纸模自动取放机构及机械手
文献发布时间:2023-06-19 11:05:16
【技术领域】
本发明涉及纸模生产设备技术领域,具体是一种纸模自动取放机构及机械手。
【背景技术】
随着科技的发展和人们环保意识的提高,纸质餐具或纸质保鲜托盘等纸制品受到了越来越多人的欢迎,因而也促进了纸制品生产行业向自动化智能化发展。在纸质餐具等纸模成型生产过程中,需要将初步成型的湿纸模从成型设备中取出并转移至烘干设备,等烘干结束后将干燥的干纸模从烘干设备中取出收集。现有技术中一般带有采用吸取装置的机械手,将承载有湿纸模的网框从初步成型设备移动至烘干设备,随后将载有干纸模的网框从烘干设备中取出,此种机械手自动化程度高,但是,采用吸取装置在吸取转移时受到横向或纵向载荷,存在掉落的风险,而且容易导致纸模变形,极大影响了纸模的质量和降低了纸模的生产效率,同时其能耗大、成本高,不利于现代化大规模生产。
【发明内容】
本发明的目的在于提供一种纸模自动取放机构及机械手,解决现有技术中通过吸取装置取放转移纸模时,纸模因受到横向或纵向载荷而导致容易掉落影响纸模的质量的问题。
为解决上述问题,本发明提供技术方案如下:
纸模自动取放机构,包括框架,所述框架上设有纵向进给装置,所述纵向进给装置上设有取放支架,所述纵向进给装置驱动所述取放支架沿纵向往复移动,所述取放支架上设有用于夹持承载有纸模的网框的纸模夹持装置。
如上所述的纸模自动取放机构,所述纸模夹持装置包括相对设置的第一夹持件和第二夹持件,所述第一夹持件和第二夹持件之间设有联动组件和驱动装置,所述驱动装置驱动联动组件带动第一夹持件和第二夹持件靠近或远离运动以夹紧或松开承载有纸模的网框。
如上所述的纸模自动取放机构,所述联动组件包括第一转轴和与第一转轴连接的第一连杆,以及第二转轴和与第二转轴连接的第二连杆,所述第一连杆和第二连杆之间设有连接第一连杆和第二连杆的摆动杆,以及与摆动杆连接的第三转轴,所述驱动装置与第三转轴连接,所述第一夹持件设于第一转轴上,所述第二夹持件设于第二转轴上,所述驱动装置驱动第三转轴转动以带动摆动杆摆动从而带动第一连杆和第二连杆摆动进而带动第一转轴和第二转轴转动以带动第一夹持件和第二夹持件靠近或远离运动。
如上所述的纸模自动取放机构,所述纸模夹持装置还包括相对设置的第三夹持件和第四夹持件,所述第三夹持件和第一夹持件之间设有第一联动杆,所述第一联动杆与第一转轴连接且可随第一转轴转动而摆动以带动第三夹持件和第一夹持件沿相反方向运动,所述第四夹持件和第二夹持件之间设有第二联动杆,所述第二联动杆与第二转轴连接且可随第二转轴转动而摆动以带动第四夹持件和第二夹持件沿相反方向运动。
如上所述的纸模自动取放机构,所述取放支架上设有沿第一夹持件和第二夹持件相对运动方向延伸的导向杆,所述第一夹持件和第三夹持件之间以及所述第二夹持件与第四夹持件之间均设有导向连接块,所述导向连接块与所述导向杆嵌套连接。
如上所述的纸模自动取放机构,所述第一夹持件、第二夹持件、第三夹持件和第四夹持件数量均为两个,两个所述第一夹持件与第三夹持件分别组合连接于第一转轴上,两个所述第二夹持件与第四夹持件分别组合连接于第二转轴上。
如上所述的纸模自动取放机构,所述纵向进给装置包括:
纵向导轨,其与框架固定连接;
纵向滑块,其滑动设于所述纵向导轨上,所述纵向滑块与取放支架固定连接;
动力装置,其与所述纵向滑块连接,用于带动所述纵向滑块沿纵向导轨滑动。
如上所述的纸模自动取放机构,所述动力装置包括第一同步组件,所述第一同步组件包括第一主动轮、第一从动轮、张紧在第一主动轮和第一从动轮上的第一同步带,所述第一主动轮上连接有纵向驱动电机。
如上所述的纸模自动取放机构,所述动力装置还包括与所述第一同步组件并列设置的第二同步组件,所述第二同步组件包括第二主动轮、第二同步轮、张紧在第二主动轮和第二从动轮上的第二同步带,所述第二主动轮与所述第一主动轮之间连接有同步杆。
机械手,包括如上所述的纸模自动取放机构,以及用于带动所述纸模自动取放机构竖向移动的竖向进给机构。
与现有技术相比,本发明有以下优点:
本发明提供的纸模自动取放机构及机械手,取放支架上设有纸模夹持装置,当需要转移纸模时,纵向进给装置驱动取放支架带动纸模夹持装置进入成型设备中,纸模夹持装置夹持着载有初步成型湿纸模的网框,随后在纵向进给装置的驱动下移出成型设备并转移至烘干设备,在放下载有初步成型湿纸模的网框后,纸模夹持装置夹持着载有已被烘干的干纸模的网框,在纵向进给装置的驱动下移出烘干设备,相比现有技术中的吸取装置,纸模夹持装置在移动过程能够稳定夹持,受到横向或纵向载荷的影响小,纸模掉落风险低,有利于保障纸模的生产质量,提高纸模的生产效率,同时相比现有技术中的吸取装置,其能耗小、成本低,有利于现代化大规模生产。
【附图说明】
图1为本发明实施例的结构示意图。
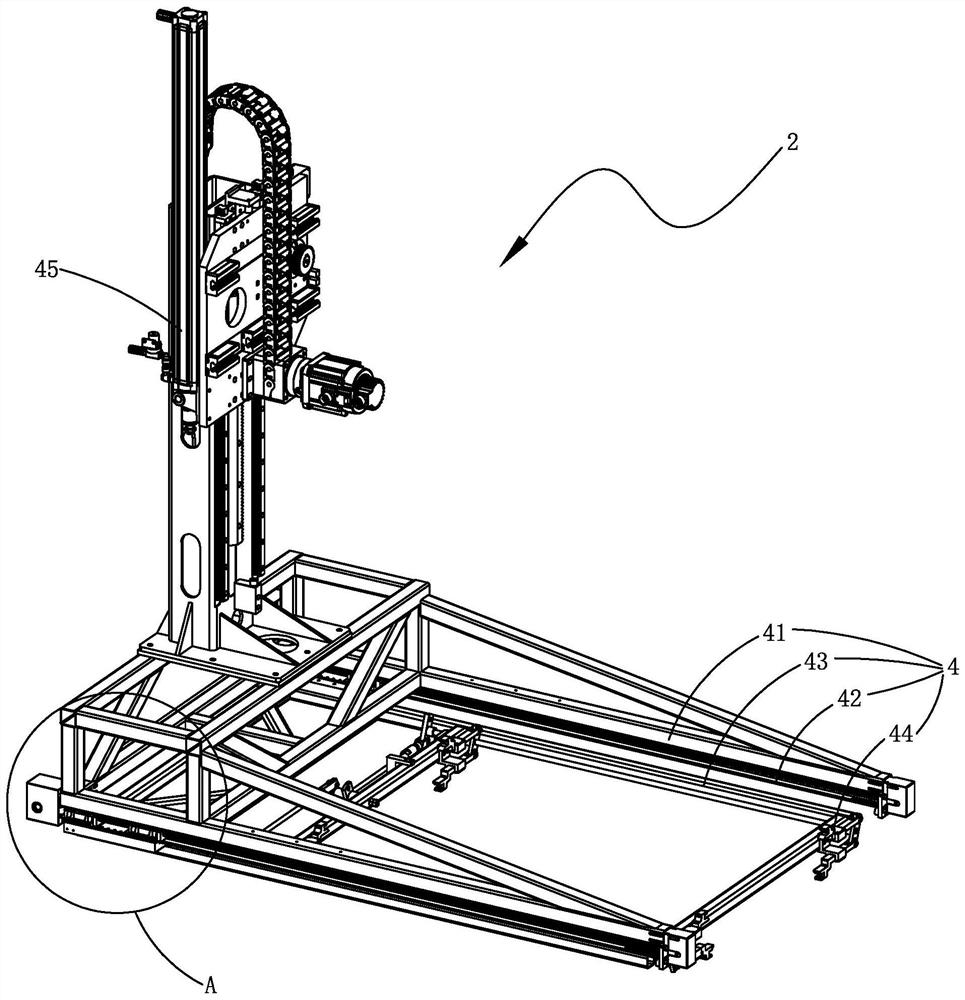
图2为本发明实施例的移送机械手的结构示意图。
图3为图2中A部放大图。
图4为本发明实施例的移送机械手的结构爆炸图。
图5为图4中B部放大图。
图6为本发明实施例的纸模自动取放机构部分结构示意图。
图7为本发明实施例的纸模夹持装置的结构示意图。
图8为图7中C部放大图。
图9为本发明实施例的堆码机械手的结构示意图。
图10为图9中D部放大图。
图11为本发明实施例的防护栏与机座连接的结构示意图。
【具体实施方式】
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明的保护范围。
请参阅附图1至附图11,本实施例提供一种纸模生产用智能机械手转移设备。
纸模生产用智能机械手转移设备,包括机座1,所述机座1上设有用于移送湿纸模和干纸模的移送机械手2,以及用于将移送机械手2移送来的干纸模进行堆码的堆码机械手3,所述移送机械手2可移动地设置于机座1上且所述移送机械手2上设有纸模自动取放机构4,所述纸模自动取放机构4包括框架41,所述框架41上设有纵向进给装置42,所述纵向进给装置42上设有取放支架43,所述纵向进给装置42驱动所述取放支架43沿纵向往复移动,所述取放支架43上设有用于夹持承载有纸模的网框的纸模夹持装置44。本实施例提供的纸模生产用智能机械手转移设备,设有移送机械手2和堆码机械手3,移送机械手2中的纸模自动取放机构4设有可沿纵向往复运动的取放支架43,取放支架上43设有纸模夹持装置44,当需要转移纸模时,纵向进给装置42驱动取放支架43带动纸模夹持装置44进入成型设备中,纸模夹持装置44夹持着载有初步成型湿纸模的网框,随后在纵向进给装置42的驱动下移出成型设备并转移至烘干设备,在放下载有初步成型湿纸模的网框后,纸模夹持装置44夹持着载有已被烘干的干纸模的网框,在纵向进给装置42的驱动下移出烘干设备,随后移动至堆码机械手3下方,由堆码机械手3对干纸模进行堆码,其自动化程度高,而且相比现有技术中的吸取装置,纸模夹持装置44在移动过程能够稳定夹持,受到横向或纵向载荷的影响小,纸模掉落风险低,有利于保障纸模的生产质量,提高纸模的生产效率,同时相比现有技术中的吸取装置,其能耗小、成本低,有利于现代化大规模生产。
其中,移送机械手2还包括用于带动所述纸模自动取放机构4竖向移动的竖向进给机构45,通过竖向进给机构45调整自动取放机构4的高度,使纸模自动取放机构4能适用于不同高度的移送取放,实用性强,适用范围广。
具体地,所述纸模夹持装置44包括相对设置的第一夹持件441和第二夹持件442,所述第一夹持件441和第二夹持件442之间设有联动组件443和驱动装置444,所述驱动装置444驱动联动组件443带动第一夹持件441和第二夹持件442靠近或远离运动以夹紧或松开承载有纸模的网框。本实施例中,驱动装置444为气缸,在取放纸模时,第一夹持件441和第二夹持件442在驱动装置444与联动组件443的作用下夹持载有纸模的网框,第一夹持件441和第二夹持件442受力均匀,使夹持更加平稳,有效避免纸模在移动过程中掉落,有利于提高生产效率。
具体地,所述联动组件443包括第一转轴4431和与第一转轴4431连接的第一连杆4432,以及第二转轴4433和与第二转轴4433连接的第二连杆4434,所述第一连杆4432和第二连杆4434之间设有连接第一连杆4432和第二连杆4434的摆动杆4435,以及与摆动杆4435连接的第三转轴4436,所述驱动装置444与第三转轴4436连接,所述第一夹持件441设于第一转轴4431上,所述第二夹持件442设于第二转轴4433上,所述驱动装置444驱动第三转轴4436转动以带动摆动杆4435摆动从而带动第一连杆4432和第二连杆4434摆动进而带动第一转轴4431和第二转轴4433转动以带动第一夹持件441和第二夹持件442靠近或远离运动。驱动装置444仅需驱动第三转轴4436转动,即可带动第一夹持件441和第二夹持件442夹紧或者松开,结构简单,联动效果好,夹持也更加稳固。
进一步地,所述纸模夹持装置44还包括相对设置的第三夹持件445和第四夹持件446,所述第三夹持件445和第一夹持件441之间设有第一联动杆447,所述第一联动杆447与第一转轴4431连接且可随第一转轴4431转动而摆动以带动第三夹持件445和第一夹持件441沿相反方向运动,所述第四夹持件446和第二夹持件442之间设有第二联动杆448,所述第二联动杆448与第二转轴4433连接且可随第二转轴4433转动而摆动以带动第四夹持件446和第二夹持件442沿相反方向运动。当第一转轴4431和第二转轴4433转动而带动第一夹持件441和第二夹持件442相对靠近夹紧时,第三夹持件445与第四夹持件446相对远离松开。第一夹持件441和第二夹持件442设于同一高度,第三夹持件445与第四夹持件446设于同一高度,进行取放时,第一夹持件441和第二夹持件442以及第三夹持件445和第四夹持件446轮番相对运动,在第一夹件441和第二夹持件442松开放下载有初步成型湿纸模的网框后,第三夹持件445和第四夹持件446夹紧载有干纸模的网框,纸模夹持装置44无需移动位置即可完成取放动作,能满足不同位置的取放需求,使用起来更加便捷。
进一步地,所述取放支架43上设有沿第一夹持件441和第二夹持件442相对运动方向延伸的导向杆431,所述第一夹持件441和第三夹持件445之间以及所述第二夹持件442与第四夹持件446之间均设有导向连接块449,所述导向连接块449与所述导向杆431嵌套连接。导向连接块449上设有供导向杆431嵌入的凹槽,当第一夹持件441和第二夹持件442相对运动时,由于导向连接块449与导向杆431的导向作用,促使第一夹持件441和第二夹持件442移动更加平稳,有利于快速定位夹持。
进一步地,所述第一夹持件441、第二夹持件442、第三夹持件445和第四夹持件446数量均为两个,两个所述第一夹持件441与第三夹持件445分别组合连接于第一转轴4431上,两个所述第二夹持件442与第四夹持件446分别组合连接于第二转轴4433上。通过两组夹持件共同配合,分别夹持载有纸模的网框的四个对位安装部,使纸模在移动过程中更加平稳,有利于降低纸模掉落的风险。
具体地,所述纵向进给装置42包括:
纵向导轨421,其与框架41固定连接;
纵向滑块422,其滑动设于所述纵向导轨421上,所述纵向滑块422与取放支架43固定连接;
动力装置423,其与所述纵向滑块422连接,用于带动所述纵向滑块422沿纵向导轨421滑动。
动力装置423驱动纵向滑块422沿与框架41固定连接的纵向导轨421滑动,从而带动与纵向滑块422固定连接的取放支架43沿纵向移动,无需人工操作,自动化程度高。
具体地,所述动力装置423包括第一同步组件4231,所述第一同步组件4231包括第一主动轮、第一从动轮、张紧在第一主动轮和第一从动轮上的第一同步带,所述第一主动轮上连接有纵向驱动电机4232。通过纵向驱动电机4232带动第一主动轮转动,从而带动第一同步带移动,进而带动与第一同步带连接的纵向滑块422及取放支架43移动,其结构简单,传送效果好。
进一步地,所述动力装置423还包括与所述第一同步组件4231并列设置的第二同步组件4233,所述第二同步组件4233包括第二主动轮、第二同步轮、张紧在第二主动轮和第二从动轮上的第二同步带,所述第二主动轮与所述第一主动轮之间连接有同步杆4234。第一同步组件4231与第二同步组件4233并排设置,通过同步杆4234带动同步运转,在驱动取放支架43纵向移动时更加平稳顺畅,使移送更加稳定,移送效率更高。
具体地,所述堆码机械手3包括用于吸取干纸模的吸盘组件31和用于带动所述吸盘组件31竖向往复运动的竖向驱动组件32。当移送机械手2将干纸模移送至堆码机械手3下方时,堆码机械手3中的吸盘组件31吸紧载有干纸模的网框,移送机械手2从堆码机械手3下方移动至其他区域时,堆码机械手3中的竖向驱动组件32带动吸盘组件31竖向移动进行堆码,自动化完成堆码操作,无需人工堆码,有利于促进纸模生产自动化。
具体地,所述竖向驱动组件32包括与所述吸盘组件31固定连接的竖向导轨321和滑动设于竖向导轨321上且与机座1固定连接的竖向滑块322,所述竖向滑块322上设有竖向驱动电机323,所述竖向驱动电机323的输出端设有齿轮324,所述吸盘组件31上设有沿竖向延伸且与齿轮324啮合的齿条325。通过竖向驱动电机323带动齿轮324与齿条325啮合,从而带动竖向滑块322相对竖向导轨321滑动,进而带动吸盘组件31相对机座1竖向移动,其结构简单,驱动效果好。
进一步地,所述机座1包括横梁11和设于横梁11两端的立柱12,所述立柱12一侧设有电箱5,所述立柱12与横梁11及电箱5连通。在接线时,可通过立柱12与横梁11内部走线并与电箱5连通,使走线更加规整和便捷。
进一步地,还包括用于防护作业安全的防护栏6,所述防护栏6围设于所述机座1远离纸模自动取放机构4进给运动方向一侧。本实施例中,所述防护栏6包括分别与机座1铰接且可相对机座1翻转的第一护栏61和第二护栏62,所述第一护栏61上滑动连接有第三护栏63,所述第二护栏62上滑动连接有可与第三护栏63靠近或远离运动的第四护栏64。如图11所示,在平时使用时,可以通过移动第三护栏63和第四护栏64以打开或关闭防护栏6;也可以通过翻转第一护栏61和第二护栏62以打开或关闭护栏6,第一护栏61和第二护栏62均设有滑轮,当打开时第一护栏61时带动第三护栏63翻转,打开第二护栏62时带动第四护栏64翻转,便于形成较大的开口以满足设备维护等需求。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 带有齿条侧向力消除机构的升降臂及纸模自动取放机械手
- 导向进给机构及纸模自动取放机械手