磁电式自传感流量控制阀
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及流量控制技术领域,具体地,涉及一种磁电式自传感流量控制阀,尤其涉及一种集阀门驱动与传感检测功能于一体的液压控制元件。
背景技术
随着航空航天中的微型推进系统、生物工程中的细胞滴定药物输送、深海探测等方面的发展,将新材料技术、超精密定位技术与液压技术结合,实现大行程高精密驱动是流体控制系统发展的一种趋势,因此对控制流量的液压阀的精度,以及自动化程度提出了更高的要求。当前国内大多数的控制阀的驱动元件为电磁力矩马达,存在着体积大、结构复杂、精度低等诸多不足,传统电磁控制阀仅能实现二位控制,不能连续调节,因此需要多个电磁阀开闭动作共同控制档位变换,已不能满足高速、精密控制的要求。
现有技术中对控制阀也有诸多的设计,例如专利文献CN1434217A公开了一种压电驱动式伺服阀,其中位置信号需要由外部位移传感器测量;再例如专利文献CN103032296A公开了一种基于碟型传感器阀的压电叠堆泵,在压电叠堆泵送液体的同时通过蝶形传感器测量阀的输出压力和流量。
但上述设计提出的压电阀,均只能实现单一的驱动或者传感功能,没有对这两种功能进行整合,需安装独立传感器,结构不紧凑,增加了阀体积和结构复杂程度。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种磁电式自传感流量控制阀。
根据本发明提供的一种磁电式自传感流量控制阀,包括固定框架、驱动组件、传感组件以及移动阀体,所述固定框架和移动阀体之间形成流道;
所述移动阀体上设置有阀芯,所述阀芯能够在所述驱动组件的驱使下在第一位置和第二位置之间运动进而能够调整所述流道的开度,所述传感组件由于所述运动进而能够输出相对应的检测信号,所述检测信号匹配所述开度;
其中,在第一位置时,所述流道处于关闭状态,在第二位置时,所述流道处于完全打开状态。
优选地,所述驱动组件的驱动方式能够采用电磁驱动、磁致伸缩驱动、形状记忆合金驱动、压电驱动、流体驱动、电机驱动、热膨胀驱动中的任一种形式。
优选地,所述驱动组件安装在所述固定框架上;所述驱动组件包括第一永磁体以及第一电磁线圈,所述第一电磁线圈沿所述第一永磁体的周向布置;
所述阀芯采用永磁体,所述阀芯、第一永磁体分别布置在所述流道的两侧且相对的一侧极性相吸,所述阀芯能够在第一永磁体和第一电磁线圈的驱使下在第一位置和第二位置之间运动。
优选地,当所述阀芯运动时,所述移动阀体在所述阀芯的带动下能够朝向或背离所述阀芯运动。
优选地,所述移动阀体能够在所述阀芯的带动下平动或转动。
优选地,所述传感组件包括压电体以及磁致伸缩体,所述移动阀体上设置有第二磁轭,所述压电体、磁致伸缩体依次安装在所述第二磁轭上,所述磁致伸缩体的周向设置有激励线圈;
所述固定框架上设置有第一磁轭,所述第一磁轭上安装有第二永磁体。
优选地,所述第一磁轭、第二磁轭均采用坡莫合金制作。
优选地,所述激励线圈缠绕在磁致伸缩体上并为所述磁致伸缩体提供稳定的交流磁场。
优选地,所述第二永磁体在所述第一磁轭、第二磁轭之间形成闭合磁路,所述磁致伸缩体在运动的过程中在所述闭合磁路中。
优选地,所述流道能够通入液体、气体或气液混合流体。
与现有技术相比,本发明具有如下的有益效果:
1、本发明能够利用具有精密传感功能的磁致伸缩和压电复合材料直接测量阀的输出位移及压力,无需额外的传感器,结构简单,有利于阀门的小型化设计。
2、本发明能够适于液体、气体以及气液混合物等不同介质的泵送过程中的实时监测。
3、本发明中的驱动方式能够采用电磁驱动、磁致伸缩驱动、形状记忆合金驱动、压电驱动中的任一种形式,结构形式多样,能够适用于多种应用场景,实用性强。
4、本发明传感灵敏度及测量精度高,且具有高可靠性。
5、本发明通过能够实现流速和流量的测定,实用性强。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
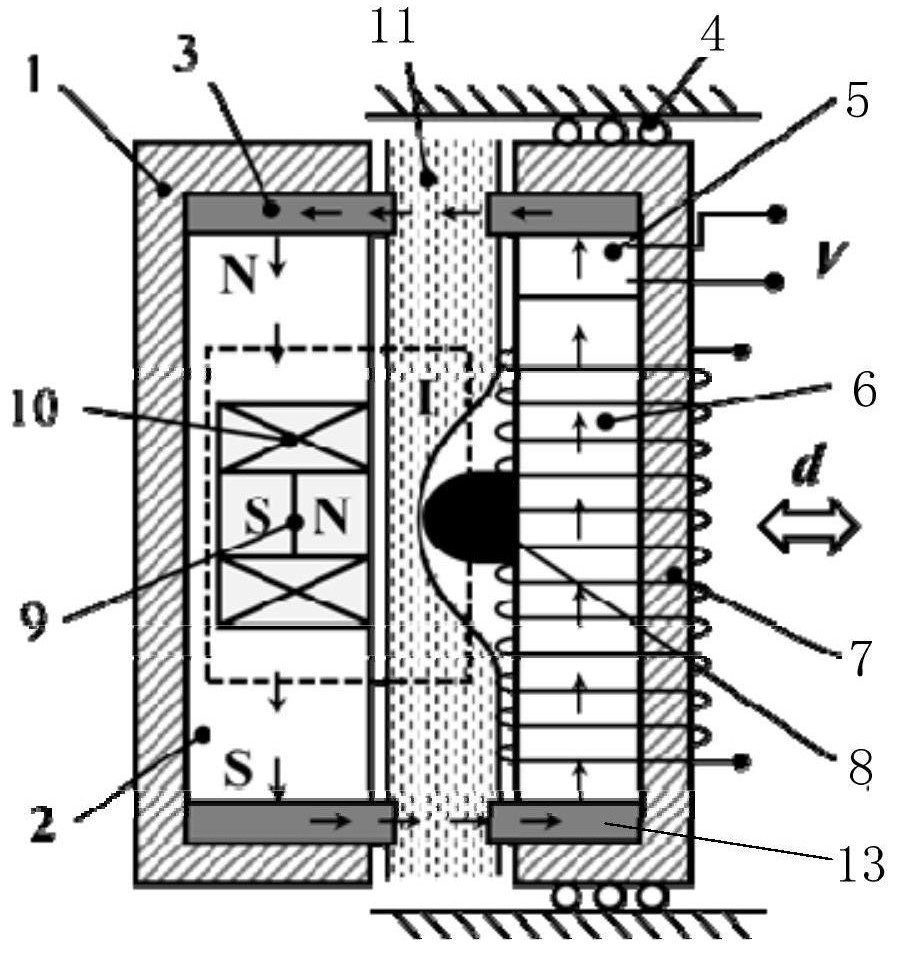
图1为本发明提供的磁电式自传感流量控制阀结构示意图。
图2为本发明提供的磁电式自传感流量控制阀电磁驱动阀芯的结构示意图。
图3为本发明提供的磁电式自传感流量控制阀磁致伸缩驱动阀芯的结构示意图。
图4为本发明提供的磁电式自传感流量控制阀形状记忆合金体驱动阀芯的结构示意图。
图5为本发明提供的磁电式自传感流量控制阀压电自传感驱动阀芯的结构示意图。
图中示出:
固定框架1 第一永磁体9
第二永磁体2 第一电磁线圈10
第一磁轭3 流道11
滑动导轨4 形状记忆合金体12
压电体5 第二磁轭13
磁致伸缩体6 第二电磁线圈14
激励线圈7 弹性体15
阀芯8 压电条16
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
实施例1:
针对现有流量控制阀存在的测量精度准确性差、占据空间大的不足,本实施例提供了一种磁电式自传感流量控制阀,包括固定框架1、驱动组件、传感组件以及移动阀体,所述固定框架1和移动阀体之间形成流道11,所述流道11既可以是由固定框架1和移动阀体由于结构设置之间产生的流道,也可以单股安装管道,当单独安装管道时,所述流道11优选采用软管,所述移动阀体上设置有阀芯8,所述阀芯8能够在所述驱动组件的驱使下在第一位置和第二位置之间运动进而能够调整所述流道11的开度,所述传感组件由于所述运动进而能够输出相对应的检测信号,所述检测信号匹配所述开度,其中,在第一位置时,所述流道11处于关闭状态,在第二位置时,所述流道11处于完全打开状态。
进一步地,所述驱动组件的驱动方式能够采用电磁驱动、磁致伸缩驱动、形状记忆合金驱动、压电驱动、流体驱动、电机驱动、热膨胀驱动中的任一种形式,流体驱动既可以是液压驱动,也可以是气缸驱动,其中,所述磁致伸缩驱动、形状记忆合金驱动、压电驱动方式则分别通过改变激励线圈电流、温度及电压量直接控制阀芯8连续移动。
本发明中所述流道11能够通入液体、气体或气液混合流体。移动阀体的移动控制软管开口截面积大小,磁电框架跟随移动阀体产生同步位移从而使通过磁电材料的磁场发生变化,在变化磁场作用下,根据磁电效应产生输出电压的变化,确定磁电框架与移动阀体位移量大小,通过标定确定阀口处流入流道11的流体速度与管壁压力,最终实现控制流量的目标。
实施例2:
本实施例为实施例1的一个优选例。
本实施例中,驱动组件采用电磁驱动的方式实现驱动,所述驱动组件安装在所述固定框架1上,如图1、图2所示,所述驱动组件包括第一永磁体9以及第一电磁线圈10,所述第一电磁线圈10沿所述第一永磁体9的周向布置,所述阀芯8采用永磁体,所述阀芯8、第一永磁体9分别布置在所述流道11的两侧且相对的一侧极性相吸,所述阀芯8能够在第一永磁体9和第一电磁线圈10的驱使下在第一位置和第二位置之间运动。
进一步地,当所述阀芯8运动时,所述移动阀体在所述阀芯8的带动下能够朝向或背离所述阀芯8运动。本实施例中,所述移动阀体能够在所述阀芯8的带动下通过平动或转动的方式实现运动,其中平动可以是滚动,也可以是滑动,例如,移动阀体的两端设置的滑动导轨4,移动阀体通过两端设置的滑动导轨4实现滑动,再例如,移动阀体的两端设置滚轮,通过滚动实现往复运动。
移动阀体内还设置有复合磁电结构,所述第二永磁体2在所述第一磁轭3、第二磁轭13之间形成闭合磁路,所述磁致伸缩体6在跟随所述阀芯8运动的过程中在所述闭合磁路中。复合磁电结构包括压电体5、磁致伸缩体6及激励线圈7,所述激励线圈7缠绕在磁致伸缩体6上并为所述磁致伸缩体6提供稳定的交流磁场,激励线圈7产生磁场使磁致伸缩体6产生应力及应变,通过机械耦合作用在压电体5上,使压电体5产生电压信号。
进一步地,当移动阀体在驱动组件的驱使下位移时,固定框架1与阀芯8之间相对位置也随之变化,从而作用在磁致伸缩体6上的磁场发生变化,进而产生与待检测位移量有关的磁致伸缩应变,最终在压电体5上由于压电效应产生与待检测量位移d有关的电压信号,实现传感检测功能。
所述移动阀体通过挤压软管的形式控制软管截面积的大小,进而达到控制流量的目的,第一永磁体9为移动阀体提供永磁吸力,第一电磁线圈10控制移动阀体的机械运动。所述可移动阀体的往复挤压软管的过程中,都伴随着软管横截面积的变化,对应流量阀的开启状态、可移动磁电框架内的压电片上伴随有电压信号生成,实现传感器的功能;当输入流体压力一定的情况下,阀体处于不同位置时,阀口处流入软管的流体速度与管壁压力与产生的电压值具有一定的比例关系、通过标定可以用输出电压信号计算流入软管的流量及软管侧壁处压力值。
具体地,所述传感组件包括压电体5以及磁致伸缩体6,所述移动阀体上设置有第二磁轭13,所述压电体5、磁致伸缩体6依次安装在所述第二磁轭13上,所述磁致伸缩体6的周向设置有激励线圈7,所述激励线圈7缠绕在磁致伸缩体6上,激励线圈7通入电流,为第二磁轭13内的磁致伸缩体6提供稳定的交流磁场,所述固定框架1上设置有第一磁轭3,所述第一磁轭3上安装有第二永磁体2,所述第一磁轭3、第二磁轭13均优选采用坡莫合金制作。
实施例3:
本实施例为实施例1的一个变化例。
本实施例中,驱动组件采用磁致伸缩驱动,如图3所示,所述阀芯8采用磁致伸缩材料制作,所述阀芯8的周向设置有第二电磁线圈14,当所述第二电磁线圈14的通电电流改变时能够改变阀芯8周围的磁场,进而能够驱使磁致伸缩材料制作的阀芯8的伸长或缩短从而能够使阀芯8在第一位置和第二位置之间运动,实现阀芯8的驱动,进而实现控制阀开关控制,同时,第二电磁线圈14中通入电流的大小决定了阀芯8变形的程度,因此通过检测第二电磁线圈14中的电流也能获得阀芯8移动位移的传感。
实施例4:
本实施例为实施例1的又一个变化例。
本实施例中,驱动组件采用形状记忆合金体驱动,如图4所示,所述驱动组件采用形状记忆合金体12,所述形状记忆合金体12的端部连接所述阀芯8,当改变形状记忆合金体12的温度时能够伸长或缩短进而能够驱使所述阀芯8在第一位置和第二位置之间运动,实现控制阀开关控制,其中,由于形状记忆合金体12的形变,电阻值发生变化,通过检测形状记忆合金体12的电阻值变化,可实现移动阀体位移的传感。
实施例5:
本实施例为实施例1的再一个变化例。
本实施例中,驱动组件采用压电材料驱动,如图5所示,所述驱动组件包括弹性体15以及设置在弹性体15两侧的第一压电链17、第二压电链18,所述第一压电链17、第二压电链18的两端均连接所述弹性体15的两端,第一压电链17、第二压电链18上均设置有多个依次连接的压电条16,其中,第一压电链17的中部固定,第二压电链18的中部连接阀芯8,当同时控制电压作用在第一压电链17、第二压电链18上的压电条16上时,压电条16伸长进而使第一压电链17、第二压电链18均伸长,弹性体15在两个压电链的驱使下同步形变进而使阀芯8运动实现控制阀开关控制,同时,通入电压的大小与阀芯8位移的大小存在一一对应的匹配关系,因此通过检测作用电压的大小也能够实现阀芯8位移的传感。
以实施例2为例,本发明的工作原理如下:
如图1所示,固定框架1与移动阀体之间存在一定间隙,固定框架1为移动阀体内复合磁电结构(压电体5和磁致伸缩体6)上施加一个偏置磁场。
所述传感组件通过第二永磁体2、第一磁轭3、第二磁轭13构成闭合磁路,图1中黑色实现箭头表示的是闭合磁路。第二永磁体2、第一磁轭3主要作用为移动阀体上的复合磁电结构施加一个偏置磁场,所述压电体5和磁致伸缩体6依次布置于可移动的移动阀体上,当移动阀体产生位移d的运动时,固定框架1与移动阀体之间相对位置随之变化,磁致伸缩体6靠近第二永磁体2运动,从而第二永磁体2作用在磁致伸缩体6上的磁场发生变化,当移动阀体运动时,磁致伸缩体6由于周围磁场的变化进而产生与待检测位移量有关的磁致伸缩应变,导致伸长或缩短,由于压电效应压电体5产生与待检测量位移d有关的电压信号,最终在压电片上产生待检测的电压信号V,实现传感功能。
所述驱动组件中第一永磁体9为阀芯8提供永磁吸力,第一电磁线圈10控制阀芯8的机械运动。工作时,当第一电磁线圈10无电流通过的状态下,阀芯8被第一永磁体9吸引至同一侧,阀门处于关闭状态;当第一电磁线圈10通电的状态下,第一电磁线圈10产生与第一永磁体9方向相反的磁场从而控制阀芯8的移动,实现驱动功能。
在本申请的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
- 磁电式自传感流量控制阀
- 一种汽车顶读式ABS磁电式轮速传感器