”(也称为“微操作”或“微指令”)的一个或更多个操作。在至少一个实施例中,指令解码器2428将指令解析为操作码以及相应的数据和控制字段,其可以由微架构用来使用以根据至少一个实施例来执行操作。在至少一个实施例中,追踪高速缓存2430可以将解码的微指令组装成微指令队列2434中的程序排序的序列或追踪以供执行。在至少一个实施例中,当追踪高速缓存2430遇到复杂指令时,微码ROM 2432提供完成操作所需的微指令。
在至少一个实施例中,可以将一些指令转换成单个微操作,而另一些指令则需要几个微操作来完成全部操作。在至少一个实施例中,如果需要多于四个的微指令来完成一条指令,则指令解码器2428可以访问微码ROM 2432以执行指令。在至少一个实施例中,可以将指令解码为少量的微指令以在指令解码器2428处进行处理。在至少一个实施例中,如果需要多个微指令完成操作,则可以将指令存储在微码ROM 2432中。在至少一个实施例中,追踪高速缓存器2430参考入口点可编程逻辑阵列(“PLA”)以确定正确的微指令指针,用于根据至少一个实施例从微码ROM 2432读取微码序列以完成一个或更多个指令。在至少一个实施例中,在微码ROM 2432完成对指令的微操作排序之后,机器的前端2401可以恢复从追踪高速缓存2430获取微操作。
在至少一个实施例中,乱序执行引擎(“乱序引擎”)2403可以准备用于执行的指令。在至少一个实施例中,乱序执行逻辑具有多个缓冲区,以使指令流平滑并重新排序,以在指令沿管线下降并被调度执行时优化性能。在至少一个实施例中,乱序执行引擎2403包括但不限于分配器/寄存器重命名器2440、存储器微指令队列2442、整数/浮点微指令队列2444、存储器调度器2446、快速调度器2402、慢速/通用浮点调度器(“慢速/通用FP调度器”)2404和简单浮点调度器(“简单FP调度器”)2406。在至少一个实施例中,快速调度器2402、慢速/通用浮点调度器2404和简单浮点调度器2406也统称为“微指令调度器2402、2404、2406”。在至少一个实施例中,分配器/寄存器重命名器2440分配每个微指令按顺序执行所需要的机器缓冲区和资源。在至少一个实施例中,分配器/寄存器重命名器2440将逻辑寄存器重命名为寄存器文件中的条目。在至少一个实施例中,分配器/寄存器重命名器2440还为两个微指令队列之一中的每个微指令分配条目,存储器微指令队列2442用于存储器操作和整数/浮点微指令队列2444用于非存储器操作,在存储器调度器2446和微指令调度器2402、2404、2406的前面。在至少一个实施例中,微指令调度器2402、2404、2406基于它们的从属输入寄存器操作数源的就绪性和需要完成的执行资源微指令的可用性来确定何时准备好执行微指令。在至少一个实施例中,快速调度器2402可以在主时钟周期的每个一半上调度,而慢速/通用浮点调度器2404和简单浮点调度器2406可以在每个主处理器时钟周期调度一次。在至少一个实施例中,微指令调度器2402、2404、2406对调度端口进行仲裁,以调度用于执行的微指令。
在至少一个实施例中,执行块b11包括但不限于整数寄存器文件/支路网络2408、浮点寄存器文件/支路网络(“FP寄存器文件/支路网络”)2410、地址生成单元(“AGU”)2412和2414、快速算术逻辑单元(“快速ALU”)2416和2418、慢速算术逻辑单元(“慢速ALU”)2420、浮点ALU(“FP”)2422和浮点移动单元(“FP移动”)2424。在至少一个实施例中,整数寄存器文件/支路网络2408和浮点寄存器文件/旁路网络2410在本文中也称为“寄存器文件2408、2410”。在至少一个实施例中,AGU 2412和2414、快速ALU 2416和2418、慢速ALU 2420、浮点ALU 2422和浮点移动单元2424在本文中也称为“执行单元2412、2414、2416、2418、2420、2422和2424”。在至少一个实施例中,执行块b11可以包括但不限于任意数量(包括零)和类型的寄存器文件、支路网络、地址生成单元和执行单元(以任何组合)。
在至少一个实施例中,寄存器网络2408、2410可以布置在微指令调度器2402、2404、2406与执行单元2412、2414、2416、2418、2420、2422和2424之间。在至少一个实施例中,整数寄存器文件/支路网络2408执行整数运算。在至少一个实施例中,浮点寄存器文件/支路网络2410执行浮点操作。在至少一个实施例中,寄存器网络2408、2410中的每一个可以包括但不限于支路网络,该支路网络可以绕过或转发尚未写入寄存器文件中的刚刚完成的结果到新的从属对象。在至少一个实施例中,寄存器网络2408、2410可以彼此通信数据。在至少一个实施例中,整数寄存器文件/支路网络2408可以包括但不限于两个单独的寄存器文件、一个寄存器文件用于低阶32位数据,第二寄存器文件用于高阶32位数据。在至少一个实施例中,浮点寄存器文件/支路网络2410可以包括但不限于128位宽的条目,因为浮点指令通常具有宽度为64至128位的操作数。
在至少一个实施例中,执行单元2412、2414、2416、2418、2420、2422、2424可以执行指令。在至少一个实施例中,寄存器网络2408、2410存储微指令需要执行的整数和浮点数据操作数值。在至少一个实施例中,处理器2400可以包括但不限于任何数量的执行单元2412、2414、2416、2418、2420、2422、2424及其组合。在至少一个实施例中,浮点ALU 2422和浮点移动单元2424,可以执行浮点、MMX、SIMD、AVX和SSE或其他操作,包括专门的机器学习指令。在至少一个实施例中,浮点ALU 2422可以包括但不限于64位乘64位浮点除法器,以执行除法、平方根和余数微操作。在至少一个实施例中,可以用浮点硬件来处理涉及浮点值的指令。在至少一个实施例中,可以将ALU操作传递给快速ALU 2416、2418。在至少一个实施例中,快速ALUS 2416、2418可以以半个时钟周期的有效延迟执行快速操作。在至少一个实施例中,大多数复杂的整数运算进入慢速ALU 2420,因为慢速ALU 2420可以包括但不限于用于长延迟类型操作的整数执行硬件,例如乘法器、移位、标志逻辑和分支处理。在至少一个实施例中,存储器加载/存储操作可以由AGUS 2412、2414执行。在至少一个实施例中,快速ALU 2416、快速ALU 2418和慢速ALU 2420可以对64位数据操作数执行整数运算。在至少一个实施例中,可以实现快速ALU 2416、快速ALU 2418和慢速ALU 2420以支持包括十六、三十二、128、256等的各种数据位大小。在至少一个实施例中,浮点ALU 2422和浮点移动单元2424可以实现为支持具有各种宽度的位的一定范围的操作数,如结合SIMD和多媒体指令的128位宽封装数据操作数。
在至少一个实施例中,微指令调度器2402、2404、2406在父加载完成执行之前调度从属操作。在至少一个实施例中,由于可以在处理器2400中推测性地调度和执行微指令,处理器2400还可以包括用于处理存储器未命中的逻辑。在至少一个实施例中,如果数据高速缓存中的数据加载未命中,则可能存在在管线中正在运行的从属操作,其使调度器暂时没有正确的数据。在至少一个实施例中,一种重放机制追踪踪并重新执行使用不正确数据的指令。在至少一个实施例中,可能需要重放从属操作并且可以允许完成独立操作。在至少一个实施例中,处理器的至少一个实施例的调度器和重放机制也可以设计为捕获用于文本串比较操作的指令序列。
在至少一个实施例中,术语“寄存器”可以指代可以用作识别操作数的指令的一部分的机载处理器存储位置。在至少一个实施例中,寄存器可以是那些可以从处理器外部使用的寄存器(从程序员的角度来看)。在至少一个实施例中,寄存器可能不限于特定类型的电路。相反,在至少一个实施例中,寄存器可以存储数据、提供数据并执行本文描述的功能。在至少一个实施例中,本文描述的寄存器可以通过处理器内的电路使用多种不同技术来实现,例如专用物理寄存器、使用寄存器重命名动态分配的物理寄存器、专用和动态分配的物理寄存器的组合等。在至少一个实施例中,整数寄存器存储32位整数数据。至少一个实施例的寄存器文件还包含八个用于封装数据的多媒体SIMD寄存器。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,可以将推理和/或训练逻辑815的部分或全部并入执行块2411以及示出或未示出的其他存储器或寄存器。例如,在至少一个实施例中,本文描述的训练和/或推理技术可以使用执行块2411中示出的一个或更多个ALU。此外,权重参数可以存储在片上或片外存储器和/或寄存器(示出或未示出)中,该寄存器和/或寄存器配置执行块2411的ALU以执行一种或更多种本文所述的机器学习算法、神经网络架构、用例或训练技术。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图25示出了根据至少一个实施例的深度学习应用处理器2500。在至少一个实施例中,深度学习应用处理器2500使用指令,如果由深度学习应用处理器2500执行,则指令使深度学习应用处理器2500执行贯穿本公开描述的一些或全部过程和技术。在至少一个实施例中,深度学习应用处理器2500是专用集成电路(ASIC)。在至少一个实施例中,应用处理器2500执行矩阵乘法运算或者“硬连线”到硬件中,作为执行一个或更多个指令或两者的结果。在至少一个实施例中,深度学习应用处理器2500包括但不限于处理集群2510(1)-2510(12)、芯片间链路(“ICL”)2520(1)-2520(12)、芯片间控制器(“ICC”)2530(1)-2530(2)、第二代高带宽存储器(“HBM2”)2540(1)-2540(4)、存储器控制器(“Mem Ctrlrs”)2542(1)-2542(4)、高带宽存储器物理层(“HBM PHY”)2544(1)-2544(4)、管理控制器中央处理单元(“管理控制器CPU”)2550、串行外围设备接口、内部集成电路和通用输入/输出块(“SPI、I2C、GPIO”)2560,外围组件互连快速控制器和直接存储器访问块(“PCIe控制器和DMA”)2570、以及十六通道外围组件互连快速端口(“PCI Express x 16”)2580。
在至少一个实施例中,处理集群2510可以执行深度学习操作,包括基于一种或更多种训练技术计算的权重参数的推理或预测操作,包括本文所述的那些技术。在至少一个实施例中,每个处理集群2510可以包括但不限于任何数量和类型的处理器。在至少一个实施例中,深度学习应用处理器2500可以包括任何数量和类型的处理集群2500。在至少一个实施例中,芯片间链路2520是双向的。在至少一个实施例中,芯片间链路2520和芯片间控制器2530使多个深度学习应用处理器2500能够交换信息,包括从执行一个或更多个神经网络中体现的一种或更多种机器学习算法而产生的激活信息。在至少一个实施例中,深度学习应用处理器2500可以包括任意数量(包括零)和类型的ICL 2520和ICC 2530。
在至少一个实施例中,HBM2 2540提供总共32GB的存储器。在至少一个实施例中,HBM2 2540(i)与存储器控制器2542(i)和HBM PHY2544(i)都相关联。在至少一个实施例中,任何数量的HBM2 2540可以提供任何类型和总量的高带宽存储器,并且可以与任何数量(包括零)和类型的存储器控制器2542和HBM PHY 2544相关联。在至少一个实施例中,可以用任何数量和类型的块替换SPI、I2C、GPIO 2560、PCIe控制器和DMA 2570和/或PCIe2580,以任何技术上可行的方式实现任何数量和类型的通信标准。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,深度学习应用处理器用于训练机器学习模型(例如神经网络),以预测或推理提供给深度学习应用处理器2500的信息。在至少一个实施例中,深度学习应用处理器2500用于基于已经由另一处理器或系统或由深度学习应用处理器2500训练的经训练的机器学习模型(例如,神经网络)来推理或预测信息。在至少一个实施例中,处理器2500可以用于执行本文所述的一个或更多个神经网络用例。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图26是根据至少一个实施例的神经形态处理器2600的框图。在至少一个实施例中,神经形态处理器2600可以从神经形态处理器2600外部的源接收一个或更多个输入。在至少一个实施例中,这些输入可以被传输到神经形态处理器2600内的一个或更多个神经元2602。在至少一个实施例中,可以使用包括一个或更多个算术逻辑单元(ALU)的电路或逻辑来实现神经元2602及其组件。在至少一个实施例中,神经形态处理器2600可以包括但不限于成千上万个神经元2602的实例,但是可以使用任何合适数量的神经元2602。在至少一个实施例中,神经元2602的每个实例可以包括神经元输入2604和神经元输出2606。在至少一个实施例中,神经元2602可以生成可以传输到神经元2602的其他实例的输入的输出。在至少一个实施例中,神经元输入2604和神经元输出2606可以经由突触2608互连。
在至少一个实施例中,神经元2602和突触2608可以互连,使得神经形态处理器2600操作以处理或分析由神经形态处理器2600接收的信息。在至少一个实施例中,当通过神经元输入2604接收到的输入超过阈值时,神经元2602可以发送输出脉冲(或“触发”或“峰值”)。在至少一个实施例中,神经元2602可以对在神经元输入2604处接收到的信号进行求和或积分。例如,在至少一个实施例中,神经元2602可以实现为有泄漏的积分-触发神经元,其中如果求和(称为“膜电位”)超过阈值,则神经元2602可以使用诸如sigmoid或阈值函数的传递函数来产生输出(或“触发”)。在至少一个实施例中,泄漏的积分-触发神经元可以将在神经元输入2604处接收到的信号求和成膜电位,并且可以应用衰减因子(或泄漏)以减小膜电位。在至少一个实施例中,如果在神经元输入2604处接收到足够快以超过阈值的多个输入信号(即,在膜电势衰减得太低而不能触发之前),则泄漏的积分-触发神经元可能会触发。在至少一个实施例中,神经元2602可以使用接收输入、将输入积分到膜电位、并衰减膜电位的电路或逻辑来实现。在至少一个实施例中,可以对输入求平均,或者可以使用任何其他合适的传递函数。此外,在至少一个实施例中,神经元2602可以包括但不限于当将传递函数应用于神经元输入2604的结果超过阈值时在神经元输出2606处产生输出尖峰的比较器电路或逻辑。在至少一个实施例中,一旦神经元2602触发,它可以通过例如将膜电位复位为0或另一合适的默认值来忽略先前接收的输入信息。在至少一个实施例中,一旦膜电位被重置为0,则神经元2602可以在合适的时间段(或修复期)之后恢复正常操作。
在至少一个实施例中,神经元2602可以通过突触2608互连。在至少一个实施例中,突触2608可以操作以将从第一神经元2602的输出的信号传输到第二神经元2602的输入。在至少一个实施例中,神经元2602可以在一个以上的突触2608实例上传输信息。在至少一个实施例中,神经元输出2606的一个或更多个实例可以通过突触2608的实例连接到同一神经元2602中神经元输入2604的实例。在至少一个实施例中,相对于突触2608的那个实例,神经元2602的实例产生要在突触2608的实例上传输的输出可以被称为“突触前神经元”。在至少一个实施例中,相对于突触2608的实例,神经元2602的实例接收通过突触2608的实例传输的输入可以被称为“突触后神经元”。在至少一个实施例中,关于突触2608的各种实例,因为神经元2602的实例可以接收来自一个或更多个突触2608实例的输入,并且还可以通过一个或更多个突触2608实例传输输出,因此神经元2602的单个实例可以既是“突触前神经元”又是“突触后神经元”。
在至少一个实施例中,神经元2602可以被组织成一层或更多层。在至少一个实施例中,神经元2602的每个实例可以具有一个神经元输出2606,该神经元输出2606可以通过一个或更多个突触2608扇出到一个或更多个神经元输入2604。在至少一个实施例中,第一层2610中的神经元2602的神经元输出2606可以连接到第二层2612中的神经元2602的神经元输入2604。在至少一个实施例中,层2610可以被称为“前馈层”。在至少一个实施例中,在第一层2610的实例中神经元2602的每个实例可以扇出到第二层2612中的神经元2602的每个实例。在至少一个实施例中,第一层2610可以被称为“完全连接的前馈层”。在至少一个实施例中,在第二层2612的每个实例中的神经元2602的每个实例扇出到少于在第三层2614中的神经元2602的所有实例。在至少一个实施例中,第二层2612可以被称为“稀疏连接的前馈层”。在至少一个实施例中,第二层2612中的神经元2602可以扇出到多个其他层中的神经元2602,也包括第二层2612中的神经元2602。在至少一个实施例中,第二层2612可以被称为“循环层”。在至少一个实施例中,神经形态处理器2600可以包括但不限于循环层和前馈层的任何合适的组合,包括但不限于稀疏连接的前馈层和完全连接的前馈层。
在至少一个实施例中,神经形态处理器2600可以包括但不限于可重新配置的互连架构或专用硬连线互连,以将突触2608连接到神经元2602。在至少一个实施例中,神经形态处理器2600可以包括但不限于电路或逻辑,其根据神经网络拓扑结构和神经元扇入/扇出,允许根据需要将突触分配给不同神经元2602。例如,在至少一个实施例中,可以使用互连结构(诸如片上网络)或通过专用连接将突触2608连接到神经元2602。在至少一个实施例中,可以使用电路或逻辑来实现突触互连及其组件
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图27是根据至少一个实施例的处理系统的框图。在至少一个实施例中,系统2700包括一个或更多个处理器2702和一个或更多个图形处理器2708,并且可以是单处理器台式机系统,多处理器工作站系统或具有大量处理器2702或处理器核心2707的服务器系统。在至少一个实施例中,系统2700是结合在片上系统(SoC)集成电路内的处理平台,用于在移动、手持或嵌入式设备中使用。
在至少一个实施例中,系统2700可以包括或结合在基于服务器的游戏平台中,包括游戏和媒体控制台、移动游戏控制台、手持游戏控制台或在线游戏控制台的游戏控制台。在至少一个实施例中,系统2700是移动电话、智能电话、平板计算设备或移动互联网设备。在至少一个实施例中,处理系统2700还可包括可穿戴设备,与可穿戴设备耦合或集成在可穿戴设备中,可穿戴设备例如智能手表可穿戴设备、智能眼镜设备、增强现实设备或虚拟现实设备。在至少一个实施例中,处理系统2700是电视或机顶盒设备,其具有一个或更多个处理器2702以及由一个或更多个图形处理器2708生成的图形界面。
在至少一个实施例中,一个或更多个处理器2702各自包括一个或更多个处理器核心2707,以处理指令,这些指令在被执行时执行针对系统和用户软件的操作。在至少一个实施例中,一个或更多个处理器核心2707中的每一个被配置为处理特定指令序列2709。在至少一个实施例中,指令集2709可以促进复杂指令集计算(CISC)、精简指令集计算(RISC)、或通过超长指令字(VLIW)进行计算。在至少一个实施例中,处理器核心2707每个可以处理不同的指令序列2709,该指令序列2709可以包括促进对其他指令序列进行仿真的指令。在至少一个实施例中,处理器核心2707还可以包括其他处理设备,例如数字信号处理器(DSP)。
在至少一个实施例中,处理器2702包括高速缓冲存储器2704。在至少一个实施例中,处理器2702可以具有单个内部高速缓存或多个级别的内部高速缓存。在至少一个实施例中,高速缓冲存储器在处理器2702的各个组件之间共享。在至少一个实施例中,处理器2702还使用外部高速缓存(例如,三级(L3)高速缓存或最后一级高速缓存(LLC))(未示出),外部高速缓存可以使用已知的高速缓存一致性技术在处理器内核2707之间共享该处理器。在至少一个实施例中,寄存器文件2706另外包括在处理器2702中,该处理器文件可以包括用于存储不同类型的数据的不同类型的寄存器(例如,整数寄存器、浮点寄存器、状态寄存器和指令指针寄存器)。在至少一个实施例中,寄存器堆2706可以包括通用寄存器或其他寄存器。
在至少一个实施例中,一个或更多个处理器2702与一个或更多个接口总线2710耦合,以在处理器2702与系统2700中的其他组件之间传输通信信号,例如地址、数据或控制信号。在至少一个实施例中,接口总线2710可以是处理器总线,例如直接媒体接口(DMI)总线的版本。在至少一个实施例中,接口2710不限于DMI总线,并且可以包括一个或更多个外围组件互连总线(例如,PCI、PCI快速)、存储器总线或其他类型的接口总线。在至少一个实施例中,处理器2702包括集成存储器控制器2716和平台控制器集线器2730。在至少一个实施例中,存储器控制器2716促进存储器设备与系统2700的其他组件之间的通信,而平台控制器集线器(PCH)2730通过本地I/O总线提供到I/O设备的连接。
在至少一个实施例中,存储器设备2720可以是动态随机存取存储器(DRAM)设备、静态随机存取存储器(SRAM)设备、闪存设备、相变存储器设备或具有适当的性能的一切其他存储器设备以用作进程存储器。在至少一个实施例中,存储器设备2720可以用作系统2700的系统存储器,以存储在一个或多个处理器2702执行应用或处理时使用的数据2722和指令2721。在至少一个实施例中,存储器控制器2716还与可选的外部图形处理器2712耦合,该外部图形处理器2712可以与处理器2702中的一个或更多个图形处理器2708通信以执行图形和媒体操作。在至少一个实施例中,显示设备2711可以连接至处理器2702。在至少一个实施例中,显示设备2711可以包括例如在移动电子设备或膝上型计算机设备或便携式计算机中的内部显示设备或通过显示接口(例如DisplayPort等)连接的外部显示设备中的一个或更多个。在至少一个实施例中,显示设备2711可以包括头戴式显示器(HMD),诸如用于虚拟现实(VR)应用或增强现实(AR)应用的立体显示设备。
在至少一个实施例中,平台控制器集线器2730使外围设备能够通过高速I/O总线连接到存储设备2720和处理器2702。在至少一个实施例中,I/O外围设备包括但不限于音频控制器2746、网络控制器2734、固件接口2728、无线收发器2726、触摸传感器2725、数据存储设备2724(例如,硬盘驱动器、闪存等)。在至少一个实施例中,数据存储设备2724可以经由存储接口(例如,SATA)或经由诸如外围部件互连总线(例如,PCI,PCI快速)的外围总线来连接。在至少一个实施例中,触摸传感器2725可以包括触摸屏传感器、压力传感器或指纹传感器。在至少一个实施例中,无线收发器2726可以是Wi-Fi收发器、蓝牙收发器或诸如3G、4G或长期演进(LTE)收发器的移动网络收发器。在至少一个实施例中,固件接口2728使能与系统固件的通信,并且可以是例如统一的可扩展固件接口(UEFI)。在至少一个实施例中,网络控制器2734可以启用到有线网络的网络连接。在至少一个实施例中,高性能网络控制器(未示出)与接口总线2710耦合。在至少一个实施例中,音频控制器2746是多通道高清晰度音频控制器。在至少一个实施例中,系统2700包括可选的传统I/O控制器2740,用于将传统(例如,个人系统2(PS/2))设备耦合到系统。在至少一个实施例中,平台控制器集线器2730还可以连接到一个或更多个通用串行总线(USB)控制器2742,一个或更多个通用串行总线(USB)控制器2742连接输入设备,诸如键盘和鼠标2743组合、相机2744或其他USB输入设备。
在至少一个实施例中,可以将存储器控制器2716和平台控制器集线器2730的实例集成到分立的外部图形处理器中,例如外部图形处理器2712。在至少一个实施例中,平台控制器集线器2730和/或存储控制器2716可以在一个或更多个处理器2702的外部。例如,在至少一个实施例中,系统2700可以包括外部存储控制器2716和平台控制器集线器2730,其可以被配置为存储控制器集线器和与处理器2702通信的系统芯片组内的外围控制器集线器。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。在此结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815的部分或全部可以被合并到图形处理器2700中。例如,在至少一个实施例中,本文描述的训练和/或推理技术可以使用体现在3D管线中的一个或更多个ALU。此外,在至少一个实施例中,本文描述的推理和/或训练操作可以使用除了图8A或图8B所示的逻辑之外的逻辑来完成。在至少一个实施例中,权重参数可以存储在片上或片外存储器和/或寄存器(示出或未示出)中,所述存储器和/或寄存器配置图形处理器2700的ALU以执行本文描述的一种或更多种机器学习算法、神经网络架构、用例或训练技术。
图28是根据至少一个实施例的具有一个或多个处理器核心2802A-2802N,集成存储器控制器2814和集成图形处理器2808的处理器2800的框图。在至少一个实施例中,处理器2800可包括相当于和包括由虚线框表示的附加核心2802N的附加核心。在至少一个实施例中,处理器核心2802A-2802N中的每一个包括一个或更多个内部高速缓存单元2804A-2804N。在至少一个实施例中,每个处理器核心还可以访问一个或更多个共享高速缓存的单元2806。
在至少一个实施例中,内部高速缓存单元2804A-2804N和共享高速缓存单元2806表示处理器2800内的高速缓存存储器层次结构。在至少一个实施例中,高速缓存存储器单元2804A-2804N可以包括至少一级指令和每个处理器核心和一个或更多个共享中级缓存级别中的数据缓存,例如级别2(L2)、级别3(L3)、级别4(L4)或其他级别的缓存,其中在外部存储器之前的最高级别缓冲为归类为LLC。在至少一个实施例中,高速缓存一致性逻辑维持各种高速缓存单元2806和2804A-2804N之间的一致性。
在至少一个实施例中,处理器2800还可包括一组一个或更多个总线控制器单元2816和系统代理核心2810。在至少一个实施例中,一个或更多个总线控制器单元2816管理一组外围总线,例如一个或更多个PCI或PCI快速总线。在至少一个实施例中,系统代理核心2810为各种处理器组件提供管理功能。在至少一个实施例中,系统代理核心2810包括一个或更多个集成存储器控制器2814,以管理对各种外部存储器设备(未示出)的访问。
在至少一个实施例中,一个或更多个处理器核心2802A-2802N包括对同时多线程的支持。在至少一个实施例中,系统代理核心2810包括用于在多线程处理期间协调和操作核心2802A-2802N的组件。在至少一个实施例中,系统代理核心2810可以另外包括功率控制单元(PCU),该功率控制单元包括逻辑和组件以调节处理器核心2802A-2802N和图形处理器2808的一个或更多个功率状态。
在至少一个实施例中,处理器2800另外包括图形处理器2808以执行图形处理操作。在至少一个实施例中,图形处理器2808与共享高速缓存单元2806和包括一个或更多个集成存储器控制器2814的系统代理核心2810耦合。在至少一个实施例中,系统代理核心2810还包括用于驱动图形处理器输出到一个或多个耦合的显示器的显示控制器2811。在至少一个实施例中,显示控制器2811也可以是经由至少一个互连与图形处理器2808耦合的独立模块,或者可以集成在图形处理器2808内。
在至少一个实施例中,基于环的互连单元2812用于耦合处理器2800的内部组件。在至少一个实施例中,可以使用替代性互连单元,例如点对点互连、交换互连或其他技术。在至少一个实施例中,图形处理器2808经由I/O链路2813与环形互连2812耦合。
在至少一个实施例中,I/O链路2813代表多种I/O互连中的至少一种,包括便于各种处理器组件与高性能嵌入式存储器模块2818(例如eDRAM模块)之间的通信的封装上I/O互连。在至少一个实施例中,处理器核心2802A-2802N和图形处理器2808中的每一个使用嵌入式存储器模块2818作为共享的最后一级高速缓存。
在至少一个实施例中,处理器核心2802A-2802N是执行公共指令集架构的同质核心。在至少一个实施例中,处理器核心2802A-2802N在指令集架构(ISA)方面是异构的,其中一个或更多个处理器核心2802A-2802N执行一个公共指令集,而一个或更多个其他处理器核心2802A-28-02N执行公共指令集或不同指令集的子集。在至少一个实施例中,就微架构而言,处理器核心2802A-2802N是异构的,其中具有相对较高功耗的一个或更多个核心与具有较低功耗的一个或更多个功率核心耦合。在至少一个实施例中,处理器2800可以被实现在一个或更多个芯片上或被实现为SoC集成电路。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。在此结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推论和/或训练逻辑815的部分或全部可以被并入图形处理器2810中。例如,在至少一个实施例中,本文描述的训练和/或推论技术可以使用体现在3D管线、图形核心2802、共享功能逻辑或在图28中的其他逻辑中的一个或更多个ALU。此外,在至少一个实施例中,本文描述的推理和/或训练操作可以使用除图8A或图8B所示的逻辑之外的逻辑来完成。在至少一个实施例中,权重参数可以存储在片上或片外存储器和/或寄存器(示出或未示出)中,所述寄存器和/或寄存器配置处理器2800的ALU以执行本文介绍的一种或更多种机器学习算法、神经网络架构、用例或训练技术。
图29是图形处理器2900的框图,该图形处理器可以是分立的图形处理单元,或者可以是集成有多个处理核心的图形处理器。在至少一个实施例中,图形处理器2900经由存储器映射的I/O接口采用置于存储器中的命令与图形处理器2900上的寄存器通信。在至少一个实施例中,图形处理器2900包括用于访问存储器的存储器接口2914。在至少一个实施例中,存储器接口2914是到本地存储器、一个或更多个内部高速缓存、一个或更多个共享的外部高速缓存和/或到系统存储器的接口。
在至少一个实施例中,图形处理器2900还包括用于将显示输出数据驱动到显示设备2920的显示控制器2902。在至少一个实施例中,显示控制器2902包括用于显示设备2920的一个或更多个覆盖平面的硬件和多层视频或用户界面元素的构成。在至少一个实施例中,显示设备2920可以是内部或外部显示设备。在至少一个实施例中,显示设备2920是头戴式显示设备,例如虚拟现实(VR)显示设备或增强现实(AR)显示设备。在至少一个实施例中,图形处理器2900包括视频编解码器引擎2906,以将媒体编码、解码或转码到一种或更多种媒体编码格式,从一种或更多种媒体编码格式编码、解码或转码,或在一种或多种媒体编码格式之间进行编码、解码或转码,一种或更多种媒体编码格式包括但不限于例如MPEG-2的运动图像专家组(MPEG)格式,例如H.264/MPEG-4AVC的高级视频编码(AVC)格式,以及美国电影电视工程师协会(SMPTE)421M/VC-1,和联合图像专家组(JPEG)格式(例如JPEG)和运动JPEG(MJPEG)格式。
在至少一个实施例中,图形处理器2900包括块图像传送(BLIT)引擎2904,以执行二维(2D)光栅化器操作,包括例如位边界块传送。但是,在至少一个实施例中,使用图形处理引擎(GPE)2910的一个或更多个组件来执行2D图形操作。在至少一个实施例中,GPE 2910是用于执行包括三维(3D)的图形操作和媒体操作的计算引擎。
在至少一个实施例中,GPE 2910包括用于执行3D操作的3D管线2912,例如使用作用于3D图元形状(例如,矩形、三角形等)的处理功能来渲染三维图像和场景。在至少一个实施例中,3D管线2912包括执行各种任务和/或产生到3D/媒体子系统2915的执行线程的可编程和固定功能元件。尽管3D管线2912可用于执行媒体操作,但是在至少一个实施例中,GPE2910也包括媒体管线2916,媒体管线2916用于执行媒体操作,例如视频后处理和图像增强。
在至少一个实施例中,媒体管线2916包括固定功能或可编程逻辑单元,以执行一个或更多个专用媒体操作,例如代替或代表视频编解码器引擎2906的视频解码加速、视频去隔行和视频编码加速。在至少一个实施例中,媒体管线2916还包括线程产生单元,以产生线程以在3D/媒体子系统2915上执行。在至少一个实施例中,产生的线程对3D/媒体子系统2915中包含的一个或更多个图形执行单元执行媒体操作的计算。
在至少一个实施例中,3D/媒体子系统2915包括用于执行由3D管线2912和媒体管线2916产生的线程的逻辑。在至少一个实施例中,3D管线2912和媒体管线2916将线程执行请求发送到3D/媒体子系统2915,其包括用于将各种请求仲裁和分派给可用线程执行资源的线程分派逻辑。在至少一个实施例中,执行资源包括用于处理3D和媒体线程的图形执行单元的阵列。在至少一个实施例中,3D/媒体子系统2915包括用于线程指令和数据的一个或更多个内部高速缓存。在至少一个实施例中,子系统2915还包括共享存储器,包括寄存器和可寻址存储器,以在线程之间共享数据并存储输出数据。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推论和/或训练逻辑815的部分或全部可以被并入图形处理器2900。例如,在至少一个实施例中,本文描述的训练和/或推理技术可以使用包含在3D管线2912中的ALU中的一个或更多个。此外,在至少一个实施例中,本文描述的推理和/或训练操作可以使用不同于图8A或图8B所示的逻辑来完成。在至少一个实施例中,权重参数可以存储在配置图形处理器2900的ALU以执行一种或更多种机器学习算法、神经网络架构、用例或此处介绍的训练技术的片上或片外存储器和/或寄存器(示出或未示出)中。
图30是根据至少一个实施例的图形处理器的图形处理引擎3010的框图。在至少一个实施例中,图形处理引擎(GPE)3010是图29所示的GPE 2910的版本。在至少一个实施例中,媒体管线3016是可选的,并且可以并非显然地包括在GPE 3010内。在至少一个实施例中,单独的媒体和/或图像处理器耦合到GPE 3010。
在至少一个实施例中,GPE 3010耦合到命令流化器3003或包括命令流化器3003,命令流化器3003向3D管线3012和/或媒体管线3016提供命令流。在至少一个实施例中,命令流化器3003耦合到存储器,存储器可以是系统内存,也可以是内部高速缓存存储器和共享高速缓存存储器中的一个或更多个。在至少一个实施例中,命令流化器3003从存储器接收命令,并且将命令发送到3D管线3612和/或媒体管线3616。在至少一个实施例中,命令是从环形缓冲器获取的指令、图元或微操作,环形缓冲器存储用于3D管线3612和媒体管线3616的命令。在至少一个实施例中,环形缓冲器可以另外包括批命令缓冲器,该批命令缓冲器存储多个命令的批次。在至少一个实施例中,用于3D管线3612的命令还可以包括对存储在存储器中的数据的引用,例如但不限于用于3D管线3612的顶点和几何数据和/或用于媒体管线3616的图像数据和存储器对象。在至少一个实施例中,3D管线3612和媒体管线3616通过执行操作或通过将一个或更多个执行线程分派到图形核心阵列3014来处理命令和数据。在至少一个实施例中,图形核心阵列3014包括一个或更多个图形核心块(例如,图形核心3015A、图形核心3015B),每个块包含一个或更多个图形核心。在至少一个实施例中,每个图形核心包括一组图形执行资源以及固定功能纹理处理和/或机器学习和人工智能加速逻辑,该组图形执行资源包括用于执行图形和计算操作的通用和特定于图形的执行逻辑,固定功能纹理处理和/或机器学习和人工智能加速逻辑包括图8A和图8B中的推理和/或训练逻辑815。
在至少一个实施例中,3D管线3612包括固定功能和可编程逻辑,以通过处理指令和将执行线程分派给图形核心阵列3014来处理一个或更多个着色器程序,例如顶点着色器、几何着色器、像素着色器、片段着色器,计算着色器或其他着色器程序。在至少一个实施例中,图形核心阵列3014提供统一的执行资源块,以用于处理着色器程序。在至少一个实施例中,图形核心阵列3014中的图形核心3015A-3015B内的多用途执行逻辑(例如,执行单元)包括对各种3D API着色器语言的支持,并且可以执行与多个着色器相关联的多个同时执行线程。
在至少一个实施例中,图形核心阵列3014还包括执行逻辑,用于执行诸如视频和/或图像处理之类的媒体功能。在至少一个实施例中,除了图形处理操作之外,执行单元还包括可编程以执行并行通用计算操作的通用逻辑。
在至少一个实施例中,由在图形核心阵列3014上执行的线程生成的输出数据可以将数据输出到统一返回缓冲器(URB)3018中的存储器。在至少一个实施例中,URB 3018可以存储多个线程的数据。在至少一个实施例中,URB 3018可以用于在图形核心阵列3014上执行的不同线程之间发送数据。在至少一个实施例中,URB 3018可以另外用于图形核心阵列3014上的线程与共享功能逻辑3020内的固定功能逻辑之间的同步。
在至少一个实施例中,图形核心阵列3014是可扩展的,使得图形核心阵列3014包括可变数量的图形核心,每个图形核心基于GPE 3010的目标功率和性能水平具有可变数量的执行单元。在至少一个实施例中,执行资源是动态可扩展的,使得可以根据需要启用或禁用执行资源。
在至少一个实施例中,图形核心阵列3014耦合到共享功能逻辑3020,该共享功能逻辑3020包括在图形核心阵列3014中的图形核心之间共享的多个资源。在至少一个实施例中,由共享功能逻辑3020执行的共享功能在硬件逻辑单元中体现,这些硬件逻辑单元向图形核心阵列3014提供专门的补充功能。在至少一个实施例中,共享功能逻辑3020包括但不限于采样器3021、数学运算器3022和线程间通信(ITC)3023逻辑。在至少一个实施例中,一个或更多个高速缓存3025被包括在共享功能逻辑3020中或耦合到共享功能逻辑3020。
在至少一个实施例中,如果对专用功能的需求不足以包括在图形核心阵列3014中,则使用共享功能。在至少一个实施例中,在共享功能逻辑3020中使用专用功能的单个实例并且在图形核心阵列3014中其他执行资源之间共享专用功能的单个实例。在至少一个实施例中,在图形核心阵列3014内的共享功能逻辑3016中可以包括由图形核心阵列3014广泛使用的共享功能逻辑3020中的特定共享功能。在至少一个实施例中,图形核心阵列3014内的共享功能逻辑3016可以包括共享功能逻辑3020内的一些或全部逻辑。在至少一个实施例中,可以在图形核心阵列3014的共享功能逻辑3016内复制共享功能逻辑3020内的所有逻辑元素。在至少一个实施例中,排除了共享功能逻辑3020,而支持图形核心阵列3014内共享功能逻辑3016。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815的部分或全部可以被并入图形处理器3010中。例如,在至少一个实施例中,本文描述的训练和/或推理技术可以使用包含在图30中的3D管线3612、图形核心3015A、共享功能逻辑3016、图形核心3015B、共享功能逻辑3020或其他逻辑中的一个或更多个ALU。此外,在至少一个实施例中,可以使用除图8A或图8B中所示的逻辑之外的逻辑来完成本文所述的推理和/或训练操作。在至少一个实施例中,权重参数可以存储在片上或片外存储器和/或寄存器(示出或未示出)中,所述片上或片外存储器和/或寄存器配置图形处理器3010的ALU以执行一种或更多种机器学习算法、神经网络架构,用例或本文描述的训练技术。
图31是根据本文所述的至少一个实施例的图形处理器核心3100的硬件逻辑的框图。在至少一个实施例中,图形处理器核心3100被包括在图形核心阵列内。在至少一个实施例中,图形处理器核心3100(有时称为核心切片)可以是模块化图形处理器内的一个或更多个图形核心。在至少一个实施例中,图形处理器核心3100是一个图形核心切片的示例,并且本文所述的图形处理器可以基于目标功率和性能包络线包括多个图形核心切片。在至少一个实施例中,每个图形核心3100可以包括与多个子核心3101A-3101F耦合的固定功能块3130,也称为子切片,其包括通用和固定功能逻辑的模块块。
在至少一个实施例中,固定功能块3130包括几何/固定功能管线3136,例如,在较低性能和/或较低功率的图形处理器实施方式中,该几何/固定功能管线3136可以由图形处理器3100中的所有子核心共享。在至少一个实施例中,几何/固定功能管线3136包括3D固定功能管线、视频前端单元,线程产生器和线程分派器以及管理统一返回缓冲区的统一返回缓冲区管理器。
在至少一个实施例中,固定功能块3130还包括图形SoC接口3137、图形微控制器3138和媒体管线3139。在固定的至少一个实施例中,图形SoC接口3137提供了图形核心3100以及片上集成电路系统中的其他处理器核心之间的接口。在至少一个实施例中,图形微控制器3138是可编程子处理器,其可配置为管理图形处理器3100的各种功能,包括线程分派、调度和抢占。在至少一个实施例中,媒体管线3139包括有助于对包括图像和视频数据的多媒体数据进行解码、编码、预处理和/或后处理的逻辑。在至少一个实施例中,媒体管线3139经由对子核心3101-3101F内的计算或采样逻辑的请求来实现媒体操作。
在至少一个实施例中,SoC接口3137使图形核心3100能够与通用应用处理器核心(例如,CPU)和/或SoC内的其他组件通信,包括存储器层次结构元素,诸如共享的最后一级高速缓存、系统RAM和/或嵌入式片上或封装DRAM。在至少一个实施例中,SoC接口3137还可以使得能够与SoC内的固定功能设备(例如,相机成像管线)进行通信,并且使得能够使用和/或实现可以在图形核心3100和SoC内部的CPU之间共享的全局存储器原子。在至少一个实施例中,图形SoC接口3137还可以实现用于图形核心3100的电源管理控制,并且启用图形核心3100的时钟域与SoC内的其他时钟域之间的接口。在至少一个实施例中,SoC接口3137使得能够从命令流转化器和全局线程分派器接收命令缓冲区,其配置为向图形处理器内的一个或更多个图形核心中的每一个提供命令和指令。在至少一个实施例中,当要执行媒体操作时,可以将命令和指令分派给媒体管线3139,或者当要执行图形处理操作时,可以将其分配给几何形状和固定功能管线(例如,几何形状和固定功能管线3136、几何形状和固定功能管线3114)。
在至少一个实施例中,图形微控制器3138可以配置为对图形核心3100执行各种调度和管理任务。在至少一个实施例中,图形微控制器3138可以在子核心3101A-3101F中的执行单元(EU)阵列3102A-3102F、3104A-3104F内的各种图形并行引擎上执行图形和/或计算工作负载调度。在至少一个实施例中,在包括图形核心3100的SoC的CPU核心上执行的主机软件可以提交多个图形处理器门铃之一的工作负载,其调用适当的图形引擎上的调度操作。在至少一个实施例中,调度操作包括确定接下来要运行哪个工作负载、将工作负载提交给命令流转化器、抢先在引擎上运行的现有工作负载、监控工作负载的进度以及在工作负载完成时通知主机软件。在至少一个实施例中,图形微控制器3138还可以促进图形核心3100的低功率或空闲状态,从而为图形核心3100提供在图形核心3100内独立于操作系统和/或系统上的图形驱动程序软件的跨低功率状态转换的保存和恢复寄存器的能力。
在至少一个实施例中,图形核心3100可以具有比所示的子核心3101A-3101F多或少达N个模块化子核心。对于每组N个子核心,在至少一个实施例中,图形核心3100还可以包括共享功能逻辑3110、共享和/或高速缓存存储器3112、几何/固定功能管线3114以及附加的固定功能逻辑3116以加速各种图形和计算处理操作。在至少一个实施例中,共享功能逻辑3110可以包括可由图形核心3100内的每个N个子核心共享的逻辑单元(例如,采样器、数学和/或线程间通信逻辑)。在至少一个实施例中,共享和/或缓存存储器3112可以是图形核心3100内的N个子核心3101A-3101F的最后一级高速缓存,并且还可以用作可由多个子核心访问的共享存储器。在至少一个实施例中,可以包括几何/固定功能管线3114来代替固定功能块3130内的几何/固定功能管线3136,并且可以包括相同或相似的逻辑单元。
在至少一个实施例中,图形核心3100包括附加的固定功能逻辑3116,其可以包括供图形核心3100使用的各种固定功能加速逻辑。在至少一个实施例中,附加的固定功能逻辑3116包括用于仅位置着色中使用的附加的几何管线。在仅位置着色中,存在至少两个几何管线,而在几何和固定功能管线3116、3136内的完整几何管线和剔除管线中,其是可以包括在附加的固定功能逻辑3116中的附加几何管线。在至少一个实施例中,剔除管线是完整几何管线的修整版。在至少一个实施例中,完整管线和剔除管线可以执行应用程序的不同实例,每个实例具有单独的环境。在至少一个实施例中,仅位置着色可以隐藏被丢弃的三角形的长剔除运行,从而在某些情况下可以更早地完成着色。例如,在至少一个实施例中,附加固定功能逻辑3116中的剔除管线逻辑可以与主应用程序并行执行位置着色器,并且通常比完整管线更快地生成关键结果,因为剔除管线获取并遮蔽顶点的位置属性,无需执行光栅化和将像素渲染到帧缓冲区。在至少一个实施例中,剔除管线可以使用生成的临界结果来计算所有三角形的可见性信息,而与这些三角形是否被剔除无关。在至少一个实施例中,完整管线(在这种情况下可以称为重播管线)可以消耗可见性信息来跳过剔除的三角形以仅遮盖最终传递到光栅化阶段的可见三角形。
在至少一个实施例中,附加的固定功能逻辑3116还可包括机器学习加速逻辑,例如固定功能矩阵乘法逻辑,用于实现包括用于机器学习训练或推理的优化。
在至少一个实施例中,在每个图形子核心3101A-3101F内包括一组执行资源,其可用于响应于图形管线、媒体管线或着色器程序的请求来执行图形、媒体和计算操作。在至少一个实施例中,图形子核心3101A-3101F包括多个EU阵列3102A-3102F、3104A-3104F,线程分派和线程间通信(TD/IC)逻辑3103A-3103F,3D(例如,纹理)采样器3105A-3105F,媒体采样器3106A-3106F,着色器处理器3107A-3107F和共享本地存储器(SLM)3108A-3108F。在至少一个实施例中,EU阵列3102A-3102F、3104A-3104F每个都包含多个执行单元,这些执行单元是通用图形处理单元,能够为图形、媒体或计算操作提供服务,执行浮点和整数/定点逻辑运算,包括图形、媒体或计算着色器程序。在至少一个实施例中,TD/IC逻辑3103A-3103F为子核心内的执行单元执行本地线程分派和线程控制操作,并促进在子核心的执行单元上执行的线程之间的通信。在至少一个实施例中,3D采样器3105A-3105F可以将与纹理或其他3D图形相关的数据读取到存储器中。在至少一个实施例中,3D采样器可以基于与给定纹理相关联的配置的采样状态和纹理格式来不同地读取纹理数据。在至少一个实施例中,媒体采样器3106A-3106F可以基于与媒体数据相关联的类型和格式来执行类似的读取操作。在至少一个实施例中,每个图形子核心3101A-3101F可以可替代地包括统一的3D和媒体采样器。在至少一个实施例中,在每个子核心3101A-3101F内的执行单元上执行的线程可以利用每个子核心内的共享本地存储器3108A-3108F,以使在线程组内执行的线程能够使用片上存储器的公共池来执行。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑815的部分或全部可以被合并到图形处理器3110中。例如,在至少一个实施例中,本文描述的训练和/或推理技术可以使用3D管线3110、图形微控制器3138、几何和固定功能管线3114和3136或图31中的其他逻辑中体现的一个或更多个ALU。此外,在至少一个实施例中,本文描述的推理和/或训练操作可以使用除图8A或图8B所示的逻辑以外的逻辑来完成。在至少一个实施例中,权重参数可以存储在片上或片外存储器和/或寄存器(示出或未示出)中,所述权重参数配置图形处理器3100的ALU以执行本文介绍的一种或更多种机器学习算法、神经网络架构、用例或训练技术。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图32A-图32B示出了根据至少一个实施例的包括图形处理器核心的处理元件的阵列的线程执行逻辑3200。图32A示出了至少一个实施例,其中使用了线程执行逻辑3200。图32B示出了根据至少一个实施例的图形执行单元3208的示例性内部细节。
如图32A中所示,在至少一个实施例中,线程执行逻辑3200包括着色器处理器3202、线程分派器3204、指令高速缓存3206、包括多个执行单元3207A-3207N和3208A-3208N的可缩放执行单元阵列、采样器3210、数据高速缓存3212和数据端口3214。在至少一个实施例中,可缩放执行单元阵列可以例如基于工作负载的计算要求,通过启用或禁用一个或更多个执行单元(例如,执行单元3208A-N和3207A-N中的任何一个)来动态缩放。在至少一个实施例中,可缩放执行单元通过链路到每个执行单元的互连结构互连。在至少一个实施例中,线程执行逻辑3200包括通过指令高速缓存3206、数据端口3214、采样器3210和执行单元3207或3208中的一个或更多个到存储器(诸如系统存储器或高速缓存存储器)的一个或更多个连接。在至少一个实施例中,每个执行单元(例如3208A)是独立的可编程通用计算单元,其能够执行多个同时的硬件线程,同时针对每个线程并行处理多个数据元素。在至少一个实施例中,执行单元3207和/或3208的阵列可缩放以包括任意数量的单独执行单元。
在至少一个实施例中,执行单元3207和/或3208主要用于执行着色器程序。在至少一个实施例中,着色器处理器3202可以处理各种着色器程序并经由线程分派器3204来分派与着色器程序相关联的执行线程。在至少一个实施例中,线程分派器3204包括用于仲裁来自图形和媒体管线的线程初始化庆祝以及在执行单元3207和/或3208中的一个或更多个执行单元上实例化请求的线程的逻辑。例如,在至少一个实施例中,几何管线可以将顶点、镶嵌或几何着色器分派到线程执行逻辑以进行处理。在至少一个实施例中,线程分派器3204还可以处理来自执行着色器程序的运行时线程产生请求。
在至少一个实施例中,执行单元3207和/或3208支持一种指令集,该指令集包括对许多标准3D图形着色器指令的本机支持,从而使图形库(例如Direct 3D和OpenGL)中的着色器程序只需最少的翻译即可执行。在至少一个实施例中,执行单元支持顶点和几何处理(例如,顶点程序、几何程序、顶点着色器)、像素处理(例如,像素着色器、片段着色器)和通用处理(例如,计算和媒体着色器)。在至少一个实施例中,每个执行单元3207和/或3208包括一个或更多个算术逻辑单元(ALU),能够执行多发出单指令多数据(SIMD),并且多线程操作实现了高效的执行环境尽管有更高的延迟存储器访问。在至少一个实施例中,每个执行单元内的每个硬件线程具有专用的高带宽寄存器文件和相关的独立线程状态。在至少一个实施例中,执行是每个时钟到管线的多次发出,管线能够进行整数、单精度和双精度浮点运算、SIMD分支功能、逻辑运算、先验运算和其他其他运算。在至少一个实施例中,在等待来自存储器或共享功能之一的数据时,执行单元3207和/或3208内的依赖性逻辑使等待线程休眠直到返回了所请求的数据。在至少一个实施例中,当等待线程正在休眠时,硬件资源可以专用于处理其他线程。例如,在至少一个实施例中,在与顶点着色器操作相关联的延迟期间,执行单元可以对像素着色器、片段着色器或另一类型的着色器程序(包括不同的顶点着色器)执行操作。
在至少一个实施例中,执行单元3207和/或3208中的每一个执行单元在数据元素的阵列上进行操作。在至少一个实施例中,多个数据元素是“执行大小”或指令的通道数。在至少一个实施例中,执行通道是用于指令内的数据元素访问、屏蔽和流控制的执行的逻辑单元。在至少一个实施例中,多个通道可以独立于用于特定图形处理器的多个物理算术逻辑单元(ALU)或浮点单元(FPU)。在至少一个实施例中,执行单元3207和/或3208支持整数和浮点数据类型。
在至少一个实施例中,执行单元指令集包括SIMD指令。在至少一个实施例中,各种数据元素可以作为封装数据类型存储在寄存器中,并且执行单元将基于元素的数据大小来处理各种元素。例如,在至少一个实施例中,当对256位宽的向量进行操作时,将向量的256位存储在寄存器中,并且执行单元对向量进行操作,作为四个单独的64位封装数据元素(四字(QW)大小数据元素)、八个单独的32位封装数据元素(双字(DW)大小数据元素)、十六个单独的16位封装数据元素(单词(W)大小数据元素)或三十二个单独的8位数据元素(字节(B)大小的数据元素)。然而,在至少一个实施例中,不同的向量宽度和寄存器大小是可能的。
在至少一个实施例中,一个或更多个执行单元可以被组合成具有共同于融合EU的线程控制逻辑(3211A-3211N)的融合执行单元3209A-3209N,诸如执行单元3207A与执行单元3208A融合形成融合的执行单元3209A。在至少一个实施例中,可以将多个EU合并成一个EU组。在至少一个实施例中,融合EU组中的每个EU可以配置为执行单独的SIMD硬件线程。融合的EU组中的EU的数量可以根据各种实施例而变化。在至少一个实施例中,每个EU可以执行各种SIMD宽度,包括但不限于SIMD8、SIMD16和SIMD32。在至少一个实施例中,每个融合图形执行单元3209A-3209N包括至少两个执行单元。例如,在至少一个实施例中,融合执行单元3209A包括第一EU3207A、第二EU3907A以及第一EU3207A和第二EU3208A共有的线程控制逻辑3211A。在至少一个实施例中,线程控制逻辑3207A控制在融合图形执行单元3209A上执行的线程,从而允许融合执行单元3209A-3209N内的每个EU使用公共指令指针寄存器来执行。
在至少一个实施例中,一个或更多个内部指令高速缓存(例如3206)被包括在线程执行逻辑3200中以高速缓存用于执行单元的线程指令。在至少一个实施例中,包括一个或更多个数据高速缓存(例如3212)以在线程执行期间高速缓存线程数据。在至少一个实施例中,包括采样器3210以提供用于3D操作的纹理采样和用于媒体操作的媒体采样。在至少一个实施例中,采样器3210包括专门的纹理或媒体采样功能,以在将采样数据提供给执行单元之前在采样过程中处理纹理或媒体数据。
在执行期间,在至少一个实施例中,图形和媒体管线通过线程产生和分派逻辑将线程发起请求发送到线程执行逻辑3200。在至少一个实施例中,一旦一组几何对象已经被处理并光栅化成像素数据,则在着色器处理器3202内的像素处理器逻辑(例如,像素着色器逻辑、片段着色器逻辑等)被调用以进一步计算输出信息并且导致将结果写入输出表面(例如,颜色缓冲区、深度缓冲区、模板缓冲区等)。在至少一个实施例中,像素着色器或片段着色器计算要在光栅化对象上插值的各种顶点属性的值。在至少一个实施例中,着色器处理器3202内的像素处理器逻辑然后执行应用程序接口(API)提供的像素或片段着色器程序。在至少一个实施例中,为了执行着色器程序,着色器处理器3202经由线程分派器3204将线程分派到执行单元(例如3208A)。在至少一个实施例中,着色器处理器3202使用采样器3210中的纹理采样逻辑来访问存储在存储器中的纹理贴图中的纹理数据。在至少一个实施例中,对纹理数据和输入几何数据的算术运算为每个几何片段计算像素颜色数据,或者丢弃一个或更多个像素以进行进一步处理。
在至少一个实施例中,数据端口3214提供了一种用于线程执行逻辑3200的存储器访问机制,以将处理后的数据输出到存储器以在图形处理器输出管线上进行进一步处理。在至少一个实施例中,数据端口3214包括或耦合到一个或更多个高速缓存存储器(例如,数据高速缓存3212)以高速缓存数据以便经由数据端口进行存储器访问。
如图32B所示,在至少一个实施例中,图形执行单元3208可以包括指令获取单元3237、通用寄存器文件阵列(GRF)3224、架构寄存器文件阵列(ARF)3226、线程仲裁器3222、发送单元3230、分支单元3232、一组SIMD浮点单元(FPU)3234,以及在至少一个实施例中,一组专用整数SIMD ALU3235。在至少一个实施例中,GRF3224和ARF3226包括一组与可以在图形执行单元3208中活跃的每个同时硬件线程相关联的通用寄存器文件和架构寄存器文件。在至少一个实施例中,在ARF3226中维护每个线程架构状态,而在线程执行期间使用的数据存储在GRF3224中。在至少一个实施例中,每个线程的执行状态,包括每个线程的指令指针,可以被保存在ARF3226中的线程专用寄存器中。
在至少一个实施例中,图形执行单元3208具有一种架构,该架构是同时多线程(SMT)和细粒度交错多线程(IMT)的组合。在至少一个实施例中,架构具有模块化配置,该模块化配置可以在设计时基于同时线程的目标数量和每个执行单元的寄存器数量来进行微调,其中执行单元资源在用于执行多个同时线程的逻辑上分配。
在至少一个实施例中,图形执行单元3208可以共同发布多个指令,每个指令可以是不同的指令。在至少一个实施例中,图形执行单元线程3208的线程仲裁器3222可以将指令分派到发送单元3230、分支单元3242或SIMD FPU 3234之一以供执行。在至少一个实施例中,每个执行线程可以访问GRF 3224中的128个通用寄存器,其中每个寄存器可以存储32个字节,可以作为32位数据元素的SIMD 8元素向量进行访问。在至少一个实施例中,每个执行单元线程可以访问GRF 3224中的4KB,尽管实施例不限于此,并且在其他实施例中可以提供更多或更少的寄存器资源。在至少一个实施例中,尽管每个执行单元的线程数量也可以根据实施例而变化,但是最多可以同时执行七个线程。在其中七个线程可以访问4KB的至少一个实施例中,GRF 3224可以存储总共28KB。在至少一个实施例中,灵活的寻址模式可以允许将寄存器一起寻址以有效地建立更宽的寄存器或表示跨步的矩形块数据结构。
在至少一个实施例中,经由由消息传递发送单元3230执行的“发送”指令来调度存储器操作、采样器操作和其他更长延迟的系统通信。在至少一个实施例中,将分支指令分派到专用分支单元3232促进SIMD发散和最终收敛。
在至少一个实施例中,图形执行单元3208包括一个或更多个SIMD浮点单元(FPU)3234,以执行浮点操作。在至少一个实施例中,FPU 3234还支持整数计算。在至少一个实施例中,FPU 3234可以SIMD执行多达M个32位浮点(或整数)运算,或者SIMD执行多达2M个16位整数或16位浮点运算。在至少一个实施例中,FPU中的至少一个提供扩展的数学能力以支持高吞吐量的先验数学函数和双精度64位浮点。在至少一个实施例中,还存在一组8位整数SIMD ALU 3235,并且可以被专门优化以执行与机器学习计算相关的操作。
在至少一个实施例中,可以在图形子核心分组(例如,子切片)中实例化图形执行单元3208的多个实例的阵列。在至少一个实施例中,执行单元3208可以跨多个执行通道执行指令。在至少一个实施例中,在图形执行单元3208上执行的每个线程在不同的通道上执行。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,推理和/或训练逻辑1515的部分或全部可以被结合到执行逻辑3200中。此外,在至少一个实施例中,可以使用除了图8A或图8B中所示的逻辑之外的逻辑来完成在此描述的推理和/或训练操作。在至少一个实施例中,权重参数可以存储在片上或片外存储器和/或寄存器(示出或未示出)中,其配置执行逻辑3200的ALU线程以执行一种或更多种机器学习算法、神经网络架构、用例或本文介绍的训练技术。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图33示出了根据至少一个实施例的并行处理单元(“PPU”)3300。在至少一个实施例中,PPU 3300配置有机器可读代码,该机器可读代码如果由PPU 3300执行,则使得PPU3300执行贯穿本公开描述的一些或全部过程和技术。在至少一个实施例中,PPU3300是在一个或更多个集成电路设备上实现的多线程处理器,并且利用多线程作为被设计为处理在多个线程上并行执行的计算机可读指令(也称为机器可读指令或简单的指令)的延迟隐藏技术。在至少一个实施例中,线程是指执行线程,并且是被配置为由PPU 3300执行的一组指令的实例。在至少一个实施例中,PPU 3300是图形处理单元(“GPU”),图形处理单元配置为实现用于处理三维(“3D”)图形数据的图形渲染管线,以便生成用于在显示设备(诸如液晶显示器(“LCD”)设备)上显示的二维(“2D”)图像数据。在至少一个实施例中,PPU 3300用于执行计算,诸如线性代数运算和机器学习运算。图33仅出于说明性目的示出了示例并行处理器,并且应被解释为在本公开的范围内设想的处理器架构的非限制性示例,并且可以采用任何适当的处理器来对其进行补充和/或替代。
在至少一个实施例中,一个或更多个PPU 3300配置成加速高性能计算(“HPC”)、数据中心和机器学习应用程序。在至少一个实施例中,PPU 3300配置成加速深度学习系统和应用程序,包括以下非限制性示例:自动驾驶汽车平台、深度学习、高精度语音、图像、文本识别系统、智能视频分析、分子模拟、药物发现、疾病诊断、天气预报、大数据分析、天文学、分子动力学模拟、财务建模、机器人技术、工厂自动化、实时语言翻译、在线搜索优化以及个性化用户推荐等。
在至少一个实施例中,PPU 3300包括但不限于输入/输出(“I/O”)单元3306、前端单元3310、调度器单元3312、工作分配单元3314、集线器3316、交叉开关(“Xbar”)3320、一个或更多个通用处理集群(“GPC”)3318和一个或更多个分区单元(“内存分区单元”)3322。在至少一个实施例中,PPU 3300通过一个或更多个高速GPU互连(“GPU互连”)3308连接到主机处理器或其他PPU 3300。在至少一个实施例中,PPU 3300通过系统总线3302连接到主机处理器或其他外围设备。在一实施例中,PPU 3300连接到包括一个或更多个存储器设备(“存储器”)3304的本地存储器。在至少一个实施例中,存储器设备3304包括但不限于一个或更多个动态随机存取存储器(“DRAM”)设备。在至少一个实施例中,一个或更多个DRAM设备配置和/或可配置为高带宽存储器(“HBM”)子系统,并且在每个设备内堆叠有多个DRAM管芯。
在至少一个实施例中,高速GPU互连3308可以指代系统使用其来进行缩放的基于线的多通道通信链路,并包括与一个或更多个中央处理单元结合的一个或更多个PPU 3300(“CPU”),支持PPU 3300和CPU之间的缓存相干以及CPU主控。在至少一个实施例中,高速GPU互连3308通过集线器3316将数据和/或命令传输到PPU 3300的其他单元,例如一个或更多个复制引擎、视频编码器、视频解码器、电源管理单元和/或在图33中可能未明确示出的其他组件。
在至少一个实施例中,I/O单元3306配置为通过系统总线3302从主机处理器(图33中未示出)发送和接收通信(例如,命令、数据)。在至少一个实施例中,I/O单元3306直接通过系统总线3302或通过一个或更多个中间设备(例如存储器桥)与主机处理器通信。在至少一个实施例中,I/O单元3306可以经由系统总线3302与一个或更多个其他处理器(例如一个或更多个PPU 3300)通信。在至少一个实施例中,I/O单元3306实现外围组件互连快速(“PCIe”)接口,用于通过PCIe总线进行通信。在至少一个实施例中,I/O单元3306实现用于与外部设备通信的接口。
在至少一个实施例中,I/O单元3306对经由系统总线3302接收的分组进行解码。在至少一个实施例中,至少一些分组表示被配置为使PPU 3300执行各种操作的命令。在至少一个实施例中,I/O单元3306如命令所指定的那样将解码的命令发送到PPU 3300的各种其他单元。在至少一个实施例中,命令被发送到前端单元3310和/或被发送到集线器3316或PPU 3300的其他单元,例如一个或更多个复制引擎、视频编码器、视频解码器、电源管理单元等(图33中未明确示出)。在至少一个实施例中,I/O单元3306配置为在PPU 3300的各种逻辑单元之间路由通信。
在至少一个实施例中,由主机处理器执行的程序在缓冲区中对命令流进行编码,该缓冲区将工作负载提供给PPU 3300以进行处理。在至少一个实施例中,工作负载包括指令和要由那些指令处理的数据。在至少一个实施例中,缓冲区是可由主机处理器和PPU3300两者访问(例如,读/写)的存储器中的区域—主机接口单元可以配置为访问经由I/O单元3306通过系统总线3302传输的存储器请求连接到系统总线3302的系统存储器中的缓冲区。在至少一个实施例中,主机处理器将命令流写入缓冲区,然后将指示命令流开始的指针发送给PPU 3300,使得前端单元3310接收指向一个或更多个命令流指针并管理一个或更多个命令流,从命令流中读取命令并将命令转发到PPU 3300的各个单元。
在至少一个实施例中,前端单元3310耦合到调度器单元3312,该调度器单元3312配置各种GPC 3318以处理由一个或更多个命令流定义的任务。在至少一个实施例中,调度器单元3312配置为追踪与调度器单元3312管理的各种任务有关的状态信息,其中状态信息可以指示任务被分配给哪个GPC 3318,任务是活跃的还是非活跃的,与任务相关联的优先级等等。在至少一个实施例中,调度器单元3312管理在一个或更多个GPC 3318上执行的多个任务。
在至少一个实施例中,调度器单元3312耦合到工作分配单元3314,该工作分配单元3314配置为分派任务以在GPC 3318上执行。在至少一个实施例中,工作分配单元3314追踪从调度器单元3312接收到的多个调度任务并且工作分配单元3314管理每个GPC 3318的待处理任务池和活跃任务池。在至少一个实施例中,待处理任务池包括多个时隙(例如32个时隙),这些时隙包含分配给要由特定的GPC 3318处理的任务;活跃任务池可包括用于由GPC 3318主动处理的任务的多个时隙(例如4个时隙),以使随着GPC 3318中的一个完成任务的执行,该任务将从GPC 3318的活动任务池中逐出,并且从待处理任务池中选择另一任务,并安排其在GPC 3318上执行。在至少一个实施例中,如果活跃任务在GPC 3318上处于空闲状态,例如在等待数据依赖性解决时,则活跃任务从GPC 3318中驱逐并返回到待处理任务池,同时选择了待处理任务池中的另一个任务并调度在GPC 3318上执行。
在至少一个实施例中,工作分配单元3314经由XBar 3320与一个或更多个GPC3318通信。在至少一个实施例中,XBar 3320是互连网络,其将PPU 3300的许多单元耦合到PPU 3300的其他单元,并且可以配置为将工作分配单元3314耦合到特定的GPC 3318。在至少一个实施例中,一个或更多个PPU 3300的其他单元也可以通过集线器3316连接到XBar3320。
在至少一个实施例中,任务由调度器单元3312管理,并由工作分配单元3314分配给GPC 3318之一。在至少一个实施例中,GPC 3318配置为处理任务并产生结果。在至少一个实施例中,结果可以由GPC 3318中的其他任务消耗,通过XBar 3320路由到不同的GPC 3318或存储在存储器3304中。在至少一个实施例中,结果可以通过分区单元3322写到存储器3304中,其实现了用于向存储器3304写入数据或从存储器3304读取数据的存储器接口。在至少一个实施例中,结果可以经由高速GPU互连3308传输到另一PPU 3304或CPU。在至少一个实施例中,PPU 3300包括但不限于U个分区单元3322,其等于耦合到PPU 3300的分离且不同的存储设备3304的数量。在至少一个实施例中,下面结合图35更详细地描述分区单元3322。
在至少一个实施例中,主机处理器执行驱动器核心,该驱动程序核心实现应用程序编程接口(API),该应用程序编程接口使在主机处理器上执行的一个或更多个应用程序能够调度操作以在PPU 3300上执行。在一个实施例中,多个计算应用由PPU 3300同时执行,并且PPU 3300为多个计算应用程序提供隔离、服务质量(“QoS”)和独立的地址空间。在至少一个实施例中,应用程序生成指令(例如,以API调用的形式),该指令使驱动器核心生成一个或更多个任务以供PPU 3300执行,并且驱动器核心将任务输出至由PPU 3300处理的一个或更多个流。在至少一个实施例中,每个任务包括一个或更多个相关线程组,其可以被称为线程束(warp)。在至少一个实施例中,线程束包括可以并行执行的多个相关线程(例如32个线程)。在至少一个实施例中,协作线程可以指代多个线程,包括用于执行任务并且通过共享存储器交换数据的指令。在至少一个实施例中,结合图35更详细地描述了线程和协作线程。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,深度学习应用处理器用于训练机器学习模型(诸如神经网络),以预测或推理提供给PPU3300的信息。在至少一个实施例中,PPU 3300用于基于已由另一处理器或系统或PPU 3300训练过的训练过的机器学习模型(例如,神经网络)推理或预测信息。在至少一个实施例中,PPU 3300可用于执行本文所述的一个或更多个神经网络用例。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图34示出了根据至少一个实施例的通用处理集群(“GPC”)3400。在至少一个实施例中,GPC 3400是图40的GPC 4018。在至少一个实施例中,每个GPC 3400包括但不限于用于处理任务的多个硬件单元,并且每个GPC 3400包括但不限于管线管理器3402、预光栅操作单元(“preROP”)3404、光栅引擎3408、工作分配交叉开关(“WDX”)3416、存储器管理单元(“MMU”)3418、一个或更多个数据处理集群(“DPC”)3406,以及部件的任何合适组合。
在至少一个实施例中,GPC 3400的操作由管线管理器3402控制。在至少一个实施例中,管线管理器3402管理一个或更多个DPC 3406的配置,以处理分配给GPC 3400的任务。在至少一个实施例中,管线管理器3402配置一个或更多个DPC 3406中的至少一个以实现图形渲染管线的至少一部分。在至少一个实施例中,DPC 3406配置为在可编程流式多处理器(“SM”)3414上执行顶点着色器程序。在至少一个实施例中,管线管理器3402配置为将从工作分配单元接收的数据包路由到GPC 3400内的适当逻辑单元,以及在至少一个实施例中,可以将一些数据包路由到preROP 3404和/或光栅引擎3408中的固定功能硬件单元,而可以将其他数据包路由到DPC 3406以由图元引擎3412或SM 3414进行处理。在至少一个实施例中,管线管理器3402配置DPC 3406中的至少一个以实现神经网络模型和/或计算管线。
在至少一个实施例中,preROP单元3404配置为在至少一个实施例中将由光栅引擎3408和DPC 3406生成的数据路由到上面结合图33更详细地描述的分区单元3322中的光栅操作(“ROP”)单元。在至少一个实施例中,preROP单元3404配置为执行用于颜色混合的优化、组织像素数据、执行地址转换等等。在至少一个实施例中,光栅引擎3408包括但不限于配置为执行各种光栅操作的多个固定功能硬件单元,并且在至少一个实施例中,光栅引擎3408包括但不限于设置引擎、粗光栅引擎、剔除引擎、裁剪引擎、精细光栅引擎、图块聚合引擎及其任意合适的组合。在至少一个实施例中,设置引擎接收变换后的顶点并生成与由顶点定义的几何图元相关联的平面方程;平面方程式被传送到粗光栅引擎以生成基本图元的覆盖信息(例如,图块的x、y覆盖范围掩码);粗光栅引擎的输出将传输到剔除引擎,在剔除引擎中与z测试失败的图元相关联的片段将被剔除,并传输到剪切引擎,在剪切引擎中剪切位于视锥范围之外的片段。在至少一个实施例中,将经过裁剪和剔除的片段传递给精细光栅引擎,以基于设置引擎生成的平面方程式生成像素片段的属性。在至少一个实施例中,光栅引擎3408的输出包括将由任何适当的实体(例如,由在DPC 3406内实现的片段着色器)处理的片段。
在至少一个实施例中,包括在GPC 3400中的每个DPC 3406包括但不限于M管线控制器(“MPC”)3410;图元引擎3412;一个或更多个SM 3414;及其任何合适的组合。在至少一个实施例中,MPC 3410控制DPC 3406的操作,将从管线管理器3402接收的分组路由到DPC3406中的适当单元。在至少一个实施例中,将与顶点相关联的分组路由到图元引擎3412,图元引擎3412配置为从存储器中获取与顶点关联的顶点属性;相反,可以将与着色器程序相关联的数据包发送到SM 3414。
在至少一个实施例中,SM 3414包括但不限于可编程流式处理器,其配置为处理由多个线程表示的任务。在至少一个实施例中,SM 3414是多线程的并且配置为同时执行来自特定线程组的多个线程(例如32个线程),并且实现单指令多数据(“SIMD”)架构,其中将一组线程(例如,线程束)中的每个线程配置为基于共同的指令集来处理不同的数据集。在至少一个实施例中,线程组中的所有线程执行相同的指令。在至少一个实施例中,SM 4114实施单指令多线程(“SIMT”)架构,其中一组线程中的每个线程配置为基于共同的指令集来处理不同的数据集,但是其中线程组中的各个线程允许在执行期间发散。在至少一个实施例中,为每个线程束维护程序计数器、调用栈和执行状态,从而当线程束中的线程发散时,实现线程束和线程束内的串行执行之间的并发性。在另一个实施例中,为每个单独的线程维护程序计数器、调用栈和执行状态,从而使得在线程束内和线程束之间的所有线程之间具有相等的并发性。在至少一个实施例中,为每个单独的线程维持执行状态,并且可以收敛并并行地执行执行共同指令的线程以提高效率。下面更详细地描述SM 3414的至少一个实施例。
在至少一个实施例中,MMU 3418在GPC 3400和内存分区单元(例如,图33的分区单元3322)之间提供接口,并且MMU 3418提供虚拟地址到物理地址的转换、存储器保护以及存储器请求的仲裁。在至少一个实施例中,MMU 3418提供一个或更多个转换后备缓冲区(“TLB”),用于执行虚拟地址到存储器中的物理地址的转换。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,深度学习应用处理器用于训练机器学习模型(诸如神经网络),以预测或推理提供给GPC3400的信息。在至少一个实施例中,GPC 3400用于基于已由另一处理器或系统或GPC 3400训练过的机器学习模型(例如,神经网络)推理或预测信息。在至少一个实施例中,GPC 3400可用于执行本文所述的一个或更多个神经网络用例。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
图35示出了根据一个实施例的并行处理单元(“PPU”)的内存分区单元3500。在至少一个实施例中,内存分区单元3500包括但不限于光栅操作(“ROP”)单元3502;二级(“L2”)高速缓存3504;存储器接口3506;及其任何合适的组合。在至少一个实施例中,存储器接口3506耦合到存储器。在至少一个实施例中,存储器接口3506可以实现32、64、128、1024位数据总线等,用于高速数据传输。在至少一个实施例中,PPU包括U个存储器接口3506(其中U为正整数)、每对分区单元3500一个存储器接口3506,其中每对分区单元3500连接到相应的存储器设备。例如,在至少一个实施例中,PPU最多可以连接到Y个存储设备,例如高带宽存储堆栈或图形双数据速率、版本5、同步动态随机存取存储器(“GDDR5 SDRAM”)。
在一个实施例中,存储器接口3506实现了高带宽存储器二代(“HBM2”)存储器接口,并且Y等于U的一半。在至少一个实施例中,HBM2存储器堆栈与PPU位于物理封装上,与传统的GDDR5 SDRAM系统相比,节省了大量的功率和面积。在一个实施例中,每个HBM2堆栈包括四个存储器管芯,并且Y=4,而HBM2堆栈包括每个管芯两个128位通道,总共8个通道和1024位的数据总线宽度。在至少一个实施例中,存储器支持单错误校正双错误检测(“SECDED”)错误校正码(“ECC”)以保护数据。在至少一个实施例中,ECC可以为对数据损坏敏感的计算应用程序提供了更高的可靠性。
在至少一个实施例中,PPU实现多级存储器层次结构。在至少一个实施例中,内存分区单元3500支持统一存储器以为CPU和PPU存储器提供单个统一虚拟地址空间,从而实现虚拟存储器系统之间的数据共享。在至少一个实施例中,追踪PPU对位于其他处理器上的存储器的访问频率,以确保将存储器页面移动到更频繁地访问页面的PPU的物理存储器。在一个实施例中,高速GPU互连3308支持地址转换服务,该地址转换服务允许PPU直接访问CPU的页表并提供由PPU对CPU存储器的完全访问。
在一个实施例中,复制引擎在多个PPU之间或在PPU与CPU之间传送数据。在一个实施例中,复制引擎可以为未被映射到页面表中的地址生成页面错误,并且内存分区单元3500然后为页面错误提供服务,将地址映射到页面表中,之后复制引擎执行传输。在至少一个实施例中,为多个处理器之间的多个复制引擎操作固定(即,不可分页)存储器,从而实质上减少了可用存储器。在一个实施例中,由于硬件页面故障,可以将地址传递给复制引擎,而不必考虑存储页面是否驻留,并且复制过程是透明的。
根据至少一个实施例,来自图33的存储器3304或其他系统存储器的数据由内存分区单元3500提取并存储在L2高速缓存3504中,该L2高速缓存3504位于芯片上并且在各种GPC之间共享。在一个实施例中,每个内存分区单元3500包括与对应的存储器设备相关联的L2高速缓存的至少一部分。在至少一个实施例中,在GPC内的各个单元中实现较低级别的高速缓存。在一个实施例中,每个SM 3414可以实现一级(“L1”)高速缓存,其中L1高速缓存是专用于特定SM 3414的私有存储器,并且获取来自L2高速缓存3504的数据并将其存储在每个L1高速缓存用于在SM 3414的功能单元中进行处理。在一个实施例中,L2高速缓存3504耦合到存储器接口3506和图33中示出的XBar 3320。
在一个实施例中,ROP单元3502执行与像素颜色有关的图形光栅操作,诸如颜色压缩、像素混合等。在一个实施例中,ROP单元3502与光栅引擎3408一起实施深度测试,从光栅引擎3408的剔除引擎接收与像素片段相关联的样本位置的深度。在至少一个实施例中,为针对与片段相关联的样本位置,在深度缓冲区中针对相应深度进行了深度测试。在至少一个实施例中,如果片段通过了针对样本位置的深度测试,则ROP单元3502更新深度缓冲器,并将深度测试的结果发送至栅格光栅引擎3408。将理解的是,分区单元3500的数量可以与GPC的数量不同,因此,在至少一个实施例中,每个ROP单元3502可以耦合到每个GPC。在至少一个实施例中,ROP单元3502追踪从不同GPC接收到的分组,并确定通过Xbar 2820将ROP单元3502生成的结果路由到哪个GPC。
图36示出了根据一个实施例的流传输多处理器(“SM”)3600。在至少一个实施例中,SM 3600是图36的SM。在至少一个实施例中,SM 3600包括但不限于,指令缓存3602;一个或更多个调度器单元3604;寄存器文件3608;一个或更多个处理核心(“核心”)3610;一个或更多个特殊功能单元(“SFU”)3612;一个或更多个加载/存储单元(“LSU”)3614;互连网络3616;共享存储器/一级(“L1”)高速缓存3618;和任何它们的适当组合。
在至少一个实施例中,工作分配单元分派任务以在并行处理单元(“PPU”)的通用处理集群(“GPC”)上执行,并且每个任务被分配给GPC内的特定数据处理集群(“DPC”),以及,如果该任务与着色器程序相关联,则该任务被分配给SM 3600。在一个实施例中,调度器单元3604从工作分配单元接收任务,并管理分配给SM 3600的一个或更多个线程块的指令调度。在至少一个实施例中,调度器单元3604调度线程块以作为并行线程的线程束进行执行,其中每个线程块至少分配一个线程束。在至少一个实施例中,每个线程束执行线程。在至少一个实施例中,调度器单元3604管理多个不同的线程块,将线程束分配给不同的线程块,然后在每个时钟周期将来自多个不同的协作组的指令分配给各个功能单元(例如,核心3610、SFU 3612和LSU 3614)。
在至少一个实施例中,协作组可以指用于组织通信线程的组的编程模型,该编程模型允许开发人员表达正在通信的线程的粒度,从而使表达更丰富,更有效的并行分解。在至少一个实施例中,协作启动API支持线程块之间的同步以执行并行算法。在至少一个实施例中,常规编程模型的应用程序提供了用于同步协作线程的单个简单构造:跨线程块的所有线程的屏障(例如,syncthreads()函数)。但是,在至少一个实施例中,编程人员经常想以小于线程块粒度的大小来定义线程组,并在定义的组内进行同步,从而以集体范围内的功能接口的形式实现更高的性能、设计灵活性和软件重用。在至少一个实施例中,协作组使编程人员定义明确位于子块(例如,小到单个线程)和多块粒度上的线程组,并在协作组中对线程执行集体操作,例如同步。在至少一个实施例中,编程模型支持跨软件边界的清除合成,因此库和实用功能可以在其本地上下文中安全地同步,而不必对收敛进行假设。在至少一个实施例中,协作组基元启用了新的合作并行模式,包括生产者-消费者并行,机会主义并行以及整个线程块网格上的全局同步。
在至少一个实施例中,调度单元3606配置成将指令发送到一个或更多个功能单元,并且调度器单元3604包括但不限于两个调度单元3606,该两个调度单元3606使得来自共同线程束的两个不同指令能够在每个时钟周期内被调度。在至少一个实施例中,每个调度器单元3604包括单个调度单元3606或附加调度单元3606。
在至少一个实施例中,每个SM 3600包括寄存器文件3608,其为SM 3600的功能单元提供一组寄存器。在至少一个实施例中,寄存器文件3608在每个功能单元之间划分,使得每个功能单元被分配寄存器文件3608的专用部分。在至少一个实施例中,寄存器文件3608被SM 3600执行的不同线程束划分,以及寄存器文件3608为连接到功能单元的数据路径的操作数提供临时存储。在至少一个实施例中,每个SM 3600包括数量为L的处理核新心3610(其中,L为正整数)。在至少一个实施例中,SM 3600包括大量但不限于(例如,128个或更多个)不同的处理核心3610。在至少一个实施例中,每个核心3610包括但不限于全管线、单精度、双精度和/或混合精度处理单元,处理单元包括但不限于浮点运算逻辑单元(“ALU”)和整数算术逻辑单元。在至少一个实施例中,浮点算术逻辑单元实施IEEE 754-2008标准用于浮点算术。在至少一个实施例中,处理核心3610包括但不限于64个单精度(32位)浮点核心、64个整数核心、32个双精度(64位)浮点核心和8个张量核心。
根据至少一个实施例,张量核心配置成为执行矩阵运算。在至少一实施例中,核心3610中包括一个或更多个张量核心。在至少一实施例中,张量核心配置成执行深度学习矩阵算术,例如用于神经网络训练和推理的卷积运算。在至少一个实施例中,每个张量核心在4×4矩阵上操作并执行矩阵乘法和累加运算D=A×B+C,其中A,B,C和D是4×4矩阵。
在至少一个实施例中,矩阵乘法输入A和B是16位浮点矩阵,并且累加矩阵C和D是16位浮点或32位浮点矩阵。在至少一个实施例中,张量核心对16位浮点输入数据进行32位浮点累加运算。在至少一个实施例中,16位浮点乘法需要64次运算,并产生全精度乘积,全精度乘积然后使用32位浮点加法与其他用于4×4×4矩阵的中间乘积累加。在至少一个实施例中,张量核心用于执行由这些较小的元件构成的更大的二维或更高维度的矩阵运算。在至少一个实施例中,诸如CUDA 9 C++API之类的API公开专门的矩阵加载、矩阵乘法和累加以及矩阵存储操作,以有效地使用来自ClJDA-C++程序的张量核心。在至少一个实施例中,在CUDA级别,线程束级别接口假设16×16大小的矩阵跨线程束的所有32个线程。
在至少一个实施例中,每个SM 3600包括但不限于执行特殊功能(例如,属性评估、倒数平方根等)的M个SFU 3612。在至少一个实施例中,SFU 3612包括但不限于配置成遍历分层树数据结构的树遍历单元。在至少一个实施例中,SFU 3612包括但不限于配置成执行纹理图过滤操作的纹理单元。在至少一个实施例中,纹理单元配置成从存储器加载纹理图(例如,像素的2D阵列)并且对纹理图进行采样以产生采样的纹理值以供在由SM3600执行的着色器程序中使用。在至少一个实施例中,纹理图存储在共享存储器/L1高速缓存3618中。在至少一个实施例中,纹理单元实施纹理操作,例如使用mip-maps(例如,细节水平变化的纹理图)进行滤波操作。在至少一个实施例中,每个SM 3600包括但不限于两个纹理单元。
在至少一个实施例中,每个SM 3600包括但不限于N个LSU 3614,这些LSU 3614实现共享存储器/Ll高速缓存3618和寄存器文件3608之间的加载和存储操作。在至少一个实施例中,互连网络3616将每个功能单元连接到寄存器文件3608和将LSU 3614连接到寄存器文件3608和共享存储器/L1高速缓存3618。在至少一个实施例中,互连网络3616是可配置为将任何功能单元连接到寄存器堆3608中的任何寄存器并将LSU 3614连接到寄存器文件3608和共享存储器/L1高速缓存3618中的存储器位置的交叉开关。
在至少一个实施例中,共享存储器/Ll高速缓存3618是片上存储器的阵列,其在一个实施例中允许SM 3600与原始引擎之间以及SM 3600中的线程之间的数据存储和通信。在至少一个实施例中,共享存储器/LI高速缓存3618包括但不限于128KB的存储容量,并且位于从SM 3600到分区单元的路径中。在至少一个实施例中,共享存储器/L1高速缓存3618用于高速缓存读取和写入。共享存储器/L1高速缓存3618、L2高速缓存和存储器中的一个或更多个是后备存储器。
在至少一个实施例中,将数据高速缓存和共享存储器功能组合到单个存储器块中,为两种类型的存储器访问提供了改进的性能。在至少一个实施例中,该容量被不使用共享存储器的程序使用或用作高速缓存,例如,如果将共享存储器配置为使用一半容量,则纹理和加载/存储操作可以使用剩余容量。根据至少一个实施例,在共享存储器/L1高速缓存3618内的集成使共享存储器/L1高速缓存3618能够用作用于流传输数据的高吞吐量管线,同时提供对频繁重用的数据的高带宽和低延迟访问。在至少一个实施例中,当配置用于通用并行计算时,与图形处理相比,可以使用更简单的配置。在至少一个实施例中,固定功能图形处理单元被绕过,从而创建了更简单的编程模型。在至少一个实施例中,在通用并行计算配置中,工作分配单元直接将线程的块分配和分布给DPC。在至少一个实施例中,块中的线程执行相同的程序,在计算中使用唯一的线程ID来确保每个线程生成唯一的结果,使用SM 3600执行程序并执行计算,使用共享存储器/L1高速缓存3618在线程之间进行通信,以及LSU 3614通过共享存储器/L1高速缓存3618和内存分区单元来读写全局存储器。在至少一个实施例中,当被配置用于通用并行计算时,SM 3600写入调度器单元3604可以用来在DPC上启动新工作的命令。
在至少一个实施例中,PPU被包括在或耦合到台式计算机、膝上型计算机、平板电脑、服务器、超级计算机、智能电话(例如,无线、手持设备)、个人数字助理(“PDA”)、数码相机、车辆、头戴式显示器、手持式电子设备等中或与之耦合。在至少一个实施例中,PPU被实现在单个半导体衬底上。在至少一个实施例中,PPU与一个或更多个其他设备(例如附加的PPU、存储器、精简指令集计算机(“RISC”)CPU,一个或更多个存储器管理单元(“MMU”)、数模转换器(“DAC”)等)一起被包括在片上系统(“SoC”)中。
在至少一个实施例中,PPU可以被包括在包括一个或更多个存储设备的图形卡上。图形卡可以配置为与台式计算机主板上的PCIe插槽相连接。在至少一个实施例中,PPU可以是包括在主板的芯片组中的集成图形处理单元(“iGPU”)。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关的推理和/或训练操作。本文结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。在至少一个实施例中,深度学习应用处理器用于训练机器学习模型(诸如神经网络),以预测或推理提供给SM3600的信息。在至少一个实施例中,SM 3600用于基于已由另一处理器或系统或由SM 3600训练过的机器学习模型(例如,神经网络)推理或预测信息。在至少一个实施例中,SM 3600可用于执行一个或更多个本文所述的神经网络用例。
在至少一个实施例中,本文所述的处理器或GPU可用于创建实现基于模型和无模型的控制的机器人控制系统。例如,如上所述的处理器或GPU可以用于执行可执行指令,该可执行指令使处理器实现本文所述的基于模型和无模型的控制系统。
公开了实施例,其涉及用于高级计算的虚拟化计算平台,诸如医学应用程序中的图像推断和图像处理。没有限制,实施例可以包括放射线照相、磁共振成像(MRI)、核医学、超声、超声检查、弹性成像、光声成像、断层扫描、超声心动图、功能近红外光谱和磁性粒子成像,或其组合。在至少一个实施例中,本文所述的虚拟化计算平台和相关过程可以附加地或替代地用于但不限于法医科学分析、地下探测和成像(例如,石油勘探、考古、古生物学等)、地形、海洋学、地质学、骨病学、气象学、智能区域或对象跟踪和监视、传感器数据处理(例如RADAR、SONAR、LIDAR等)和/或基因组学和基因测序。
参见图37,图37是根据至少一个实施例的用于生成和部署图像处理和推理管线的过程3700的示例数据流程图。在至少一个实施例中,过程3700可以被部署用于在一个或更多个设施3702(例如,医疗设施、医院、医疗机构、诊所、研究或诊断实验室等)处的成像设备、处理设备、基因设备、基因序列设备、放射线设备和/或其他设备等。在至少一个实施例中,过程3700可以被部署以对测序数据进行基因组分析和推断。可以使用本文所述的系统和过程进行的基因组分析的实例包括但不限于变体调用、突变检测和基因表达定量。
在至少一个实施例中,过程3700可以在训练系统3704和/或部署系统3706内执行。在至少一个实施例中,训练系统3704可以用于执行在部署系统3706中使用的机器学习模型的训练,部署和实现(例如,神经网络、对象检测算法、计算机视觉算法等)。在至少一个实施例中,部署系统3706可配置为在分布式计算环境中卸载处理和计算资源以减少设施3702上的基础设施需求。在至少一个实施例中,部署系统3706可以提供用于选择、定制和实现与成像设备(例如,MRI、CT扫描、X-射线、超声等)一起使用的虚拟仪器或在设施3702处对设备进行排序的简化平台。在至少一个实施例中,虚拟仪器可以包括软件定义的应用程序,用于执行关于由成像设备、测序设备、放射线设备和/或其他设备类型生成的成像数据的分类的一个或更多个处理操作的。在至少一个实施例中,管线中的一个或更多个应用可以在应用的执行期间使用或调用部署系统3706的服务(例如,推理、可视化、计算、AI等)。
在至少一个实施例中,在高级处理和推理管线中使用的一些应用程序可以使用机器学习模型或其他AI来执行一个或更多个处理步骤。在至少一个实施例中,可以使用在设施3702处生成(并且存储在设施3702处的一个或更多个图片归档和通信系统(PACS)服务器上)的数据3708(例如成像数据)在设施3702处训练机器学习模型。使用来自另一个设施或多个设施(例如,不同的医院、实验室、诊所等)或其组合的成像或测序数据3708进行训练。在至少一个实施例中,训练系统3704可以用于提供应用程序、服务和/或其他资源,以生成用于部署系统3706的工作的、可部署的机器学习模型。
在至少一个实施例中,模型注册表3724可以由对象存储支持,该对象存储可以支持版本控制和对象元数据。在至少一个实施例中,可以通过例如来自云平台内的云存储(例如,图38的云3826)兼容的应用程序编程接口(API)来访问对象存储。在至少一个实施例中,模型注册表3724中的机器学习模型可以由与API交互的系统的开发者或合作伙伴上载、列出、修改或删除。在至少一个实施例中,API可以提供对方法的访问,该方法允许具有适当证书的用户将模型与应用程序相关联,使得可以将模型作为应用程序的容器化实例的执行的一部分来执行
在至少一个实施例中,训练管线3804(图38)可以包括以下情形:设施3702正在训练他们自己的机器学习模型,或者具有需要优化或更新的现有机器学习模型。在至少一个实施例中,可以接收由成像设备、测序设备和/或其他设备类型生成的成像数据3708。在至少一个实施例中,一旦接收到成像数据3708,AI辅助注释3710就可以用于帮助生成与成像数据3708相对应的注释,以用作机器学习模型的地面实况数据。在至少一个实施例中,AI辅助注释3710可以包括一个或更多个机器学习模型(例如,卷积神经网络(CNN)),可以对机器学习模型进行训练以生成对应于某些类型的成像数据3708(例如,来自某些设备)和/或成像数据3708中某些类型的异常的注释。在至少一个实施例中,然后可以直接使用AI辅助注释3710,或者可以使用注释工具(例如,由研究人员、临床医生、医生、科学家等)调整或精调,以生成地面实况数据。在至少一个实施例中,在一些示例中,标记的临床数据3712(例如,由临床医生、医生、科学家、技术人员等提供的注释)可以用作用于训练机器学习模型的地面实况数据。在至少一个实施例中,AI辅助注释3710、标记的临床数据3712或其组合可以用作训练机器学习模型的地面实况数据。在至少一个实施例中,训练的机器学习模型可以被称为输出模型3716,并且可以由部署系统3706使用,如本文所述。
在至少一个实施例中,训练管线3804(图38)可以包括以下场景:设施3702需要机器学习模型以用于为部署系统3706中的一个或更多个应用程序执行一个或更多个处理任务,但是设施3702当前可能没有这样的机器学习模型(或者可能没有为此目的而优化、高效或有效的模型)。在至少一个实施例中,可以从模型注册表3724中选择现有的机器学习模型。在至少一个实施例中,模型注册表3724可以包括经训练以对成像数据执行各种不同的推理任务的机器学习模型。在至少一个实施例中,可以在来自不同于设施3702的设施(例如,位于远程的设施)的成像数据上训练模型注册表3724中的机器学习模型。在至少一个实施例中,机器学习模型可能已经在来自一个位置、两个位置或任何数量的位置的成像数据上进行训练。在至少一个实施例中,当从特定位置对成像数据进行训练时,可以在该位置进行训练,或者至少以保护成像数据的机密性或限制来自备用设备(off-premises)转移的成像数据的方式进行训练(例如,遵守HIPAA法规、隐私法规等)。在至少一个实施例中,一旦在一个位置上训练了模型或部分地训练了模型,就可以将机器学习模型添加到模型注册表3724中。在至少一个实施例中,然后可以在任何数量的其他设施上对机器学习模型进行重新训练或更新,可以在模型注册表3724中使用经过重新训练或更新的模型。在至少一个实施例中,然后可以从模型注册表3724中选择机器学习模型,并称为输出模型3716,并且可以在部署系统3706中使用机器学习模型来为部署系统的一个或更多个应用程序执行一个或更多个处理任务。
在至少一个实施例中,可以在包括设施3702的场景中使用训练管线3804(图38),该设施需要机器学习模型以用于对部署系统3706中的一个或更多个应用程序执行一个或更多个处理任务,但是设施3702当前可能没有这样的机器学习模型(或者可能没有为此目的而优化、高效或有效的模型)。在至少一个实施例中,由于群体差异、基因变异,用于训练机器学习模型的训练数据的鲁棒性、训练数据异常的多样性和/或训练数据的其他问题,从模型注册表3724中选择的机器学习模型可能不会针对设施3702处生成的成像数据3708进行微调或优化。在至少一个实施例中,AI辅助注释3710可以用于帮助生成与成像数据3708相对应的注释,以将其用作地面实况数据以用于重新训练或更新机器学习模型。在至少一个实施例中,标记的临床数据3712(例如,由临床医生、医生、科学家等提供的注释)可以用作训练机器学习模型的地面实况数据。在至少一个实施例中,重新训练或更新机器学习模型可以称为模型训练3714。在至少一个实施例中,模型训练3714-例如,AI辅助注释3710、标记的临床数据3712或其组合-可以用作训练或更新机器学习模型的地面实况数据。
在至少一个实施例中,部署系统3706可以包括软件3718、服务3720、硬件3722和/或其他组件、特征和功能。在至少一个实施例中,部署系统3706可以包括软件“堆栈”,使得软件3718可以建立在服务3720的顶部并且可以使用服务3720来执行一些或全部处理任务,并且服务3720和软件3718可以构建在硬件3722之上,并使用硬件3722执行部署系统3706的处理、存储和/或其他计算任务。
在至少一个实施例中,软件3718可以包括任何数量的不同容器,其中每个容器可以执行应用程序的实例化。在至少一个实施例中,每个应用程序可以在高级处理和推理管线中执行一个或更多个处理任务(例如,推理、对象检测、特征检测、分割、图像增强、校准等)。在至少一个实施例中,对于每种类型的成像设备(例如,CT、MRI、X射线、超声、超声检查、超声心动图等)、测序设备、放射学设备、基因组学设备等,可以存在可以针对由设备生成的成像数据3708(或其他数据类型,例如本文所述的那些数据)执行数据处理任务的任何数量的容器。在至少一个实施例中,除了接收和配置成像图像以供每个容器使用和/或设施3702在通过管线处理后使用(例如,将输出转换回可用的数据类型,例如医学数字成像和通信(DICOM)数据、放射信息系统(RIS)数据、临床信息系统(CIS)数据、远程过程调用(RPC)数据、基本符合表示状态传输(REST)接口的数据、基本符合基于文件的接口的数据和/或原始数据,以便在设施3702进行存储和显示)的容器之外,还可以基于对处理成像数据3708期望或要求的不同容器的选择来定义高级处理和推理管线。在至少一个实施例中,软件3718(例如,组成管线)内的容器的组合可以被称为虚拟仪器(如本文中更详细描述的),并且虚拟仪器可以利用服务3720和硬件3722执行在容器中实例化的应用程序的部分或全部处理任务。
在至少一个实施例中,数据处理管线可以响应于推断请求(例如,来自部署系统3706的用户的请求,例如临床医生、医生、放射线医生等)而以DICOM、RIS、CIS、REST兼容、RPC、原始和/或其他格式接收输入数据(例如,成像数据3708)。在至少一个实施例中,输入数据可以代表由一个或更多个成像设备、测序设备、放射学设备、基因组设备和/或其他设备类型生成的一个或多个图像、视频和/或其他数据表示。在至少一个实施例中,数据可以作为数据处理管线的一部分进行预处理,以准备数据以供一个或更多个应用程序处理。在至少一个实施例中,可以对管线的一个或更多个推理任务或其他处理任务的输出执行后处理,以为下一应用程序准备输出数据和/或准备输出数据用于传送和/或由用户使用(例如,作为推理请求的响应)。在至少一个实施例中,推理任务可以由一个或更多个机器学习模型来执行,例如训练或部署的神经网络,其可以包括训练系统3704的输出模型3716。
在至少一个实施例中,数据处理管线的任务可以封装在一个或更多个容器中,每个容器表示能够引用机器学习模型的应用程序和虚拟化计算环境的离散的、全功能的实例化。在至少一个实施例中,容器或应用程序可以被发布到容器注册表的私有(例如,有限访问)区域中(在此更详细地描述),并且训练或部署的模型可以被存储在模型注册表3724中并且与一个或更多个应用程序相关联。在至少一个实施例中,应用程序的图像(例如,容器图像)可以在容器注册表中可用,并且一旦被用户从容器注册表中选择以部署在管线中,则可以使用图像来生成容器以用于对由用户系统使用的应用程序进行实例化。
在至少一个实施例中,开发人员(例如,软件开发人员、临床医师、医生等)可以开发、发布和存储用于对所提供的数据执行图像处理和/或推理的应用程序(例如,作为容器)。在至少一个实施例中,可以使用与系统相关联的软件开发套件(SDK)来执行开发、发布和/或存储(例如,以确保开发的应用程序和/或容器与系统兼容或相匹配)。在至少一个实施例中,可以使用可以支持至少一些服务3720作为系统(例如,图38的系统3800)的SDK在本地(例如,在第一设施处,在来自第一设施的数据上)测试开发的应用程序。在至少一个实施例中,因为DICOM对象可以包含一到数百个图像或其他数据类型的任何地方,并且由于数据的变化,所以开发人员可以负责管理(例如,设置构造,将预处理构建为应用程序等)提取和准备传入的DICOM数据。在至少一个实施例中,一旦通过系统3800的验证(例如,准确性、安全性、患者隐私等),应用程序就可以在容器注册表中用于用户(例如,医院、诊所、实验室、医疗保健提供者等)以针对用户设施(例如第二设施)上的数据执行一个或更多个处理任务。
在至少一个实施例中,开发人员然后可以通过网络共享应用程序或容器,以供系统(例如,图38的系统3800)的用户访问和使用。在至少一个实施例中,可以将完成并经过验证的应用程序或容器存储在容器注册表中,并且可以将相关的机器学习模型存储在模型注册表3724中。在至少一个实施例中,请求实体(例如,医疗机构中的用户)(提供推理或图像处理请求的人)可以浏览容器注册表和/或模型注册表3724以查找应用程序、容器、数据集、机器学习模型等,选择所需的元素组合以包含在数据处理管线中,并提交成像处理请求。在至少一个实施例中,请求可以包括执行请求所必需的输入数据(以及在一些示例中,与患者相关的数据),和/或可以包括选择对应用程序和/或机器学习模型以在处理请求时执行。在至少一个实施例中,然后可以将请求传递到部署系统3706的一个或更多个组件(例如,云)以执行数据处理管线的处理。在至少一个实施例中,由部署系统3706进行的处理可以包括从容器注册表和/或模型注册表3724中引用所选择的元素(例如,应用、容器、模型等)。在至少一个实施例中,一旦由在管线生成结果,结果可以返回给用户以供参考(例如,用于在本地,本地部署(on-premises)工作站或终端上执行的查看应用程序套件中进行查看)。在至少一个实施例中,放射线医师可以从包括任何数量的应用程序和/或容器的数据处理管线接收结果,其中结果可以包括X射线、CT扫描、MRI等的异常检测。
在至少一个实施例中,为了帮助处理或执行管线中的应用程序或容器,可以利用服务3720。在至少一个实施例中,服务3720可以包括计算服务、人工智能(AI)服务、可视化服务和/或其他服务类型。在至少一个实施例中,服务3720可以提供软件3718中的一个或更多个应用所共有的功能,因此可以将功能抽象为可以被应用程序调用或利用的服务。在至少一个实施例中,由服务3720提供的功能可以动态且更有效地运行,同时还通过允许应用程序并行处理数据(例如,使用并行计算平台3830(图38))来很好地缩放。在至少一个实施例中,不是要求共享服务3720所提供的相同功能的每个应用程序具有服务3720的相应实例,而是可以在各种应用程序之间共享服务3720。在至少一个实施例中,作为非限制性示例,服务可以包括可以用于执行检测或分割任务的推理服务器或引擎。在至少一个实施例中,可以包括模型训练服务,其可以提供机器学习模型训练和/或再训练能力。在至少一个实施例中,可以进一步包括数据增强服务,其可以提供GPU加速的数据(例如,DICOM、RIS、CIS、REST兼容、RPC、原始等),提取、调整大小、缩放和/或其他增强。在至少一个实施例中,可以使用可视化服务,该可视化服务可以添加图像渲染效果(例如,射线追踪、光栅化、去噪、锐化等),以向二维(2D)和/或三维(3D)模型添加真实感。在至少一个实施例中,可以包括虚拟仪器服务,其为虚拟仪器的管线内的其他应用程序提供波束形成、分段、推理、成像和/或支持。
在至少一个实施例中,在服务3720包括AI服务(例如,推理服务)的情况下,与用于异常检测(例如,肿瘤、生长异常、瘢痕形成等)的应用程序相关联的一个或更多个机器学习模型可以通过调用(例如,作为API调用)推理服务(例如,推理服务器)以执行机器学习模型或其处理,作为应用程序执行的一部分来执行。在至少一个实施例中,在另一应用程序包括用于分割任务的一个或更多个机器学习模型的情况下,应用程序可以调用推理服务来执行用于执行与分割任务相关联的一个或更多个处理操作的机器学习模型。在至少一个实施例中,可以使实现包括分段应用程序和异常检测应用程序的高级处理和推理管线的软件3718成流线型,因为每个应用程序可以调用相同的推理服务来执行一个或更多个推理任务。
在至少一个实施例中,硬件3722可以包括GPU、CPU、图形卡、AI/深度学习系统(例如,AI超级计算机、例如NVIDIA的DGX超级计算机系统)、云平台或其组合。在至少一个实施例中,可以使用不同类型的硬件3722为部署系统3706中的软件3718和服务3720提供有效的、特定目的的支持。在至少一个实施例中,可以实现GPU处理的使用以进行本地处理(例如在设施3702),在AI/深度学习系统中、在云系统中和/或在部署系统3706的其他处理组件中,以提高图像处理、图像重建、分割、MRI检查、中风或心脏病发作检测(例如实时)、渲染中的图像质量等的效率、准确性和功效。在至少一个实施例中,设施可以包括成像设备、基因组设备、测序设备和/或可以利用GPU生成代表受试者解剖结构的成像数据其他本地部署设备类型。
在至少一个实施例中,作为非限制性示例,可以针对深度学习、机器学习和/或高性能计算针来优化软件3718和/或服务3720以用于GPU处理。在至少一个实施例中,部署系统3706和/或训练系统3704的计算环境中的至少一些可以在数据中心中执行具有GPU优化的软件(例如,NVIDIA的DGX系统的硬件和软件的组合)的一个或多个超级计算机或高性能计算系统。在至少一个实施例中,数据中心可以符合HIPAA的规定,使得针对患者数据的隐私性安全地处理接收、处理和传输成像数据和/或其他患者数据。在至少一个实施例中,硬件3722可包括可被调用以并行执行数据处理的任意数量的GPU,如本文所述。在至少一个实施例中,云平台还可包括用于深度学习任务、机器学习任务或其他计算任务的GPU优化执行的GPU处理。在至少一个实施例中,云平台(例如,NVIDIA的NGC)可以使用作为硬件抽象和缩放平台AI/深度学习超级计算机和/或GPU优化的软件(例如,如在NVIDIA的DGX系统上提供的)来执行。在至少一个实施例中,云平台可以在多个GPU上集成应用程序容器集群系统或编排系统(例如,KUBERNETES),以实现无缝缩放和负载平衡。
图38是根据至少一个实施例的用于生成和部署成像部署管线的示例系统3800的系统图。在至少一个实施例中,系统3800可以用于实现图37的过程3700和/或其他过程,包括高级处理和推理管线。在至少一个实施例中,系统3800可以包括训练系统3704和部署系统3706。在至少一个实施例中,可以使用软件3718、服务3720和/或硬件3722来实现训练系统3704和部署系统3706。
在至少一个实施例中,系统3800(例如,训练系统3704和/或部署系统3706)可以在云计算环境中(例如,使用云3826)实现。在至少一个实施例中,系统3800可以针对医疗服务设施在本地实现,或者作为云和本地计算资源的组合来实现。在至少一个实施例中,在实施云计算实现的实施例中,患者数据可以与系统3800的一个或更多个组件分离或不被系统3800的一个或更多个组件处理,这将使得处理不符合HIPAA和/或其他数据处理和隐私法规或法律。在至少一个实施例中,可以通过制定的安全措施或协议将对云3826中的API的访问限制为授权用户。在至少一个实施例中,安全协议可以包括可以由认证服务(例如,AuthN,AuthZ,Gluecon等)签名的网络令牌,并且可以携带适当的授权。在至少一个实施例中,虚拟仪器的API(在此描述)或系统3800的其他实例可以被限制到已经被审核或被授权用于交互的一组公共IP。
在至少一个实施例中,系统3800的各个组件可以使用各种不同的网络类型(包括但不限于局域网(LAN)和/或广域网(WAN))中的任何一种经由线和/或无线通信协议在彼此之间进行通信。在至少一个实施例中,系统3800的设施和组件之间的通信(例如,用于发送推理请求,用于接收推理请求的结果等)可以通过一条或多条数据总线、无线数据协议(Wi-Fi)、有线数据协议(例如以太网)等进行通信。
在至少一个实施例中,训练系统3704可以执行训练管线3804,类似于本文中相对于图37所描述的那些。在至少一个实施例中,其中部署系统3706将在部署管线3810中使用一个或更多个机器学习模型,训练管线3804可用于训练或再训练一个或更多个(例如,预训练的)模型,和/或实现一个或多个预训练模型3806(例如,无需重新训练或更新)。在至少一个实施例中,作为训练管线3804的结果,可以生成输出模型3716。在至少一个实施例中,训练管线3804可以包括任何数量的处理步骤,诸如但不限于成像数据(或其他输入数据)的转换或适应(例如,使用DICOM适配器3802A将DICOM图像转换为适合于通过相应的机器学习模型进行处理,例如神经影像信息技术计划(NIfTI)格式,AI辅助注释3710、成像数据的标签或注释3708以生成标记的临床数据3712,从模型注册表中选择模型,模型训练3714,训练、再训练或更新模型和/或其他处理步骤。在至少一个实施例中,对于由部署系统3706使用的不同的机器学习模型,可以使用不同的训练管线3804。在至少一个实施例中,类似于关于图37描述的第一示例的训练管线3804可以被用于第一机器学习模型,类似于关于图37描述的第二示例的训练管线3804可以被用于第二机器学习模型,类似于关于图37描述的第三示例的训练管线3804可以被用于第三机器学习模型。在至少一个实施例中,可以根据每个相应的机器学习模型的要求来使用训练系统3704内的任务的任何组合。在至少一个实施例中,机器学习模型中的一个或更多个可以已经被训练并且准备好部署,因此机器学习模型可以不由训练系统3704进行任何处理,并且可以由部署系统3706来实现。
在至少一个实施例中,取决于实施方式或实施例,输出模型3716和/或预训练模型3806可以包括任何类型的机器学习模型。在至少一个实施例中,但不限于,系统3800使用的机器学习模型可以包括使用线性回归、逻辑回归、决策树、支持向量机(SVM)、朴素贝叶斯、k最近邻(Knn)、K表示聚类、随机森林、降维算法、梯度提升算法、神经网络(例如,自动编码器、卷积、递归、感知器、长期/短期记忆(LSTM)、Hopfield、Boltzmann、深层信念、反卷积、生成对抗、液体状态机等)和/或其他类型的机器学习模型。
在至少一个实施例中,训练管线3804可以包括AI辅助注释,如本文相对于至少图41B更详细地描述的。在至少一个实施例中,可以通过许多技术来生成标记的临床数据3712(例如,传统注释)。在至少一个实施例中,可以在绘图程序(例如,注释程序)、计算机辅助设计(CAD)程序、标记程序、适合于为地面实况生成注释或标签的另一种类型的程序内生成标签或其他注释,和/或在一些示例中,标签或其他注释可以是手绘的。在至少一个实施例中,地面实况数据可以是合成产生的(例如,从计算机模型或渲染产生的)、真实产生的(例如,从真实世界的数据设计和产生的)、机器自动化的(例如,使用特征分析和学习以从数据中提取特征,然后生成标签)、人工注释(例如,贴标机或注释专家,定义标签的位置)和/或其组合。在至少一个实施例中,对于成像数据3708(或机器学习模型使用的其他数据类型)的每个实例,可以存在由训练系统3704生成的相应的地面实况数据。在至少一个实施例中,可以使用AI辅助注释作为部署管线3810的一部分执行;或者补充或代替训练管线3804中包括的AI辅助注释。在至少一个实施例中,系统3800可以包括多层平台,该多层平台可以包括执行一项或更多项医学成像和诊断功能的诊断应用程序(或其他应用程序类型)的软件层(例如,软件3718)。在至少一个实施例中,系统3800可以(例如,经由加密的链路)通信地耦合到一个或更多个设施的PACS服务器网络。在至少一个实施例中,系统3800可以被配置为从PACS服务器(例如,DICOM数据、RIS数据、原始数据、CIS数据、符合REST的数据、RPC数据、原始数据等)访问和引用数据(例如,通过DICOM适配器3802或其他数据类型(例如RIS、CIS、REST兼容、RPC,原始等)适配器)执行操作,例如训练机器学习模型、部署机器学习模型、图像处理、推理和/或其他操作。
在至少一个实施例中,软件层可以被实现为安全、加密和/或认证的API,通过该API可以从外部环境(例如,设施3702)唤醒(例如,调用)应用程序或容器。在至少一个实施例中,应用程序然后可以调用或执行一个或更多个服务3720以执行与各个应用程序相关联的计算、AI或可视化任务,并且软件3718和/或服务3720可以利用硬件3722来以有效和高效的方式执行处理任务。
在至少一个实施例中,部署系统3706可以执行部署管线3810。在至少一个实施例中,部署管线3810可以包括可以顺序地、非顺序地或以其他方式应用于由成像设备,测序设备,基因组设备等生成的成像数据(包括如上所述的AI辅助注释)的任何数量的应用程序(和/或其他数据类型)。在至少一个实施例中,如本文所述,用于单个设备的部署管线3810可以被称为用于设备的虚拟仪器(例如,虚拟超声仪器、虚拟CT扫描仪器、虚拟测序仪器等)。在至少一个实施例中,对于单个设备,取决于从设备生成数据期望的信息,可以有一个以上的部署管线3810。在至少一个实施例中,在期望从MRI机器检测到异常的情况下,可以存在第一部署管线3810,并且在期望从MRI机器的输出进行图像增强的地方,可以存在第二部署管线3810。
在至少一个实施例中,可用于部署管线3810的应用程序可包括可用于对来自设备的成像数据或其他数据执行处理任务的任何应用程序。在至少一个实施例中,不同的应用程序可以负责图像增强、分割、重建、异常检测、物体检测、特征检测、治疗计划、剂量测定、射束计划(或其他放射治疗程序)和/或其他分析、图像处理或推断任务。在至少一个实施例中,部署系统3706可以为每个应用程序定义构造,使得部署系统3706的用户(例如,医疗设施、实验室、诊所等)可以理解构造并且使应用程序适于在其各自设施内的实施。在至少一个实施例中,可以选择用于图像重建的应用程序以包括在部署管线3810中,但是由成像设备生成的数据类型可以与在应用程序内使用的数据类型不同。在至少一个实施例中,可以在部署管线3810内使用DICOM适配器3802B(和/或DICOM读取器)或另一数据类型(例如,RIS、CIS、REST兼容、RPC、原始等)适配器或读取器,以将数据转换到部署系统3706内的应用程序可使用的形式。在至少一个实施例中,可以累积和预处理对DICOM、RIS、CIS、REST兼容、RPC、原始和/或其他数据类型库的访问,包括解码、提取和/或执行任何卷积、颜色校正、清晰度、伽玛和/或其他对数据的增强。在至少一个实施例中,DICOM、RIS、CIS、符合REST的RPC、和/或原始数据可以是无序的,并且可以执行预通过以组织或对所收集的数据进行分类。在至少一个实施例中,因为各种应用程序可以共享共同的图像操作,所以在一些实施例中,可以使用数据增强库(例如,作为服务3720之一)来加速这些操作。在至少一个实施例中,为了避免依赖于CPU处理的常规处理方法的瓶颈,并行计算平台3830可以用于这些处理任务的GPU加速。
在至少一个实施例中,图像重建应用程序可以包括包括使用机器学习模型的处理任务。在至少一个实施例中,用户可能希望使用他们自己的机器学习模型,或者从模型注册表3724中选择机器学习模型。在至少一个实施例中,用户可以实现他们自己的机器学习模型或选择机器学习模型用于包含在执行处理任务的应用程序中。在至少一个实施例中,应用程序可以是可选的和可定制的,并且通过定义应用程序的构造,针对特定用户的应用程序的部署和实现被呈现为更加无缝的用户体验。在至少一个实施例中,通过利用系统3800的其他特征,例如服务3720和硬件3722,部署管线3810可以对用户更加友好、提供更容易的集成、并产生更准确、有效和及时的结果。
在至少一个实施例中,部署系统3706可以包括用户界面3814(例如,图形用户界面、网络界面等),该用户界面可以被用于选择要包括在部署管线3810中的应用程序,在设置和/或部署期间,布置应用程序,修改或改变应用程序或参数或其构造,在设置和/或部署期间使用部署管线3810并与之交互,和/或以其他方式与部署系统3706交互。对于训练系统3704(未示出),用户界面3814(或不同的用户界面)可用于选择在部署系统3706中使用的模型,在训练系统3704中选择用于训练或再训练的模型,和/或用于以其他方式与训练系统3704交互。
在至少一个实施例中,除了应用程序编排系统3828之外,还可以使用管线管理器3812来管理部署管线3810的应用程序或容器与服务3720和/或硬件3722之间的交互。在至少一个实施例中,管线管理器3812可以被配置为促进从应用程序到应用程序,从应用程序到服务3720和/或从应用程序或服务到硬件3722的交互。在至少一个实施例中,尽管被示为包括在软件3718中,这并不意味着限制,并且在一些示例中,管线管理器3812可以包括在服务3720中。在至少一个实施例中,应用程序编排系统3828(例如,Kubernetes、DOCKER等)可以被包括可能包括容器编排系统,该系统可以将应用程序分组为多个容器,作为逻辑单元进行协调、管理、扩展和部署。在至少一个实施例中,通过将来自部署管线3810的应用程序(例如,重建应用程序、分段应用程序等)与各个容器相关联,每个应用程序可以在自包含的环境中(例如,在内核级别下)执行以提高速度和效率。
在至少一个实施例中,每个应用程序和/或容器(或其映像)可以单独开发、修改和部署(例如,第一用户或开发人员可以开发、修改和部署第一应用程序和第二用户或开发人员可以开发、修改和部署与第一用户或开发人员分开的第二应用程序),这可以使专注于并关注单个应用程序和/或容器的任务,而不会受到阻碍另一个应用程序或容器的任务。在至少一个实施例中,管线管理器3812和应用编排系统3828可以辅助不同容器或应用程序之间的通信和协作。在至少一个实施例中,只要每个容器或应用程序的预期输入和/或输出是为系统(例如,基于应用程序或容器的构造)所已知的,应用程序编排系统3828和/或管线管理器3812可以促进每个应用程序或容器之中和之间的通信以及资源共享。在至少一个实施例中,由于部署管线3810中的一个或更多个应用程序或容器可以共享相同的服务和资源,因此应用程序编排系统3828可以协调、负载平衡并确定各种应用程序之间或容器之间的服务或资源的共享。在至少一个实施例中,调度器可以用于跟踪应用程序或容器的资源需求,这些资源的当前使用或计划使用以及资源可用性。因此,在至少一个实施例中,调度器可以鉴于系统的需求和可用性而将资源分配给不同的应用程序,并且在应用程序之中以及应用程序之间分配资源。在一些示例中,调度器(和/或应用编排系统3828的其他组件)可以基于施加在系统上的约束(例如,用户约束),例如服务质量(QoS)、用于数据输出的需求的紧迫性(例如,确定是执行实时处理还是延迟处理)等,来确定资源可用性和分配。
在至少一个实施例中,由部署系统3706中的应用程序或容器利用并由其共享的服务3720可以包括计算服务3816、AI服务3818、可视化服务3820和/或其他服务类型。在至少一个实施例中,应用程序可以调用(例如,执行)服务3720中的一个或更多个以执行针对应用程序的处理操作。在至少一个实施例中,应用程序可以利用计算服务3816来执行超级计算或其他高性能计算(HPC)任务。在至少一个实施例中,可以利用计算服务3816来执行并行处理(例如,使用并行计算平台3830),以通过一个或更多个应用程序和/或单个应用程序的一个或更多个任务来基本同时地处理数据。在至少一个实施例中,并行计算平台3830(例如,NVIDIA的CUDA)可以实现在GPU(GPGPU)(例如,GPU 3822)上的通用计算。在至少一个实施例中,并行计算平台3830的软件层可以提供对GPU的虚拟指令集和并行计算元件的访问,以执行计算内核。在至少一个实施例中,并行计算平台3830可以包括存储器,并且在一些实施例中,可以在多个容器之间和之中,和/或在单个容器内的不同处理任务之间和之中共享存储器。在至少一个实施例中,可以为多个容器和/或容器内的多个过程生成进程间通信(IPC)调用,以使用来自并行计算平台3830的共享存储器段的相同数据(例如,其中一个应用程序或多个应用程序的多个不同阶段正在处理相同的信息)。在至少一个实施例中,不是复制数据并将数据移动到存储器中的不同位置(例如,读/写操作),而是可以将存储器相同位置中的相同数据用于任何数量的处理任务(例如,在同一时间,在不同时间等)。在至少一个实施例中,由于数据被用作处理的结果来生成新数据,因此可以在各种应用程序之间存储和共享数据的新位置的信息。在至少一个实施例中,数据的位置以及更新或修改的数据的位置可以是容器中如何理解有效载荷的定义的一部分。
在至少一个实施例中,可以利用AI服务3818来执行推理服务,以执行与应用程序相关联的机器学习模型(例如,被赋予执行应用程序的一个或更多个处理任务的任务)。在至少一个实施例中,AI服务3818可以利用AI系统3824来执行机器学习模型(例如,诸如CNN的神经网络)以用于分割、重构、对象检测、特征检测、分类和/或其他推理任务。在至少一个实施例中,部署管线3810的应用程序可以使用来自训练系统3704的输出模型3716中的一个或更多个和/或其他应用程序的模型来对成像数据(例如,DICOM数据、RIS数据、CIS数据、REST兼容的数据、RPC数据,原始数据等)进行推理。在至少一个实施例中,使用应用编排系统3828(例如,调度器)进行推理的两个或更多个示例可以是可用的。在至少一个实施例中,第一类别可以包括可以实现更高服务水平协议的高优先级/低等待时间路径,例如用于在紧急情况下对紧急请求执行推理,或者在诊断期间提供给放射线医生。在至少一个实施例中,第二类别可以包括标准优先级路径,该标准优先级路径可以用于可能不紧急的请求或者可以在稍后的时间执行分析的请求。在至少一个实施例中,应用协调系统3828可以基于用于AI服务3818的不同推理任务的优先级路径来分配资源(例如,服务3720和/或硬件3722)。
在至少一个实施例中,共享存储可以被安装到系统3800内的AI服务3818。在至少一个实施例中,共享存储可以用作高速缓存(或其他存储设备类型),并且可以用于处理来自应用程序的推理请求。在至少一个实施例中,当提交推理请求时,部署系统3706的一组API实例可以接收到请求,并且可以选择一个或更多个实例(例如,用于最佳配合,用于负载平衡等)以处理请求。在至少一个实施例中,为了处理请求,可以将请求输入数据库中,可以从模型注册表3724中找到机器学习模型(如果尚未在缓存中),验证步骤可以确保将适当的机器学习模型加载到高速缓存(例如,共享存储)和/或模型的副本可以保存到高速缓存中。在至少一个实施例中,如果应用程序还没有运行或者没有足够的应用程序的实例,则可以使用调度器(例如,管线管理器3812的调度器)来启动在请求中引用的应用程序。在至少一个实施例中,如果尚未启动推理服务器以执行模型,则可以启动推理服务器。在至少一个实施例中,每个模型可以启动任何数量的推理服务器。在至少一个实施例中,在其中推理服务器被集群化的拉模型中,只要负载平衡是有利的,就可以缓存模型。在至少一个实施例中,推断服务器可以被静态地加载在对应的分布式服务器中。
在至少一个实施例中,可以使用在容器中运行的推理服务器来执行推理。在至少一个实施例中,推理服务器的实例可以与模型(以及可选地模型的多个版本)相关联。在至少一个实施例中,如果当接收到对模型执行推理的请求时推理服务器的实例不存在,则可以加载新实例。在至少一个实施例中,当启动推理服务器时,可以将模型传递到推理服务器,使得可以使用相同的容器来服务于不同的模型,只要推理服务器作为不同的实例运行即可。
在至少一个实施例中,在应用程序执行期间,可以接收针对给定应用程序的推理请求,并且可以加载容器(例如,托管推理服务器的实例)(如果尚未加载),以及启动程序可能会被调用。在至少一个实施例中,容器中的预处理逻辑可以对传入的数据进行加载、解码和/或执行任何附加的预处理(例如,使用一个或多个CPU和/或一个或多个GPU)。在至少一个实施例中,一旦准备好数据进行推理,容器就可以根据需要对数据进行推理。在至少一个实施例中,这可以包括对一个图像(例如,手X射线)的单个推理调用,或者可以要求对数百个图像(例如,胸部CT)进行推理。在至少一个实施例中,应用可以在完成之前总结结果,其可以包括但不限于单个置信度得分、像素水平分割、体素水平分割、生成可视化或生成文本以总结发现。在至少一个实施例中,可以为不同的模型或应用分配不同的优先级。例如,某些模型可能具有实时(TAT小于一分钟)优先级,而其他模型可能具有较低的优先级(例如,TAT小于10分钟)。在至少一个实施例中,可以从请求机构或实体测量模型执行时间,并且该模型执行时间可以包括伙伴网络遍历时间以及在推理服务上的执行。
在至少一个实施例中,服务3720与推理应用程序之间的请求传输可以被隐藏在软件开发工具包(SDK)的后面,并且可以通过队列来提供健壮的传输。在至少一个实施例中,将经由用于单个应用程序/租户ID组合的API的请求放置在队列中,并且SDK将从队列中拉出请求并将请求提供给应用程序。在至少一个实施例中,可以在SDK从中拾取队列的环境中提供队列的名称。在至少一个实施例中,通过队列的异步通信可能是有用的,因为它可以允许应用程序的任何实例在可用时拾取工作。在至少一个实施例中,可以通过队列将结果传送回去,以确保没有数据丢失。在至少一个实施例中,队列还可以提供对工作进行分段的能力,因为最高优先级的工作可以进入与应用程序的大多数实例连接的队列,而最低优先级的工作可以进入与单个实例连接的按收到的顺序处理任务的队列。在至少一个实施例中,应用可以在云3826中生成的GPU加速的实例上运行,并且推理服务可以在GPU上执行推理。
在至少一个实施例中,可视化服务3820可被利用来生成可视化以查看应用程序和/或部署管线3810的输出。在至少一个实施例中,可视化服务3820可利用GPU 3822来生成可视化。在至少一个实施例中,可视化服务3820可以实现诸如射线追踪之类的渲染效果,以生成更高质量的可视化。在至少一个实施例中,可视化可以包括但不限于2D图像渲染、3D体积渲染、3D体积重建、2D断层摄影切片、虚拟现实显示、增强现实显示等。在至少一个实施例中,可以使用虚拟化环境,生成虚拟交互式显示器或环境(例如虚拟环境),以供系统用户(例如医生、护士、放射科医生等)进行交互。在至少一个实施例中,可视化服务3820可以包括内部可视化器、电影和/或其他渲染或图像处理能力或功能(例如,射线追踪、光栅化、内部光学器件等)。
在至少一个实施例中,硬件3722可以包括GPU 3822、AI系统3824、云3826和/或用于执行训练系统3704和/或部署系统3706的任何其他硬件。在至少一个实施例中,GPU 3822(例如NVIDIA的TESLA和/或QUADRO GPU)可以包括任意数量的GPU,这些GPU可用于执行计算服务3816、AI服务3818、可视化服务3820、其他服务和/或任何功能或特性的处理任务软件3718。例如,关于AI服务3818,GPU 3822可用于对成像数据(或机器学习模型使用的其他数据类型)执行预处理,对机器学习模型的输出进行后处理和/或执行推理(例如执行机器学习模型)。在至少一个实施例中,云3826、AI系统3824和/或系统3800的其他组件可以使用GPU3822。在至少一个实施例中,云3826可以包括用于深度学习任务的GPU优化平台。在至少一个实施例中,AI系统3824可以使用GPU,并且可以使用一个或更多个AI系统3824来执行云3826(或至少一部分负责深度学习或推理的任务)。同样,尽管硬件3722被示出为离散的组件,这并不旨在限制本发明,并且硬件3722的任何组件可以与硬件3722的任何其他组件组合或由其利用。
在至少一个实施例中,AI系统3824可以包括被配置用于推理、深度学习、机器学习和/或其他人工智能任务的专用计算系统(例如,超级计算机或HPC)。在至少一个实施例中,除了CPU、RAM、存储器和/或其他组件、功能部件或功能之外,AI系统3824(例如,NVIDIA的DGX)可以包括可以使用多个GPU 3822执行的GPU优化的软件(例如,软件堆栈)。在至少一个实施例中,可以在云3826中(例如,在数据中心中)实现一个或更多个AI系统3824,以执行系统3800的一些或全部基于AI的处理任务。
在至少一个实施例中,云3826可以包括GPU加速的基础设施(例如,NVIDIA的NGC),其可以提供用于执行系统3800的处理任务的GPU优化的平台。在至少一个实施例中,云3826可以包括AI系统3824,用于执行系统3800的一个或更多个基于AI的任务(例如,作为硬件抽象和缩放平台)。在至少一个实施例中,云3826可以与利用多个GPU的应用编排系统3828集成,以实现应用和服务3720之间和之中的无缝缩放和负载平衡。在至少一个实施例中,如本文所述,云3826可以承担执行系统3800的至少一些服务3720的任务,系统3800包括计算服务3816、AI服务3818和/或可视化服务3820。在至少一个实施例中,云3826可以执行小批量和大批量推断(例如,执行NVIDIA的TENSOR RT),提供加速的并行计算API和平台3830(例如,NVIDIA的CUDA),执行应用编排系统3828(例如,KUBERNETES),提供图形渲染API和平台(例如,用于光线追踪、2D图形、3D图形和/或其他渲染技术以产生更高质量的电影效果),和/或可以为系统3800提供其他功能。
在至少一个实施例中,为了保护患者机密性(例如,在备用设备使用患者数据或记录的地方),云3826可以包括注册表-诸如深度学习容器注册表。在至少一个实施例中,注册表可以存储用于对可以对患者数据执行预处理、后处理或其他处理任务的应用的容器进行实例化。在至少一个实施例中,云3826可以接收包括患者数据以及容器中的传感器数据的数据,仅对那些容器中的传感器数据执行所请求的处理,然后将结果输出和/或可视化转发给适当的参与者和/或设备(例如用于可视化或诊断的本地部署医疗设备),而无需提取、存储或访问患者数据。在至少一个实施例中,根据HIPAA和/或其他数据法规来保留患者数据的机密性。
图39包括根据至少一个实施例的用于处理成像数据的部署管线3810A的示例说明。在至少一个实施例中,系统3800,特别是部署系统3706,可以用于定制、更新和/或集成部署管线3810A到一个或多个产品环境中。在至少一个实施例中,图39的部署管线3810A可以包括部署管线3810A的非限制性示例,其可以由设施(例如,医院、诊所、实验室、研究环境等)处的特定用户(或用户团队)定制定义。在至少一个实施例中,为了定义用于CT扫描仪3902的部署管线3810A,用户可以例如从容器注册表中选择一个或更多个应用程序,这些应用程序执行相对于由CT扫描仪3902生成的成像数据的特定功能或任务。在至少一个实施例中,应用程序可以作为可以利用系统3800的服务3720和/或硬件3722的容器的容器应用到部署管线3810A。此外,部署管线3810A可以包括附加处理任务或应用程序,这些任务或应用程序可以被实现以准备供应用程序使用的数据(例如DICOM适配器3802B和DICOM阅读器3906可在部署管线3810A中使用,以准备供CT重建3908、器官分割3910等使用的数据)。在至少一个实施例中,可以定制或选择部署管线3810A以用于一致的部署,一次使用或另一频率或间隔。在至少一个实施例中,用户可能希望在特定间隔内具有针对几个对象的CT重建3908和器官分割3910,并且因此可以在该时间段内部署管线3810A。在至少一个实施例中,用户可以针对来自系统3800的每个请求选择用户想要针对该请求对该数据执行处理的应用程序。在至少一个实施例中,可以以任何间隔调整部署管线3810A,并且由于系统3800内的容器结构的适应性和可伸缩性,这可以是无缝的过程。
在至少一个实施例中,图39的部署管线3810A可以包括CT扫描仪3902,其生成患者或受试者的成像数据。在至少一个实施例中,来自CT扫描仪3902的成像数据可以存储在与容纳CT扫描仪3902的设施相关联的PACS服务器3904上。在至少一个实施例中,PACS服务器3904可以包括软件和/或可以直接与设施处的成像模态对接的硬件组件(例如CT扫描仪3902)。在至少一个实施例中,DICOM适配器3802B可以使能使用DICOM协议发送和接收DICOM对象。在至少一个实施例中,DICOM适配器3802B可以帮助准备或配置来自PACS服务器3904的DICOM数据,以供部署管线3810A使用。在至少一个实施例中,一旦通过DICOM适配器3802B处理了DICOM数据,管线管理器3812就可以将数据路由到部署管线3810A。在至少一个实施例中,DICOM读取器3906可以从DICOM数据(例如,如在可视化3916A中所示的原始正弦图数据)提取图像文件和任何相关联的元数据。在至少一个实施例中,被提取的工作文件可以被存储在高速缓存中,以被部署管线3810A中的其他应用程序更快地处理。在至少一个实施例中,一旦DICOM读取器3906完成了数据的提取和/或存储,就可以将完成信号传送到管线管理器3812。在至少一个实施例中,管线管理器3812然后可以发起或调用一个或更多个其他部署管线3810A中的应用程序或容器。
在至少一个实施例中,一旦数据(例如,原始正弦图数据)可用于CT重建3908应用的处理,就可以执行CT重建3908应用和/或容器。在至少一个实施例中,CT重建3908可以从高速缓存中读取原始正弦图数据,从原始正弦图数据中重建图像文件(例如,如可视化3916B所示),并且将得到的图像文件存储在高速缓存中。在至少一个实施例中,在重建完成时,可以向管线管理器3812发信号通知重建任务已完成。在至少一个实施例中,一旦重建完成,并且重建的图像文件可以被存储在高速缓存器(或其他存储设备)中,则器官分割3910应用程序和/或容器可以由管线管理器3812触发。器官分割3910应用程序和/或容器可以从高速缓存中读取图像文件,将图像文件规范化或转换为适合推理的格式(例如,将图像文件转换为机器学习模型的输入分辨率),然后运行对标准化的图像的推理。在至少一个实施例中,为了对归一化的图像进行推理,器官分割3910应用程序和/或容器可以依赖服务3720,并且管线管理器3812和/或应用编排系统3828可以通过器官分割3910应用程序和/或容器来促进服务3720的使用。在至少一个实施例中,例如,器官分割3910应用程序和/或容器可以利用AI服务3818来对归一化图像执行推理,并且AI服务3818可以利用硬件3722(例如,AI系统3824)来执行AI服务3818。在至少一个实施例中,推理的结果可以是可以存储在高速缓存(或其他存储设备)中的掩码文件(例如,如可视化3916C所示)。
在至少一个实施例中,一旦处理DICOM数据和/或从DICOM数据中提取的数据的应用程序已经完成处理,就可以为管线管理器3812生成信号。在至少一个实施例中,管线管理器3812然后可以执行DICOM写入器3912从高速缓存(或其他存储设备)读取结果,将结果打包成DICOM格式(例如,作为DICOM输出3914),以供生成请求的设施处的用户使用。在至少一个实施例中,然后可以将DICOM输出3914发送到DICOM适配器3802B,以准备DICOM输出3914以存储在PACS服务器3904上(例如,以供设施处的DICOM查看器查看)。在至少一个实施例中,响应于对重建和分段的请求,可视化3916B和3916C可以被生成并且对于用户可用于诊断、研究和/或用于其他目的。
尽管图示为在部署管线3810A中的连续应用,但是在至少一个实施例中,可以并行地处理CT重建3908和器官分割3910应用程序。在至少一个实施例中,在应用程序彼此不依赖并且数据可用于每个应用程序的情况下(例如,在DICOM阅读器3906提取数据之后),可以在相同的时间,基本上在相同的时间或者有一些重叠的情况下执行应用程序。在至少一个实施例中,在两个或更多个应用需要类似服务3720的情况下,系统3800的调度器可以用于负载平衡并且在各种应用程序之间以及在各个应用程序之间分配计算或处理资源。在至少一个实施例中,在一些实施例中,并行计算平台3830可以用于对应用程序执行并行处理,以减少部署管线3810A的运行时间以提供实时结果。
在至少一个实施例中,并参考图40A-图40B所示,部署系统3706可以被实现为一种或更多种虚拟仪器,以利用成像设备(例如,CT扫描仪,X射线机、MRI机器等)、测序设备、基因组设备和/或其他设备类型执行不同的功能,例如图像处理、分割、增强、AI、可视化和推理。在至少一个实施例中,系统3800可以允许创建和提供虚拟仪器,该虚拟仪器可以包括软件定义的部署管线3810,该软件定义的部署管线3810可以接收由一个或更多个设备生成的原始/未处理的输入数据并输出已处理的/重建的数据。在至少一个实施例中,表示虚拟仪器的部署管线3810(例如3810A和3810B)可以例如通过利用机器学习模型将智能实现到管线中,以向系统提供容器化的推理支持。在至少一个实施例中,虚拟仪器可以执行任何数量的容器,每个容器包括应用程序的实例。在至少一个实施例中,例如在需要实时处理的地方,表示虚拟仪器的部署管线3810可以是静态的(例如,可以设置容器和/或应用程序),而在其他示例中,用于虚拟仪器的容器和/或应用可以从应用程序或资源池中(例如,在容器注册表中)选择(例如,基于每个请求)。
在至少一个实施例中,系统3800可以被实例化或执行为在例如在与放射线机、成像设备和/或设施中的其他设备类型相邻或以其他方式与之通信的情况下的计算系统中的设施处本地部署的一个或多个虚拟仪器。然而,在至少一个实施例中,可以在本地数据中心(例如,本地部署数据中心)中和/或云环境(例如,云3826)中的设备本身的计算系统(例如,与成像设备集成的计算系统)内实例化或执行本地部署安装。在至少一个实施例中,在一些示例中,可以由超级计算机或其他HPC系统实例化作为虚拟仪器操作的部署系统3706。在至少一个实施例中,本地部署安装可以允许用于实时处理的高带宽用途(例如,通过更高吞吐量的本地通信接口,例如以太网上的RF)。在至少一个实施例中,在虚拟仪器支持超声设备或其他成像模态的情况下,实时或近实时处理可能特别有用,在该超声设备或其他成像模态中,期望或要求立即可视化以进行准确的诊断和分析。在至少一个实施例中,当本地需求超过本地部署容量或能力时,云计算架构可能能够动态爆发到云计算服务提供商或其他计算集群。在至少一个实施例中,如在此关于训练系统3704所描述的,云架构在被实施时可以被调整用于训练神经网络或其他机器学习模型。在至少一个实施例中,具有适当的训练管线,机器学习模型在处理其支持的设备中的其他数据时,可能会不断学习和改进。在至少一个实施例中,可以使用附加数据、新数据、现有机器学习模型和/或新的或更新的机器学习模型来持续改进虚拟仪器。
在至少一个实施例中,计算系统可以包括本文描述的硬件3722中的一些或全部,并且硬件3722可以以包括在设备内的多种方式中的任何一种来分布,作为耦合到设施中的本地数据中心内和/或云3826中的设备和位于该设备附近。在至少一个实施例中,因为部署系统3706和关联的应用程序或容器是在软件中创建的(例如,作为应用程序的分立容器化实例),虚拟仪器的行为、操作和配置以及虚拟仪器生成的输出可以根据需要进行修改或自定义,而无需改变或更改虚拟仪器支持的设备的原始输出。
图40A包括根据至少一个实施例的支持超声设备的虚拟仪器的示例数据流程图。在至少一个实施例中,部署管线3810B可以利用系统3800的服务3720中的一个或更多个。在至少一个实施例中,部署管线3810B和服务3720可以在本地或在云3826中利用系统的硬件3722。在一个实施例中,虽然未示出,但是过程4000可以由管线管理器3812、应用编排系统3828和/或并行计算平台3830来促进。
在至少一个实施例中,过程4000可以包括从超声设备4002接收成像数据。在至少一个实施例中,可以以DICOM格式(或其他格式,例如RIS、CIS、REST兼容、RPC、原始、等)存储在PACS服务器上,以及可以被系统3800接收,以供通过部署管线3810选择进行处理或定制为虚拟仪器(例如,虚拟超声)以用于超声设备4002。在至少一个实施例中,可以直接从成像设备(例如,超声设备4002)接收成像数据,并通过虚拟仪器对其进行处理。在至少一个实施例中,通信地耦合在成像设备和虚拟仪器之间的换能器或其他信号转换器可以将由成像设备生成的信号数据转换成可以由虚拟仪器处理的图像数据。在至少一个实施例中,原始数据和/或图像数据可以被应用于DICOM读取器3906,以提取数据以供部署管线3810B的应用程序或容器使用。在至少一个实施例中,DICOM读取器3906可以利用数据增强库4014(例如,NVIDIA的DALI)作为服务3720(例如,作为计算服务3816之一)来提取、调整大小、重新缩放和/或以其他方式准备数据以供应用程序或容器使用。
在至少一个实施例中,一旦准备好数据,就可以执行重建4006应用程序和/或容器以将来自超声设备4002的数据重建为图像文件。在至少一个实施例中,在重建4006之后或与重建4006同时,可以执行检测4008应用程序和/或容器以用于异常检测、对象检测、特征检测和/或与数据有关的其他检测任务。在至少一个实施例中,可以在检测4008期间使用在重建4006期间生成的图像文件来识别异常、对象、特征等。在至少一个实施例中,检测4008应用程序可以利用推理引擎4016(例如,作为AI服务3818之一),以对数据执行推理以生成检测。在至少一个实施例中,检测4008应用程序可以执行或调用一个或更多个机器学习模型(例如,来自训练系统3704)。
在至少一个实施例中,一旦重构4006和/或检测4008完成,从这些应用程序和/或容器输出的数据可用于生成可视化4010,例如显示在工作站或显示终端上的可视化4012(例如,灰度输出)。在至少一个实施例中,可视化可以允许技术人员或其他用户可视化相对于超声设备4002的部署管线3810B的结果。在至少一个实施例中,可以通过利用系统3800的渲染组件4018来执行可视化4010(例如,可视化服务3820之一)。在至少一个实施例中,渲染组件4018可以执行2D、OpenGL或光线追踪服务以生成可视化4012。
图40B包括根据至少一个实施例的支持CT扫描仪的虚拟仪器的示例数据流程图。在至少一个实施例中,部署管线3810C可利用系统3800的服务3720中的一个或更多个。在至少一个实施例中,部署管线3810C和服务3720可在本地或在云3826中利用系统的硬件3722。在至少一个实施例中,尽管未示出,但是过程4020可以由管线管理器3812、应用编排系统3828和/或并行计算平台3830来促进。
在至少一个实施例中,过程4020可以包括生成原始数据的CT扫描仪4022,该原始数据可以由DICOM读取器3906接收(例如,在处理等之后直接经由PACS服务器3904接收)。在至少一个实施例中,虚拟CT(由部署管线3810C实例化)可以包括第一实时管线,用于监视患者(例如,患者运动检测AI 4026)和/或用于调整或优化CT扫描仪4022的暴露。(例如,使用曝光控制AI 4024)。在至少一个实施例中,一个或更多个应用程序(例如4024和4026)可以利用服务3720,例如AI服务3818。在至少一个实施例中,曝光控制AI 4024应用程序(或容器)的输出和/或患者运动检测AI 4026应用程序(或容器)可以用作对CT扫描仪4022和/或技术人员的反馈,以调整曝光(或CT扫描仪4022的其他设置)和/或通知患者减少运动。
在至少一个实施例中,部署管线3810C可以包括用于分析由CT扫描仪4022生成的数据的非实时管线。在至少一个实施例中,第二管线可以包括CT重建3908应用程序和/或容器、粗略检测AI 4028应用程序和/或容器、精细检测AI 4032应用程序和/或容器(例如,通过粗略检测AI 4028检测到某些结果的情况)、可视化4030应用程序和/或容器以及DICOM编写器3912(和/或其他数据类型编写器,例如RIS、CIS、REST兼容、RPC、原始等)应用程序和/或容器。在至少一个实施例中,由CT扫描仪4022产生的原始数据可以通过部署管线3810C的管线(被实例化为虚拟CT仪器)以产生结果。在至少一个实施例中,来自DICOM写入器3912的结果可以被发送用于显示和/或可以被存储在PACS服务器3904上以供技术人员、从业者或其他用户以后检索、分析或显示。
图41A示出了根据至少一个实施例的用于训练、再训练或更新机器学习模型的过程4100的数据流程图。在至少一个实施例中,可以使用作为非限制性示例的图38的系统3800来执行过程4100。在至少一个实施例中,过程4100可以利用本文所描述的系统3800的服务3720和/或硬件3722。在至少一个实施例中,由过程4100生成的改进的模型4112可以由部署系统3706针对部署管线3810中的一个或更多个容器化应用程序执行。
在至少一个实施例中,模型训练3714可以包括使用新的训练数据(例如,新的输入数据,诸如客户数据集4106和/或与输入数据相关联的新的地面实况数据)对初始模型4104(例如,预训练模型)进行再训练或更新)。在至少一个实施例中,为了重新训练或更新初始模型4104,可以重置或删除初始模型4104的输出或损失层,和/或用更新的或新的输出或损失层代替。在至少一个实施例中,初始模型4104可以具有从先前训练中保留的先前精细调整的参数(例如权重和/或偏差),因此训练或再训练3714可能不需要花费与训练模型从头开始一样长的时间或不需要那么多的处理。。在至少一个实施例中,在模型训练3714期间,通过重置或替换初始模型4104的输出或损失层,可以基于与输出的准确性相关联的损失计算或生成关于新的客户数据集4106(例如,图37的图像数据3708)的预测时的损失层来为新数据集更新和重新调整参数。
在至少一个实施例中,可以将预训练的模型3806存储在数据存储或注册表中(例如,图37的模型注册表3724)。在至少一个实施例中,预训练模型3806可能已经至少部分地在除设施执行过程4100之外的一个或多个设施处训练。在至少一个实施例中,为了保护患者、受试者、或不同设施的客户,预训练的模型3806可能已经本地部署使用在本地部署生成的客户或患者数据进行了训练。在至少一个实施例中,可以使用云3826和/或其他硬件3722来训练预训练的模型3806,但是机密的、受隐私保护的患者数据可以不被传送到云3826的任何组件、不由云3826的任何组件使用或云3826的任何组件(其他非本地硬件)不可访问。在至少一个实施例中,在使用来自一个以上设施的患者数据来训练预训练模型3806的情况下,在对来自另一设施的患者或客户数据进行训练之前,可以针对每个设施分别对预训练模型3806进行训练。在至少一个实施例中,例如在客户或患者数据已发布隐私问题(例如,通过放弃、用于实验用途等),或客户或患者数据包含在公共数据集中的情况下,来自任何数量的设施的客户或患者数据可以用于在例如数据中心或其他云计算基础设施中的本地部署和/或备用设备情况下训练预先训练的模型3806。
在至少一个实施例中,当选择用于在部署管线3810中使用的应用程序时,用户还可以选择要用于特定应用程序的机器学习模型。在至少一个实施例中,用户可能不具有要模型以供使用,因此用户可以选择要与应用程序一起使用的预训练模型3806。在至少一个实施例中,对未优化预训练模型3806进行优化以在用户设施的客户数据集4106上生成准确结果(例如,基于患者多样性、人口统计学、所使用的医学成像设备的类型等)。在至少一个实施例中,在将预训练的模型3806部署到部署管线3810中以与一个或更多个应用程序一起使用之前,可以对预训练的模型3806进行更新、重新训练和/或微调以用于相应的设施。。
在至少一个实施例中,用户可以选择要被更新、重新训练和/或微调的预训练模型3806,并且预训练模型3806可以被称为用于处理4100中的训练系统3704的初始模型4104数据。在至少一个实施例中,客户数据集4106(例如,成像数据、基因组数据、测序数据或由设施中的设备生成的其他数据类型)可以用于在初始模型4104上执行模型训练3714(其可以包括,但不限于,转移学习)以生成细化模型4112。在至少一个实施例中,可以由训练系统3704生成对应于客户数据集4106的地面实况数据。在至少一个实施例中,可以至少部分地由临床医生、科学家、医生、从业人员在设施中生成地面实况数据。(例如,如图37中标记的临床数据3712)。
在至少一个实施例中,在一些示例中可以使用AI辅助注释3710来生成地面实况数据。在至少一个实施例中,AI辅助注释3710(例如,使用AI辅助注释SDK实现)可以利用机器学习模型(例如,神经网络)来生成针对客户数据集的建议或预测的地面实况数据。在至少一个实施例中,用户4110可以在计算设备4108上的用户界面(图形用户界面(GUI)内使用注释工具。
在至少一个实施例中,用户4110可以经由计算设备4108与GUI交互以编辑或微调注释或自动注释。在至少一个实施例中,多边形编辑特征可以用于将多边形的顶点移动到更精确或微调的位置。
在至少一个实施例中,一旦客户数据集4106具有相关联的地面实况数据,则地面实况数据(例如,来自AI辅助注释、手动标记等)可以在模型训练3714期间用于生成精炼模型4112。在至少一个实施例中,客户数据集4106可以被多次应用到初始模型4104,并且地面实况数据可以被用于更新初始模型4104的参数,直到对于细化模型4112达到可接受的精度水平。在至少一个实施例中,一旦生成了细化模型4112,就可以在用于执行关于医学成像数据的一个或更多个处理任务的设施处的一个或更多个部署管线3810内部署细化模型4112。
在至少一个实施例中,可以将细化模型4112上传到模型注册表3724中的预训练模型3806,以由另一设施选择。在至少一个实施例中,他的过程可以在任意数量的设施处完成,使得可以在新数据集上任意次数地进一步完善细化模型4112,以生成更通用的模型。
图41B是根据至少一个实施例的,利用预训练的注释模型来增强注释工具的客户端-服务器架构4132的示例说明。在至少一个实施例中,可以基于客户端-服务器架构4132来实例化AI辅助的注释工具4136。在至少一个实施例中,成像应用程序中的注释工具4136可以帮助放射线医生,例如,识别器官和异常。在至少一个实施例中,成像应用程序可以包括软件工具,作为非限制性示例,该软件工具帮助用户4110识别原始图像4134(例如,在3DMRI或CT扫描中)的特定感兴趣器官上的一些极端点,并接收特定器官的所有2D切片的自动注释结果。在至少一个实施例中,结果可以作为训练数据4138被存储在数据存储器中,并且被用作(例如但不限于)用于训练的地面实况数据。在至少一个实施例中,当计算设备4108发送用于AI辅助注释3710的极限点时,深度学习模型例如可以接收该数据作为输入并返回分割器官或异常的推断结果。在至少一个实施例中,预先实例化的注释工具(例如图41中的AI辅助注释工具4136B),可以通过对诸如注释辅助服务器4140之类的服务器进行API调用(例如,API调用4144)来增强,例如,注释辅助服务器4140可以包括存储在注释模型注册表中的一组预训练模型4142。在至少一个实施例中,注释模型注册表可以存储预训练的模型4142(例如,机器学习模型,诸如深度学习模型),其被预训练以对特定器官或异常执行AI辅助注释。在至少一个实施例中,可以通过使用训练管线3804来进一步更新这些模型。在至少一个实施例中,随着添加新的标记的临床数据3712,可以随时间改善预安装的注释工具。
推理和/或训练逻辑815用于执行与一个或更多个实施例相关联的推理和/或训练操作。在此结合图8A和/或图8B提供关于推理和/或训练逻辑815的细节。
可以根据以下条款描述本公开的至少一个实施例:
1.一种计算机实现的方法,包括:至少部分地基于来自第一感知系统的信息,将机器人移动到使用物理模型的第一方法控制的区域内;确定由所述第一感知系统产生的所述信息的不确定性;至少部分地基于所述不确定性来确定所述机器人在所述区域中;作为确定所述机器人在所述区域中的结果,在使用由第二感知系统产生的信息的第二方法的控制下移动该机器人以执行任务。
2.根据条款1所述的方法,其中所述第二方法不依赖于所述物理模型。
3.根据条款2所述的的方法,其中所述第二种方法是无模型方法。
4.根据条款1至3中任一项所述的方法,其中,所述第一方法是基于模型的方法。
5.根据条款1至4中的任一项所述的方法,其中:所述第一感知系统是固定相机;以及所述第二感知系统是安装在机器人上的相机。
6.根据条款1至5中任一项所述的方法,还包括至少部分基于所述信息的所述不确定性来确定所述区域。
7.根据条款1至6中的任一项所述的方法,还包括:确定所述机器人在所述区域之外;以及作为确定所述机器人在所述区域之外的结果,使用所述第一种方法将所述机器人移动到所述区域内。
8.根据条款1至7中的任一项所述的方法,其中,所述不确定性是所述区域的多个姿势以及每个姿势的相关联的权重的非参数分布。
9.根据条款1至8中的任一项所述的方法,其中,所述不确定性是参数分布。
10.根据条款1至9中任一项所述的方法,其中,所述区域是在其中所述第二方法可用于竞争任务的区域的子区域。
11.根据条款1至10中的任一项所述的方法,其中,使用自编码器来执行所述第二方法,所述自编码器被训练以完成来自所述第二感知系统的输入给定的任务。
12.一种计算机系统,包括:一个或更多个处理器;以及存储可执行指令的计算机可读存储器,所述可执行指令由于由一个或更多个处理器执行而使所述计算机系统:使用所述机器人环境的模型将机器人移动到某个区域,所述模型使用来自第一相机的图像数据进行定位;使用与所述第一相机相关联的不确定性信息来确定所述模型的不确定性;至少部分地基于所述模型的不确定性来确定所述机器人在所述区域中;以及作为确定所述机器人在所述区域中的结果,在使用来自第二个摄像机的图像数据训练的机器学习系统的控制下,使用机器人执行任务。
13.根据条款12所述的计算机系统,其中第二相机是机器人上的腕上相机。
14.根据条款12或13所述的计算机系统,其中,作为完成所述任务的结果,所述计算机系统使用所述任务的结果来更新所述模型的不确定性。
15.根据条款14所述的计算机系统,其中所述任务的结果指示所述模型的姿势。
16.根据条款12至15中的任一项的计算机系统,其中通过使用深物体姿态估计器至少处理来自所述第一相机的所述图像数据来定向所述模型。
17.根据条款12至16中的任一项所述的计算机系统,其中,所述第一相机和所述第二相机是不同的相机。
18.根据条款12至17中的任一项所述的计算机系统,其中来自所述第一相机的所述图像数据被用于生成与来自所述第一相机的所述图像数据一致的多个可能的姿势。
19.根据条款12至18中的任一项所述的计算机系统,其中,使用基于模型的控制器将所述机器人移动到所述区域,所述基于模型的控制器使用由所述机器人的运动策略定义的目标吸引子。
20.一种存储可执行指令的计算机可读介质,所述可执行指令由于在计算机系统的一个或更多个处理器上执行而导致所述计算机系统至少:在使用物理模型的基于模型的方法的控制下将机器人移动到区域内,该所述物理模型使用来自第一感知系统的信息进行定向;确定所述第一感知系统产生的信息的不确定性;至少部分基于所述不确定性,确定所述机器人在所述区域内;以及作为确定所述机器人在所述区域中的结果,基于第二感知系统产生的信息,在第二种方法的控制下,指导机器人执行任务。
21.根据条款20所述的计算机可读介质,其中:所述第一感知系统是固定相机;以及所述第二感知系统是与所述机器人一起移动的相机。
22.根据条款20或21所述的计算机可读介质,其中,至少部分地基于由所述第一感知系统产生的信息的不确定性来确定所述区域的尺寸。
23.根据条款20至22中的任一项所述的计算机可读介质,其中,由所述第一感知系统产生的信息的不确定性被确定为所述区域的多个姿势的分布。
24.根据条款20至23中的任一项的计算机可读介质,其中,可执行指令还使计算机系统:确定所述机器人在所述区域之外;以及作为确定所述机器人在所述区域之外的结果,使用所述基于模型的方法将所述机器人移动到所述区域内。
25.根据条款20至24中任一项所述的计算机可读介质,其中,所述第二方法是使用通过来自所述第二感知系统的输入训练的机器学习模型来实现的无模型方法。
26.根据条款25所述的计算机可读介质,其中,所述输入包括通过所述任务的模拟生成的模拟图像。
27.根据条款20至26中的任一项的计算机可读介质,其中,所述任务是控制自动驾驶车辆。
28.一种处理器,包括:一个或更多个算术逻辑单元(ALU),用以至少通过以下步骤来执行任务:使用机器人环境的模型将机器人移动到区域,所述模型使用来自第一相机的图像数据为进行定向;使用与所述第一相机相关联的不确定性信息来确定所述模型的不确定性;至少部分地基于所述模型的不确定性来确定所述机器人在所述区域中;以及作为确定机器人在所述区域中的结果,在使用来自第二个摄像机的图像数据训练的机器学习系统的控制下,使用所述机器人执行任务。
29.根据条款28所述的处理器,其中,所述第二相机提供要由所述机器人操纵的物体的手部视图。
30.根据条款28或29所述的处理器,其中,所述计算机系统使用所述任务的结果来降低所述模型的不确定性。
31.根据条款28至30中的任一项的处理器,其中,作为完成所述任务的结果而收集的信息用于获取所述模型的改善的姿势。
32.根据条款28至31中的任一项所述的处理器,其中,所述第一相机和所述第二相机是不同的相机。
33.根据条款28至32中的任一项的处理器,其中来自所述第一相机的图像数据用于生成与来自所述第一相机的图像数据一致的多个可能的姿势。
在至少一个实施例中,单个半导体平台可以指唯一的单一的基于半导体的集成电路或芯片。在至少一个实施例中,可以使用具有增加的连接性的多芯片模块,其模拟芯片上的操作,并且相对于利用传统的中央处理单元(“CPU”)和总线实施方式进行了实质性的改进。在至少一个实施例中,根据用户的需求,各种模块也可以分开放置或以半导体平台的各种组合放置。
在至少一个实施例中,返回参考图14,以机器可读的可执行代码或计算机控制逻辑算法的形式的计算机程序被存储在主存储器1404和/或辅助存储器中。如果由一个或多个处理器执行,则计算机程序使系统1400能够执行根据至少一个实施例的各种功能。在至少一个实施例中,存储器1404、存储器和/或任何其他存储器是计算机可读介质的可能示例。在至少一个实施例中,辅助存储器可以指代任何合适的存储设备或系统,例如硬盘驱动器和/或可移动存储驱动器,代表软盘驱动器、磁带驱动器、光盘驱动器、数字通用磁盘(“DVD”)驱动器、记录设备、通用串行总线(“USB”)闪存等。在至少一个实施例中,在CPU1402、并行处理系统1412、具有至少两个CPU 1402的能力的一部分的集成电路、并行处理系统1412、芯片组(例如,一组设计成工作并作为执行相关功能的单元出售的集成电路等)、和/或集成电路的任何适当组合的背景中实现了各种先前附图的架构和/或功能。
在至少一个实施例中,各种先前附图的架构和/或功能是在通用计算机系统、电路板系统、专用于娱乐目的的游戏控制台系统、专用系统等的背景下实现的。在至少一个实施例中,计算机系统1400可以采取台式计算机、膝上型计算机、平板计算机、服务器、超级计算机、智能电话(例如,无线、手持设备)、个人数字助理(“PDA”、数码相机、车辆、头戴式显示器、手持式电子设备、移动电话设备、电视、工作站、游戏机、嵌入式系统和/或任何其他类型的逻辑。
在至少一个实施例中,并行处理系统1412包括但不限于多个并行处理单元(“PPU”)1414和相关联的存储器1416。在至少一个实施例中,PPU 1414通过互连1418和开关1420或多路复用器连接到主机处理器或其他外围设备。在至少一个实施例中,并行处理系统1412在可并行化的PPU 1414上分布计算任务,例如,作为跨多个图形处理单元(“GPU”)线程块的计算任务分布的一部分。在至少一个实施例中,尽管在某些或所有PPU 1414之间共享和访问存储器(例如,用于读取和/或写入访问),但是这种共享存储器可能会引起相对于使用本地存储器和驻留在PPU1414上的寄存器的性能损失。在至少一个实施例中,通过使用诸如__syncthreads()之类的命令来同步PPU 1414的操作,其中块中的所有线程(例如,跨多个PPU 2114执行的)在到达某个代码执行点之后继续。
其他变型在本公开的精神内。因此,尽管所公开的技术易于进行各种变构和替代构造,但是某些示出的实施例由此在附图中示出并且已经在上面进行了详细描述。然而,应当理解,无意将本发明限制为所公开的特定形式或形式,相反,其意图是涵盖落入本发明的精神和范围内的所有修改、替代构造和等同形式,如所附权利要求所定义的。
在描述所公开的实施例的上下文中(特别是在所附权利要求的上下文中)术语“一”、“一个”和“所述”以及类似指代的使用应被解释为涵盖单数和复数并且不作为术语的定义,除非本文另有说明或与上下文明显矛盾。除非另外指出,否则术语“包括”、“具有”、“包含”和“含有”应解释为开放式术语(即,意思是“包括但不限于”)。术语“连接”(未经修改且指的是物理连接),应理解为完全或部分地包含在,附加到或连接在一起,即使有某物介入。本文中数值范围的引用仅旨在用作一种简写方法,除非本文另有说明,否则分别指代落入该范围内的每个单独值,并且每个单独值都被并入说明书中,就如同在此单独引用一样。在至少一个实施例中,术语“集合”(例如,“项目的集合)”或“子集”的使用,除非上下文另有说明或与之矛盾,否则应解释为包含一个或更多个成员的非空集合。此外,除非上下文另有说明或与之矛盾,否则相应集合的术语“子集”不是必需表示相应集合的适当子集,但是该子集和相应集合可以相等。
连接的语言,例如“A、B和C中的至少一个”或“A、B和C至少一个”形式的短语,除非另有明确说明或与上下文明显矛盾否则,否则可以作为通常使用与上下文一起理解以呈现项目、条款等,可以是是A或B或C,也可以是A和B以及C的集合的任何非空子集。例如,在具有三个成员的集合的示例性示例中,连接短语“A、B和C中的至少一个”和“A,B和C中的至少一个”是指以下任意集合:{A}、{B}、{C}、{A,B}、{A,C}、{B,C}、{A,B,C}。因此,这种连接语言通常并不旨在暗示某些实施例需要至少一个A、至少一个B和至少一个C,他们每一个用于呈现。另外,除非另有说明或与上下文矛盾,否则术语“多个”表示复数的状态(例如,“多个项目”表示复数个项目)。在至少一个实施例中,“多个”中项目的数量的至少是两个,但是当明确地或通过上下文指示时可以是更多。此外,除非另有说明或从上下文中另外可知,否则短语“基于”是指“至少部分基于”而不是“仅基于”。
可以以任何合适的顺序来执行本文描述的过程的操作,除非本文另有指示或与上下文明显矛盾。在一个实施例中,诸如本文描述的那些过程(或其变型和/或组合)的过程在一个或更多个计算机系统中的一个控制下通过硬件或其组合执行,一个或更多个计算机系统配置有可执行指令并且被实现为在一个或更多个处理器上共同执行的代码(例如,可执行指令、一个或更多个计算机程序或一个或更多个应用程序)。在一个实施例中,代码以计算机程序的形式存储在计算机可读存储介质上,该计算机程序包括可由一个或更多个处理器执行的多个指令的计算机程序。在一个实施例中,计算机可读存储介质是非暂时性计算机刻度存储介质,其不包括暂时信号(例如,传播的瞬态电或电磁传输)但包括瞬时信号的收发器内的非暂时性数据存储电路(例如,缓冲器、高速缓存和队列)。在一个实施例中,代码(例如,可执行代码或源代码)被存储在其上存储有可执行指令(或其他存储器以存储可执行指令)的一组一个或更多个非暂时性计算机可读存储介质上,该可执行指令在被计算机系统的一个或更多个处理器执行时(例如,作为被执行的结果),使计算机系统执行本文所述的操作。在一个实施例中,该组非暂时性计算机可读存储介质包括多个非暂时性计算机可读存储介质,以及多个非暂时性计算机可读存储介质中的一个或更多个单独的非暂时性存储介质缺少全部代码,而多个非暂时性计算机可读存储介质共同存储所有代码。在一个实施例中,可执行指令被执行,使得不同的指令被不同的处理器执行-例如,非暂时性计算机可读存储介质存储指令,并且主CPU执行一些指令,而图形处理器单元执行其他指令。在一个实施例中,计算机系统的不同组件具有独立处理器,以及不同处理器执行指令的不同子集。
因此,在一个实施例中,计算机系统配置成实现单独或共同执行本文所述的过程的操作的一个或更能多个服务,并且这样的计算机系统配置有能够使操作的执行的适用的硬件和/或软件。此外,实现本公开的实施例的计算机系统是单个设备,并且在另一实施例中,是一种分布式计算机系统,其包括以不同方式操作的多个设备,使得该分布式计算机系统执行本文所述的操作,并且使得单个设备不执行所有操作。
除非另外要求,本文提供的任何和所有示例或示例性语言(例如,“诸如”)的使用仅旨在更好地阐明本发明的实施例,而不对本发明的范围构成限制。本说明书中的语言不应解释为表示任何未要求保护的要素对于实施本发明是必不可少的。
本文引用的所有参考文献,包括出版物、专利申请和专利,均以引用的方式并入本文,其程度如同每个参考文献被单独且具体地指示以引用方式并入本文一样,并在此全文进行阐述。
在说明书和权利要求书中,可以使用术语“耦合”和“连接”及其派生词。应当理解,这些术语可能不旨在作为彼此的同义词。相反,在特定示例中,“连接”或“耦合”可用于指示两个或更多个元件彼此直接或间接物理或电接触。“耦合”也可能意味着两个或多个元素彼此不直接接触,但仍彼此协作或交互。
除非另有说明,否则应理解,在整个说明书中,诸如“处理”、“计算处理”、“计算”、“确定”等术语均指计算机或计算系统或类似的电子计算设备的动作和/或过程,这些电子设备将在计算系统的寄存器和/或存储器中表示为物理量(例如电子)的数据(例如电子)操作和/或转换为类似地表示为计算系统的存储器、寄存器或其他此类信息存储器、传输或显示设备中的物理量的其他数据。
在类似的方式中,术语“处理器”可以指处理来自寄存器和/或存储器的电子数据并将该电子数据转换成可以存储在寄存器和/或存储器中的其他电子数据的任何设备或设备的一部分。作为非限制性示例,“处理器”可以是中央处理单元(CPU)或图形处理单元(GPU)。“计算平台”可以包括一个或更多个处理器。如本文所使用的,“软件”过程可以包括例如随时间执行工作的软件和/或硬件实体,诸如任务、线程和智能代理。同样,每个过程可以指代多个过程,以依次或并行,连续或间歇地执行指令。在至少一个实施例中,术语“系统”和“方法”在本文中可互换使用,以达到一种该系统可以体现一种或更多种方法并且该方法可以被认为是系统的程度。
在本文档中,可以参考获得、获取、接收或将模拟或数字数据输入子系统、计算机系统或计算机实现的机器。在至少一个实施例中,可以以多种方式来完成获得、获取、接收或输入模拟和数字数据的过程,例如通过接收作为函数调用或对应用程序接口的调用的参数的数据。在一些实施方式中,获得、获取,接收或输入模拟或数字数据的过程可以通过经由串行或并行接口传输数据来完成。在另一个实施方式中,获得、获取、接收或输入模拟或数字数据的过程可以通过经由计算机网络将数据从提供实体转移到获取实体来完成。也可以参考提供、输出、传输、发送或呈现模拟或数字数据。在各种示例中,提供、输出、传输、发送或呈现模拟或数字数据的过程可以通过将数据作为函数调用的输入或输出参数、应用程序编程接口或进程间通信机制的参数进行传输来完成。
尽管以上讨论阐述了所描述的技术的示例实施方式,但是其他架构可以用于实现所描述的功能,并且意图在本公开的范围内。此外,尽管出于讨论目的在上面定义了具体的职责分配,但是根据情况,各种功能和职责可能以不同的方式分配和划分。
此外,尽管已经以结构特征和/或方法动作专用的语言描述了主题,但应理解,所附权利要求书中定义的主题不必限于所描述的特定特征或动作。而是,将特定特征和动作公开为实现权利要求的示例性形式。
- 引导不确定性-意识策略优化:结合无模型和基于模型的策略用于有效采样学习
- 一种基于模型的近端策略优化方法