一种用于植物看护及培育机器人
文献发布时间:2023-06-19 11:06:50
技术领域
本发明属于机器人技术领域,具体涉及一种用于植物看护及培育机器人。
背景技术
机器人(Robot)是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作。随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器,如移动机器人、微机器人、水下机器人、医疗机器人、军用机器人、空中空间机器人、娱乐机器人等。对不同任务和特殊环境的适应性,也是机器人与一般自动化装备的重要区别。这些机器人从外观上已远远脱离了最初仿人型机器人和工业机器人所具有的形状,更加符合各种不同应用领域的特殊要求,其功能和智能程度也大大增强,从而为机器人技术开辟出更加广阔的发展空间。
与现有技术相比较存在的问题:
现在机器人涉及到种种行业,对于养殖人不能时刻对植物养殖看护,养殖人过于忙碌,且不能及时进行浇水,且对于植物的落叶不能及时清扫。
发明内容
为解决上述背景技术中提出的问题。本发明提供了一种用于植物看护及培育机器人,具有自动监控看护植物、自动浇水清扫落叶使用简单方便的特点。
为实现上述目的,本发明提供如下技术方案:一种用于植物看护及培育机器人,包括机器主控仓,所述机器主控仓的下侧安设有驱动电机,所述驱动电机的底端中部安设有自动吸尘模块,所述自动吸尘模块的外侧及驱动电机的底端安设有万向轮,所述机器主控仓的顶端安设有旋转轴,所述旋转轴的上侧安设有机器人头部,所述机器人头部前侧镶嵌有显示屏,所述显示屏的上侧安设摄像模块,所述机器主控仓的内部安设有储水箱,所述机器主控仓的外侧及储水箱的一侧连接安设有供水口,所述储水箱通过管道连接喷洒头,所述储水箱的一侧安设有主控模块。
优选的,所述主控模块包括PLC、CPU、无线传输模块、存储器、警报模块、语音播报模块、定时器。
优选的,所述驱动电机的一侧安设有防碰撞传感器,且连接万向轮、主控模块,所述的一外侧安设有自动充电口;通过驱动电机驱动万向轮行走时,防止撞到植物等,当没电时,控制模块控制机器人自动充电。
优选的,所述自动吸尘模块的内部安设有粉碎结构、称量装置,且连接主控模块;当地上有叶片或者垃圾均可吸入,通过粉碎结构将其搅碎,增大垃圾存放面积,且通过内部的称量装置称量垃圾较重时,通过无线传输模块,传到客户端,提示清理内部垃圾,使用非常简单方便。
优选的,所述喷洒头的形状为圆盘状,其前侧开设有若干个密孔,且后侧安设有中空旋转平台,储水箱与喷洒头的之间的连接管上安设有自控阀,且连接主控模块;根据不同花植物的灌溉情况,设置浇灌的阈值时间,且根据阈值时间进行定时植物的浇灌,省时省力。
优选的,所述摄像模块、显示屏、主控模块电性连接;通过摄像模块实时对周围的监控,当有人靠近植物,将拍照传到客户端,发出语音进行播报,提示养殖者,防止花卉被偷,定时拍摄花卉图片,通过无线传输模块传到客户端,可让养殖者欣赏、监控,在显示屏上显示拍摄的花卉的图片。
与现有技术相比,本发明的有益效果是:当地上有叶片或者垃圾均可吸入,通过粉碎结构将其搅碎,增大垃圾存放面积,且通过内部的称量装置称量垃圾较重时,通过无线传输模块,传到客户端,提示清理内部垃圾,使用非常简单方便,根据不同花植物的灌溉情况,设置浇灌的阈值时间,且根据阈值时间进行定时植物的浇灌,省时省力,通过摄像模块实时对周围的监控,当有人靠近植物,将拍照传到客户端,发出语音进行播报,提示养殖者,防止花卉被偷,定时拍摄花卉图片,通过无线传输模块传到客户端,可让养殖者欣赏、监控,在显示屏上显示拍摄的花卉的图片。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
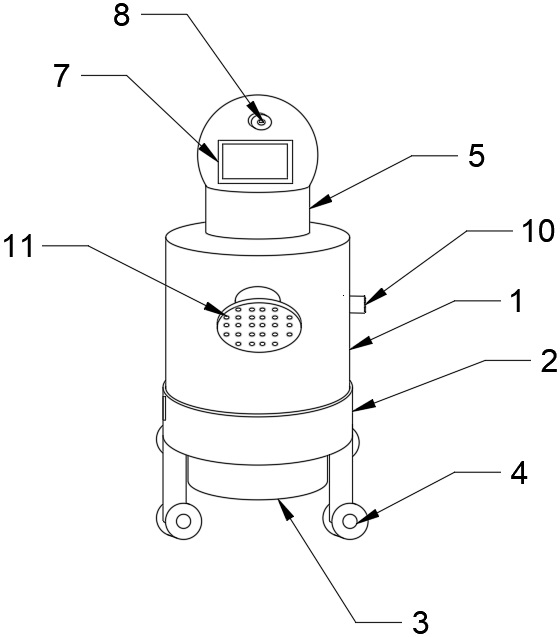
图1为本发明的结构示意图。
图2为本发明的透视结构示意图。
图中:1、机器主控仓;2、驱动电机;3、自动吸尘模块;4、万向轮;5、旋转轴;6、自动充电口;7、显示屏;8、摄像模块;9、储水箱;10、供水口;11、喷洒头;12、主控模块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-图2,本发明提供以下技术方案:一种用于植物看护及培育机器人,包括机器主控仓1,机器主控仓1的下侧安设有驱动电机2,驱动电机2的底端中部安设有自动吸尘模块3,自动吸尘模块3的外侧及驱动电机2的底端安设有万向轮4,机器主控仓1的顶端安设有旋转轴5,旋转轴5的上侧安设有机器人头部,机器人头部前侧镶嵌有显示屏7,显示屏7的上侧安设摄像模块8,机器主控仓1的内部安设有储水箱9,机器主控仓1的外侧及储水箱9的一侧连接安设有供水口10,储水箱9通过管道连接喷洒头11,储水箱9的一侧安设有主控模块12。
本实施例中:PLC的型号为SIMATIC S7-400。
具体的,主控模块12包括PLC、CPU、无线传输模块、存储器、警报模块、语音播报模块、定时器。
具体的,驱动电机2的一侧安设有防碰撞传感器,且连接万向轮4、主控模块12,2的一外侧安设有自动充电口6;通过驱动电机2驱动万向轮4行走时,防止撞到植物等,当没电时,控制模块控制机器人自动充电。
具体的,自动吸尘模块3的内部安设有粉碎结构、称量装置,且连接主控模块12;当地上有叶片或者垃圾均可吸入,通过粉碎结构将其搅碎,增大垃圾存放面积,且通过内部的称量装置称量垃圾较重时,通过无线传输模块,传到客户端,提示清理内部垃圾,使用非常简单方便。
具体的,喷洒头11的形状为圆盘状,其前侧开设有若干个密孔,且后侧安设有中空旋转平台,储水箱9与喷洒头11的之间的连接管上安设有自控阀,且连接主控模块12;根据不同花植物的灌溉情况,设置浇灌的阈值时间,且根据阈值时间进行定时植物的浇灌,省时省力。
具体的,摄像模块8、显示屏7、主控模块12电性连接;通过摄像模块8实时对周围的监控,当有人靠近植物,将拍照传到客户端,发出语音进行播报,提示养殖者,防止花卉被偷,定时拍摄花卉图片,通过无线传输模块传到客户端,可让养殖者欣赏、监控,在显示屏7上显示拍摄的花卉的图片。
本发明的工作原理及使用流程:在使用时,首先通过驱动电机2驱动万向轮4行走时,防止撞到植物等,当没电时,控制模块控制机器人自动充电,当地上有叶片或者垃圾均可吸入,通过粉碎结构将其搅碎,增大垃圾存放面积,且通过内部的称量装置称量垃圾较重时,通过无线传输模块,传到客户端,提示清理内部垃圾,使用非常简单方便,根据不同花植物的灌溉情况,设置浇灌的阈值时间,且根据阈值时间进行定时植物的浇灌,省时省力,通过摄像模块8实时对周围的监控,当有人靠近植物,将拍照传到客户端,发出语音进行播报,提示养殖者,防止花卉被偷,定时拍摄花卉图片,通过无线传输模块传到客户端,可让养殖者欣赏、监控,在显示屏7上显示拍摄的花卉的图片。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。
- 一种用于植物看护及培育机器人
- 一种植物培育机器人