用于重新定位物体的操纵装置
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及一种用于重新定位物体的操纵装置,具有附着抓握装置,所述附着抓握装置具有承载结构,在所述承载结构处构造有固定接口用于将附着抓握装置固定在定位装置处,通过所述定位装置,附着抓握装置在实施操纵运动时能够运动并且能够被定位,具有至少一个布置在承载结构处的抓握单元,所述抓握单元具有在附着抓握装置的主平面中在两个相对于彼此间隔开的保持区域之间延伸的、至少在一侧具有附着面的弯曲柔性的附着带,所述附着带具有引导穿过抓握单元的工作区域的长度区段,所述长度区段形成抓握区段,通过所述抓握区段,在工作区域中,待重新定位的物体通过附着面的附着作用能够被抓住并且能够是能够脱开地进行固定。
背景技术
从US 4 887 858中已知的所述类型的操纵装置包含具有附着带的附着抓握装置,所述附着带在两个相对于彼此间隔开的保持区域处卷上到各卷绕滚子上并且在绕两个换向滚子进行换向时引导穿过工作区域。附着带的在工作区域中延伸的长度区段形成抓握区段,所述抓握区段能够抓住并且为了分离的目的暂时固定柔软的、空气能够通过的物体。卷绕滚子配属有带运输驱动机构,在当前处于使用中的抓握区段由于污染被消耗时,通过所述带运输驱动机构能够产生附着带的不连续的运输运动。在工作区域中存在有具有空气流出喷嘴的块,压缩空气能够穿过所述空气流出喷嘴排出,所述压缩空气能够穿过当前被固定的物体,以便使其与处于其下的物体分离。
在EP 0 388 398 A2中描述一种用于将平坦的工件从粘附性的下膜片取下的装置。所述装置具有附着抓握装置,其装备有绕两个卷绕筒环绕的粘附膜片。粘附膜片能够被驱动做绕卷绕筒的环绕运动,以便将粘附在其处的工件放下。在所述放下过程中发生整个附着抓握装置关于以其它方式固定的工件的相对运动。
从DE 10 2012 001 095 B4中已知的抓握装置具有贴靠区段,在所述贴靠区段处布置有附着元件,其借助于贴靠区段能够挤压到待抓住的物体处。通过附着作用固定的物体根据需要又能够被放下,方式为,通过调整机构引起贴靠区段包括安置在其处的附着元件在内的形状改变。
从JP 2001- 315 981 A中已知的操纵装置具有能够被驱动做竖直的摆动运动的承载结构,在所述承载结构处存在有卷开滚子和卷上滚子,在其之间延伸有附着带,所述附着带也还以抓握区段围绕挤压滚子进行引导。在抓握区段处能够粘附有待重新定位的物件。挤压滚子能够转动地处于固定在承载结构处的载体轴上,从而其一起做承载结构的摆动运动。所述挤压滚子处于壳体状的挤压元件中,所述挤压元件通过调节磁体相对于挤压滚子能够运动并且通过弹簧向下方被预紧。为了脱开物件,之前被激活的调节磁体被解除激活,从而挤压元件通过弹簧的力相对于挤压滚子向下方移动并且将物件从附着带挤走。备选地,物件能够为了其脱开首先通过挤压元件向下方被挤压到基座处,而其没有被从附着带挤走。真正的脱开接着通过如下方式发生,即承载结构与挤压滚子一起相对于通过弹簧固定的挤压元件向上方摆动。
从在JP S62- 249 836 A中得知如下操纵装置,其具有在两个卷绕滚子之间走向的附着带,所述附着带围绕作为挤压滚子起作用的引导滚子进行缠绕。引导滚子能够转动地支承在能够上下运动的承载结构处。粘附在附着带处的物件的脱开借助于分离的脱开杠杆来进行,所述脱开杠杆能够通过气缸进行摆动,以便从上方作用于经固定的物件并且将其从附着带挤走。
在DE 11 35 738 A中描述的操纵装置中,粘接带围绕多个换向滚子进行缠绕,在所述换向滚子之下存在有两个布置在下方的粘附剂载体滚子。粘接带的当前围绕粘附剂载体滚子缠绕的长度区段作为抓握区段起作用。为了将粘附在抓握区段处的物件脱开,操纵解锁机构,通过所述解锁机构激活弹簧,从而粘附剂载体滚子相对于挤压板向上方移动,其中,粘附性的物件通过挤压板拦住并且从抓握区段挤走。
发明内容
本发明基于如下任务,即采取如下措施,所述措施在装备有附着带的附着抓握装置的情况下尤其有利于之前被抓住和固定的物体的简单的和可靠的脱开。
为了解决所述任务,结合开头提及的特征设置成,附着抓握装置包括构造成用于脱开通过附着带的抓握区段抓住的物体的脱开机构,所述脱开机构具有至少一个布置在抓握单元的工作区域中的、由附着带部分地缠绕并且在主平面中相对于承载结构为了实施脱开运动能够平移地运动的脱开换向元件并且所述脱开机构除此之外具有布置在承载结构处的脱开驱动机构,通过所述脱开驱动机构能够引起抓握区段的伴随脱开换向元件的脱开运动的、促使附着带从被抓住的物体主动地取下的、绕脱开换向元件的环绕运动。
根据本发明的操纵装置包括附着抓握装置,所述附着抓握装置具有至少一个装备有附着带的抓握单元。附着带的长度区段作为抓握区段起作用,所述抓握区段在抓握单元的工作区域中延伸并且能够将待重新定位的物体通过粘附作用能够脱开地进行固定。抓握单元由附着抓握装置的承载结构承载,所述附着抓握装置设有固定接口,通过所述固定接口,附着抓握装置安置或能够安置在定位装置处、例如在机器人的能够运动的臂处。由此,存在如下可能性,即使附着抓握装置包括其抓握单元在内在实施操纵运动的情况下进行运动并且在此对经固定的物体在空间上进行重新定位。因为固定效应基于附着作用,所以不仅刚性的物体而且柔软的和甚至空气能够通过的物体能够被可靠地抓住和固定。在此,尤其考虑纺织物。附加地集成到附着抓握装置中的脱开机构在每种物体类型中都实现在期望的放下位置处从附着带的抓握区段根据需要可靠地脱开。脱开机构具有至少一个布置在抓握单元的工作区域中的脱开换向元件,所述脱开换向元件由在两个相对于彼此间隔开的保持区域之间延伸的附着带部分地缠绕。脱开换向元件的特点在于其在附着带的被称为主平面的延伸平面中相对于承载结构的平移的能够运动性。由此,能够借助于脱开机构的脱开驱动机构引起附着带的抓握区段绕脱开换向元件的环绕运动,所述环绕运动与脱开换向元件相对于承载结构的被称为脱开运动的移位运动相组合。所述过程引起附着带从当前被抓住的物体主动地取下。抓握区段在所述脱开过程中沿其纵向方向逐渐地从一侧到另一侧被取下并且由此几乎从直至那时被固定的物体脱落。待重新定位的物体能够由此尽管有其结构上的构建也被可靠地重新定位并且在目标位置处又被可靠地放下。平移的脱开运动优选是线性运动,但是还能够是非线性的运动,尤其跟随弧形、优选圆弧形的运动。
本发明的有利的改进方案从从属权利要求中得出。
附着带优选地涉及粘接带,尤其涉及自粘带,其附着面由自粘面形成。为了形成自粘面而使用的粘接剂能够涉及物体地进行选择。取决于待操纵的物体的特征应用具有特别好地适用的自粘性的粘接特性的附着带。自粘带的应用具有如下优点,即在附着抓握装置的运行期间不必施加粘接剂。
附着带备选地还能够例如如下地构造,使得附着作用基于所谓的范德华力。这样的附着力能够例如通过如下方式实现,即附着带在附着面处设有由离散地构造的粘附印记构成的微观结构,其中,附着带优选地由在一侧以硅酮膜片进行涂层的载体带制成,其中,硅酮膜片设有微观结构。粘附面的相应的设计方案在开头提到的DE 10 2012 001 095 B4中进行描述。
附着带能够在所述两个保持区域中固定地固定在承载结构处。如果抓握区段被消耗或被磨损,那么在这情况下附着带能够被简单地更换。然而,优选的是如下实施方式,其中,附着带在所述两个保持区域中围绕相应卷绕滚子进行卷绕,所述卷绕滚子关于承载结构能够绕相对于主平面成直角的转动轴线进行转动。所述卷绕滚子中的一个形成供未被消耗的附着带使用的卷开滚子,而另一个卷绕滚子作为容纳被消耗的附着带的卷上滚子起作用。如果抓握区段被消耗,那么能够在工作区域中很简单地对新的抓握区段进行定位,方式为,附着带一段距离远地从卷开滚子盘绕到卷上滚子上。
结合之前提及的卷绕滚子,附着抓握装置能够构造成用于手动地盘绕附着带。例如手动操纵环节能够与卷上滚子耦联,所述手动操纵环节能够用手进行操纵,例如手摇柄。如下实施方式被视为较有利的并且特别是较舒适的,在所述实施方式中,每个抓握单元为了将附着带从卷开滚子盘绕到卷上滚子上而具有带运输驱动机构,所述带运输驱动机构例如能够电地或借助于流体力进行操纵并且能够通过接入操纵信号促使引起附着带的运输运动以使附着带前进(Weitertakten)。带运输驱动机构能够构造成用于手动地激活,例如借助于合适的切换器进行激活或还用于借助于操纵装置的电子控制机构受传感器控制地或时间控制地进行操纵。
优选地,脱开换向元件具有由附着带缠绕的、弧形地弯曲的换向面。由此,在与在抓握区段与脱开换向元件之间的相对运动相关的物体脱开过程中得出附着带的有利的材料保护并且相应于此地得出减少的磨损。由附着带缠绕的弧长优选以少于180度延伸。实际的缠绕角度尤其取决于在抓握单元中实现的附着带的带引导。
原则上,脱开换向元件能够是不能够旋转的滑动元件,附着带以其与附着面相对的背面能够滑动移位地贴靠在所述滑动元件处。然而优选地,脱开换向元件构造为换向滚子,所述换向滚子能够相对于承载结构绕相对于主平面成直角的转动轴线进行转动。脱开换向元件的径向地定向的外周缘面界定用于附着带的换向面。在此有利的是,滚子形的脱开换向元件在其脱开运动时并且还在附着带的可能的运输运动中能够磨损少地在附着带的抓握区段处滚动。
在操纵装置的可行的实施方式中,附着抓握装置具有仅仅一个唯一的抓握单元。这样的结构形式尤其推荐用于对相对小的物体进行重新定位。
在操纵装置的同样有利的实施方式中,附着抓握装置装备有多个布置在承载结构处的抓握单元,所述抓握单元分别具有专用的工作区域,附着带的抓握区段引导穿过所述工作区域并且所述工作区域分别配属有专用的脱开换向元件。多个抓握单元能够例如逐点地如下地分布地进行布置,使得得出多个工作区域,所述工作区域处于共同的工作平面中。多个抓握单元例如矩阵式地分布地进行布置。这有利于对大面积的物体进行操纵。优选地,多个抓握单元能够以彼此协调的方式运行。
在操纵装置的优选的实施方式中,附着抓握装置装备有两个或还更大数量的布置在承载结构处的抓握单元,其中至少一个抓握单元相对于承载结构和至少一个另外的抓握单元是能够调节和能够定位的。在此,多个抓握单元的工作区域适宜地始终处于共同的工作平面中,然而能够如下地定位,使得其在工作平面中相对于彼此占据不同的相对位置。优选地,多个和尤其全部抓握单元以这种方式相对于承载结构并且还相对于彼此是能够调节和能够定位的。
例如在承载结构处如下地布置有四个抓握单元,使得其成对地对置,其中,在每个抓握单元对的抓握单元之间存在的间距能够可变地进行调整。优选地,每个抓握单元对处于平行于工作平面的直线上,其中,这两条直线成直角地相交。
操纵装置例如如下地构造,使得至少一个抓握单元的调节能够在实施操纵过程之前进行,以便使多个抓握单元关于待操纵的物体最优地进行取向。
此外,操纵装置能够如下地进行构造,使得至少一个抓握单元相对于承载结构的调节能够在操纵过程期间进行,尤其在已经被抓住和固定的物体的情况下进行。就柔软的物体、尤其纺织的物体、例如织物幅而言,这尤其实现物体在再放下之前被张紧。
抓握单元的调节能够尤其马达地借助于至少一个例如能够电地或通过流体力操纵的驱动机构引起。操纵装置的电子控制机构能够控制伺服马达的操纵。附加地或备选地,还能够设置有手动的能够调节性。
在装备有多个抓握单元的附着抓握装置的优选的设计方案中,多个抓握单元的工作区域沿平行于附着抓握装置的主平面的主方向相对于彼此间隔开地进行布置。也就是说,多个工作区域处于相同的平面中,附着带也在所述平面中延伸。这特别有利于对具有大的结构长度的物体进行操纵。
多个工作区域优选如下地进行布置,使得其沿附着抓握装置的高度方向与彼此处于相同的高度上。所述工作区域然后共同处于相对于主平面成直角地延伸的工作平面中。
附着抓握装置的多个抓握单元能够独立于彼此地进行构造并且分别具有专用的附着带。在此,每个附着带在承载结构的两个单独配属于其的、例如由各卷绕滚子形成的保持区域之间走向。这样的设计方案的优点是,多个抓握单元能够相对简单地独立于彼此地进行使用。例如在脱开过程中附着抓握装置的多个抓握单元能够时间上相对于彼此错开地从物体脱开。
在装备有多个抓握单元的附着抓握装置中被视为特别有利的是,同一附着带同时被用作用于多个抓握单元的附着带。附着抓握装置的多个抓握单元然后共同配属有在承载结构的两个保持区域之间走向的附着带。所述共同的附着带引导穿过多个抓握单元的工作区域,其中,引导穿过所述工作区域的抓握区段由同一附着带的相对于彼此间隔开的长度区段形成。这样的实施方式有利于多个抓握单元的同步的操纵。此外,在附着抓握装置中同时待应用的附着带的数量得到降低。
在操纵装置的特别成本适宜的实施方案中,在至少一个并且优选每个抓握单元的工作区域中仅仅存在脱开换向元件作为用于附着带的换向元件。这通常导致,抓握区段以弧形的纵向走向穿过工作区域。在这样的结构形式中,在抓握区段与待抓住的物体之间的接触面相对小,从而物体被很保护性地处理。
备选地,至少一个抓握单元能够在其工作区域中除了脱开换向元件之外具有关于其在主平面中间隔开的另外的换向元件用于附着带,所述另外的换向元件如脱开换向元件一样由附着带部分地缠绕。抓握区段以优选地线性的纵向走向在脱开换向元件与另外的换向元件之间延伸。在脱开换向元件的能够通过脱开驱动机构引起的脱开运动中,在脱开换向元件与另外的换向元件之间的间距减小,从而抓握区段的与固定的物体附着地共同作用的面区段和因此保持力在量上减小。
优选地,脱开换向元件和另外的换向元件在每个抓握单元中布置在共同的平面中,所述平面相对于附着抓握装置的高度方向成直角地走向。
优选地,配属于工作区域的另外的换向元件涉及关于承载结构位置固定的、固定的换向元件。与脱开换向元件不同,所述另外的换向元件在脱开过程中保持其关于承载结构的空间上的相对位置。这减小了用于实现抓握单元的运动学上的消耗。然而基本上可行的是,抓握单元如下地进行构造,使得另外的换向元件还形成脱开换向元件,所述脱开换向元件在脱开过程中实施或能够实施关于承载结构在主平面中的平移的相对运动。
不管另外的换向元件关于承载结构是固定的还是能够运动的,有利的是,所述另外的换向元件构造为关于承载结构绕相对于主平面成直角的转动轴线能够转动的换向滚子。优选地,不仅脱开换向元件而且另外的换向元件分别构造为这样的能够转动的换向滚子。每个换向滚子优选地能够自由转动地进行支承并且不直接与驱动机构耦联。
优选的设计方案设置成,脱开换向元件通过弹簧机构借助弹簧力预紧到抓握位置中。为了抓住物体,附着抓握装置通过承载其的定位装置的相应的操纵在处于抓握位置中的脱开换向元件的情况下能够以抓握区段移开到待抓住的物体处。能够设置成,脱开换向元件在将抓握区段挤压到物体处时克服弹簧力偏离或能够偏离。这例如直至物体贴靠在附着抓握装置的物体支撑机构处。无论如何在通过弹簧机构预紧的脱开换向元件的情况下有利的是,所述脱开换向元件通过能够由脱开驱动机构引起的脱开运动能够克服弹簧力并且相对于承载结构运动到至少一个与抓握位置不同的脱开位置中。由此,围绕脱开换向元件引导的抓握区段从待脱开的物体取下。所述过程能够有利地通过如下方式支持,即物体通过物体支撑机构在跟随脱开换向元件方面主动地被阻碍。这在操纵柔性的、尤其柔软的物体、如例如纺织物体时是特别有利的。
脱开驱动机构根据本发明的优选的方面如下地进行构造,使得通过其能够将引起脱开换向元件的脱开运动的牵引力导入到附着带中。牵引力尤其能够沿带纵向方向导入到附着带中。换言之,脱开驱动机构构造成用于在附着带处牵引,其中,由于如下情况,即所述附着带固定在保持区域的一个中,附着带以与附着面相对的背面挤压到脱开换向元件处并且其借助由此引起的压力为了实施脱开运动而进行移位。所述设计方案能够结合通过弹簧机构弹性地预紧到抓握位置中的脱开换向元件特别有利地实现。
为了将牵引力导入到附着带中,脱开驱动机构适宜地具有至少一个在保持区域中的一个中驱动式地与附着带共同作用的驱动马达,所述驱动马达优选地电操纵,备选地但是例如还能够是能够通过流体力操纵的结构类型。优选地,所述两个保持区域中的仅仅一个被机动化,而第二保持区域无驱动地进行构造并且尤其具有构造成用于至少在导入牵引力期间能够脱开地固定附着带的制动器。在此,能够涉及主动的、例如能够电操纵的制动器或涉及被动的制动器,其例如基于卡锁功能并且其制动作用仅仅直至被导入到附着带中的牵引力达到一定的高度才出现。
被视为特别适宜的是,脱开驱动机构为了引起脱开换向元件的脱开运动独立于附着带驱动式地与脱开换向元件耦联。由此,脱开换向元件能够通过脱开驱动机构驱动直接相对于承载结构来实施脱开运动。从所述脱开运动中然后直接得出附着带关于脱开换向元件的相对运动,由所述相对运动引起抓握区段的开头提到的绕脱开换向元件的环绕运动。
显然,脱开驱动机构还能够如下地实施,使得抓握区段绕脱开换向元件的环绕运动和脱开换向元件的脱开运动能够通过不仅对附着带而且对脱开换向元件同时驱动式地施加影响来引起。
在每个抓握单元中,脱开换向元件适宜地位置固定地处于关于承载结构分离的保持单元处,所述保持单元本身为了引起脱开换向元件的脱开运动以实施保持单元运动而在承载结构处关于其能够运动地进行支承。布置在承载结构处的脱开驱动机构驱动式地与保持单元耦联。能够通过脱开驱动机构引起的保持单元关于承载结构的相对运动直接导致脱开换向元件的脱开运动的脱开运动。
优选地,保持单元能够线性移位地支承在承载结构处,尤其根据滑块的类型。合适的支承器件、例如至少一个引导轨道能够促使保持单元关于承载结构的磨损少的移位支承。
附着抓握装置的有利的实施方式具有两个抓握单元,所述抓握单元分别具有配备有脱开换向元件的保持单元,其中,所述两个保持单元如下地运动式地与彼此同步,使得其为了引起所述两个由其承载的脱开换向元件的脱开运动分别在实施保持单元运动时相对于承载结构能够朝彼此运动。
作为有利的装备措施,附着抓握装置优选地具有物体支撑机构,所述物体支撑机构适用于支撑被抓住或待抓住的物体。所述直接的支撑作用通过物体支撑机构的至少一个配属于抓握单元的工作区域的支撑元件引起。每个支撑元件具有支撑面,其沿与在至少一个抓握区段处的附着面相同的方向指向。
至少一个支撑元件根据特别成本适宜的实施方式位置固定地安置在承载结构处。在功能上特别有利的设计方案中,至少一个支撑元件能够相对于承载结构进行运动,从而所述支撑元件关于其能够实施行程运动,在所述行程运动的情况下,所述支撑元件能够根据行程方向移近到工作区域处或能够从工作区域移开。装备有至少一个能够运动的支撑元件的物体支撑机构适宜地具有构造成用于产生行程运动的行程驱动机构,所述行程驱动机构优选地是能够通过流体力操纵的类型,但是毫无问题地还能够以电能够操作的方式进行实施。
优选地,附着抓握装置为了抓住物体以至少一个支撑元件事先置放到待操纵的物体处。如果支撑元件能够运动地进行构造,那么行程运动能够在抓住物体之后被用于通过如下方式来支持物体从抓握区段的脱开过程,即将物体从抓握区段挤走。
物体支撑机构能够尤其在抓握过程中优选地还用作夹具,其对待抓住的物体进行固定。
物体支撑机构还能够应用于支撑被抓住的物体并且将其稳定在其固定的位置中,直至所述物体又被放下。
物体支撑机构的至少一个支撑元件能够弹性屈服地进行悬挂,从而所述支撑元件在抓住物体时能够通过与物体的接触被压回,直至抓握区段粘附在物体处。
适宜地,开头提到的能够以有利的方式应用于操纵附着抓握装置的定位装置是操纵装置的直接的组成部分。
附图说明
随后,根据附上的附图更详细地阐释本发明。其中:
图1示出根据本发明的操纵装置的优选的实施方式的示意性的图示,其中,仅仅示意性地说明的附着抓握装置装配在适用于引起附着抓握装置的操纵运动的定位装置处,
图2以借助根据来自图3的箭头II的视线方向的侧视图示出附着抓握装置的优选的第一实施方式,其中,示出在抓住待重新定位的物体时的运行阶段,
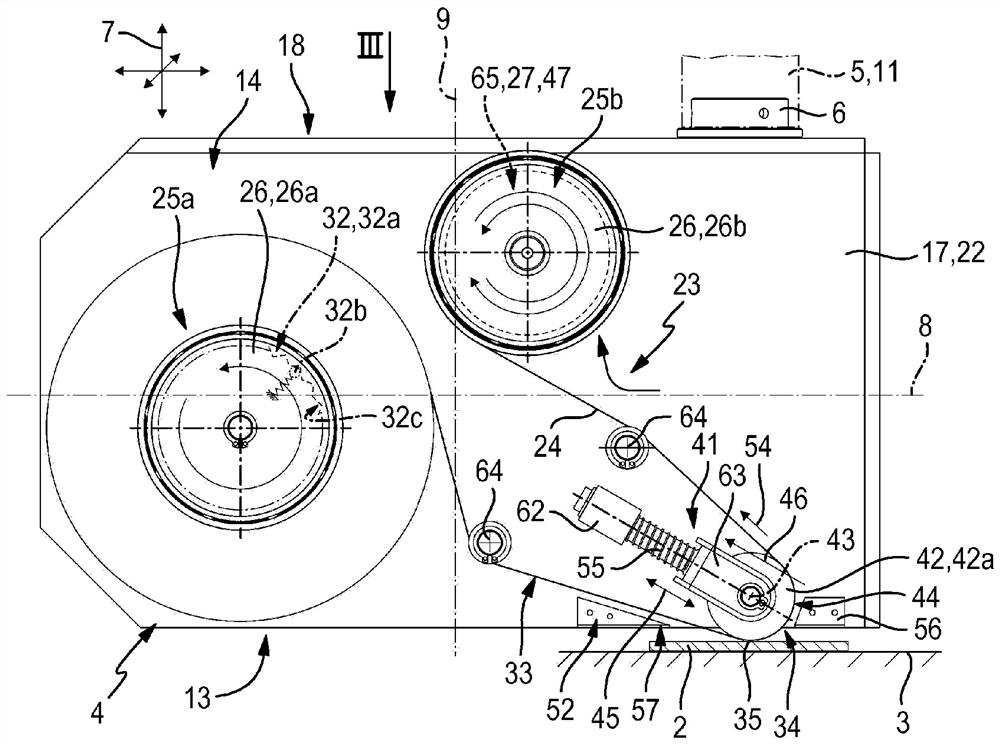
图3以沿根据来自图2的箭头III的视线方向的俯视图示出来自图2的附着抓握装置,
图4以与在图2中相同的视线方向并且同样在抓住物体时的运行阶段中示出来自图2的附着抓握装置,
图5沿根据来自图3的箭头II的视线方向示出在之前被抓住和固定的物体的脱开的运行阶段期间的图2至4的附着抓握装置,
图6以借助根据来自图7的箭头VI的视线方向的侧视图示出在抓住物体之前的运行阶段中的附着抓握装置的另外的实施方式,所述物体被说明为处于底座上,
图7示出根据来自图6和11的剖切线VII-VII通过附着抓握装置的剖切面,
图8示出根据来自图6和11的剖切线VIII-VIII通过附着抓握装置的另外的剖切面,
图9示出根据来自图6和11的剖切线IX-IX通过附着抓握装置的另外的剖切面,
图10示出根据来自图6和11的剖切线X-X通过附着装置的另外的剖切面,
图11示出根据来自图7的剖切线XI-XI通过附着抓握装置的另外的剖切面,
图12以根据来自图7的箭头XII-XII的视线方向示出根据图6至11的附着抓握装置的另外的侧视图,从而能够识别出附着抓握装置的与图6相对的侧,
图13以相应于图11的剖切图示示出在抓住摆放在底座上的物体的运行阶段时的附着抓握装置,
图14沿根据来自图7的箭头XII的视线方向示出来自图13的组件,
图15以相应于图11和13的剖切图示示出在抓住物体时的另外的运行阶段,
图16以借助根据来自图7的箭头XII的视线方向的侧视图示出来自图15的组件,
图17以相应于图11、13和15的剖切图示示出附着抓握装置在脱开之前被抓住的物体时的运行阶段,以及
图18以借助根据来自图7的箭头XII-XII的视线方向的侧视图示出来自图17的组件。
具体实施方式
在执行用于重新定位物体的方法时,图15和16还代表如下运行阶段,在所述运行阶段中物体被抓住并且通过能够由定位装置引起的操纵运动的实施能够被重新定位。同时,图13和14代表在脱开之前被抓住的物体时的运行阶段。同时,图17和18反映在抓住物体时的运行阶段,其接着图6至12的运行阶段。
再次进行概括,在图6至18的实施例中,在用于重新定位物体的循环中,图6至12代表第一运行阶段,图17和18代表随后的第二运行阶段,图13和14代表随后的第三运行阶段,图15和16代表随后的第三运行阶段,图13和14又代表随后的第五运行阶段,图17和18又代表随后的第六运行阶段并且最终图6至12重新代表最后的第七运行阶段。
在图1中示出操纵装置1,所述操纵装置构造成对任意的物体2进行重新定位。“重新定位”这一概念尤其理解为,在出发点处容纳物体2并且在一定的移位之后又在目标点处放下。通常出发点和目标点相对于彼此间隔开,然而其还能够叠合。在出发点处被容纳的物体2能够例如在重新定向之后在与出发点一致的目标点处又被放下。
待重新定位的物体2适宜地通过提供装置3提供到其重新定位部,所述重新定位部在最简单的情况下涉及底座,例如涉及台子,物体2被放下在所述台子上。提供装置3能够是操纵装置1的组成部分。
作为主要构件,操纵装置1包含附着抓握装置4。所述附着抓握装置能够为了重新定位过程的目的将物体2抓住、固定并且又松开。所述附着抓握装置4在图1中仅仅象征性地进行描绘,有利的实施方式在图2至18中说明。
在其根据规定的使用中,附着抓握装置4适宜地被安置在定位装置5处,所述定位装置适宜地同样形成操纵装置1的组成部分。附着抓握装置4具有固定接口6,所述固定接口例如构造为适用于旋拧固定的固定法兰并且在其共同作用下附着抓握装置4能够固定或固定在定位装置5处,尤其以能够脱开的方式进行固定。
定位装置5在所说明的实施例中由机器人形成,所述机器人具有通过未进一步说明的马达的驱动器件以多个运动自由度能够运动的机器人臂11,附着抓握装置4以其固定接口6装配在所述机器人臂处。定位装置5例如电地和/或气动地和/或液压地被驱动。与所说明的不同,定位装置3能够例如还具有门状的(portalartigen)结构。
通过定位装置5的相应的运行,附着抓握装置4能够被驱动做示意性地通过箭头说明的操纵运动7。在所述操纵运动7的范围中,能够发生已经提到的物体2的重新定位。操纵运动7优选地是三维的运动,但是完全还能够局限于仅仅二维的或仅仅一维的运动。毫无问题地,旋转的运动自由度也还是可行的并且尤其是能够叠加的。
附着抓握装置4具有想象的主轴线8,所述主轴线在操纵装置1的通常的运行方式的情况下水平地定向。附着抓握装置4除此之外具有垂直于主轴线8的想象的竖轴线9。所述竖轴线在操纵装置1的通常的运行方式的情况下竖直地取向。主轴线8和竖轴线9共同撑开主平面12。主平面12在图2、4、5、6和11至18中平行于附图平面走向。
附着抓握装置4也还具有想象的横向轴线10,其垂直于主平面12走向。
为了简化,在下面,主轴线8的轴线方向被称为主方向8,竖轴线9的轴线方向被称为高度方向9以及横向轴线10的轴线方向被称为横向方向10,其中,为了简化相应地应用一致的附图标记。
附着抓握装置4的两个彼此相对的沿横向方向10定向的侧在下面为了较好的区分还被称为前侧15和背侧16。
尽管其命名,所提到的轴线8、9、10以及方向和侧说明并没有预设附着抓握装置4在其运行期间的强制性的取向。附着抓握装置4例如还能够以如下取向得到使用,沿所述取向,在附图中沿高度方向9向下方指向的下侧13向侧面和/或向上方定向。
对附着抓握装置4的实施例的当前的描述只要没有在个别情况中做出不同的说明就涉及所说明的所有实施例。
附着抓握装置4具有负责其稳定性的承载结构14。所述承载结构实际上形成附着抓握装置4的支架,相关的构件直接或间接地安置在所述支架处。固定接口6处于承载结构14处。承载结构14因此始终直接一起做操纵运动7。
在图2至5的实施例中,承载结构14基本上包括在主平面12中延伸的承载板17。
在图6至18的实施例中,承载结构14包含配属于前侧15的前方的承载元件14a、关于其沿横向方向10间隔开的后方的承载元件14b和两个将承载元件14a、14b在沿主方向8定向的端部区域处与彼此连接的横向元件14c。在附着抓握装置4的与下侧13相对的上侧18处,所述两个承载元件14a、14b优选地通过轭元件14e与彼此连接。在所述两个至少基本上平行于主平面12延伸的前方的和后方的承载元件14a、14b之间存在有承载结构14的相对于所述两个承载元件14a、14b沿横向方向10间隔开的中间元件14d,所述中间元件例如固定在所述两个横向元件14c处。
承载结构14具有承载区段22,所述承载区段在图2至5的实施例中由承载板17形成。在图6至18的实施例中,承载区段22包括中间元件14d和后方的承载元件14b的与中间元件14d沿横向方向10有间距地对置的部分区段14b'。
理解的是,承载区段22与承载结构14一样整体上能够以其它的结构方式实现。
固定接口6在图2至5的实施例中处于上侧18的区域中的承载板17处。在其它的实施例中,其在前方在外部构造在前方的承载元件14a处。
在承载结构14处布置有至少一个抓握单元23。在图2至5的实施例中,承载结构14承载仅仅一个唯一的抓握单元23。同一抓握单元在此处布置在承载板22处,尤其在前侧15的区域中。
在图6至18的实施例中,承载结构14配备有多个抓握单元23,其中,其具体地具有两个抓握单元23。所述两个抓握单元优选地安置在承载区段22处。所述两个抓握单元23沿主方向8彼此相邻地进行布置。
每个抓握单元23包含弯曲柔性的、优选地然而具有高的抗拉强度的附着带24。所述附着带尤其由塑料材料制成并且优选地膜片状地薄。
附着带24在两个在主平面12中相对于彼此间隔开的第一和第二保持区域25a、25b之间延伸,在所述保持区域中,所述附着带以两个彼此相对的带端部区段中的相应一个固定在承载结构14处,示范性地在承载区段22处。
适宜地,每个抓握单元23在每个保持区域25a、25b中具有能够转动地支承在承载结构14处的卷绕滚子26。卷绕滚子的转动轴线相对于主平面12成直角地走向。布置在第一保持区域25a中的卷绕滚子26设计为卷开滚子26a,在其上卷上和提供有未被消耗的附着带24。布置在第二保持区域25b中的卷绕滚子26涉及卷上滚子26b,所述卷上滚子能够以卷上的方式容纳被消耗的附着带24。
借助于布置在承载结构14处的、至少作用于卷上滚子26b的带运输驱动机构27,附着带24能够从卷开滚子26a渐渐盘绕到卷上滚子26b上。优选地,带运输驱动机构27能够如下地通过优选地构造为操纵装置1的组成部分的电子控制机构28进行操控,使得发生不连续的盘绕过程。也就是说,盘绕能够以如下程度调时地发生,其中附着带24在运行附着抓握装置4时遭受长度区段式的消耗或磨损。
带运输驱动机构27适宜地还与卷开滚子26a运行式地进行连接,以便在盘绕过程中实现经监控的追踪并且以便保证附着带24被保持在一定的张力之下。
示范性地,带运输驱动机构27包含与卷上滚子26b驱动式地连接的、优选地电驱动马达29。除此之外,其优选地包含驱动式地与卷开滚子26a耦联的、尤其能够电操纵的制动器32。驱动马达29和制动器32能够以彼此协调的方式通过电子控制机构28进行操控,以便引起调时的盘绕并且以便在盘绕过程之外获得期望的带张力。
电子控制机构28此外优选地还构造成用于对定位装置5电子地进行操控以引起对于附着抓握装置4期望的操纵运动7。电子控制机构28为此联接到定位装置5处。
图2至5的实施例说明,代替能够通过控制机构28影响的制动器32还能够设置有自动地工作的并且在没有待供应的控制信号的情况下工作的制动器32。在此,尤其涉及卡锁制动器32a,在所述卡锁制动器中,弹簧加载的卡锁环节32b与设置在卷开滚子26a处的卡锁齿部32c共同作用。在此,卷开滚子26a通过形状配合的卡锁如此久地被不能够扭转地固定,直到借助于驱动马达26b将牵引力导入到附着带24中,所述牵引力足够大,以便克服卡锁阻力。
附着带24至少在一侧并且优选地仅仅在一侧设有发挥能够被脱开的粘附作用的附着面33。例如附着带24包含载体带,所述载体带以起附着作用的、界定附着面33的附着层进行涂层。优选地,附着带24是自粘带,其中,附着面33由自粘面形成。
每个抓握单元23具有工作区域34,弯曲柔性的附着带24延伸穿过所述工作区域。附着带的在工作区域34中走向的长度区段被用于抓住和固定待重新定位的物体2并且因此为了更好的区分被称为抓握区段35。
在工作区域34中附着带24如下地进行构造,使得附着面33的处于抓握区段35处的区段远离附着抓握装置4。优选地并且相应于实施例,工作区域34处于附着抓握装置4的下侧13的区域中,其中,抓握区段35的附着面33向下方指向。
相应于具有抓握单元23的多重装备,图6至18的附着抓握装置具有多个、示范性地具有两个工作区域34。因此还存在相应数量的抓握区段35。多个工作区域34和由此还有多个抓握区段35优选地沿主方向8相对于彼此间隔开地进行布置。其适宜地关于高度方向9在相同的高度上处于共同的、相对于竖轴线9成直角的工作平面36中。
为了抓住物体2,附着抓握装置4能够通过根据图13、14、17和18的操纵运动7借助置放运动37如下地置放到物体2处,使得抓握区段35以构造在其处的附着面33到达贴靠在待抓住的物体2处。如果接着附着抓握装置4通过进一步的操纵运动7进行移位,那么物体2保持粘附在抓握区段35处并且一起做进一步的操纵运动7。相应的内容适用于图2至5的实施例,其中,置放运动在图4中进行说明。
附着抓握装置4装备有脱开机构41,借助所述脱开机构,抓握区段35在需要时又能够从通过其进行固定的物体2脱开,以便将物体2又放下在操纵过程的期望的目标点处。
至少一个布置在抓握单元23的工作区域34中的、由附着带24部分地缠绕的脱开换向元件42属于脱开机构41。对于所说明的实施例而言一致的是,每个工作区域34配属有仅仅一个这样的脱开换向元件42。
脱开换向元件42适宜地由换向滚子42a形成,其如下地能够转动地进行支承,使得其能够绕相对于主平面12成直角的转动轴线43相对于承载结构14进行转动。转动轴线43与换向滚子42a的纵向轴线叠合。优选地,形成脱开换向元件42的换向滚子42a能够自由转动地进行支承。
换向滚子42a的关于转动轴线43径向地向外指向的周缘面形成弧形地弯曲的换向面44,附着带24围绕所述换向面进行缠绕。换向面44的具体被缠绕的弧长适宜地为小于180度。在图2至5的实施例中,所述弧长为大约150度,在图6至18的实施例中为大约100度。
当在应用带运输驱动机构27的情况下发生盘绕过程时,脱开换向元件42在移动经过的附着带24的与附着面33相对的背面处滚动。
在未示出的实施例中,脱开换向元件38不能够扭转地进行构造,其中,换向面44作为滑动面起作用,在其处附着带24在提到的盘绕过程时进行转向。脱开换向元件38能够在此例如是换向块或换向杆。
尽管有其具体的实现方式,脱开换向元件42如下地集成到附着抓握装置4中,使得其在主平面12中相对于承载结构14能够平移地来回运动。所述在附图中通过双箭头说明的、被称为换向元件运动45的相对运动优选地涉及线性运动。根据未说明的实施例,平移的换向元件运动45能够是非线性运动,例如跟随弧形、尤其圆弧形的运动。在换向元件运动45时,脱开换向元件42整体上改变其关于承载结构14所占据的相对位置。
换向元件运动45包括在附图中通过箭头说明的脱开运动46,其相应于换向元件运动45跟随直线的或非线性的、例如弯曲的轨道。所述脱开运动46对于被抓住的物体2从抓握区段35的脱开是重要的。
此外,脱开机构41包含布置在承载结构处的脱开驱动机构47。所述脱开驱动机构能够引起附着带24的抓握区段35围绕所配属的脱开换向元件42的在图4、5、11、13和15中通过箭头说明的环绕运动48并且就此而言同时还引起脱开换向元件42的关于承载结构14平移的脱开运动46。所述在下面还被称为“脱开行为”的过程促使抓握区段35从粘附在其处的物体2主动地取下,从而物体2从附着抓握装置4完全地或部分地脱开。
与脱开行为相关的取下过程不必涉及粘附在物体2处的抓握区段35的整个长度。但是完全的取下完全能够是这种情况并且示范性地在图2至5的实施例中出现。然而,取下过程还能够如下地发生,使得在环绕运动48和伴随其的脱开运动46之后,抓握区段的原来的面的剩余区域还保持粘附在物体2处,从而还应该接着有附加的最后的脱开措施,以便将物体2完全地从在其起作用的面方面减少的抓握区段35去除。所述最后的脱开措施尤其在于将粘附性的物体2从抓握区段35的附着面33挤走。当物体2在脱开行为中具有向下方落下的可能性时,在物体2的相应的重量的情况下这能够仅仅重力决定地进行。备选地,附着抓握装置4能够装备有物体支撑机构52,其能够如下地支撑在经固定的物体2处,使得同一物体主动从抓握区段35挤走。那么,所述物体支撑机构52形成脱开机构41的组成部分。
图2至5的实施例说明如下有利的可行方案,即将脱开驱动机构47如下地进行构造,使得通过所述脱开驱动机构能够将引起脱开换向元件42的脱开运动46的牵引力54导入到附着带24中。
脱开驱动机构47在此由带运输驱动机构27形成,从而进一步在上面已经提到的驱动马达29和制动器32属于所述脱开驱动机构。为了将牵引力54导入到附着带24中,卷上滚子26b通过驱动马达29在卷上意义上能够旋转地被驱动,而同时卷开滚子26a能够借助于制动器32卡住,从而没有附着带24能够跟随。结果是附着带24的在所述两个卷绕滚子26之间延伸的长度区段的缩短,具有如下结果,即抓握区段35的围绕脱开换向元件42缠绕的区域将脱开换向元件42从工作区域34挤回,从而附着带24从物体2取下并且尤其是脱落。
为了实现所述功能性有利的是,脱开换向元件42通过弹簧机构55借助于弹簧力预紧到从图2和4中能够看出的抓握位置中,在所述抓握位置中,围绕脱开换向元件42缠绕的抓握区段35能够与定位在工作区域34中的物体2粘附性地进入接触中。在脱开行为中能够通过激活脱开驱动机构47将脱开换向元件42在克服弹簧机构55的弹簧力的情况下压回到从图5中能够看出的、从物体2升起的脱开位置中。
脱开驱动机构47在未说明的实施例中分离地并且独立于带运输驱动机构27进行构造。
根据图2至5的附着抓握装置4具有布置在工作区域34中的物体支撑机构52,其具有一个或多个固定地布置在承载结构14处的支撑元件56。至少一个支撑元件56在侧面包围或框住工作区域34并且具有沿与抓握区段35的附着面33相同的方向指向的支撑面57用于物体2。在被抓住和固定的状态中,物体贴靠在支撑面57处。当在脱开行为时以牵引力54进行加载的抓握区段35与脱开换向元件42一起关于支撑面57的平面被挤回时,物体2通过至少一个支撑元件56被拦住,从而发生粘附连接的分离。因此不再被固定的物体2能够根据在图5中的箭头58向下方落下或放下。
至少一个支撑面57适宜地沿高度方向9向下方定向。相应于此地,脱开运动46相反地沿朝着上侧18的方向走向。在未示出的实施例中,换向元件运动45和由此还有脱开运动46精确地沿高度方向9定向。然而有利的是,其相应于所说明的实施例在主平面12中关于竖轴线9倾斜地走向。
脱开换向元件42的能够运动的支承在图2至5的实施例中优选地通过如下方式实现,即在承载结构14处安置有支承元件62,其由承载脱开换向元件42的换向元件载体63的柄杆能够滑动移位地穿过,其中,将构造为压力弹簧的弹簧机构55加入到换向元件载体63与支承元件62之间。
为了得到用于在主平面12中延伸的附着带24的有利的走向,在承载结构14处能够存在有另外的、例如由换向滚子或由换向棒形成的换向元件64。
对于每个抓握单元23适用的是,到附着带24的在所述两个保持区域25a、25b之间的带走向中能够接入有未进一步描绘的带翻转机构,通过所述带翻转机构,附着带24关于其纵向轴线以180度翻转,以便防止所述附着带以其附着面33与任意换向元件到达接触中。
图2至图5的附着抓握装置4尤其如下地进行构造,使得脱开换向元件42在未被操纵的状态中通过弹簧机构55预紧到从图2中能够看出的抓握位置中,在所述抓握位置中,所述脱开换向元件与缠绕其的抓握区段35一起部分地突出超过支撑面57。这导致在置放运动37时在所述物体贴靠在支撑面57处之前,抓握区段35与物体2到达接触中。优选地,现在在另外的方法步骤中继续置放运动37,直到本身通过提供装置3支撑的物体2贴靠在支撑面57处,其中,在所述过程中,脱开换向元件42在实施换向元件运动45时被压回到另外的抓握位置中。所述过程适宜地与附着带24的通过操纵脱开驱动机构47的同时的再张紧相组合,从而即使在随后的运行阶段中物体2与附着抓握装置4一起从提供装置3升起,脱开换向元件42也保持所述另外的抓握位置。所述运行状态在图4中示出。
如果应该将物体2放下,那么根据图5开始已经描述的脱开行为,其中,脱开换向元件42在完全从通过物体支撑机构52拦住的物体2升起的情况下被压到根据图5的脱开位置中。
附着抓握装置4能够如下地进行构造,使得脱开换向元件42能够在物体2的通过抓握区段35固定的状态中从附着带24的抓握区段35移走并且为了实施脱开行为才又被靠放到抓握区段35处。然而,优选的是所说明的结构形式,在所述结构形式中,脱开换向元件42与抓握区段35处于持续的接触中。
为了将附着抓握装置4接着准备用于新的抓握过程,脱开驱动机构47能够如下地进行操纵,使得牵引力54减小或完全被消除,从而脱开换向元件42能够与缠绕其的抓握区段35一起沿与脱开运动46相反的方向运动回到开始的抓握位置中。
就此而言在图2至5的实施例中,脱开驱动机构47是抓握装置驱动机构65的组成部分,通过所述抓握装置驱动机构,不仅能够引起用于脱开过程的运动,而且能够引起附着抓握装置4的构件的与抓握过程相关的运动。
在图2至5的实施例中抓握单元23在其具有脱开换向元件42的工作区域34中具有仅仅一个唯一的换向元件用于附着带24,抓握区段35以弯曲的纵向走向围绕所述换向元件延伸,而图6至18示出如下实施例,其中,至少一个并且优选地每个抓握单元23在其工作区域34中除了脱开换向元件42之外具有另外的换向元件66。另外的换向元件66如脱开换向元件42那样处于主平面12中,其中,所述另外的换向元件与脱开换向元件42间隔开。所述另外的换向元件和脱开换向元件42一样由附着带24部分地缠绕。由此,抓握区段35在配属的工作区域34中以尤其线性的纵向走向在脱开换向元件42与另外的换向元件66之间延伸。
另外的换向元件66能够是不能够扭转地进行构造的并且具有换向面,附着带24以其背面能够滑动移位地贴靠在所述换向面处。然而,优选的是在所说明的实施例中实现的解决方案,其中,另外的换向元件66也构造为换向滚子66a,所述换向滚子能够绕相对于主平面12成直角的转动轴线相对于承载结构14进行转动。转动轴线与换向滚子66a的纵向轴线叠合。形成另外的换向元件66的换向滚子66a适宜地不具有驱动器并且能够自由转动地进行实施。
优选地,脱开换向元件42和另外的换向元件66如下地进行构造和布置,使得在其之间延伸的抓握区段35在进一步在上面已经谈到的工作平面36中走向。优选地,全部工作区域34的具有线性的纵向走向的抓握区段35在共同的工作平面36中延伸。也就是说,其关于高度方向9处于附着抓握装置4的相同的高度上。
然而,脱开换向元件42能够实施相对于承载结构14平移的、来回的换向元件运动45,而另外的换向元件66适宜地位置固定地并且因此关于承载结构14固定地进行布置。脱开换向元件42的换向元件运动45因此根据运动方向表现为要么靠近另外的换向元件66要么远离另外的换向元件66。在此,靠近运动形成脱开运动46。
换向元件运动45示范性地是沿主方向8的线性运动。
脱开换向元件42的最大程度地靠近另外的换向元件66的位置在下面被称为脱开位置,脱开换向元件42的最大程度地远离另外的换向元件66的位置被称为抓握位置。在作为换向滚子42a的实施方案中,换向元件运动45在所有实施例中相对于换向滚子42a的转动轴线43成直角地走向。
根据未进行说明的实施例,附着抓握装置4的多个抓握单元23独立于彼此构造并且分别具有专用的附着带24。在所述独立于彼此的抓握单元23中的每个中,附着带24在两个单独地配属于相应的抓握单元23的保持区域25a、25b之间走向,其优选地以所叙述的方式装备有卷绕滚子26。以所述基础进行构建的附着抓握装置4能够例如具有多个根据图2至5描述的类型的抓握区段35。
即使抓握单元23相应于图6至18的实施例分别具有多个配属于工作区域34的换向元件42、66,多个抓握单元23的彼此独立的设计方案也是可行的。然而,与图2至5的结构原理不同,在此,在抓握过程中起作用的附着面33在量上较大一些,从而能够传递较高的保持力。
根据图6至18的实施例,每个脱开换向元件42能够位置固定地布置或构造在关于承载结构14分离的保持单元67处,其中,保持单元67相对于承载结构14是能够运动的,以便同步地产生换向元件运动45。每个保持单元67能够相对于承载结构14实施通过双箭头说明的、来回的保持单元运动68,其长度和方向直接预设处于保持单元67处的脱开换向元件42的换向元件运动45的长度和方向。
每个抓握单元23具有其专用的保持单元67,所述保持单元承载所配属的脱开换向元件42。
适宜地,每个保持单元67以实现保持单元运动68的实施的方式能够运动地支承在承载结构14处。相应的支承器件在附图中能够以72识别出并且示范性地界定线性引导部。至少一个构造在保持单元67处的支承突出部72a以沿主方向8能够移位的并且沿高度方向9被支撑的方式没入到承载结构14的支承槽72b中。在此,能够可选地实现滑动支承或滚动支承。
所述两个保持单元67沿主方向8与彼此对置,从而所述两个保持单元通过其主单元运动68沿主方向8能够靠近彼此或能够远离彼此。
示例性地,每个保持单元67包含两个沿横向方向10相对于彼此间隔开地布置的、通过合适的连接器件固定地与彼此连接的保持元件67a、67b。所述保持元件67a、67b适宜地板形地进行构造并且与平行于主平面12的板平面对齐。相应一个保持元件67a通过支承器件72支承在中间元件14b的面向前方的承载元件14a的前侧处。相应另一个保持元件47b在后方的承载元件14b的与中间元件14d对置的部分区段14b'处支承在其与前方的承载元件14a相对的背侧处。每个脱开换向元件42处于所述两个保持元件67a、67b之间并且适宜地同时保持或支承在所述两个保持元件67a、67b处。
另外的换向元件66还搭接在所述两个保持元件67a、67b之间界定的间距,然而相应地安置在中间元件14d和后方的承载元件14b的关于其对置的部分区段14b'处。
抓握装置驱动机构(其为了与图2至5的实施例的抓握装置驱动机构区分设有附图标记73)安置在承载结构14处并且如下地驱动式地与保持单元67耦联,使得所述抓握装置驱动机构能够引起所述保持单元的保持单元运动68并且因此还引起布置在保持单元67处的脱开换向元件42的换向元件运动45。
抓握装置驱动机构73优选地具有能够电操纵和/或通过流体力操纵的驱动单元74,其在该实施例中由借助压缩空气运行的气动气缸形成。驱动单元74固定在承载结构14处,示范性地在轭元件14e处的上侧18的区域中。
驱动单元74操控技术地与电子控制机构28连接,通过所述控制机构,所述驱动单元能够运行式地被操控。在流体操纵的驱动单元74中,未进一步说明的控制阀机构被接入到控制机构28与驱动单元74之间。
驱动单元74具有能够电地或通过流体力相对于承载结构14运动的从动环节75。示范性地,所述从动环节包含沿高度方向9向下方突出的、固定在活塞处的活塞杆,其中,活塞能够移位地容纳在驱动机构的气缸壳体中。为了产生从动运动82,活塞能够受控制地以压缩空气进行加载。电子的控制机构28承担操控。
从动环节75通过耦联传动机构76与所述两个保持单元67驱动式地耦联,所述耦联传动机构优选地布置在所述两个保持单元67之间的区域中。示范性地,耦联传动机构67包括两个耦联杠杆77,其分别能够摆动地一方面在铰接点83处与从动环节75连接并且另一方面与保持单元67中的一个连接。
耦联传动机构76能够直接布置在从动环节75处。然而,优选的是如下示范性的解决方案,其中,从动环节75传递力地作用于被称为控制元件78的中间元件,在所述中间元件处然后又支承有耦联传动机构76和示范性地所述两个耦联杠杆77。
控制元件78在承载结构14处沿高度方向9能够移位地进行支承。由此,所述控制元件能够直接在控制运动79时一起做从动环节75的能够通过电子控制机构28预设的、通过双箭头说明的来回的从动运动82。
在从动运动82中,耦联杠杆77的布置在控制元件78处的铰接点83向上方或下方移位,从而耦联杠杆77相应地在一端被带动并且根据在图12中的箭头80摆动。由此,所述两个保持单元67在实施保持单元运动68的情况下要么为了互相靠近向彼此移动要么为了互相远离从彼此挤走。
通过耦联传动机构76,所述两个保持单元67如下地运动式地与彼此同步,使得其为了引起所述两个脱开换向元件42的脱开运动46能够分别相对于承载结构14朝彼此运动。
在从图6至14以及17和18能够看出的运行阶段中,保持单元67在占据基础位置的情况下与彼此远离。在此,脱开换向元件42同时占据其脱开位置。图15和16示出具有在占据工作位置的情况下彼此靠近的保持单元67的运行阶段,在所述运行阶段中脱开换向元件42占据其抓握位置。
所述两个保持单元67在保持单元运动68时远离彼此,这在每个抓握单元23之内与脱开换向元件42的脱开运动46相关。脱开换向元件42从在图15中示出的抓握位置运动到从图13和14中能够看出的脱开位置中。这伴随着抓握区段35的缩短。在此,同时进行已经提到的每个抓握区段35绕配属的脱开换向元件42的环绕运动48,通过所述环绕运动,抓握区段35的缩短被补偿并且同时将抓握区段35从粘附在其处的物体2取下。
因为所述脱开行为能够通过抓握装置驱动机构73引起,因此所述抓握装置驱动机构在图6至18的实施例中还直接界定根据本发明的脱开驱动机构47。此外,抓握装置驱动机构73如所阐释的那样还能够引起脱开换向元件42的与脱开运动46相反的运动,所述运动能够实施和被实施用于抓住物体2,从而能够谈及在附图中通过箭头进行说明的抓握运动84。抓握运动84在图13和14中示出的第三运行阶段与在图15和16中说明的第四运行阶段之间过渡时发生。
与在图2至5的实施例中不同,在图6至18的实施例中,脱开运动46能够独立于附着带24产生,即通过脱开换向元件42由于其与脱开驱动机构47或与抓握装置驱动机构73的驱动式的耦联的主动的移位来产生。
在图6至18的实施例中实现的有利的设计方案中,多个抓握单元23具有共同的附着带24。示范性地,因此所述两个抓握单元23共同配属有在两个保持区域25a、25b之间走向的附着带24。所述两个抓握区段35由此具有协调的保持区域25a、25b用于所述共同的附着带24。
同一附着带24引导穿过所述两个抓握单元23的工作区域34。由此,引导穿过所述两个工作区域35的抓握区段35由同一附着带24的沿带纵向方向相对于彼此间隔开的长度区段形成。
用于附着带24的附加于脱开换向元件42和其它的换向元件66存在的不同的附加的换向元件85如下地在主平面12中布置在承载结构14处和/或在保持单元67处,使得出现适用于实施抓握过程和脱开过程的带纵向走向。附加的换向元件85尤其如下地布置,使得附着带24的在所述两个保持区域25a、25b之间延伸的长度区段的长度在保持单元运动68时不改变。由此,与环绕运动48相关的抓握区段35的长度改变能够在不改变附着带24的带张力的情况下进行。
优选地,在每个保持单元67处存在有被称为保持单元换向元件85a的附加的换向元件85,附着带24的在所述两个脱开换向元件42之间延伸的长度区段围绕所述附加的换向元件进行缠绕。在所述两个保持单元换向元件85a的情况下,以与在脱开换向元件42的情况下相同的程度在保持单元运动68期间发生互相靠近或互相远离。在互相靠近时所述两个抓握区段35的长度变大,而附着带24的被称为中间区段68的、在所述两个保持单元换向元件85a之间延伸的长度区段的长度同时减小。在相反的保持单元运动68的情况下,中间区段86的长度以与抓握区段35的长度在总和上进行缩短的相同的程度增大。通过所述长度补偿实现,附着带24将通过带运输驱动机构27预设的带张力保持为恒定。
在图6至18的实施例中,附着带24在所述两个保持区域25a、25b之间具有基本上W形的走向。在W的两个外脚的自由的端部处存在有保持区域25a、25b。在外脚到W的各内脚的过渡区域中存在有所述两个工作区域34。中间区段86配属于在W的所述两个内脚之间的过渡区域。
进一步在上面已经提到的物体支撑机构52在图6至18的实施例中如下地进行构造,使得通过其不仅能够支撑待抓住的物体2而且能够支撑被抓住的物体2。与图2至5的实施方式不同,所述物体支撑机构52具有至少一个并且优选地刚好一个能够运动的支撑元件87,其能够实施通过双箭头表明的相对于承载结构14的行程运动88,其中,运动方向适宜地沿高度方向9走向并且尤其具有与控制元件78的能够通过抓握装置驱动机构73的从动运动82引起的控制运动79相同的取向。
能够运动的支撑元件87处于所述两个工作区域34的附近,所述支撑元件在高度方向9上在下侧13的区域中前置于所述两个工作区域。在附着抓握装置4的底视图中,能够运动的支撑元件87在工作区域34旁边并且尤其围绕工作区域34延伸。共同配属于所述两个工作区域34的能够运动的支撑元件87适宜地在每个沿高度方向9与工作区域34对置的区域中具有窗口状的穿孔91,其允许所配属的抓握区段85、脱开换向元件42和另外的换向元件66的穿过抓握(Durchgriff)。
能够运动的支撑元件87在其背离抓握单元23的下侧处界定至少一个用于物体2的支撑面57。
在行程运动88的范围中,能够运动的支撑元件87能够可选地在向下方从工作区域34移开的、移出的位置87a中和在靠近工作区域34的移入的位置87b中移位。
能够运动的支撑元件87能够直接地在承载结构14处关于其能够运动地进行布置。然而,优选的是所说明的实施方式,其中,能够运动的支撑元件87沿高度方向9能够移位地支承在控制元件78处。控制元件78因此作为物体支撑机构52的组成部分起作用。
优选地,将包括一个或多个弹簧单元的弹簧机构92加入到能够运动的支撑元件87与控制元件78之间,所述弹簧机构示范性地构造为压力弹簧机构并且通过所述弹簧机构将能够运动的支撑元件87持续地预紧到移出的位置87a中。
示例性地,控制元件78具有两个配属于承载结构14的沿主方向8定向的端部区域的、尤其柱形的或棒形的在外部的控制支脚93,所述控制支脚从控制元件78的沿主方向8延伸的、配属于上侧18的连接区段94出发沿高度方向9向下方突出。外部的控制支脚93以能够移位的方式尤其在承载结构14的内部中延伸。从动环节75优选地作用于连接区段94。
能够运动的支撑元件87在每个外部的控制支脚93中借助于至少一个能够滑动移位地从下方接合的引导柱95沿高度方向9能够移位地进行支承。弹簧机构92适宜地在各外部控制支脚93与配属于所述外部控制支脚93的引导柱95之间起作用。
用于耦联传动机构76的进一步在上面提到的铰接点83适宜地布置在控制元件78的内部的控制支脚96处,所述内部的控制支脚在所述两个外部的控制支脚93之间从连接区段94出发向下方延伸进入到承载结构14中。
在控制元件78处和在引导柱95处的与彼此合作的止挡器件限制能够运动的支撑元件87关于外部的控制支脚93的移出行程。
由此,通过控制运动79不仅能够控制保持单元运动68,而且能够控制能够运动的支撑元件87的行程运动88。只要能够运动的支撑元件87不从外部被停止,其就同步地一起做控制元件78的控制运动79。
在控制运动79的范围中,控制元件78能够可选地定位在相对于承载结构14下降的、例如从图11和12中能够看出的第一控制位置中和在关于承载结构14上移的、从图15和16中能够看出的第二控制位置中。在第一控制位置中,未被加载的能够运动的支撑元件87处于移出的位置87a中,而其在控制元件78的第二控制位置中占据移入的位置87b。脱开换向元件42在第一控制位置期间处于脱开位置中并且在第二控制位置期间处于抓握位置中。
前面的实施方案示出,能够运动的支撑元件87的行程运动88通过抓握装置驱动机构73能够被影响并且尤其还能够被引起,从而抓握装置驱动机构73还作为用于能够行程运动的支撑元件87的行程驱动机构97起作用。
如果控制元件78处于第一控制位置中,那么能够运动的支撑元件87即使在不操纵控制元件78的情况下也能够被带到移入的位置87b中,方式为,所述支撑元件通过在移入意义上起作用的外部的力进行加载,所述力尤其能够通过如下方式引起,即附着抓握装置4在根据图13和14的置放运动37的范围内以提前的能够运动的支撑元件78置放到待抓住的物体2处。
示范性地,保持单元运动68和行程运动88共同通过行程驱动机构97产生。然而理解的是,为了产生所述两个运动还能够设置有与彼此分离的驱动器件。
随后,对用于在应用在图6至18中说明的附着抓握装置4的情况下重新定位物体2的优选的运行流程进行阐释。运行流程通过电子控制机构88进行控制。
在从图6至12能够看出的第一运行阶段中,待重新定位的物体2放下在提供装置3上并且附着抓握装置4借助于定位装置5有间距地放置在物体2之上。控制元件78处于第一控制位置中,从而脱开换向元件42占据脱开位置并且能够运动的支撑元件87占据移出的位置。
在随后的、从图17和18中能够看出的第二运行阶段中,附着抓握装置4在实施操纵运动7的置放运动37时下降,直到能够运动的支撑元件87到达贴靠在始终通过在此未进一步描绘的提供装置3竖直地支撑的物体2处。
在随后的第三运行阶段中,通过定位装置5继续置放运动37,其中,控制元件78始终保持在第一控制位置中。作为其结果,能够运动的支撑元件87在实施移入的行程运动88时移位到移入的位置中。由此,所述所述两个抓握区段35与处于其处的附着面33同时到达贴靠在物体2处。在此,抓握区段35能够穿过窗口状的穿孔91。
从所述第三运行阶段开始,控制元件78通过控制运动79从第一控制位置移位到从图15和15中能够看出的第二控制位置中。由此引起从图15和16中能够看出的第四运行状态。在第三运行状态到第四运行状态之间的过渡中,脱开换向元件42已经实施抓握运动84,从而附着地贴靠在物体2处的抓握区段35的长度已经增大。接触面现在无论如何是足够大的,以便能够抬起和固定物体2。
在第四运行阶段中,控制元件78相对于能够运动的支撑元件78已经向上方移位,从而弹簧机构92已经放松并且处于移入的位置87b中的能够运动的支撑元件87即使在没有从外部起作用的支撑力的情况下也保留在所述移入的位置87b中。
现在,经固定的物体2能够以未进一步说明的方式通过附着抓握装置4的任意的操纵运动7的实施在空间中进行移位。
接着,在操纵运动7的期望的目标点处,直至那时被固定的物体2从抓握区段35脱开并且放下在底座上。
所述放下的开始的过程又相应于在图15和16中的说明,仅仅具有如下区别,即在此物体2还粘附在抓握区段35处,而所述物体在之前的抓握过程中通过所说明的措施由抓握区段35抓住。
在接着的第五运行阶段中(所述第五运行阶段在图13和14中进行说明),实施上面已经详细地叙述的脱开行为。在此,附着带24从物体2取下,从而保留的、此外起粘附作用的接触面足够小,以便将物体2在接着的、从图17和18中能够看出的第六运行阶段中完全从附着带24脱开。
所述最后的脱开过程示范性地自动地通过如下方式得出,即附着抓握装置4从物体2升起。在根据图13和14的脱开行为期间,控制元件78已经被带到第一切换位置中,这已经导致,弹簧机构92已经被张紧,因为能够运动的支撑元件87通过平放在底座上的物体2进行支撑。如果现在根据图17和18将附着抓握装置4升起,那么起初仅仅承载结构14与抓握单元23一起从物体2升起,而能够运动的支撑元件87保持贴靠在物体2处,因为张紧的弹簧机构92是起作用的。在承载结构14从物体2升起时,因此发生能够运动的支撑元件87的通过弹簧机构92引起的相对于承载结构14到移出的位置87a中的行程运动88,通过所述承载结构拦住物体2。因此抓握区段35通过弹簧机构92的弹簧力从物体2被挤走和脱开。
- 用于重新定位物体的操纵装置
- 用于添加式制造三维物体的设备的操纵装置