定位手写笔笔头的方法、设备、芯片及介质
文献发布时间:2023-06-19 11:08:20
技术领域
本申请涉及终端设备技术领域,尤其涉及一种定位手写笔笔头的方法、设备、芯片及介质。
背景技术
手机和平板电脑等终端设备在人们的生活中发挥着重要的作用。其中,手写笔是这些终端设备的重要配件,它可以用来实现画图和手写输入等功能。
通常手写笔包括主动电容笔和被动电容笔。其中,主动电容笔包括电容前端芯片,该电容前端芯片可以向终端设备发送交流信号,以使终端设备根据该交流信号进行定位手写笔笔头。相反地,被动电容笔不包括电容前端芯片,被动电容笔可以被视为手指,它本身不产生交流信号,但它与电容式触摸屏接触可以改变电容式触摸屏的电容,基于此,终端设备通过电容式触摸屏上的电容变化来进行手写笔笔头的定位。然而,无论是主动电容笔还是被动电容笔,其精度并不高,从而造成终端设备进行笔头定位不准确的问题。
发明内容
本申请提供一种定位手写笔笔头的方法、设备、芯片及介质,从而提高笔头定位精度。
第一方面,本申请提供一种定位手写笔笔头的方法,方法应用于手写笔,手写笔作为终端设备的输入设备,终端设备包括处理器以及电容式触摸屏。手写笔包括电容式笔头、光电传感器以及控制器,方法包括:电容式笔头通过与电容式触摸屏配合工作,使得当电容式笔头在电容式触摸屏上移动时,处理器通过电容式触摸屏获取电容式笔头在多个时刻的多个位置,多个时刻与多个位置一一对应,多个时刻包括需要检测电容式笔头在当前位置的当前时刻,电容式笔头在当前时刻的位置为第一当前位置。控制器通过光电传感器确定与多个时刻一一对应的多个位移。控制器将多个位移发送给处理器,以使处理器根据多个位移以及多个位置确定第二当前位置,并根据第二当前位置对第一当前位置进行校准以确定电容式笔头在当前时刻的实际当前位置。
或者,
电容式笔头通过与电容式触摸屏配合工作,使得当电容式笔头在电容式触摸屏上移动时,处理器通过电容式触摸屏获取电容式笔头在多个时刻的多个位置,多个时刻与多个位置一一对应,多个时刻包括需要检测电容式笔头在当前位置的当前时刻,这些多个位置可以被称为基于电容原理的多个位置,电容式笔头在当前时刻的位置为第一当前位置。控制器通过光电传感器确定与多个时刻一一对应的多个位移,并根据多个位移确定基于光电原理的多个位置。控制器将基于光电原理的多个位置发送给处理器,以使处理器根据基于电容原理的多个位置以及基于光电原理的多个位置确定第二当前位置,并根据第二当前位置对第一当前位置进行校准以确定电容式笔头在当前时刻的实际当前位置。
或者,
手写笔作为终端设备的输入设备,终端设备包括处理器以及电容式触摸屏。手写笔包括电容式笔头、光电传感器以及控制器,方法包括:电容式笔头通过与电容式触摸屏配合工作,使得当电容式笔头在电容式触摸屏上移动时,处理器通过电容式触摸屏获取电容式笔头在多个时刻的多个位置,多个时刻与多个位置一一对应,多个时刻包括需要检测电容式笔头在当前位置的当前时刻,电容式笔头在当前时刻的位置为第一当前位置。控制器通过光电传感器确定与多个时刻一一对应的多个位移。控制器将多个位移发送给处理器,以使处理器根据多个位移以及多个位置确定第二当前位置,并将该第二当前位置作为实际当前位置。
或者,
电容式笔头通过与电容式触摸屏配合工作,使得当电容式笔头在电容式触摸屏上移动时,处理器通过电容式触摸屏获取电容式笔头在多个时刻的多个位置,多个时刻与多个位置一一对应,多个时刻包括需要检测电容式笔头在当前位置的当前时刻,这些多个位置可以被称为基于电容原理的多个位置,电容式笔头在当前时刻的位置为第一当前位置。控制器通过光电传感器确定与多个时刻一一对应的多个位移,并根据多个位移确定基于光电原理的多个位置。控制器将基于光电原理的多个位置发送给处理器,以使处理器根据基于电容原理的多个位置以及基于光电原理的多个位置确定第二当前位置,并将该第二当前位置作为实际当前位置。
即当电容式笔头在电容式触摸屏上移动时,通过终端设备与手写笔之间的配合,终端设备可以结合电容原理和光电原理对电容式笔头进行定位。由于基于光电原理的定位方式本身相对于基于电容原理的定位方式,其精度更高,但是光电传感器只能获取位移,因此本申请采用了基于电容原理和基于光电原理的结合定位技术,其相对于基于电容原理的定位方法,定位精度更高。
可选的,多个时刻的多个位置包括:第一时刻的第一位置、第二时刻的第二位置和当前时刻的第一当前位置。多个时刻一一对应的多个位移包括:第一时刻的第一位移、第二时刻的第二位移和当前时刻的第一当前位移。
可选的,手写笔还包括第一IMU,方法还包括:第一IMU获取第一IMU的z轴方向与重力加速度方向的第一夹角、第一IMU的x轴方向与重力加速度方向的第二夹角,并将第一夹角和第二夹角发送给处理器,以使处理器计算第一夹角和第三夹角的差值,以得到第五夹角,根据第五夹角,修正第一位移、第二位移和第一当前位移中至少一个位移,第一IMU的x轴方向为手写笔的长度方向,且指向远离电容式触摸屏的方向,第一IMU的x轴、y轴和z轴构成的坐标系可以为左手坐标系。
第二方面,本申请提供一种定位手写笔笔头的方法,方法应用于终端设备,终端设备包括处理器和电容式触摸屏,手写笔作为终端设备的输入设备,手写笔包括电容式笔头、光电传感器以及控制器,方法包括:当电容式笔头在终端设备的电容式触摸屏上移动时,处理器通过电容式触摸屏获取电容式笔头在多个时刻的多个位置,多个时刻与多个位置一一对应,多个时刻包括需要检测电容式笔头在当前位置的当前时刻,电容式笔头在当前时刻的位置为第一当前位置。处理器接收控制器发送的多个位移,多个位移是通过光电传感器确定的与多个时刻一一对应的多个位移。处理器根据多个位移以及多个位置确定第二当前位置,并根据第二当前位置对第一当前位置进行校准以确定电容式笔头在当前时刻的实际当前位置。
或者,
当电容式笔头在终端设备的电容式触摸屏上移动时,处理器通过电容式触摸屏获取电容式笔头在多个时刻的多个位置,多个时刻与多个位置一一对应,这些多个位置可以被称为基于电容原理的多个位置,多个时刻包括需要检测电容式笔头在当前位置的当前时刻,电容式笔头在当前时刻的位置为第一当前位置。处理器接收控制器发送的基于光电原理的多个位置。处理器根据基于电容原理的多个位置以及基于光电原理的多个位置确定第二当前位置,并根据第二当前位置对第一当前位置进行校准以确定电容式笔头在当前时刻的实际当前位置。
或者,
当电容式笔头在终端设备的电容式触摸屏上移动时,处理器通过电容式触摸屏获取电容式笔头在多个时刻的多个位置,多个时刻与多个位置一一对应,多个时刻包括需要检测电容式笔头在当前位置的当前时刻,电容式笔头在当前时刻的位置为第一当前位置。处理器接收控制器发送的多个位移,多个位移是通过光电传感器确定的与多个时刻一一对应的多个位移。处理器根据多个位移以及多个位置确定第二当前位置,并将第二当前位置作为实际当前位置。
或者,
当电容式笔头在终端设备的电容式触摸屏上移动时,处理器通过电容式触摸屏获取电容式笔头在多个时刻的多个位置,多个时刻与多个位置一一对应,这些多个位置可以被称为基于电容原理的多个位置,多个时刻包括需要检测电容式笔头在当前位置的当前时刻,电容式笔头在当前时刻的位置为第一当前位置。处理器接收控制器发送的基于光电原理的多个位置。处理器根据基于电容原理的多个位置以及基于光电原理的多个位置确定第二当前位置,并将第二当前位置作为实际当前位置。
可选的,多个时刻的多个位置包括:第一时刻的第一位置、第二时刻的第二位置和当前时刻的第一当前位置。多个时刻一一对应的多个位移包括:第一时刻的第一位移、第二时刻的第二位移和当前时刻的第一当前位移。
可选的,处理器根据多个位移以及多个位置确定第二当前位置,包括:处理器根据多个位移确定电容式笔头在第一时刻的第三位置、第二时刻的第四位置、当前时刻的第五位置。处理器确定第三位置和第四位置的第一距离、第一位置和第二位置的第二距离、第四位置与第五位置的第三距离、第三位置与第五位置的第四距离。处理器基于相似三角形原理,根据第一距离、第二距离、第三距离、第四距离、第一位置和第二位置,确定第二当前位置。基于该方法可以有效的确定第二当前位置,由于该计算过程是采用了基于电容原理和基于光电原理的结合定位技术,其相对于基于电容原理的定位方法,定位精度更高。
可选的,处理器基于相似三角形原理,根据第一距离、第二距离、第三距离、第四距离、第一位置和第二位置,确定第二当前位置,包括:
通过如下公式(1)和(2)计算第二当前位置:
其中,(X0,Y0)表示第一位置的坐标,(X1,Y1)表示第二位置的坐标,(X0b,Y0b)表示第三位置的坐标,(X1b,Y1b)表示第四位置的坐标,(X2b,Y2b)表示第五位置的坐标,(X2,Y2)表示第二当前位置,S1表示第一距离,S2表示第二距离,
可选的,根据第二当前位置对第一当前位置进行校准以确定电容式笔头在当前时刻的实际当前位置,包括:处理器计算第二当前位置的坐标与第一当前位置的坐标的平均值,以得到实际当前位置的坐标。进一步地可以提高定位精度。
可选的,终端设备还包括第二惯性测量单元IMU,方法还包括:处理器接收第一IMU发送的第一IMU的z轴方向与重力加速度方向的第一夹角、第一IMU的x轴方向与重力加速度方向的第二夹角,第一IMU的x轴方向为手写笔的长度方向,且指向远离电容式触摸屏的方向,第一IMU的x轴、y轴和z轴构成的坐标系可以是为左手坐标系;第二IMU获取第二IMU的x轴方向与重力加速度方向的第三夹角,第二IMU的z轴方向与重力加速度方向的第四夹角,并将第三夹角和第四夹角发送给处理器,第二IMU的y轴方向垂直与手写笔与电容式触摸屏的接触面,且指向手写笔的方向,第二IMU的x轴、y轴和z轴构成的坐标系为左手坐标系;处理器计算第一夹角和第三夹角的差值,以得到第五夹角,并计算第二夹角和第四夹角的差值,以得到第六夹角;处理器根据第五夹角和第六夹角,修正第一位移、第二位移和第一当前位移中的至少一个位移,得到经过修正处理后的第一修正位移、第二修正位移以及第一修正当前位移;相应的,处理器根据多个位移以及多个位置确定第二当前位置,包括:处理器根据第一修正位移、第二修正位移、第一修正当前位移以及多个位置确定第二当前位置。基于此,当手写笔的笔身相对于电容式触摸屏存在倾斜时,可以降低各个位移存在的压缩和畸变,从而提高了手写笔笔头的定位精度。
可选的,处理器根据第五夹角和第六夹角,修正第一位移、第二时刻的第二位移和第一当前位移中的至少一个位移,包括:处理器确定需要修正的位移在第一IMU的z轴方向上的第三位移;处理器确定第三位移与第五夹角的余弦值的商,得到修正后的第三位移;处理器确定需要修正的位移在第一IMU的x轴方向上的第四位移;处理器确定第四位移与第六夹角的正弦值的商,得到修正后的第四位移。
下面将介绍手写笔、终端设备、芯片、可读存储介质以及计算机程序产品,其效果可参考上述方法部分的效果,下面对此不再赘述。
第三方面,本申请提供一种手写笔,手写笔作为终端设备的输入设备,终端设备包括处理器以及电容式触摸屏。手写笔包括电容式笔头、光电传感器以及控制器。
电容式笔头用于:与电容式触摸屏配合工作,使得当电容式笔头在电容式触摸屏上移动时,处理器通过电容式触摸屏获取电容式笔头在多个时刻的多个位置,多个时刻与多个位置一一对应,多个时刻包括需要检测电容式笔头在当前位置的当前时刻,电容式笔头在当前时刻的位置为第一当前位置。
控制器用于:通过光电传感器确定与多个时刻一一对应的多个位移。将多个位移发送给处理器,以使处理器根据多个位移以及多个位置确定第二当前位置,并根据第二当前位置对第一当前位置进行校准以确定电容式笔头在当前时刻的实际当前位置。
第四方面,本申请提供一种终端设备,终端设备包括处理器和电容式触摸屏,手写笔作为终端设备的输入设备,手写笔包括电容式笔头、光电传感器以及控制器。
处理器用于:当电容式笔头在终端设备的电容式触摸屏上移动时,通过电容式触摸屏获取电容式笔头在多个时刻的多个位置,多个时刻与多个位置一一对应,多个时刻包括需要检测电容式笔头在当前位置的当前时刻,电容式笔头在当前时刻的位置为第一当前位置。接收控制器发送的多个位移,多个位移是通过光电传感器确定的与多个时刻一一对应的多个位移。根据多个位移以及多个位置确定第二当前位置,并根据第二当前位置对第一当前位置进行校准以确定电容式笔头在当前时刻的实际当前位置。
第五方面,本申请提供一种芯片,芯片用于执行如第一方面或第一方面的可选方式所述的定位手写笔笔头的方法的部分或者全部。
第六方面,本申请提供一种芯片,芯片用于执行如第二方面或第二方面的可选方式所述的定位手写笔笔头的方法的部分或者全部。
第七方面,本申请提供一种可读存储介质,包括程序指令,当程序指令在计算机上运行时,使得计算机执行如第一方面或第一方面的可选方式所述的定位手写笔笔头的方法的部分或者全部。
第八方面,本申请提供一种可读存储介质,包括程序指令,当程序指令在计算机上运行时,使得计算机执行如第二方面或第二方面的可选方式所述的定位手写笔笔头的方法的部分或者全部。
第九方面,本申请提供一种计算机程序产品,包括计算机指令,该计算机指令用来实现如第一方面或第一方面的可选方式所述的定位手写笔笔头的方法的部分或者全部。
第十方面,本申请提供一种计算机程序产品,包括计算机指令,该计算机指令用来实现如第二方面或第二方面的可选方式所述的定位手写笔笔头的方法的部分或者全部。
本申请提供一种定位手写笔笔头的方法、设备、芯片及介质,其中当电容式笔头在电容式触摸屏上移动时,通过终端设备与手写笔之间的配合,终端设备可以结合电容原理和光电原理对电容式笔头进行定位。由于基于光电原理的定位方式本身相对于基于电容原理的定位方式,其精度更高,但是光电传感器只能获取位移,因此本申请采用了基于电容原理和基于光电原理的结合定位技术,其相对于基于电容原理的定位方法,定位精度更高。另外,手写笔或者终端设备可以对电光传感器获取到的位移进行修正,从而当手写笔的笔身相对于电容式触摸屏存在倾斜时,可以降低各个位移存在的压缩和畸变,从而提高了手写笔笔头的定位精度。
附图说明
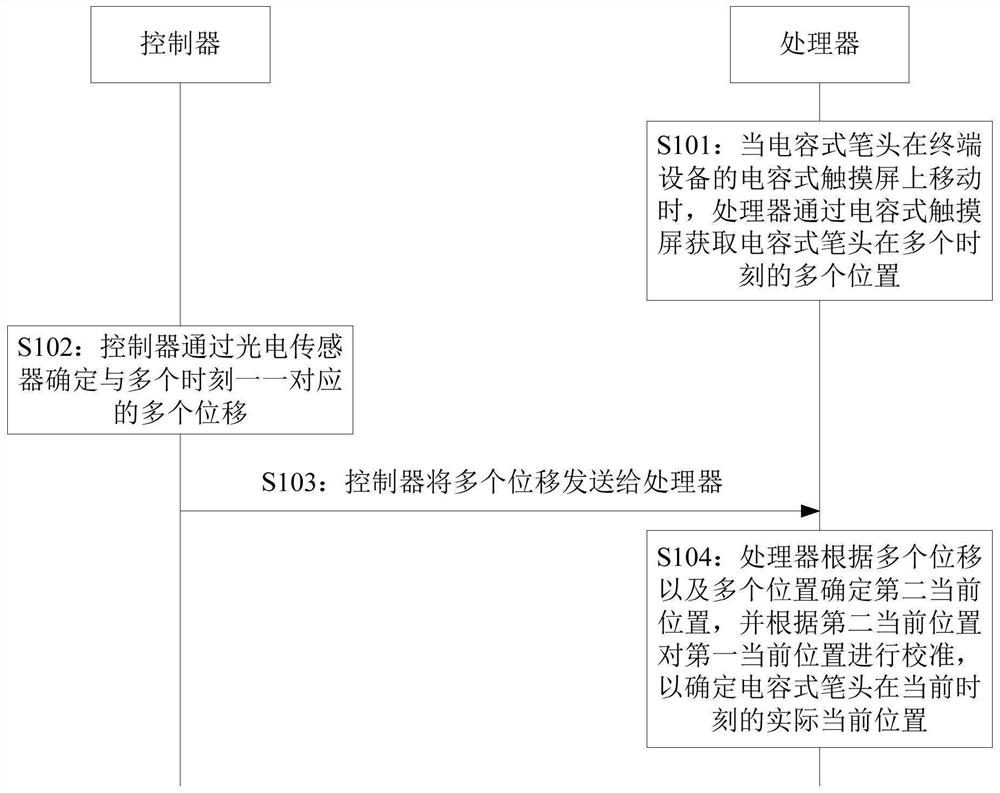
图1为本申请一实施例提供的定位手写笔笔头的方法的交互流程图;
图2为本申请一实施例提供的确定电容式笔头在当前时刻的实际当前位置的方法流程图;
图3为本申请一实施例提供的各个位置的示意图;
图4为本申请另一实施例提供的确定电容式笔头在当前时刻的实际当前位置的方法流程图;
图5为本申请一实施例提供的位移修正方法的交互流程图;
图6为本申请一实施例提供的终端设备和手写笔的位置关系示意图;
图7为本申请一实施例提供的位移修正方法的流程图;
图8为本申请一实施例提供的位移修正方法的示意图;
图9为本申请一实施例提供的一种手写笔的示意图;
图10为本申请一实施例提供的一种终端设备的示意图。
具体实施方式
如上所述,无论是主动电容笔还是被动电容笔,其精度并不高,从而造成终端设备进行笔头定位不准确的问题。本申请提供一种定位手写笔笔头的方法、设备、芯片及介质。
示例性地,本申请技术方案的应用场景为:手写笔作为手机或者平板电脑等终端设备的输入设备,该手写笔可以是主动电容笔或者被动电容笔,本申请对此不做限制。其中该手写笔可以包括电容式笔头、光电传感器以及控制器,终端设备可以包括:处理器以及电容式触摸屏。手写笔与终端设备之间可以采用无线通信方式进行通信,该无线通信方式可以是无线保真(wireless fidelity,WiFi)或者蓝牙通信方式,但不限于此。
需要说明的是,所述应用场景仅为本申请一示例性场景,本申请的应用场景不限于此。
本申请的主旨思想是:当电容式笔头在电容式触摸屏上移动时,通过终端设备与手写笔之间的配合,终端设备可以结合电容原理和光电原理对电容式笔头进行定位。
下面对本申请的技术方案进行详细描述:
图1为本申请一实施例提供的定位手写笔笔头的方法的交互流程图,示例性地,该方法涉及的网元包括:手写笔和终端设备,其中手写笔包括电容式笔头、光电传感器以及控制器,终端设备包括处理器以及电容式触摸屏。如图1所示,该方法包括如下步骤:
步骤S101:当电容式笔头在终端设备的电容式触摸屏上移动时,处理器通过电容式触摸屏获取电容式笔头在多个时刻的多个位置。
其中,本申请中的“位置”可以指的是该位置的坐标。而处理器通过电容式触摸屏获取电容式笔头在多个时刻的多个位置均是基于电容原理获得的位置,因此这种位置的精度不高。
其中,多个时刻与多个位置一一对应,多个时刻包括需要检测电容式笔头在当前位置的当前时刻,电容式笔头在当前时刻的位置为第一当前位置。例如:假设电容式笔头的实际运动轨迹是A→B→C,那么处理器通过电容式触摸屏在第一时刻获取到A点对应的位置为第一位置,在第二时刻获取到B点对应的位置为第二位置,在当前时刻获取到C点对应的位置为第一当前位置。
若手写笔是主动电容笔,则手写笔还包括电容前端芯片,并且当电容式笔头在电容式触摸屏上移动时,电容前端芯片可以向终端设备的处理器发送一个或多个交流信号,以使处理器根据上述一个或多个交流信号进行手写笔笔头的定位。其中,若手写笔向处理器发送多个交流信号,则终端设备可以根据每个交流信号确定一个位置,并对上述多个交流信号分别确定的位置的坐标求平均值,以确定最终的位置。本申请对处理器如何根据交流信号进行手写笔笔头定位,不做限制。
若手写笔是被动电容笔,电容式笔头在电容式触摸屏上移动,则手写笔本身不产生交流信号,但手写笔与电容式触摸屏的接触可以改变电容式触摸屏的电容,基于此,处理器通过电容式触摸屏上的电容变化来进行手写笔笔头的定位。其中,本申请对处理器如何通过电容式触摸屏上的电容变化来进行手写笔笔头的定位,不做限制。
步骤S102:控制器通过光电传感器确定与多个时刻一一对应的多个位移。
可选的,所谓多个时刻与多个位移一一对应指的是:控制器通过光电传感器在上述多个时刻分别获得一个位移。例如:假设电容式笔头的实际运动轨迹是A→B→C,那么控制器通过光电传感器在第一时刻获取到A点对应的位移为第一位移,在第二时刻获取到B点对应的位移为第二位移,在当前时刻获取到C点对应的位移为第一当前位移。
或者,
可选的,所谓多个时刻与多个位移一一对应指的是:控制器通过光电传感器在与上述多个时刻相近的多个时刻分别获得一个位移。例如:假设电容式笔头的实际运动轨迹是A→B→C,那么控制器通过光电传感器在第三时刻获取到A点对应的位移为第一位移,在第四时刻获取到B点对应的位移为第二位移,在第五时刻获取到C点对应的位移为第一当前位移。其中,第一时刻和第三时刻的差值、第二时刻和第四时刻的差值、当前时刻和第五时刻的差值均小于预设时间。该预设时间可以是1毫秒(millsecond,ms),2ms等。
由于位移表示物体的位置变化,即位移是一个相对概念,因此可以人为设置一个初始位置,例如:可以人为设置A点的位置为初始位置,这种情况下上述第一位移为零。当前,人为设置的初始位置也可以不是A点的位置,这种情况下上述第一位移非零。
需要说明的是,本申请对步骤S101和步骤S102的顺序不做限制。
步骤S103:控制器将多个位移发送给处理器。
步骤S104:处理器根据多个位移以及多个位置确定第二当前位置,并根据第二当前位置对第一当前位置进行校准,以确定电容式笔头在当前时刻的实际当前位置。
针对步骤S104进行如下说明:
可选方式一:图2为本申请一实施例提供的确定电容式笔头在当前时刻的实际当前位置的方法流程图,该方法涉及的网元是终端设备,具体可以是终端设备中的处理器。下面以处理器作为执行主体,对该方法进行说明,如图2所示,该方法包括如下流程:
步骤S201:处理器根据多个位移确定电容式笔头在第一时刻的第三位置、第二时刻的第四位置、当前时刻的第五位置。
步骤S202:处理器确定第三位置和第四位置的第一距离、第一位置和第二位置的第二距离、第四位置与第五位置的第三距离、第三位置与第五位置的第四距离;
步骤S203:处理器基于相似三角形原理,根据第一距离、第二距离、第三距离、第四距离、第一位置和第二位置,确定第二当前位置。
步骤S204:处理器计算第二当前位置的坐标与第一当前位置的坐标的平均值,以得到实际当前位置的坐标。
针对步骤S201至步骤S203进行说明:
假设(X0,Y0)表示第一位置的坐标,(X1,Y1)表示第二位置的坐标,(X0b,Y0b)表示第三位置的坐标,(X1b,Y1b)表示第四位置的坐标,(X2b,Y2b)表示第五位置的坐标,(X2,Y2)表示第二当前位置,S1表示第一距离,S2表示第二距离,
图3为本申请一实施例提供的各个位置的示意图,如图3所示,基于相似三角形原理,通过如下公式(1)和(2)计算电容式笔头在当前时刻的第二当前位置:
针对步骤S204进行如下说明:
处理器可以采用算术平均算法、几何平均算法或者调和平均算法等计算第二当前位置的坐标与第一当前位置的坐标的平均值,本申请对如何计算第二当前位置的坐标与第一当前位置的坐标的平均值不做限制。
可选方式二:图4为本申请另一实施例提供的确定电容式笔头在当前时刻的实际当前位置的方法流程图,该方法涉及的网元是终端设备,具体可以是终端设备中的处理器。下面以处理器作为执行主体,对该方法进行说明,如图3所示,该方法包括如下流程:
步骤S401:处理器根据多个位移确定电容式笔头在第一时刻的第三位置、当前时刻的第五位置。
步骤S402:处理器确定第二位移的大小为第一距离S1、第一位置和第二位置的第二距离S2、第一当前位移的长度为第三距离S3、第三位置与第五位置的第四距离S4。
步骤S403:处理器基于相似三角形原理,根据第一距离、第二距离、第三距离、第四距离、第一位置和第二位置,确定第二当前位置。
步骤S404:处理器计算第二当前位置的坐标与第一当前位置的坐标的平均值,以得到实际当前位置的坐标。
针对步骤S401至步骤S403进行说明:
假设处理器获取到了上述第一位移、第二位移和第一当前位移,且人为设置的初始位置为A点的位置,这种情况下,第一位移为零,因此第三位置为上述初始位置。处理器根据第二位移和第三位置可以确定上述第四位置,并根据第一当前位移和上述第四位置可以确定上述第五位置。
假设(X0,Y0)表示第一位置的坐标,(X1,Y1)表示第二位置的坐标,(X0b,Y0b)表示第三位置的坐标,(X1b,Y1b)表示第四位置的坐标,(X2b,Y2b)表示第五位置的坐标,(X2,Y2)表示第二当前位置,S1表示第一距离,S2表示第二距离,
如图3所示,基于相似三角形原理,通过如下公式(3)和(4)计算电容式笔头在当前时刻的第二当前位置:
需要说明你的是,第二种可选方式与第一种可选方式的不同之处在于,处理器可以直接将第二位移的大小确定为第一距离,将第一当前位移的大小确定为第二距离。
其中,步骤S404和步骤S204相同,其内容可参考步骤S204的解释说明。
需要说明的是,步骤S103和步骤S104还可以通过如下替换方案实现:
控制器通过光电传感器确定与多个时刻一一对应的多个位移之后,根据多个位移分别确定多个位置,并将根据多个位移确定的多个位置的坐标发送给处理器,以使处理器根据这些位置以及基于电容原理确定的多个位置确定第二当前位置。
假设控制器获取到了上述第一位移、第二位移和第一当前位移,且人为设置的初始位置为A点的位置,这种情况下,第一位移为零,因此第三位置为上述初始位置。控制器根据第二位移和第三位置可以确定上述第四位置,并根据第一当前位移和上述第四位置可以确定上述第五位置。基于此,控制器可以将第三位置、第四位置和第五位置发送给处理器,而处理器如何根据这些位置确定第二当前位置,可以参考图2对应的实施例,对此不再赘述。
针对上述步骤S104还可以通过如果替换方案实现:即处理器根据多个位移以及多个位置确定第二当前位置,并将该第二当前位置确定为电容式笔头在当前时刻的实际当前位置。
综上,本申请提供了定位手写笔笔头的方法,当电容式笔头在电容式触摸屏上移动时,通过终端设备与手写笔之间的配合,终端设备可以结合电容原理和光电原理对电容式笔头进行定位。由于基于光电原理的定位方式本身相对于基于电容原理的定位方式,其精度更高,但是光电传感器只能获取位移,因此本申请采用了基于电容原理和基于光电原理的结合定位技术,其相对于基于电容原理的定位方法,定位精度更高。
当手写笔的笔身相对于电容式触摸屏存在倾斜时,将会导致光电传感器获得的各个位移存在压缩和畸变,因此,本申请还提供了修正各个位移的方法。示例性的,图5为本申请一实施例提供的位移修正方法的交互流程图,示例性地,该方法涉及的网元包括:手写笔和终端设备,该手写笔包括:电容式笔头、光电传感器、控制器和第一惯性测量单元(inertial measurement unit,IMU)。该终端设备包括:处理器、电容式触摸屏以及第二IMU。如图5所示,针对第一位移、第二位移和第一当前位移中的至少一项,该位移修正方法包括如下步骤:
步骤S501:第一IMU获取第一IMU的z轴方向与重力加速度方向的第一夹角、第一IMU的x轴方向与重力加速度方向的第二夹角。
第一IMU的x轴方向为手写笔的长度方向,且指向远离电容式触摸屏的方向,第一IMU的x轴、y轴和z轴构成的坐标系为左手坐标系。
步骤S502:第一IMU将第一夹角和第二夹角发送给处理器。
步骤S503:第二IMU获取第二IMU的x轴方向与重力加速度方向的第三夹角,第二IMU的z轴方向与重力加速度方向的第四夹角。
第二IMU的y轴方向垂直与手写笔与电容式触摸屏的接触面,且指向手写笔的方向,第二IMU的x轴、y轴和z轴构成的坐标系为左手坐标系。
步骤S504:第二IMU将第三夹角和第四夹角发送给处理器。
步骤S505:处理器计算第一夹角和第三夹角的差值,以得到手写笔与终端设备在电容式触摸屏的宽度方向上的第五夹角,并计算第二夹角和第四夹角的差值,以得到手写笔与终端设备在电容式触摸屏的宽度方向上的第六夹角。
步骤S506:处理器根据第五夹角和第六夹角,修正第一位移、第二位移和第一当前位移中的至少一个位移,得到经过修正处理后的第一修正位移、第二修正位移以及第一修正当前位移。
需要说明的是,由于手写笔在电容式触摸屏上移动,因此上述第五夹角和第六夹角可能也在变化,那么修正第一位移、第二位移以及第一当前位移中任一项所用的第五夹角可能不尽相同,并且修正第一位移、第二位移以及第一当前位移中任一项所用的第六夹角也可能不同。
其中,第一IMU可以测量第一IMU的z轴方向与重力加速度方向(即g)的第一夹角a,第二IMU可以测量第二IMU的x轴方向与重力加速度方向的第三夹角b,终端设备的处理器获取第一夹角a和第三夹角b,并计算第一夹角a和第三夹角b的差值,以得到第五夹角a-b。
处理器还可以通过如下可选方式获取第六夹角α-β:
图6为本申请一实施例提供的终端设备和手写笔的位置关系示意图,α表示第一IMU的x轴方向与重力加速度方向的第二夹角,β表示第二IMU的z轴方向与重力加速度方向的第四夹角。第一IMU61测量得到第二夹角α。第二IMU62测量得到第四夹角β。终端设备的处理器可以获取第二夹角α和第四夹角β,并计算第二夹角α和第四夹角β的差值,以得到第六夹角α-β。
针对步骤S506进行说明:
可选的,图7为本申请一实施例提供的位移修正方法的流程图,如图7所示,上述步骤S506包括如下步骤:
步骤S701:处理器需要修正的位移在第一IMU的z轴方向上的第三位移。
步骤S702:处理器确定第三位移与第五夹角的余弦值的商,得到修正后的第三位移。
步骤S703:处理器确定需要修正的位移在第一IMU的x轴方向上的第四位移。
步骤S704:处理器确定第四位移与第六夹角的正弦值的商,得到修正后的第四位移。
其中,第三位移为ΔZ’,修改后的第三位移为ΔZ=ΔZ’/cos(a-b),假设需要修正的位移在第一IMU的z轴方向上的坐标为Zn-1,则修正后的位置在第一IMU的z轴方向的坐标Zn,则Zn=Zn-1+ΔZ。
图8为本申请一实施例提供的位移修正方法的示意图,如图8所示,第四位移为ΔX’,修正后的第四位移为ΔX=ΔX’/sin(α-β),假设需要修正的位移在第一IMU的x轴方向上的坐标为Xn-1,修正后的任一位置在手写笔的长度方向上的坐标Xn,则Xn=Xn-1+ΔX。
需要说明的是,如图7所示,由于手写笔的坐标系和终端设备的坐标系不是同一坐标系,因此,手写笔在发送第一位移、第二位移、第一当前位移中任一位移给终端设备前,需要将这些位移转换到终端设备的坐标系下,或者,将手写笔的坐标系和终端设备的坐标系转换到同一坐标系,以便终端设备根据多个位移和多个位置,确定第二当前位置。
值得一提的是,针对第一位移、第二位移和第一当前位移,手写笔或者终端设备可以对每个位移进行修正,也可以对部分进行修正,或者不对任一个位移进行修正,本申请对此不做限制。因此,第一修正位移可以与第一位移相同或者不同,同样的,第二修正位移可以与第二位移相同或者不同,第一修正当前位移可以与第一当前位移相同或者不同。处理器根据所有修改后的多个位移以及多个位置确定第二当前位置,或者,根据部分修改后的位移和其他部分未修改后的位移以及多个位置确定第二当前位置。
综上,在本申请实施例中,引入了位移修正过程。基于此,当手写笔的笔身相对于电容式触摸屏存在倾斜时,可以降低各个位移存在的压缩和畸变,从而提高了手写笔笔头的定位精度。
图9为本申请一实施例提供的一种手写笔的示意图,手写笔作为终端设备的输入设备,终端设备包括处理器以及电容式触摸屏。如图9所示,手写笔包括电容式笔头901、光电传感器902以及控制器903。
电容式笔头901用于:与电容式触摸屏配合工作,使得当电容式笔头901在电容式触摸屏上移动时,处理器通过电容式触摸屏获取电容式笔头901在多个时刻的多个位置,多个时刻与多个位置一一对应,多个时刻包括需要检测电容式笔头901在当前位置的当前时刻,电容式笔头901在当前时刻的位置为第一当前位置。
控制器903用于:通过光电传感器902确定与多个时刻一一对应的多个位移。将多个位移发送给处理器,以使处理器根据多个位移以及多个位置确定第二当前位置,并根据第二当前位置对第一当前位置进行校准以确定电容式笔头901在当前时刻的实际当前位置。
可选的,多个时刻的多个位置包括:第一时刻的第一位置、第二时刻的第二位置和当前时刻的第一当前位置。多个时刻一一对应的多个位移包括:第一时刻的第一位移、第二时刻的第二位移和当前时刻的第一当前位移。
可选的,手写笔还包括第一IMU904,用于:获取第一IMU的z轴方向与重力加速度方向的第一夹角、第一IMU的x轴方向与重力加速度方向的第二夹角,并将第一夹角和第二夹角发送给处理器,第一IMU的x轴方向为手写笔的长度方向,且指向远离电容式触摸屏的方向,第一IMU的x轴、y轴和z轴构成的坐标系为左手坐标系。
本申请提供一种手写笔,该手写笔可以执行上述手写笔侧对应的定位手写笔笔头的方法,其内容和效果可参考方法实施例部分,对此不再赘述。
图10为本申请一实施例提供的一种终端设备的示意图,如图10所示,该终端设备包括处理器1001和电容式触摸屏1002,其中手写笔作为终端设备的输入设备,手写笔包括电容式笔头、光电传感器以及控制器。
其中,处理器1001用于:当电容式笔头在终端设备的电容式触摸屏1002上移动时,通过电容式触摸屏1002获取电容式笔头在多个时刻的多个位置,多个时刻与多个位置一一对应,多个时刻包括需要检测电容式笔头在当前位置的当前时刻,电容式笔头在当前时刻的位置为第一当前位置。接收控制器发送的多个位移,多个位移是通过光电传感器确定的与多个时刻一一对应的多个位移。根据多个位移以及多个位置确定第二当前位置,并根据第二当前位置对第一当前位置进行校准以确定电容式笔头在当前时刻的实际当前位置。
可选的,多个时刻的多个位置包括:第一时刻的第一位置、第二时刻的第二位置和当前时刻的第一当前位置。多个时刻一一对应的多个位移包括:第一时刻的第一位移、第二时刻的第二位移和当前时刻的第一当前位移。
可选的,处理器1001具体用于:根据多个位移确定电容式笔头在第一时刻的第三位置、第二时刻的第四位置、当前时刻的第五位置。确定第三位置和第四位置的第一距离、第一位置和第二位置的第二距离、第四位置与第五位置的第三距离、第三位置与第五位置的第四距离。基于相似三角形原理,根据第一距离、第二距离、第三距离、第四距离、第一位置和第二位置,确定第二当前位置。
可选的,处理器1001具体通过如下公式(1)和(2)计算第二当前位置:
其中,(X0,Y0)表示第一位置的坐标,(X1,Y1)表示第二位置的坐标,(X0b,Y0b)表示第三位置的坐标,(X1b,Y1b)表示第四位置的坐标,(X2b,Y2b)表示第五位置的坐标,(X2,Y2)表示第二当前位置,S1表示第一距离,S2表示第二距离,
可选的,处理器1001具体用于:计算第二当前位置的坐标与第一当前位置的坐标的平均值,以得到实际当前位置的坐标。
可选的,终端设备还包括第二IMU1003,处理器1001还用于接收第一IMU发送的第一IMU的z轴方向与重力加速度方向的第一夹角、第一IMU的x轴方向与重力加速度方向的第二夹角,第一IMU的x轴方向为手写笔的长度方向,且指向远离电容式触摸屏的方向,第一IMU的x轴、y轴和z轴构成的坐标系为左手坐标系;第二IMU1003用于获取第二IMU1003的x轴方向与重力加速度方向的第三夹角,第二IMU1003的z轴方向与重力加速度方向的第四夹角,并将第三夹角和第四夹角发送给处理器1001,第二IMU1003的y轴方向垂直与手写笔与电容式触摸屏的接触面,且指向手写笔的方向,第二IMU1003的x轴、y轴和z轴构成的坐标系为左手坐标系;处理器1001还用于计算第一夹角和第三夹角的差值,以得到第五夹角,并计算第二夹角和第四夹角的差值,以得到第六夹角,根据第五夹角和第六夹角,修正第一位移、第二位移和第一当前位移中的至少一个位移,得到经过修正处理后的第一修正位移、第二修正位移以及第一修正当前位移;相应的,处理器1001具体用于:据第一修正位移、第二修正位移、第一修正当前位移以及多个位置确定第二当前位置。
可选的,处理器1001具体用于:确定需要修正的位移在第一IMU的z轴方向上的第三位移;确定第三位移与第五夹角的余弦值的商,得到修正后的第三位移;确定需要修正的位移在第一IMU的x轴方向上的第四位移;确定第四位移与第六夹角的正弦值的商,得到修正后的第四位移。
本申请提供一种终端设备,该终端设备可以执行上述终端设备侧对应的定位手写笔笔头的方法,其内容和效果可参考方法实施例部分,对此不再赘述。
本申请还提供一种芯片,芯片用于执行手写笔侧对应的定位手写笔笔头的方法的部分步骤或者全部步骤,其内容和效果可参考方法实施例部分,对此不再赘述。
本申请还提供一种芯片,芯片用于执行终端设备侧对应的定位手写笔笔头的方法的部分步骤或者全部步骤,其内容和效果可参考方法实施例部分,对此不再赘述。
本申请还提供一种可读存储介质,包括程序指令,当程序指令在计算机上运行时,使得计算机执行手写笔侧对应的定位手写笔笔头的方法的部分步骤或者全部步骤,其内容和效果可参考方法实施例部分,对此不再赘述。
本申请还提供一种可读存储介质,包括程序指令,当程序指令在计算机上运行时,使得计算机执行终端设备侧对应的定位手写笔笔头的方法的部分步骤或者全部步骤,其内容和效果可参考方法实施例部分,对此不再赘述。
本申请还提供一种计算机程序产品,包括计算机指令,该指令用于实现手写笔侧对应的定位手写笔笔头的方法的部分步骤或者全部步骤,其内容和效果可参考方法实施例部分,对此不再赘述。
本申请还提供一种计算机程序产品,包括计算机指令,该指令用于实现终端设备侧对应的定位手写笔笔头的方法的部分步骤或者全部步骤,其内容和效果可参考方法实施例部分,对此不再赘述。
- 定位手写笔笔头的方法、设备、芯片及介质
- 兼容多芯片定位方法、装置、设备和介质