一种电子设备和生成手部动作信息的方法
文献发布时间:2023-06-19 11:08:20
技术领域
本公开涉及人工智能领域,具体而言,涉及一种电子设备和生成手部动作信息的方法。
背景技术
虚拟现实(英文全称Virtual Reality,简称VR)技术是一种能够创建和体验虚拟世界的计算机仿真技术,它利用计算机生成一种模拟环境,使用户沉浸到该环境中。虚拟现实技术就是利用现实生活中的数据,通过诸如动作捕捉设备产生的电子信号,将其与各种输出设备结合使其转化为能够让人们感受到的现象,这些现象可以是现实中真真切切的物体,也可以是我们肉眼所看不到的计算机三维技术模拟出来的世界。
当前,通常是由动作扑捉设备将采集数据传输至外部服务器,由外部服务器对采集数据进行分析生成虚拟现实的图像,这种方法增加了外部服务器的负担。
发明内容
提供该发明内容部分以便以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。该发明内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
本公开的目的在于提供一种电子设备和生成手部动作信息的方法,能够解决上述提到的至少一个技术问题。具体方案如下:
根据本公开的具体实施方式,第一方面,本公开提供一种电子设备,包括:
承载装置,其形状与手部形状相配合,并能够配合手指运动;
动作采集装置,设置于所述承载装置,用于采集所述手部的第一动作信息;
位置采集装置,设置于所述承载装置,用于采集实际空间中所述手部的位置信息;
处理装置,设置于所述承载装置,分别与所述动作采集装置和所述位置采集装置通讯连接,用于基于接收的所述第一动作信息和所述位置信息生成实际空间中所述手部的第二动作信息。
根据本公开的具体实施方式,第二方面,本公开提供一种生成手部动作信息的方法,包括:
通过设置于承载装置的动作采集装置采集手部的第一动作信息;
通过设置于所述承载装置的位置采集装置采集实际空间中所述手部的位置信息;
基于接收的所述第一动作信息和所述位置信息生成实际空间中所述手部的第二动作信息。
本公开实施例的上述方案与现有技术相比,至少具有以下有益效果:
本公开提供了一种电子设备,包括:承载装置,其形状与手部形状相配合,并能够配合手指运动;动作采集装置,设置于所述承载装置,用于采集所述手部的第一动作信息;位置采集装置,设置于所述承载装置,用于采集实际空间中所述手部的位置信息;处理装置,设置于所述承载装置,分别与所述动作采集装置和所述位置采集装置通讯连接,用于基于接收的所述第一动作信息和所述位置信息生成实际空间中所述手部的第二动作信息。通过电子设备中的处理装置生成实际空间中所述手部的第二动作信息,降低了向外部服务器传输的数据量,减少了外部服务器处理的数据量,提高了生成虚拟现实场景的效率和显示的流畅性。
附图说明
结合附图并参考以下具体实施方式,本公开各实施例的上述和其他特征、优点及方面将变得更加明显。贯穿附图中,相同或相似的附图标记表示相同或相似的元素。应当理解附图是示意性的,元件和元素不一定按照比例绘制。在附图中:
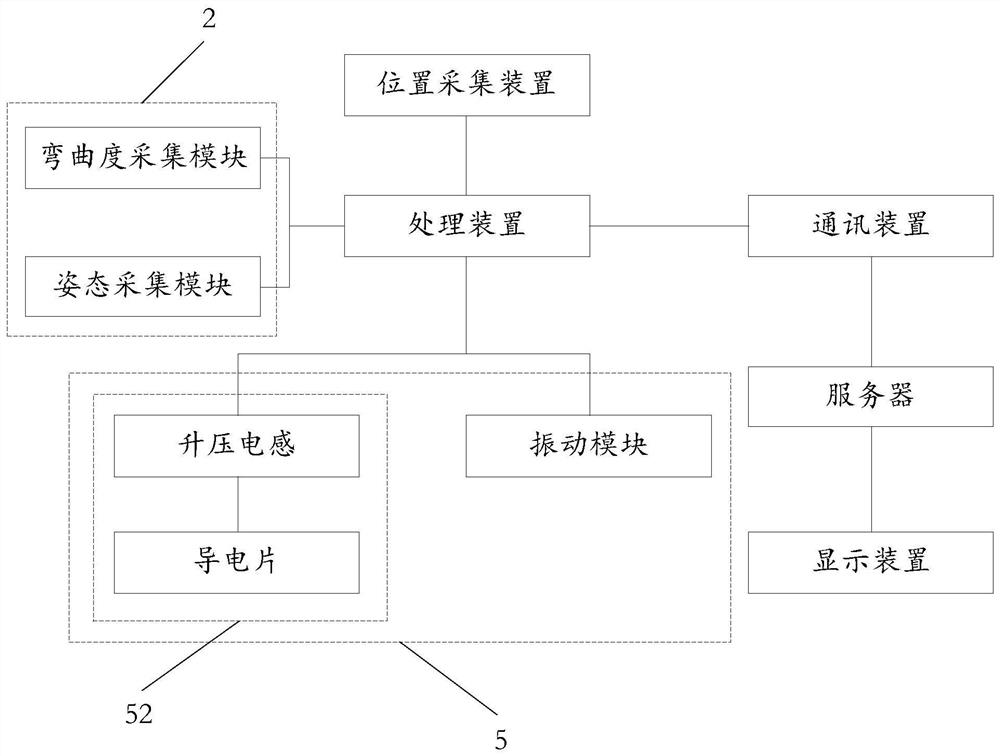
图1为本实施例提供的电子设备的结构示意图;
图2为本实施例提供的电子设备的第一示意图;
图3为本实施例提供的电子设备的第二示意图;
图4为本实施例的生成手部动作信息的方法的流程图;
附图标记说明:
1-承载装置,2-动作采集装置,3-位置采集装置,4-处理装置,5-提醒装置;
11-弹性衬布,12-固定带;
21-弯曲度采集模块,22-姿态采集模块;
51-振动模块,52-微刺激模块;
521-升压电感。
具体实施方式
下面将参照附图更详细地描述本公开的实施例。虽然附图中显示了本公开的某些实施例,然而应当理解的是,本公开可以通过各种形式来实现,而且不应该被解释为限于这里阐述的实施例,相反提供这些实施例是为了更加透彻和完整地理解本公开。应当理解的是,本公开的附图及实施例仅用于示例性作用,并非用于限制本公开的保护范围。
应当理解,本公开的方法实施方式中记载的各个步骤可以按照不同的顺序执行,和/或并行执行。此外,方法实施方式可以包括附加的步骤和/或省略执行示出的步骤。本公开的范围在此方面不受限制。
本文使用的术语“包括”及其变形是开放性包括,即“包括但不限于”。术语“基于”是“至少部分地基于”。术语“一个实施例”表示“至少一个实施例”;术语“另一实施例”表示“至少一个另外的实施例”;术语“一些实施例”表示“至少一些实施例”。其他术语的相关定义将在下文描述中给出。
需要注意,本公开中提及的“第一”、“第二”等概念仅用于对不同的装置、模块或单元进行区分,并非用于限定这些装置、模块或单元所执行的功能的顺序或者相互依存关系。
需要注意,本公开中提及的“一个”、“多个”的修饰是示意性而非限制性的,本领域技术人员应当理解,除非在上下文另有明确指出,否则应该理解为“一个或多个”。
本公开实施方式中的多个装置之间所交互的消息或者信息的名称仅用于说明性的目的,而并不是用于对这些消息或信息的范围进行限制。
下面结合附图详细说明本公开的可选实施例。
对本公开提供的第一实施例,即一种电子设备的实施例。
下面结合图1至图3对本公开实施例进行详细说明。
如图1所示,一种电子设备,至少包括:承载装置、动作采集装置、位置采集装置和处理装置。
承载装置,其形状与手部形状相配合,并能够配合手指运动。
如图3所示,所述承载装置包括弹性衬布,其设置于对应手指关节能够弯曲的部位。弹性衬布具有弹性和伸展性,承载装置通过弹性衬布能够配合手指运动。例如,手部张开、半握拳和握拳。
例如,如图2和图3所示,承载装置的形状为五指手套的形状,包括顺序拼接的腕部、掌部和指套部以及设置于腕部的固定带;在指部的关节位置拼接了弹性衬布。
动作采集装置,设置于所述承载装置,用于采集所述手部的第一动作信息。
可选的,所述第一动作信息包括手指关节的弯曲度信息和三维空间中手掌的姿态信息。
弯曲度信息包括手指在长度方向上弯曲程度的值。
姿态信息包括三维空间中手掌的形状、模样和样子。此时,三维空间坐标不等于实际空间坐标。
如图2所示,所述动作采集装置包括弯曲度采集模块和姿态采集模块。
弯曲度采集模块,设置于对应每个手指关节背部的所述承载装置,用于采集所述弯曲度信息。
例如,弯曲度采集模块包括弯曲传感器;所述弯曲传感器设置于对应每个手指关节背部的所述弹性衬布中;如果多个弯曲传感器分别与手部的各个手指相适配,跟随手指的弯曲,多个弯曲传感器能够采集对应手指的弯曲角度数据;由于弯曲传感器的成本较低,有助于降低电子设备的制作成本。
姿态采集模块,设置于对应手掌背部的所述承载装置,用于采集所述姿态信息。
例如,姿态采集模块包括姿态传感器,所述姿态传感器是一种高性能三维运动姿态测量系统,包括:陀螺仪、加速器和磁力计;姿态传感器通过内嵌的低功耗处理器得到经过温度补偿的三维姿态与方位等数据,并利用基于四元数的三维算法和特殊数据融合技术,实时输出以四元数、欧拉角表示的零漂移三维姿态方位数据;姿态传感器包括的陀螺仪、加速器和磁力计分别对手部的加速度、角速度和地磁场强度进行采集,使得姿态传感器可以实时跟随手掌姿态的变化,以准确获取手掌的姿态信息;本公开实施例通过姿态传感器采集的手部姿态信息更加准确,且减少硬件的使用。
如图2所示,位置采集装置,设置于所述承载装置,用于采集实际空间中所述手部的位置信息。
例如,位置采集装置包括HTC Vive Tracker或动作捕捉追踪器。
可选的,所述位置采集装置,设置于对应手腕部的所述承载装置的外表面。
处理装置,设置于所述承载装置,分别与所述动作采集装置和所述位置采集装置通讯连接,用于基于接收的所述第一动作信息和所述位置信息生成实际空间中所述手部的第二动作信息。
例如,处理装置包括微控制单元(英文全称Microcontroller Unit,简称MCU)。
所述动作采集装置和所述位置采集分别将采集的第一动作信息和位置信息通过通讯方式传输至处理装置。处理装置接收第一动作信息和位置信息后,生成实际空间中所述手部的第二动作信息。
如图1所示,处理装置通过通讯装置将第二动作信息传送至外部的服务器,服务器将第二动作信息与实际场景中的具体物体图像相结合生成虚拟的动作抓取图像,并将动作抓取图像显示在显示装置中。其中,通讯装置也用于接收服务器的指令。可选的,通讯装置包括无线通讯模块。通过无线通讯模块实现电子设备与外部服务器的通讯,从而摆脱了有限通讯对电子设备的束缚。无线通讯模块包括:蓝牙模块、LoRa模块或2.4G模块。采用无线通讯模块避免了有线通讯线的缠绕,使电子设备具有更大的活动空间,更具灵活性。
通过电子设备中的处理装置生成实际空间中所述手部的第二动作信息,降低了向外部服务器传输的数据量,提高了生成虚拟现实场景的效率和显示的流畅性。
如图1所示,所述电子设备还包括提醒装置。
提醒装置,设置于所述承载装置,与所述处理装置信号连接,用于基于所述处理装置的信号对所述手部进行提醒操作。
当处理装置向提醒装置发出打开信号时,提醒装置对手部进行提醒操作;当处理装置向提醒装置发出关闭信号时,提醒装置停止对手部进行提醒操作。
所述提醒装置,包括振动模块和微刺激模块。
如图2所示,振动模块,设置于贴近手腕背部的所述承载装置,用于基于所述处理装置的信号振动手腕背部。
微刺激模块,设置于贴近所述手部的所述承载装置,用于基于所述处理装置的信号对所述手部进行微刺激。
所述微刺激模块,包括:多个导电片和升压电感。
多个导电片,分别设置于贴近不同手指的所述承载装置内,且所述导电片的材质包括导电硅胶。
例如,电子设备中包括两个导电片,分别设置在所述手套的指套部对应中指和食指内部表面。
如图3所示,升压电感,与所述导电片电连接,且与所述处理装置信号连接,用于基于所述处理装置的信号控制所述导电片放电。
当处理装置向升压电感发出打开信号时,升压电感对导电片放电;当处理装置向升压电感发出关闭信号时,升压电感停止对导电片放电。
本公开实施例中振动模块和微刺激模块分别与处理装置相连接,并由处理装置控制开启或关闭,其中振动模块对操作者的手腕进行震动提醒,微刺激模块对操作者的手指进行微刺激。在人机交互过程中,结合客户的操作,可以根据软件的程序设定,对操作者进行多种方式的反馈,有助于提升用户的产品体验。另外,振动模块和微刺激模块的反馈功能,有助于应用在电力模拟实操培训、游戏、医疗康复规范等人机互动要求较高的领域。
可选的,所述电子设备还包括为所述电子设备供电的供电电源。进一步的,所述供电电源为可充电电源。
本公开实施例通过电子设备中的处理装置生成实际空间中所述手部的第二动作信息,降低了向外部服务器传输的数据量,减少了外部服务器处理的数据量,提高了生成虚拟现实场景的效率和显示的流畅性。
与本公开提供的第一实施例相对应,本公开还提供了第二实施例,即一种生成手部动作信息的方法。由于第二实施例基本与第一实施例相关联,所以描述得比较简单,相关的部分请参见第一实施例的对应说明即可。下述描述的方法实施例仅仅是示意性的。
图4示出了本公开提供的一种生成手部动作信息的方法的实施例。
如图4所示,本公开提供一种生成手部动作信息的方法,包括以下步骤:
步骤S401,通过设置于承载装置的动作采集装置采集手部的第一动作信息。
可选的,所述第一动作信息包括手指关节的弯曲度信息和三维空间中手掌的姿态信息。
进一步的,所述通过设置于承载装置的动作采集装置采集手部的第一动作信息,具体包括以下步骤:
步骤S401-1,通过所述动作采集装置采集的弯曲度采集模块采集所述弯曲度信息。
步骤S401-2,通过所述动作采集装置采集的姿态采集模块采集所述姿态信息。
步骤S402,通过设置于所述承载装置的位置采集装置采集实际空间中所述手部的位置信息。
步骤S403,基于接收的所述第一动作信息和所述位置信息生成实际空间中所述手部的第二动作信息。
本公开实施例基于接收的所述第一动作信息和所述位置信息生成实际空间中所述手部的第二动作信息,降低了向外部服务器传输的数据量,减少了外部服务器处理的数据量,提高了生成虚拟现实场景的效率和显示的流畅性。
以上描述仅为本公开的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本公开中所涉及的公开范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离上述公开构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本公开中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
此外,虽然采用特定次序描绘了各操作,但是这不应当理解为要求这些操作以所示出的特定次序或以顺序次序执行来执行。在一定环境下,多任务和并行处理可能是有利的。同样地,虽然在上面论述中包含了若干具体实现细节,但是这些不应当被解释为对本公开的范围的限制。在单独的实施例的上下文中描述的某些特征还可以组合地实现在单个实施例中。相反地,在单个实施例的上下文中描述的各种特征也可以单独地或以任何合适的子组合的方式实现在多个实施例中。
尽管已经采用特定于结构特征和/或方法逻辑动作的语言描述了本主题,但是应当理解所附权利要求书中所限定的主题未必局限于上面描述的特定特征或动作。相反,上面所描述的特定特征和动作仅仅是实现权利要求书的示例形式。
- 一种电子设备和生成手部动作信息的方法
- 标注信息的生成方法、标注信息的生成装置和电子设备