一种流体柔性机械手及其组件
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及机械手领域,具体来说,涉及一种流体柔性机械手及其组件。
背景技术
目前市场上面的机械手通常为刚性机械手,其具有重量大、承载低、动作为直线运动,如电驱动机械手,一般为电机带动刚性支臂运动,通过组合实现各种空间动作,通常自身重量为抓取物的几倍以上,这就造成抓取物越重其自身相应倍数级增加,同时驱动电机功率越大,耗能相应倍数增大。
针对相关技术中的问题,目前尚未提出有效的解决方案。
发明内容
针对相关技术中的上述技术问题,本发明提出一种流体柔性机械手及其组件,可以解决上述问题。
本发明参照蛇与动物尾巴的形态机理,利用可变形的柔性组件实现肌肉的收缩变化,采用刚性材料作为骨架,利用流体作为动力如增压后的气体或液体。
柔性组件为中空的球形、管状或整根葫芦状管,均是利用其可变形的机理,内部充入加压后的流体,使其变形进而推动刚性骨架,实现各种运动。
为实现上述技术目的,本发明的技术方案是这样实现的:
一种流体柔性机械手,包括至少两个支撑隔板,相邻的两个所述支撑隔板通过连接件连接,相邻两个所述支撑隔板之间设置有第一膨胀组件,所述第一膨胀组件用于挤压所述支撑隔板并使所述支撑隔板绕所述连接件发生偏转,所述第一膨胀组件上设置有加压管。
进一步的,所述第一膨胀组件位于所述支撑隔板的中部,所述连接件位于所述支撑隔板的端部。
进一步的,所述连接件位于所述支撑隔板的中部,所述第一膨胀组件为多列,多列所述第一膨胀组件环绕所述连接件均匀分布。
进一步的,所述连接件位于所述支撑隔板的中部,所述第一膨胀组件为两列,两列所述第一膨胀组件位于所述连接件的两侧。
进一步的,所述连接件位于所述支撑隔板的中部,所述第一膨胀组件为四列,四列所述第一膨胀组件环绕所述连接件均匀分布。
进一步的,所述连接件为第二膨胀组件,所述第二膨胀组件位于所述支撑隔板的中部,所述第一膨胀组件为多列,多列所述第一膨胀组件环绕所述第二膨胀组件均匀分布;所述第一膨胀组件加压沿所述支撑隔板排布方向伸长,所述第二膨胀组件加压沿所述支撑隔板排布方向收缩。
进一步的,所述第二膨胀组件位于所述支撑隔板的中部,所述第一膨胀组件为四列,四列所述第一膨胀组件环绕所述第二膨胀组件均匀分布。
进一步的,所述连接件与所述支撑隔板固定连接,所述连接件为铰链、链条、万向节、软轴中的一种。
进一步的,所述连接件与所述支撑隔板铰接。
一种流体柔性机械手组件,包括多个组合在一起的如上述任一项所述的流体柔性机械手。
其中第一膨胀组件和第二膨胀组件根据使用压力不同采用不同的方式,当使用压力低于1Mpa时,可采用增强橡胶、高分子聚合物或其它弹性体材料制作而成,如TPU、TPE、PVC、TPR、SBS等。当压力大于1Mpa在外面复合上编织纤维,根据压力的不同可选择不同的纤维丝编织,如:尼龙纤维、锦纶纤维、芳纶纤维、玻纤、碳纤、PBO纤维、高分子聚乙烯纤维等。也可采用多层编织方式。其变粗变长的应用可采用扁形膨胀组件或葫芦型,或者预压缩膨胀组件的方式实现。而变粗变短的可采用外套交叉编织层,利用纤维空间变化时,总表面积不变的理论,实现变粗变短的功能。
骨架采用连接件、支架、支撑隔板组合而成,可以由复合材料或金属材料加工而成。第一膨胀组件使支撑隔板发生偏转运动,可以通过多种途径实现,一种是连接件本身可弯曲使支撑隔板发生偏转,连接件可以是铰链、链条、万向节、软轴等实现设定方向运动的功能,二种是连接件本身与支撑隔板铰接。连接件还可以是同时具有伸缩和弯折功能的部件。支撑隔板之间可以设置弹簧以提供第一膨胀组件泄压后流体柔性机械手恢复原状的作用力。
通过组合可以实现单边、双边、多排、抓手型等多种方式的流体柔性机械手组合,以应对不同的需求。如单边单排、单边多排、万向型、抓手型等多种组件形式。
通过组件级联可实现多组件使用,如顺行级联、交叉级联或者交叉组合级联等形式,以应对不同的需求。
本发明的有益效果:本发明解决刚性机械手的诸多缺陷,采用可弯曲的柔性结构实现位移动作,采用流体作为驱动力。具有重量轻、载荷大、可直接实现曲线运动,进而实现类似蛇形的动作。可抓取大于自身重量几倍甚至几十倍的物体。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
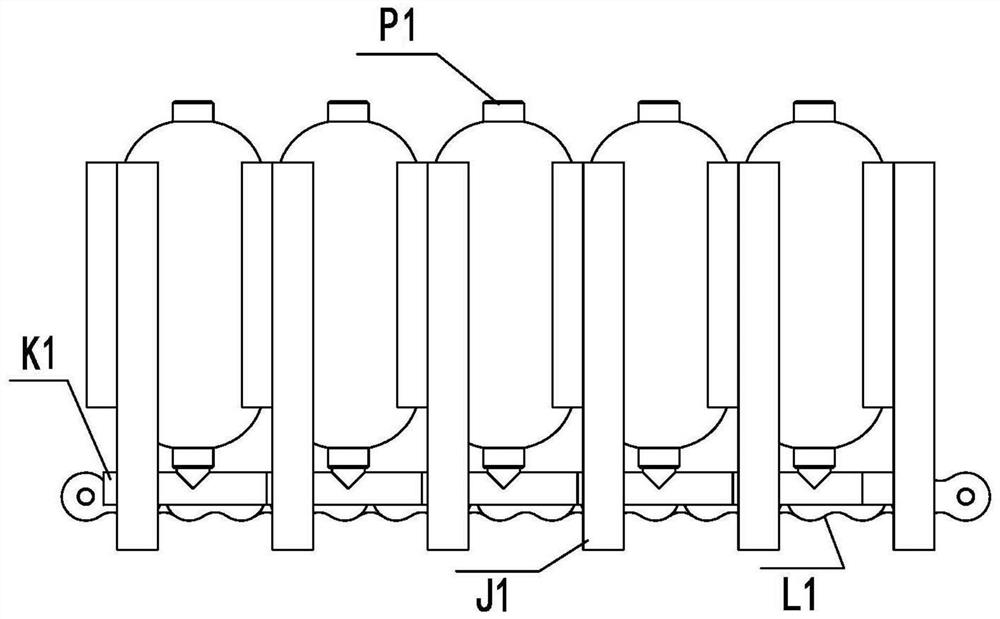
图1是第一种单边单排流体柔性机械手的正视图;
图2是第一种单边单排流体柔性机械手的立体图;
图3是第二种单边单排流体柔性机械手的正视图;
图4是第二种单边单排流体柔性机械手的立体图;
图5是第一种单边多排流体柔性机械手的俯视图;
图6是第一种单边多排流体柔性机械手的立体图;
图7是第一种双边单排流体柔性机械手的俯视图;
图8是第一种双边单排流体柔性机械手的立体图;
图9是实施例四中球形膨胀组件的第一示意图;
图10是实施例四中球形膨胀组件的第二示意图;
图11是实施例四中球形膨胀组件的第三示意图;
图12是第二种双边单排流体柔性机械手的俯视图;
图13是第二种双边单排流体柔性机械手的立体图;
图14是实施例五中串型膨胀组件的第一示意图;
图15是实施例五中串型膨胀组件的第二示意图;
图16是实施例五中串型膨胀组件的第三示意图;
图17是万向型流体柔性机械手的俯视图;
图18是万向型流体柔性机械手的立体图;
图19是收缩万向型流体柔性机械手的俯视图;
图20是收缩万向型流体柔性机械手的立体图;
图21是收缩万向型流体柔性机械手的立体图;
图22是抓手型流体柔性机械手的立体图;
图23是抓手型流体柔性机械手的立体图;
图24是串接组合型流体柔性机械手的立体图;
图25是串接组合型流体柔性机械手的立体图。
图中:J1.支架,L1.铰链,Z1.支撑隔板,Z2.两瓣型支撑隔板,Z3.支撑架,P1.膨胀组件,P2.串型膨胀组件,P4.管型膨胀组件,K1.进液管,G1.收缩万向型骨架。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
实施例一,如图1-2所示,单边方式:支架J1、铰链L1、支撑隔板Z1组合成柔性机械手的骨架,球形膨胀组件P1安装在支撑隔板Z1中间。其中球形膨胀组件P1可为扁圆型,也可为球形,压扁后安装在支撑隔板Z1中间,排列成一排。通过进液管K1连接起来。当加压后的流体通过进液管K1进入其中一排球形膨胀组件P1内部,受压后的球形膨胀组件P1膨胀变大,推动支撑隔板Z1使其间距变大,由于铰链L1可弯曲不可拉伸变长的作用,致使整体形成弯曲动作。
实施例二,如图3-4所示,单边方式:支架J1、铰链L1、支撑隔板Z2组合成柔性机械手的骨架,串型膨胀组件P2安装在两瓣型支撑隔板Z2中间。其中串型膨胀组件P2为葫芦状,或由若干个球形串接组合而成,安装在两瓣型支撑隔板Z2中间,排列成一排。通过进液管K1连接起来。
实施例三,如图5-6所示,在实施例一或二的基础上实现单边多排形式:
单边形式可以是单排或多排,其动作为单向弯曲,如图5所示为初始状态,图6为弯曲动作状态示意图,示例只是为了能够表达与理解,可根据需求可采用球形方式,或单排、多排等组合方式。
实施例四,如图7-8所示,双边组合形式,在实施例一的基础上,将实施例一的单边单排流体柔性机械手进行镜像组合,支架J1、铰链L1、支撑隔板Z1组合成柔性机械手的骨架,球形膨胀组件P1安装在支撑隔板Z1中间。其中球形膨胀组件P1可为扁圆型,也可为球形,压扁后安装在支撑隔板Z1中间,排列成两排。通过管理将两排分别串接起来与进液口K1连接,实现压力流体送入或排出。
当加压后的流体通过进液管K1进入其中一排球形膨胀组件P1内部,受压后的球形膨胀组件P1膨胀变大,推动支撑隔板Z1使其间距变大,由于铰链L1的支点作用,使支撑隔板Z1得另一边形成间距变小的动作,进而压缩另一排球形膨胀组件P1,使其内部的流体通过进液管K1排出。以此形成弯曲动作。
反向运行此流程,即可实现另一个反方向的弯曲动作。
膨胀组件P1的变形原理:
球形膨胀组件P1安装初始状态为扁形,如图9所示。当一侧内部充入压力流体后,向外膨胀变大变宽,向支撑隔板Z1输出推力,支撑隔板Z1延铰链L1可弯曲方向运动,球形膨胀组件P1逐渐形成图10状态,而另一侧正好相反,如图11所示。
实施例五,如图12-13所示,双边组合形式,支架J1、铰链L1、两瓣型支撑隔板Z2组合成柔性机械手的骨架,串型膨胀组件P2安装在两瓣型支撑隔板Z2中间。其中串型膨胀组件P2为葫芦状,或由若干个球形串接组合而成,安装在两瓣型支撑隔板Z2中间,排列成两排。通过进液口K1将压力流体送入或排出。
当加压后的流体通过进液管K1进入其中一边的串型膨胀组件P2内部,受压后的串型膨胀组件P2膨胀变大,推动两瓣型支撑隔板Z2使其间距变大,由于铰链L1的支点作用,使两瓣型支撑隔板Z2的另一边形成间距变小的动作,进而压缩另一排串型膨胀组件P2,使其内部的流体通过进液管K1排出。以此形成弯曲动作。
反向运行此流程,即可实现另一个反方向的弯曲动作。
串型膨胀组件P2变形原理:
串型膨胀组件P2安装初始状态为一根亚葫芦形状可变形组件,如图14所示。当一侧内部充入压力流体后,向外膨胀变大变长,向两瓣型支撑隔板Z2输出推力,两瓣型支撑隔板Z2延铰链L1可弯曲方向运动,串型膨胀组件P2逐渐形成图15状态,而另一侧正好相反,如图16所示。
实施例六,如图17-18所示,万向型组合形式,通过组合可以实现任意方向的动作,如采用三排以上组合,通过控制不同串型膨胀组件P2从而实现不同方向的运动。本示例为4排组合方式,支撑架Z3、铰链L1组合成柔性机械手的骨架,其中铰链L1采用万向节的结构形式以实现任意方向的弯曲。其中串型膨胀组件P2为葫芦状,或由若干个球形串接组合而成,安装在支撑架Z3上面,在铰链L1外围排列成四排。通过进液管K1将压力流体送入、保持或排出。
实施例七,如图19-21所示,收缩万向型组合形式,通过采用不同变化形式的膨胀组件,可组合成具有弯曲变化的同时,增加伸缩的变化量,具体实施案例如图19图20所示,外部采用充入压力流体变大变长的串型膨胀组件P2,中间采用充入压力流体变粗变短的外套交叉编织纤维套得内囊作为管型膨胀组件P4。同时管型膨胀组件P4在其对应的进液管K1的控制闭合时具有的保持作用,可实现万向节的作用。串型膨胀组件P2,管型膨胀组件P4安装在收缩万向型骨架G1上面,通过进液管K1充入压力流体,实现各种动作。
通过采用不同的控制,可实现不同方向的运动,以及伸缩的变化量。为了清除的描述动作原理,图中将进液管K1按照排列分为进液管上K1-上,进液管上K1-下,进液管上K1-左,进液管上K1-右,进液管上K1-中,其中进液管上K1-上,进液管上K1-下,进液管上K1-左,进液管上K1-右分别为外围的4根串型膨胀组件P2进液管,进液管上K1-中为管型膨胀组件P4的进液管。为了减少文字以下简称进液管上、进液管下、进液管左、进液管右、进液管中。具体动作如图21所示:
伸长动作:进液管中为敞开排空,进液管上、进液管下、进液管左、进液管右同时充入压力流体时,流体机械手实现伸长动作。
缩短动作:当进液管上、进液管下、进液管左、进液管右为敞开排空,进液管中充入压力流体为缩短动作。
弯曲动作:当进液管中为关闭为保持状态时,通过控制进液管上、进液管下、进液管左、进液管右的不同组合可实现各种弯曲动作。
实施例八,如图22-23所示,抓手型,通过组合可以组装实现抓手的动作,从而实现抓取、抱取的功能,如图22所示,示例为串型单边组合形式,每边两排,当充入压力流体后组件向内弯曲动作,实现抓取、抱取物体的功能。如图23所示。根据需求可采用球形方式、多排组合方式等。
实施例九,如图24-25所示,串接组合型,通过串接可以实现多种方位、多种动作的运行。图24为球形串接组合示意图,图25为串型串接组合示意图。
上述描述为两组交叉级联,可根据需求通过组件级联可实现多组件使用,如顺行级联、多组交叉级联或者交叉组合级联等形式。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种流体柔性机械手及其组件
- 一种含非牛顿流体的柔性机械手