袋状致动器系统、使用该系统的把持装置以及机械手及其使用方法
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及驱动袋状致动器的袋状致动器系统、使用该系统的把持装 置、具备该把持装置的机械手、以及该机械手的使用方法。
背景技术
袋状致动器和使用袋状致动器来把持工件的把持装置、以及通过袋状 致动器和把持装置进行的工件把持方法是已知的(参照日本特开 2011-230260号公报、日本特开2014-8583号公报)。例如,日本特开 2011-230260号公报中的袋状致动器(接触部6)设置于各爪部4、5中用 来夹持工件50的夹持部4b、5b,成为与工件50接触(抵接、触接)的接 触部6,具备由弹性材料构成的内袋11和填充于该内袋11的粒状物12。 该袋状致动器(接触部6)通过使内袋11内减压而使粒状物12保持为任 意形态并使其硬化,由此使接触部6形成适于工件50的形态。然后,经由 该接触部6,通过爪部4、5的夹持部4b、5b夹住并把持工件50(参照日 本特开2011-230260号公报的摘要、段落0057~0074、图15、17)。
如此,袋状致动器(接触部6)通过将以内袋11内作为大气压、使粒 状物12能够流动的状态、和对内袋11内减压而使粒状物12保持为任意形 态并使其硬化的状态分开使用,来进行工件50的把持。
发明内容
然而,除了使用袋状致动器,使其根据所把持的工件的形态变形后, 对内袋内减压而使袋状致动器硬化的情况,还存在使用袋状致动器弹性地 挤压工件或使工件移动的情况。
本发明是鉴于上述问题而提出的,提供一种能够实现袋状致动器的 “可弹性变形的状态/柔软且易非弹性变形的状态/坚硬且难以变形的状态” 这三种状态的袋状致动器系统。此外,本发明还提供使用了该袋状致动器 系统的把持装置、具备该把持装置的机械手、以及该机械手的使用方法。
(1)为了解决上述问题,本发明的一个方案涉及一种袋状致动器系统, 具备:袋状致动器,其具有由具有挠性的皮膜材料构成的气密性袋部件、 和填充于所述袋部件内的可流动粒状物;与所述袋状致动器的所述袋部件 内连通的袋部件连通配管;与气压低于外部空气的低气压源连通的低气压 源连通配管;与气压高于所述外部空气的高气压源连通的高气压源连通配 管;切换机构,其进行切换从而使所述袋状致动器的所述袋部件内通过所述袋部件连通配管与所述外部空气、所述低气压源连通配管以及所述高气 压源连通配管的任一个连通;以及,切换控制部,其控制所述切换机构中 的连通目标的切换。
在该袋状致动器系统中,能够进行切换从而使内部填充了粒状物的袋 部件内通过袋部件连通配管与外部空气、低气压源连通配管、高气压源连 通配管的任一个连通。
其中,在袋部件内通过袋部件连通配管与外部空气连通的情况下,当 对袋状致动器(袋部件)施力,比如工件与其接触等时,袋部件容易发生 变形,该袋部件内填充的粒状物产生流动,因此能够容易地使袋状致动器 整体变形。
而在袋部件内通过袋部件连通配管与低气压源连通配管连通的情况 下,袋部件内由与低气压源连通配管连通的低气压源减压,且袋部件被袋 部件外的大气压挤压。由此,袋部件内填充的粒状物被压缩,粒状物彼此 相互贴合而变得难以流动,所以袋状致动器很难发生变形。
另外,在袋部件内通过袋部件连通配管与高气压源连通配管连通的情 况下,袋部件由与高气压源连通配管连通的高气压源从内测加压而像气球 一样膨胀起来,所以能够弹性地挤压所接触的工件等、或者由来自袋状致 动器(袋部件)的挤压力使所接触的工件等移动。或者,能够弹性地把持 工件。
即,本申请的袋状致动器系统,是能够实现袋状致动器的“可弹性变 形的状态(与高气压源连通配管连通时)/柔软且易非弹性变形的状态(与 外部空气连通时)/坚硬且难以变形的状态(与低气压源连通配管连通时)” 这三种状态的系统。
该袋状致动器系统可以采用多种使用方法,例如可以采用如下方式来 使用。即,在使袋部件内与外部空气连通的状态下,使袋状致动器与工件 等接触时,能够使袋状致动器容易地变形为模仿所接触的工件等的形状的 形态。
由此,当处于袋部件内与外部空气连通的状态时,使该袋状致动器与 工件等接触而使得袋状致动器成为模仿工件等的形态。之后,在控制切换 机构,将袋部件内与低气压源连通配管连通而减压的情况下,能够使得袋 状致动器保持模仿所接触的工件等的形状的形态,成为难以变形的状态。 因此,例如,在使用了该袋状致动器的把持装置中,可以使用变形成了模 仿工件等的形状的形态的袋状致动器来适当地把持工件等。
此外,当处于袋部件内与外部空气连通的状态时,使该袋状致动器与 工件等接触而使得袋状致动器成为模仿工件等的形态。之后,控制切换机 构,将袋部件内与高气压源连通配管连通而加压。这种情况下,能够通过 袋状致动器弹性地挤压与其接触的工件等。或者能够通过袋状致动器弹性 地挤压与其接触的工件等而使其移动。因此,例如,在使用了该袋状致动 器的把持装置中,可以弹性地挤压工件等并同时把持工件等,或者挤压与袋状致动器接触的工件等而使其移动。
袋状致动器中,作为构成气密性袋部件的具有挠性的皮膜材料,可举 出例如,具有弹性和气密性的橡胶材料,聚乙烯、聚丙烯、聚酰胺、聚酰 亚胺、聚四氟乙烯等合成树脂制成的薄膜,合成树脂薄膜与铝箔等金属薄 膜的复合材料等,其中,所述具有弹性和气密性的橡胶材料可举出例如天 然橡胶、及丁苯橡胶、丁腈橡胶、氟橡胶、硅橡胶等合成橡胶。
另外,作为填充于袋部件内的可流动粒状物,可举出沙子、盐粒子、 糖粒子、氧化铝粒子、二氧化硅粒子等陶瓷粒子、玻璃粒子、合成树脂粒 子(颗粒)、苯乙烯泡沫粒子等发泡树脂粒子、金属粒子(例如铁粒子、铝 粒子、铜粒子等)等及其混合物。
此外,袋状致动器可构成为使袋部件与工件直接接触,但与特开 2011-230260号公报等同样,也可构成为在袋部件的外部覆盖有作为外皮 的外袋部件。
作为低气压源,只要是能够通过低气压源连通配管对袋状致动器的袋 部件内减压使其低于外部空气(大气压)的机构即可,例如可举出真空泵、 连接于真空泵的真空罐。
作为高气压源,只要是能够通过高气压源连通配管对袋状致动器的袋 部件内加压使其高于外部空气(大气压)的机构即可,例如,压缩机、具 备高压储气罐的压缩机、连接于压缩机的高压储气罐、工厂空气配管、压 缩空气瓶或氮气气瓶等高压气瓶等。根据高气压源中气体的气压,可以在 高气压源连通配管中介入压力调节器(调压器)等调压部件。
进而,切换机构构成为可通过控制进行切换,使得袋部件连通配管与 低气压源连通配管、高气压源连通配管、外部空气中的任一个连通,可举 出例如分别与低气压源连通配管、高气压源连通配管、外部空气以及袋部 件连通配管连接的四向切换电磁阀。此外,也可以使用多个切换电磁阀来 进行控制,使得袋部件连通配管与低气压源连通配管、高气压源连通配管、 外部空气中的任一个连通。
(2)本发明的其他方案涉及具备把持机构的把持装置,所述把持机构 具有多个把持部件,通过所述多个把持部件中的至少任一个的移动来把持 工件,其中,该把持装置具有至少一个(1)所述的袋状致动器系统,所述 多个把持部件分别具有与所述工件接触而把持所述工件的接触把持部,多 个所述接触把持部中的至少任一个使用由所述袋状致动器系统的所述袋状 致动器构成的袋状致动器系统。
该把持装置中,把持机构的多个接触把持部中的至少任一个由袋状致 动器系统的袋状致动器构成。另外,如上所述,在袋状致动器系统中能够 实现袋状致动器的三种状态,即“可弹性变形的状态(与高气压源连通配管 连通时)/柔软且易非弹性变形的状态(与外部空气连通时)/坚硬且难以 变形的状态(与低气压源连通配管连通时)”。
因此,该把持装置中,能够从“可弹性变形的状态/柔软且易非弹性变 形的状态/坚硬且难以变形的状态”这三种状态中进行选择而使由袋状致动 器构成的接触把持部与所把持的工件接触,能够提高多个把持部件的接触 把持部彼此所进行的工件把持状态的自由度,实现更适当的工件把持。
此外,当处于袋部件内与外部空气连通的状态时,使该袋状致动器与 工件接触而成为模仿工件的形态,之后,通过控制切换机构,使袋部件内 减压,能够使用变形为了模仿工件形状的形态的、难变形的接触把持部(袋 状致动器),紧紧地(使工件的被把持姿势很难变动地)把持工件。
或者,当处于袋部件内与外部空气连通的状态时,使该袋状致动器与 工件等接触而成为模仿工件等的形态。之后,控制切换机构,使袋部件内 与高气压源连通配管连通而加压并使其膨胀。这种情况下,能够通过袋状 致动器(袋部件)弹性地挤压与其接触的工件。或者能够弹性地挤压与袋 状致动器接触的工件而使其移动。因此,在该把持装置中,能够通过接触 把持部(袋状致动器)弹性地挤压工件并软把持(使工件的被把持姿势很 难变动地把持)工件,或者挤压与接触把持部(袋状致动器)接触的工件 而使其移动。
(3)还可以涉及使用(2)所述的袋状致动器系统的把持装置,其中, 该把持装置具有数量大于等于所述把持部件的所述袋状致动器系统,多个 所述把持部件的所述接触把持部中的任一个分别使用由所述袋状致动器系 统的所述袋状致动器构成的袋状致动器系统。
该把持装置中,多个接触把持部中的任一个由袋状致动器系统的袋状 致动器构成。因此,在任一个接触把持部中都可以选择上述三种状态,进 而能够提高由把持部件进行的工件把持状态的自由度,实现更适当的把持。
(4)本发明的其他方案还涉及使用具备把持机构的袋状致动器系统的 把持装置,所述把持机构具有多个把持部件,通过所述多个把持部件中的 至少任一个的移动来把持工件,其中,该把持装置具有多个(1)所述的袋 状致动器系统,所述多个把持部件分别具有与所述工件接触而把持所述工 件的接触把持部,所述多个把持部件中的至少任一个所述把持部件的所述 接触把持部和基端侧接触部分别使用由所述袋状致动器系统的所述袋状致 动器构成的袋状致动器系统,所述基端侧接触部位于比所述接触把持部更 靠近基端侧的位置,并从所述把持部件的基端侧接触所述工件。
该把持装置中,把持机构的多个把持部件中的至少任一个具有由袋状 致动器系统的袋状致动器分别构成的接触把持部和基端侧接触部。如上所 述,袋状致动器系统能够实现袋状致动器的三种状态,即“可弹性变形的状 态(与高气压源连通配管连通时)/柔软且易非弹性变形的状态(与外部空 气连通时)/坚硬且难以变形的状态(与低气压源连通配管连通时)”。
因此,该把持装置中,能够在从“可弹性变形的接触状态/柔软且易非 弹性变形的接触状态/坚硬且难以变形的接触状态”这三个阶段选出的接触 状态下使由袋状致动器构成的接触把持部接触所把持的工件,能够提高多 个把持部件的接触把持部彼此所进行的工件把持状态的自由度,实现更适 当的工件把持。
此外,该把持装置中,至少任一个把持部件除了具有由袋状致动器构 成的接触把持部之外,还具有基端侧接触部,所述基端侧接触部由袋状致 动器构成,且位于比接触把持部更靠近基端侧的位置,从把持部件的基端 侧接触工件。因此,通过使基端侧接触部(袋状致动器)成为所述三种状 态中的任何一种,能够进一步提高工件的把持状态的自由度,实现更适当 的工件把持。
另外,该把持装置中,由于至少任一个把持部件所具有的基端侧接触 部从把持部件的基端侧接触工件,因此,在使形成该基端侧接触部的袋状 致动器的袋部件内与外部空气连通的状态下,使该基端侧接触部(袋状致 动器)与工件等接触而形成模仿工件等的形态。之后,控制切换机构,使 袋部件内与高气压源连通配管连通而加压使其膨胀,从而也能够在基端侧 接触部弹性地挤压与该基端侧接触部接触的工件,或者挤压工件而使其移动。
(5)进而,还可以涉及使用上述袋状致动器系统的把持装置,其中, 该把持装置具有数量为所述把持部件的两倍以上的所述袋状致动器系统, 多个所述把持部件的所述接触把持部及所述基端侧接触部的任一个分别使 用由所述袋状致动器系统的所述袋状致动器构成的袋状致动器系统。
该把持装置中,多个把持部件中的任一个具有形成袋状致动器的接触 把持部和基端侧接触部。
因此,该把持装置中,对要把持的工件使用由袋状致动器构成的接触 把持部和基端侧接触部,能够进一步提高工件把持状态的自由度,实现更 适当的工件把持。
(6)本发明的其他方案还涉及机械手,其具备:机械手主体;使用(2) 或(3)所述的袋状致动器的把持装置的所述把持机构,该把持机构配置于 所述机械手主体的前端部;以及检测施加于所述把持机构的外力的力传感 器。
由于该机械手具备力传感器,因此,当对工件执行预定的处理,即通 过把持机构把持工件并通过机械手主体使其移动而插入被插入部件的插入 孔内等处理时,能够经由把持机构,由力传感器检测施加于多个把持部件 所把持的工件的外力。因此,当由于工件的把持姿势不当,在执行向插入 孔插入的处理的过程中对工件施加了异常外力时,能够进行工件的异常处 理,比如停止处理动作等。
(7)(6)中所述的机械手还可以设置为:所述力传感器是配置与所 述机械手主体和所述把持机构之间的六轴力传感器。
由于该机械手具备六轴力传感器来作为力传感器,因此,对工件实施 预定的处理时,能够经由工件等将施加于把持机构的外力分解到各轴,从 而更准确地检测外力。
另外,六轴力传感器是配置于机械手主体和把持机构之间,能检测作 为平移方向的X、Y、Z这三个方向的平移力、和作为绕各轴旋转的旋转 方向的Rx、Ry、Rz这三个方向的力矩的传感器。
(8)本发明的另外的方案进一步涉及机械手,其具备:机械手主体; (4)或(5)所述的使用袋状致动器的把持装置的所述把持机构,该把持 机构配置于所述机械手主体的前端部;以及检测施加于所述把持机构的多 个所述把持部件的外力的力传感器。
由于该机械手也具备力传感器,因此,当通过把持机构把持工件并通 过机械手主体使其移动而对工件实施预定的处理时,能够经由把持装置, 由力传感器检测施加于多个把持部件所把持的工件的外力。因此,在由于 工件的把持姿势不当,对工件施加了异常外力的情况下,能够适当地检测 出工件的处理异常,比如可以停止处理动作等。
而且,由于该机械手中,把持机构的把持部件的接触把持部由袋状致 动器构成,因此,能够根据上述三种接触状态灵活进行工件处理。而且, 由于该机械手中,在至少任一个把持部件具有由袋状致动器构成的基端侧 接触部,因此,在基端侧接触部也能够通过区分上述三种接触状态,进一 步对工件进行灵活处理,比如使工件回动等。
(9)(8)中所述的机械手还可以设置为:所述力传感器是配置与所 述机械手主体和所述把持机构之间的六轴力传感器。
由于该机械手也具备六轴力传感器来作为力传感器,因此,对工件实 施预定的处理时,能够将施加于所把持的工件的外力分解到六轴来进行检 测。由此,当由于工件的把持姿势不当,在处理过程中检测到施加于工件 的异常外力等时,能够更适当地检测外力,从而更适当地应对。
(10)本发明的其他方案涉及(6)或(7)所述的机械手的使用方法, 其中,具备:把持步骤,通过所述把持机构的所述多个把持部件之中各自 的所述接触把持部把持所述工件;插入步骤,将把持住的所述工件插入被 插入工件的插入孔;释放步骤,对插入了所述插入孔的所述工件,释放由 所述多个把持部件进行的把持,所述插入步骤具有:移动步骤,通过力传 感器检测经由所述工件施加于所述把持机构的外力,同时沿着所述被插入 工件的所述插入孔的孔轴线,使把持了所述工件的把持机构朝向所述插入 孔移动;异常外力监视步骤,在所述移动步骤中,监视所述外力之中的、 方向不同于与所述把持机构的行进方向反向的行进方向外力的异常外力是 否变得大于预先设定的异常外力阈值;移动停止步骤,在所述异常外力变 得大于所述异常外力阈值的情况下,暂时停止通过所述移动步骤进行的移 动;姿势变更步骤,通过所述移动停止步骤停止了移动之后,使构成与所 述工件接触的所述接触把持部的所述袋状致动器中的至少一个所述袋状致 动器的所述袋部件内通过所述袋部件连通配管与所述高气压源连通配管连 通,并使该袋部件膨胀,由此,当重新开始了朝向所述行进方向的移动时, 变更所述工件的姿势,以使得经由所述工件施加于所述把持机构的重新开 始后的异常外力小于停止前的异常外力;再把持步骤,由多个所述把持部 件再次把持所述工件;以及,重新开始步骤,使暂时停止了的朝向所述行 进方向的移动重新开始。
通过该机械手的使用方法,即使在由于工件的把持姿势不当,处理过 程中对工件施加了异常外力的情况下,也能够通过变更工件的把持姿势, 将工件适当地插入被插入工件的插入孔,从而能够减少无法插入的情况。
(11)或者,本发明的其他方案涉及(8)或(9)所述的机械手的使 用方法,其中,具备:把持步骤,通过所述把持机构的所述多个把持部件 之中各自的所述接触把持部把持所述工件;插入步骤,将把持住的所述工 件插入被插入工件的插入孔;释放步骤,对插入了所述插入孔的所述工件, 释放由所述多个把持部件进行的把持,所述插入步骤具有:移动步骤,通 过力传感器检测经由所述工件施加于所述把持机构的外力,同时沿着所述 被插入工件的所述插入孔的孔轴线,使把持住所述工件的把持机构朝向所 述插入孔移动;异常外力监视步骤,在所述移动步骤中,监视所述外力之 中的、方向不同于与所述把持机构的行进方向反向的行进方向外力的异常 外力是否变得大于预先设定的异常外力阈值;移动停止步骤,在所述异常 外力变得大于所述异常外力阈值的情况下,暂时停止通过所述移动步骤进 行的移动;姿势变更步骤,通过所述移动停止步骤停止了移动之后,使构 成与所述工件接触的所述接触把持部或所述基端侧接触部的所述袋状致动 器中的至少一个所述袋状致动器的所述袋部件内通过所述袋部件连通配管 与所述高气压源连通配管连通,并使该袋部件膨胀,由此,当重新开始了 朝向所述行进方向的移动时,变更所述工件的姿势,以使得经由所述工件 施加于所述把持机构的重新开始后的异常外力小于停止前的异常外力;再 把持步骤,由多个所述把持部件再次把持所述工件;以及,重新开始步骤, 使暂时停止了的朝向所述行进方向的移动重新开始。
同样,在该机械手的使用方法中,即使在由于工件的把持姿势不当, 处理过程中对工件施加了异常的外力的情况下,也能够通过变更工件的把 持姿势,将工件适当地地插入被插入工件的插入孔,从而能够减少无法插 入的情况。
(12)(11)中所述的机械手的使用方法还可以如下:在所述姿势变 更步骤中,使构成所述基端侧接触部的袋部件的至少任一个膨胀,而使所 述工件朝向设置有该基端侧接触部的把持部件的前端侧移动。
该机械手的使用方法中,在姿势变更步骤中,使构成基端侧接触部的 袋状致动器膨胀而使工件向设置有该基端侧接触部的把持部件的前端侧移 动。由此,在一些情况下,能够更容易地改变工件的姿势,使得重新开始 后的异常外力小于停止前的异常外力。通过这种方法,能够在更宽的范围 将工件适当地插入被插入工件的插入孔,从而能够进一步减少无法插入的 情况。
另外,工件朝向把持部件的前端侧的移动除了工件朝向把持部件的前 端侧平移的情况之外,还可以举出工件旋转移动以使得工件中基端侧接触 部所接触的部位朝向把持部件的前端侧移动的情况,以及包括上述的平移 和旋转移动两者的情况。
附图说明
下面将参照附图来描述本发明的示例性实施例的特征、优点以及技术 上和工业上的意义,其中,同样的标号表示同样的要素,其中:
图1涉及实施方式1、2,是示出机械手的说明图,该机械手在前端部 具备使用了袋状致动器系统的卡盘装置的卡盘机构。
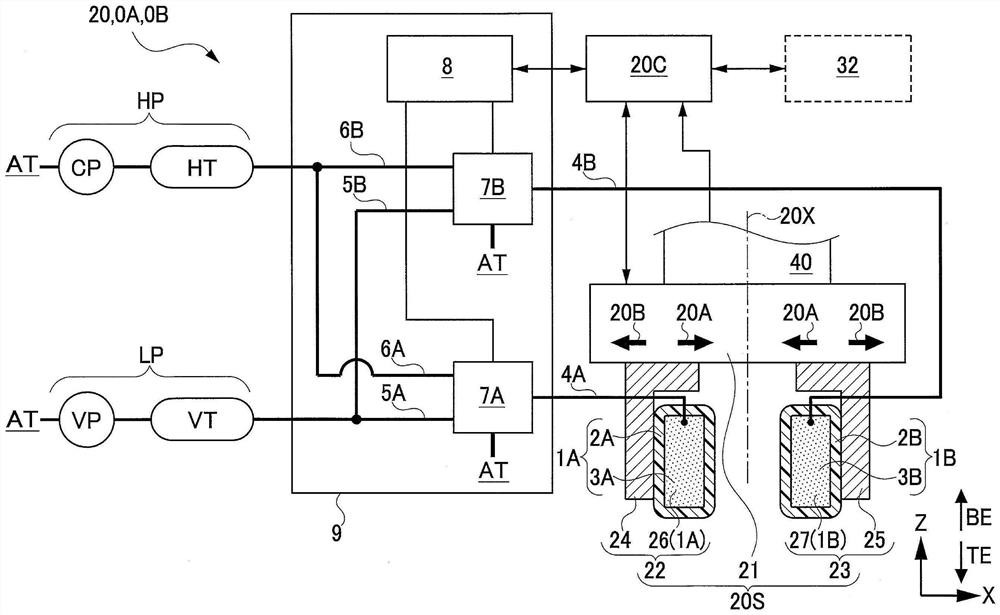
图2涉及实施方式,是使用了袋状致动器系统的卡盘装置的说明图。
图3涉及实施方式1,是示出将由卡盘装置把持住的第一连接器沿着 第二连接器的轴线插入插入孔之前的状态的说明图。
图4涉及实施方式1,是示出将由卡盘装置把持住的第一连接器插入 第二连接器的插入孔之后的状态的说明图。
图5涉及实施方式1,是示出通过机械手,由卡盘装置把持第一连接 器,并插入第二连接器的插入孔的处理流程的流程图。
图6涉及实施方式1,是示出在卡盘机构的轴线和第二连接器的轴线 具有偏移角度的状态下,将由卡盘装置把持住第一连接器插入第二连接器 的插入孔,并通过对异常外力的检测停止第一连接器的移动的状态的说明 图。
图7涉及实施方式1,是示出将由卡盘装置把持住第一连接器通过连 通于高气压的接触把持部挤压而使其移动的状态的说明图。
图8涉及实施方式1,是示出将移动了的第一连接器由卡盘装置重新 把持,并重新开始插入第二连接器的插入孔的状态的说明图。
图9涉及实施方式2,是使用了袋状致动器系统的卡盘装置的说明图。
图10涉及实施方式2,是示出将由卡盘装置把持住的第一连接器沿着 第二连接器的轴线插入插入孔之前的状态的说明图。
图11涉及实施方式2,是示出将由卡盘装置把持住的第一连接器插入 第二连接器的插入孔之后的状态的说明图。
图12是示出通过实施方式2中的机械手,由卡盘装置把持第一连接器, 并插入第二连接器的插入孔的处理流程的流程图。
图13涉及实施方式2,是示出在卡盘机构的轴线和第二连接器的轴线 具有偏移角度的状态下,将由卡盘装置把持住的第一连接器插入第二连接 器的插入孔,并通过对异常外力的检测停止第一连接器的移动的状态的说 明图。
图14涉及实施方式2,是示出将由卡盘装置把持住的第一连接器通过 连通于高气压的接触把持部挤压而使其移动的状态的说明图。
图15涉及实施方式2,是示出将移动了的第一连接器由卡盘装置重新 把持,并重新开始插入第二连接器的插入孔的状态的说明图。
具体实施方式
(实施方式1)
以下将参照图1~图8对本发明的第1实施方式进行说明。图1示出本 实施方式1的机械手30,图2示出使用了袋状致动器系统0A、0B的卡盘 装置20的结构。
本实施方式1的机械手30如图1所示,在机械手主体31的前端部31S (图1中的左侧),经由力传感器40,设置有卡盘装置20的卡盘机构20S。 其中,机械手主体31是所谓的多关节机器人,由机械手控制装置32控制 其各部的位置和移动。另一方面,卡盘装置20的卡盘机构20S如后面所 述,是构成为能够把持工件(例如第一连接器C1)的电动夹爪。
如图2所示,卡盘装置20的卡盘机构20S包括卡盘主体部21、和从 该卡盘主体部21延伸的一对把持部件22、23。该把持部件22、23构成为 能够滑动移动卡盘主体部21,通过卡盘控制部20C控制工件的把持或释放 的动作。另外,如图2中的箭头所示,将把持部件22、23的移动过程中彼 此靠近的方向设为把持侧20A,将彼此分离的方向设为释放侧20B。即, 在卡盘机构20S中,能够通过使把持部件22、23移动到把持侧20A来把 持工件,通过使其移动到释放侧20B来释放所把持的工件。
力传感器40是能够检测作为平移方向的X、Y、Z这三个方向的平移 力以及作为绕各轴旋转的旋转方向的Rx、Ry、Rz这三个方向的力矩的六 轴力传感器。在本实施方式1中,如图2所示,以把持部件22、23的滑动 移动方向成为X方向,沿卡盘机构20S的轴线20X的方向成为Z方向的 方式将卡盘机构20S安装于六轴力传感器40。另外,与X方向及Z方向 正交的方向成为Y方向,绕Z方向(Z轴、卡盘机构20S的轴线20X)旋 转的方向成为Rz方向,绕X方向(X轴)旋转的方向成为Rx方向,绕Y 方向(Y轴)旋转的方向成为Ry方向。力传感器40的传感器输出被输入 到卡盘控制部20C。
因此,当由把持部件22、23把持工件(例如第一连接器C1)进行规 定的动作时,在所把持的工件、把持部件22、23或卡盘主体部21与其他 部件接触从而被施加了异常外力的情况下,可以通过力传感器40来检测该 异常外力。由此,在通过力传感器40检测到异常外力的情况下,能够进行 工件的异常处理,比如停止由机械手主体31进行的工件移动等。而且,由 于力传感器40是六轴力传感器,所以当对工件实施预定的处理时,能够经 由工件等将施加于把持机构的外力分解到各轴,从而更准确地检测外力。
下面根据图2对卡盘装置20进一步进行说明。卡盘机构20S的把持 部件22、23分别包括以由金属构成的、以截面L字状相互对置而配置的 爪部件24、25、和设置于爪部件24、25的接触把持部26、27。其中,爪 部件24、25分别具有一部分支承于卡盘主体部21的基部24A、25A、和 从该基部24A、25A沿着轴线20X延伸的爪部24B、25B。该接触把持部 26、27分别配置于爪部24B、25B的内侧。因此,在通过卡盘机构20S的 把持部件22、23把持工件的情况下,工件与接触把持部26、27接触而被 把持住。
而且,该接触把持部26、27是袋状致动器系统0A、0B中的袋状致动 器1A、1B。该袋状致动器1A、1B(接触把持部26、27)包括柔软易变 形且具有密封性的袋部件2A、2B、和填充在该袋部件2A、2B内的可流 动粒状物3A、3B。在本实施方式1中,袋部件2A、2B由丁腈橡胶(NBR) 构成,粒状物3A、3B由氧化铝粒子构成。袋状致动器1A、1B由连接于 低气压源LP及高气压源HP的致动器控制装置9驱动。
具体而言,袋状致动器1A、1B的袋部件2A、2B内通过袋部件连通 配管4A、4B分别与切换机构7A、7B连接。该切换机构7A、7B分别通 过低气压源连通配管5A、5B与外部空气AT连接,并通过高气压源连通 配管6A、6B与高气压源HP连接。并且,通过切换控制部8的控制,能够通过袋部件连通配管4A、4B将袋部件2A、2B内切换连接到外部空气 AT、低气压源LP或高气压源HP。切换控制部8与卡盘控制部20C连接, 通过机械手控制装置32、卡盘控制部20C及切换控制部8的协作,进行机 械手主体31、卡盘主体部21及袋状致动器1A、1B的驱动控制,能够由 卡盘主体部21适当地把持工件,使其进行预定的动作。
另外,在袋状致动器1A、1B的袋部件2A、2B内通过袋部件连通配 管4A、4B与外部空气AT连通的情况下,袋部件2A、2B内也与外部气 压(大气压)等同,成为所填充的粒状物3A、3B可容易地流动的状态。 因此,当工件与袋状致动器1A、1B(袋部件2A、2B)接触而对其施加力 时,袋部件2A、2B容易发生变形,填充在该袋部件2A、2B内的粒状物 3A、3B会产生流动。即,袋部件2A、2B(袋状致动器1A、1B)成为柔 软且易非弹性变形的状态。
一方面,在袋部件2A、2B内通过袋部件连通配管4A、4B与低气压 源连通配管5A、5B连通的情况下,通过与低气压源连通配管5A、5B连 通的低气压源LP,袋部件2A、2B内被减压,袋部件2A、2B被袋部件 2A、2B外的大气压挤压。由此,填充在袋部件2A、2B内的粒状物3A、 3B被压缩,粒状物3A、3B彼此相互紧贴而变得难以流动,因此袋部件 2A、2B(袋状致动器1A、1B)成为坚硬且难以变形的状态。
另一方面,在袋部件2A、2B内通过袋部件连通配管4A、4B与高气 压源连通配管6A、6B连通的情况下,通过与高气压源连通配管6A、6B 连通的高气压源HP,袋部件2A、2B能够从内侧被加压而像气球一样膨 胀起来,从而成为弹性可变形的状态。因此,例如,能够弹性地挤压与袋 部件2A、2B(袋状致动器1A、1B)相邻的工件等,或者使通过来自袋部 件2A、2B(袋状致动器1A、1B)的挤压力而接触的工件等移动。或者, 能够弹性地把持工件。
如此,在本实施方式1的袋状致动器系统0A、0B中,袋状致动器1A、1B能够分别处于“可弹性变形的状态/柔软且易非弹性变形的状态/坚硬且 难以变形的状态”这三种状态。另外,在本实施方式中,与低气压源连通配 管5A、5B连接的低气压源LP包括真空储存器VT和与其连接的真空泵 VP。另外,与高气压源连通配管6A、6B连接的高气压源HP包括高压储存器HT和与其连接的压缩机CP。但是,也可以将真空泵VP直接与低气 压源连通配管5A、5B连接。另外,也可以将压缩机CP直接与高气压源 连通配管6A、6B连接。但是,通过使用真空储存器VT或高压储存器HT, 具有能够抑制压力变动的优点。或者,也可以使用氮气气瓶等高压气体的 气瓶来代替压缩机CP。
另外,在本实施方式1的卡盘装置20中,卡盘机构20S的各接触把 持部26、27包括袋状致动器系统0A、0B的袋状致动器1A、1B,并能够 实现上述三种状态。因此,在该卡盘装置20中,能够从上述三种状态中选 择而使接触把持部26、27与所把持的第一连接器C1接触,能够提高第一 连接器C1的把持状态的自由度,更适当地把持。而且,在本实施方式1中,无论哪个接触把持部26、27都是袋状致动器1A、1B,并且因为可以 选择上述三种状态,所以能够进一步提高把持部件22、23对第一连接器 C1的把持状态的自由度,实现更适当的把持。
接着,关于使用了具有卡盘装置20的该机械手30的工件的处理,对 以下处理进行说明。即,通过机械手30的卡盘机构20S把持作为工件的 第一连接器C1,并插入到作为被插入工件的物体OJ的第二连接器C2的 插入孔C2H(参照图3、图4、图5)。另外,设定作为被插入工件的物体 OJ及其第二连接器C2配置在预定位置。
首先,在把持步骤S1中,通过卡盘机构20S的把持部件22、23来把 持第一连接器C1中的被把持部C1G。具体而言,使把持部件22、23分别 移动到释放侧20B(外侧)(步骤S11),将接触把持部26、27(袋部件2A、 2B)内与外部空气AT连通(步骤S12)。与此同时,使卡盘机构20S移动 到第一连接器C1的把持位置(步骤S13)。具体而言,通过机械手主体31 使卡盘机构20S移动,并定位卡盘机构20S以使得第一连接器C1的被把 持部C1G位于两个把持部件22、23之间。在该状态下,使两个把持部件 22、23分别移动到把持侧20A(内侧),将第一连接器C1的被把持部C1G 夹持在接触把持部26、27之间直到把持部件22、23不能移动为止(步骤S14)。另外,此时,由于接触把持部26、27内与外部空气AT连通,所以 接触把持部26、27容易变形为模仿所接触的第一连接器C1的被把持部 C1G的形态。这是因为袋部件2A、2B内的粒状物3A、3B容易流动。
接着,将接触把持部26、27内抽真空(步骤S15)。具体而言,通过 切换机构7A、7B切换袋部件连通配管4A、4B的连通目标而与低气压源 连通配管5A、5B连通,通过低气压源LP对袋部件2A、2B内减压。由 此,在大致模仿所接触的第一连接器C1的被把持部C1G的形态的状态下, 接触把持部26、27成为坚硬且难以变形的状态。这样一来,卡盘机构20S 能够适当地把持第一连接器C1中的被把持部C1G。另外,图3和图4示 出了以第一连接器C1的轴线C1X与卡盘机构20S的轴线20X一致的方式 把持住了第一连接器C1的情况。
然后,通过机械手主体31将卡盘机构20S移动到第二连接器C2附近 的预定位置(移动步骤S2)。
在接下来的插入步骤S3中,将第一连接器C1的插入部C1S插入第 二连接器C2的插入孔C2H内。具体而言,驱动机械手主体31,使卡盘机 构20S沿图3中黑箭头所示的轴线20X的方向(行进方向PH)移动。此 时,使卡盘机构20S的轴线20X与第二连接器C2的孔轴线C2X一致,同 时使第一连接器C1的插入部C1S逐渐接近第二连接器C2,并插入第二连 接器C2的插入孔C2H内(参照移动步骤S31和图4)。另外,在本实施 方式1中,图3中黑箭头所示的行进方向PH与上述Z方向一致。另外, 图3、图4示出了卡盘机构20S的轴线20X与第一连接器C1的轴线C1X 一致的情况,因此轴线C1X与孔轴线C2X也是一致的。
在该第一连接器C1的插入过程时,在力传感器40中检测到施加于第 一连接器C1的外力rf。因此,在力传感器40检测到的行进方向PH(Z 方向)的外力(行进方向外力)rfz小于预定的行进方向外力阈值THz的 情况下(rfz<THz,步骤S33中为“是”),返回到移动步骤S31,继续进行 第一连接器C1的插入。
另一方面,在行进方向外力rfz的大小变为行进方向外力阈值THz以 上的情况下(rfz≥THz,步骤S33中为“否”),由于第一连接器C1被插入 到第二连接器C2的插入孔C2H的深处,所以认为行进方向外力rfz变大 了。因此,进入释放步骤S4,停止机械手主体31的移动,同时使卡盘机 构20S的把持部件22、23移动到释放侧20B,从卡盘机构20S释放第一 连接器C1。由此,完成第一连接器C1向第二连接器C2的插入。
在上述第一连接器C1向第二连接器C2的插入过程中,如图3、图4 所示,优选维持通过卡盘机构20S把持住的第一连接器C1的轴线C1X与 卡盘机构20S的轴线20X一致,第一连接器C1的轴线C1X与第二连接器 C2的孔轴线C2X一致的状态,同时使卡盘机构20S向黑箭头所示的行进 方向PH(Z方向)移动而将第一连接器C1插入第二连接器C2。但是, 在通过卡盘机构20S把持住第一连接器C1时,如图3所示,并不仅限于 能够使得第一连接器C1的轴线C1X与卡盘机构20S的轴线20X一致地把 持。即,也可能有第一连接器C1偏离预定的位置而被把持的情况,或者 在轴线C1X倾斜的状态下第一连接器C1被把持的情况。此外,第二连接器C2偏离预定的位置而配置的情况,或者第二连接器C2配置于孔轴线 C2X倾斜的状态下的情况也是有可能的。
这样,在第一连接器C1或第二连接器C2的姿势等不当的情况下,在 插入步骤S3中,即使想通过机械手主体31,以卡盘机构20S作为规定的 轨迹或姿势将第一连接器C1插入第二连接器C2,也会发生不能适当地将 第一连接器C1插入到插入孔C2H的深处的情况。在这种情况下,经常会 成为这样的状态:第一连接器C1的插入部C1S的一部分位于第二连接器 C2的插入孔C2H内,但第一连接器C1的插入部C1S的前端周缘部C1SE 与第二连接器C2的插入孔C2H的内壁面C2HI接触,从而第一连接器 C1卡在第二连接器C2的插入孔C2H内(参照图6)。
而且在这种情况下,通过力传感器40,作为施加于第一连接器C1等 的外力rf,不仅检测行进方向PH(Z方向)的外力(行进方向外力rfz), 还检测与其正交的方向(X方向和Y方向)的异常外力。另外,在本实施 方式中,为了简化,仅考虑X方向(把持部件22、23的滑动移动方向) 的异常外力rfx作为与行进方向PH(Z方向)正交的方向(X方向和Y 方向)的异常外力。
进而,在本实施方式中,在把持部件22、23的接触把持部26、27使 用袋状致动器1A、1B。因此,如上所述,即使在插入步骤S3的中途不能 将第一连接器C1充分插入到第二连接器C2的插入孔C2H的深处的情况 下,也能够变更通过卡盘机构20S暂时把持住的第一连接器C1的姿势, 如果姿势变更之后重新开始插入步骤S3中的插入的话,就能够继续进行第一连接器C1向第二连接器C2的插入,并且如果一次或多次重复进行改 变姿势和重新开始插入的操作,最终能够完成第一连接器C1向第二连接 器C2的插入。
因此,在本实施方式中,在移动步骤S31中,在使第一连接器C1移 动时设置有异常外力监视步骤S32。在该异常外力监视步骤S32中,监视 力传感器40检测到的异常外力rfx的大小(绝对值)|rfx|是否小于异常外 力阈值THx。这里,在异常外力rfx的大小|rfx|小于异常外力阈值THx (|rfx| 下面将对异常外力监视步骤S32、移动停止步骤S34、姿势变更步骤 S35、再把持步骤S36和重新开始步骤S37进行详细描述。在图3和图4 所示的第一连接器C1和第二连接器C2的姿势适当时的插入处理中、即在 以卡盘机构20S的轴线20X和第一连接器C1的轴线C1X一致的方式把持 第一连接器C1,将这些轴线20X、C1X设为与第二连接器C2的孔轴线 C2X一致而使卡盘机构20S在行进方向PH(Z方向)上行进的插入处理 中,难以对上述步骤S32~S37的处理进行说明。 因此,另行模拟卡盘机构20S对第一连接器C1的把持姿势不当的情 况、或者第二连接器C2的配置姿势不当的情况,在插入步骤S3中,必须 设定成为这样的状态的情况:虽然第一连接器C1的插入部C1S的一部分 位于第二连接器C2的插入孔C2H内,但第一连接器C1的插入部C1S的 前端周缘部C1SE与第二连接器C2的插入孔C2H的内壁面C2HI接触, 从而第一连接器C1卡在第二连接器C2的插入孔C2H内。即,在以卡盘 机构20S的轴线20X与第一连接器C1的轴线C1X一致的方式把持住第一 连接器C1的基础上,有意地相对于第二连接器C2的插入孔C2H倾斜地 插入。即,以卡盘机构20S的轴线20X相对于第二连接器C2的孔轴线C2X 形成偏移角度θ1而斜交的方式使卡盘机构20S向行进方向PH(Z方向) 移动(参照图6)。在这样的情况下,以下对这样的处理进行说明:在插入 步骤S3中变更卡盘机构20S对第一连接器C1的把持姿势而将第一连接器 C1插入第二连接器C2。另外,在这种情况下,把持步骤S1、移动步骤 S2以及释放步骤S4也是同样的,因此以下将省略对这些步骤的说明。 如上所述,在把持步骤S1中,在以卡盘机构20S的轴线20X与第一 连接器C1的轴线C1X一致的方式把持住第一连接器C1的基础上,使其 移动到第二连接器C2附近(参照移动步骤S2、图5)。接着,在插入步骤 S3中的移动步骤S31中,使卡盘机构20S向黑色箭头所示的行进方向PH 行进。于是,第一连接器C1的前端周缘部C1SE的一部分(图6中的左 下角部)与第二连接器C2的插入孔C2H的内壁面C2HI接触。于是,如 图6所示,第一连接器C1受到作为来自插入孔C2H的内壁面C2HI的反 作用力的外力rf。另外,该外力rf还传递到卡盘机构20S、力传感器40 以及机械手主体31。 如图6所示,该外力rf分为行进方向PH(Z方向)的行进方向外力 rfz和与其正交的把持部件22、23的滑动移动方向(X方向)的异常外力 rfx(停止前的异常外力rfxb)。然后,在异常外力监视步骤S32中,判断 异常外力rfx的大小(绝对值)|rfx|是否小于异常外力阈值THx (|rfx| 接着,在姿势变更步骤S35中,将接触把持部26、27(袋状致动器 1A、1B)之中施加了异常外力rfx的一侧的接触把持部(图7中的下侧的 接触把持部27)内释放到外部空气AT。即,通过切换控制部8切换切换 机构7B而将袋状致动器1B内与外部空气AT连通(步骤S351)。由此, 使接触把持部27(袋状致动器1B)成为柔软且易非弹性变形的状态。 另一方面,将与施加了异常外力rfx的一侧相反侧的接触把持部(图 7中的上侧的接触把持部26)内与高气压源HP连通。即,通过切换控制 部8切换切换机构7A而将袋状致动器1A内与高气压源连通配管6A连通, 从而与高压储存器HT连通(步骤S352)。由此,使接触把持部26(袋状 致动器1A)如气球那样膨胀而成为可弹性变形的状态,如图7所示,以黑 箭头所示的挤压力F挤压第一连接器C1。于是,第一连接器C1从点划线 所示的姿势移动到实线所示的姿势,并且接触把持部27(袋状致动器1B) 发生变形。另外,通过第一连接器C1的移动,成为第一连接器C1的轴线 C1X与卡盘机构20S的轴线20X不一致的状态。 接着,进入再把持步骤S36,使两个把持部件22、23再次分别移动到 把持侧20A(内侧),将第一连接器C1的被把持部C1G夹持在接触把持 部26、27之间直到把持部件22、23不能移动为止(步骤S361)。进而, 通过切换控制部8切换切换机构7A、7B而再次将接触把持部26、27(袋 状致动器1A、1B)分别与低气压源连通配管5A、5B连通,从而与低压 储存器LT连通(低气压源LP)(步骤S362)。这样,通过把持部件22、 23再次把持住姿势变更后的第一连接器C1。 进而在重新开始步骤S37中,使暂时停止了的移动步骤S31重新开始, 继续进行第一连接器C1的插入(参照图8)。如上所述,由于改变了第一 连接器C1的姿势,因此能够消除重新开始后的外力rfa、行进方向外力rfza 以及异常外力rfxa(rfa=rfza=rfxa=0),或者使异常外力rfxa比停止前 的异常外力rfxb减少(rfxa 另外,在步骤S31~S33的重复过程中再次在步骤S32中判断为“否” (|rfx|≥THx)的情况下,再次进行步骤S34~S37,重新开始插入。 一般来说,在偏移角度θ1足够小的情况下(例如θ1=0~7.5deg时), 第一连接器C1的前端周缘部C1SE不与第二连接器C2的内壁面C2 HI 接触,从而重新开始后的异常外力rfxa的大小|rfxa|小于异常外力阈值 THx(|rfxa| 另一方面,在偏移角度θ1大到一定程度的情况下(例如θ1=7.5~18deg 时),通过将第一连接器C1的姿势变更1~3次(将步骤S34~S37进行1~3 次),可以根据步骤S31继续进行第一连接器C1的插入,能够完成第一连 接器C1向第二连接器C2的插入。 但是,在偏移角度θ1过大的情况下(例如θ1≥18deg时),即使通过 步骤S34~S37反复变更第一连接器C1的姿势,也可能会发生难以完成第 一连接器C1向第二连接器C2的插入的情况。 通过几次姿势变更(步骤S34~S37),可导致能完成第一连接器C1向 第二连接器C2的插入的偏移角度θ1的范围(例如θ1=7.5~18deg)根据 第一连接器C1及第二连接器C2的插入孔C2H的形态、两者之间的间隙 的大小、各连接器的材质等而不同。 另外,如图3、图4所示,在将第二连接器C2的孔轴线C2X与卡盘 机构20S的轴线20X所形成的偏移角度θ1设为θ1=0的情况下,通过几 次姿势变更(步骤S34~S37),可导致能完成第一连接器C1向第二连接器 C2的插入的、卡盘机构20S对第一连接器C1的把持姿势的容许范围或者 第二连接器C2的配置姿势的容许范围也会根据第一连接器C1及第二连接器C2的插入孔C2H的形态、两者之间的间隙的大小、各连接器的材质等 而不同。 但是,在任何情况下,根据上述机械手30的使用方法,即使在由于第 一连接器C1(工件)的把持姿势不当等而在处理途中对工件施加了异常外 力的情况下,也能够通过变更上述第一连接器C1的把持姿势(姿势变更 步骤S35A),将第一连接器C1适当地插入第二连接器C2(被插入工件) 的插入孔C2H中,从而减少不能插入的情况。 (实施方式2) 接下来将参照图1和图9~图15对第2实施方式进行说明。但是,将 会以与实施例1不同的部分为中心进行说明,相同的部分省略或简化记载。 另外,对相同的部分以相同的符号标记。在实施方式2的机械手130中, 机械手主体31、机械手控制装置32以及力传感器40与实施方式1的机械 手30(参照图1、图2)具有相同的结构。另外,在实施方式2的卡盘装置120中,卡盘机构120S的卡盘主体部21以及把持部件122、123的爪 部件24、25也与实施方式1中的卡盘装置20的卡盘机构20S的卡盘主体 部21以及把持部件22、23的爪部件24、25相同。另外,与实施方式1 一样,如图9中的箭头所示,将把持部件122、123相互靠近的方向设为把 持工件的把持侧120A,将相互远离的方向设为释放所把持的工件的释放侧 120B。 但是,在实施方式1中,把持部件22、23分别具有作为袋状致动器 1A、1B的接触把持部26、27各一个。 对此,如图9所示,本实施方式2的机械手130中,卡盘主体部121 的把持部件122、123分别具有接触把持部126、127和基端侧接触部128、 129各一个。即,把持部件122、123在爪部件24、25的爪部24B、25B 的内侧分别具有在把持状态下与工件(例如第一连接器C1)接触而把持工 件的接触把持部126、127,除此之外,在基部24A、25A的前端侧TE还 分别具有比接触把持部126、127更靠近基端侧BE且从把持部件122、123 的基端侧BE与工件接触的基端侧接触部128、129。 该接触把持部126、127以及基端侧接触部128、129是袋状致动器系 统10A~10D中的袋状致动器11A~11D。该袋状致动器11A~11D与实施方 式1的袋状致动器1A、1B相同,包括柔软易变形且具有密封性的袋部件 12A~12D、和填充于其中的可流动粒状物13A~13D。在本实施方式2中, 袋部件12A~12D也由腈橡胶构成,粒状物13A~13D也由氧化铝粒子构成。 另外,袋状致动器11A~11D由与低气压源LP和高气压源HP连接的致动 器控制装置19驱动。 具体而言,袋状致动器11A~11D的袋部件12A~12D内通过袋部件连 通配管14A~14D分别与切换机构17A~17D连接。该切换机构17A~17D分 别通过低气压源连通配管15A~15D与外部空气AT连接,并通过高气压源 连通配管16A~16D与高气压源HP连接。并且,通过切换控制部18的控 制,能够通过袋部件连通配管14A~14D将袋部件12A~12D内切换连接到 外部空气AT、低气压源LP或高气压源HP。切换控制部18与卡盘控制 部20C连接,通过机械手控制装置32、卡盘控制部20C及切换控制部18 的协作,进行机械手主体131、卡盘主体部121及袋状致动器11A~11D的 驱动控制,能够在卡盘主体部121适当地把持住工件,使其进行预定的动 作。 另外,袋状致动器11A~11D通过切换袋部件12A~12D内的气压,能 够成为“可弹性变形的状态/柔软且易非弹性变形的状态/坚硬且难以变形 的状态”这三种状态,这一点与实施方式1的袋状致动器1A、1B相同,所 以省略说明。 在本实施方式2的袋状致动器系统10A~10D中,袋状致动器11A~11D 也能够分别成为“可弹性变形的状态/柔软且易非弹性变形的状态/坚硬且 难以变形的状态”这三种状态。 另外,在本实施方式2的卡盘装置120中,卡盘机构120S的各接触 把持部126、127以及基端侧接触部128、129也由袋状致动系统10A~10D 的袋状致动器11A~11D构成,能够实现上述三种状态。因此,在该卡盘装 置120中,也可以从上述三种状态中选择而使接触把持部126、127与所把 持的第一连接器C1接触,能够提高第一连接器C1的把持状态的自由度, 更适当地把持。此外,使基端侧接触部128、129成为上述三种状态中的任 一种,能够进一步提高第一连接器C1的把持状态的自由度,实现更适当 的把持。 而且,无论哪个接触把持部126、127以及基端侧接触部128、129都 由袋状致动器11A~11D构成,能够选择上述三种状态,因此,能够进一步 提高把持部件122、123对第一连接器C1的把持状态的自由度,实现更适 当的把持。 因此,在通过把持部件122、123把持住工件(例如第一连接器C1) 而使其进行预定的动作时,所把持的工件、把持部件122、123或卡盘主体 部121与其他部件接触而受到异常外力的情况下,可以通过力传感器40 来检测该异常外力。因此,在通过力传感器40检测到异常外力的情况下, 能够进行工件的异常处理,比如停止由机械手主体131进行的工件移动等。 而且,由于力传感器40是六轴力传感器,所以当对工件实施预定的处理时, 能够经由工件等将施加于把持机构的外力分解到各轴,从而更准确地检测 外力。 接着,关于使用了该机械手130的工件的处理,与实施方式1一样, 将通过以下处理进行说明:通过机械手130的卡盘机构120S来把持作为 工件的第一连接器C1,将其插入作为被插入工件的物体OJ的第二连接器C2的插入孔C2H(参照图10~图12)。另外,设定作为被插入工件的物 体OJ及其第二连接器C2配置在预定位置。 首先,在把持步骤S1A中,通过卡盘机构120S的把持部件122、123 把持第一连接器C1中的被把持部C1G。该把持步骤S1A与实施方式1的 把持步骤S1(参照步骤S11~S15以及图5)大致相同。但是,将接触把持 部126、127以及基端侧接触部128、129(袋部件12A~12D)内与外部空 气AT连通(步骤S12A)来取代步骤S12这一点,以及将接触把持部126、 127以及基端侧接触部128、129(袋部件12A~12D)内抽真空(步骤S15A) 来取代步骤S15这一点不同。由此,卡盘机构120S能够适当地把持第一 连接器C1中的被把持部C1G。另外,图10、图11与实施方式1中的图3、 图4相同,示出了以第一连接器C1的轴线C1X与卡盘机构120S的轴线120X一致的方式把持住第一连接器C1的情况。 之后,与实施方式1一样,通过机械手主体131将卡盘机构120S移 动到第二连接器C2附近的预定位置(移动步骤S2)。 在后续的插入步骤S3A中,以与实施方式1相同的处理顺序,将第一 连接器C1的插入部C1S插入第二连接器C2的插入孔C2H内。具体而言, 驱动机械手主体131,使卡盘机构120S向沿图10中黑箭头所示的轴线 120X的行进方向PH移动。此时,在使卡盘机构120S的轴线120X与第 二连接器C2的孔轴线C2X一致的同时,使第一连接器C1的插入部C1S 逐渐接近第二连接器C2,并插入第二连接器C2的插入孔C2H内(移动 步骤S31、参照图11)。在本实施方式2中,行进方向PH也与Z方向一 致。另外,图10和图11示出了卡盘机构120S的轴线120X与第一连接器 C1的轴线C1X一致的情况,因此轴线C1X和孔轴线C2X也是一致的。 在第一连接器C1的插入部C1S插入了第二连接器C2的插入孔C2H 内的情况下(步骤S33中为“否”),与实施方式1一样,进入释放步骤S4, 停止机械手主体31的移动,并且将第一连接器C1从卡盘机构20S中释放 出来。由此,完成将第一连接器C1向第二连接器C2的插入。 另外,本实施方式2的插入步骤S3A与实施方式1的插入步骤S3、 姿势变更步骤S35A以及再把持步骤S36A不同,其他则相同。在图10和 图11所示的方案中难以对这些步骤进行说明。因此,与在实施方式1中用 图6~图8进行说明一样,在本实施方式2中,也同样模拟卡盘机构20S对 第一连接器C1的把持姿势不当的情况或者第二连接器C2的配置姿势不当 的情况,利用图13~图15,以卡盘机构120S的轴线120X相对于第二连接 器C2的孔轴线C2X形成偏移角度θ2而斜交的方式使卡盘机构120S向行 进方向PH(Z方向)移动(参照图6)。在这样的情况下,以下对下述处 理进行说明:在插入步骤S3A中变更卡盘机构20S对第一连接器C1的把 持姿势而将第一连接器C1插入第二连接器C2。另外,在这种情况下,把 持步骤S1A、移动步骤S2以及释放步骤S4也是相同的,因此以下将省略 对这些步骤的说明。 如上所述,在把持步骤S1A中,在以卡盘机构20S的轴线20X与第 一连接器C1的轴线C1X一致的方式把持住第一连接器C1的基础上,使 其移动到第二连接器C2附近(参照移动步骤S2、图12)。接着,在插入 步骤S3A中的移动步骤S31中,使卡盘机构20S向行进方向PH行进。于 是,第一连接器C1的前端周缘部C1SE的一部分(图13中的左下角部) 与第二连接器C2的插入孔C2H的内壁面C2HI接触。于是,如图13所 示,第一连接器C1受到作为来自插入孔C2H的内壁面C2HI的反作用力 的外力rf。另外,该外力rf还传递到卡盘机构20S、力传感器40以及机 械手主体31。 在后续的异常外力监视步骤S32中,与实施方式1相同,判断异常外 力rfx(停止前的异常外力rfxb)的大小|rfx|是否小于异常外力阈值THx (|rfx| 在接下来的姿势变更步骤S35A中,不同于实施方式1,根据异常外 力rfx的方向及大小等,计算各接触把持部126、127及基端侧接触部128、 129(袋状致动器11A~11D)内与真空、外部空气、高气压中的哪一个连 接(步骤S353A)。 接着,将在步骤S353A中指定的接触把持部或基端侧接触部(图14 中的下侧的接触把持部127)内释放到外部空气AT。即,通过切换控制部 18切换切换机构17B而将袋状致动器11B内与外部空气AT连通(步骤 S351A)。由此,使接触把持部127(袋状致动器11B)成为柔软且易非弹 性变形的状态。 另外,将在步骤S353A中指定的接触把持部或基端侧接触部(图14 中的上侧的接触把持部126和下侧的基端侧接触部129)内与高气压源HP 连接。即,通过切换控制部18切换切换机构17A、17D而将袋状致动器 11A、11D内与高气压源连通配管16A、16D连通,从而与高压储存器HT 连通(步骤S352A)。剩余的接触把持部或基端侧接触部(图14中的上 侧的基端侧接触部128)内保持与低气压源LP连接而不切换切换机构17C, 即保持真空的连接,维持坚硬且难以变形的状态。由此,使接触把持部126 和基端侧接触部129(袋状致动器11A、11D)如气球一样膨胀而成为可弹 性变形的状态,如图14所示,以挤压力F1、F2进行挤压以使得第一连接 器C1顺时针旋转。由此,第一连接器C1从点划线所示的姿势移动到实线 所示的姿势,并且接触把持部127(袋状致动器11B)发生变形。另外, 即使在第一连接器C1的移动过程中,也会成为第一连接器C1的轴线C1X 与卡盘机构120S的轴线120X不一致的状态。 接着,进入再把持步骤S36A,与实施方式1一样,使两个把持部件 122、123再次分别移动到再次把持侧120A(内侧),将第一连接器C1的 被把持部C1G夹持在接触把持部26、27之间直到把持部件22、23不能移 动(步骤S361)。进而,通过切换控制部18切换切换机构17A、17B、17D 而再次将各接触把持部126、127及基端侧接触部128、129(袋状致动器 11A~11D)分别与低气压源连通配管15A~15D连通,从而与低压储存器LT(低气压源LP)连通(步骤S362A)。这样,通过把持部件22、23再 次把持住姿势变更后的第一连接器C1。 之后,与实施方式1相同,在重新开始步骤S37中,使暂时停止了的 移动步骤S31重新开始,继续进行第一连接器C1的插入(参照图15)。 在本实施方式2中,如上所述,由于改变了第一连接器C1的姿势,因此 也能够消除重新开始后的外力rfa、行进方向外力rfza以及异常外力rfxa (rfa=rfza=rfxa=0),或者使异常外力rfxa比停止前的异常外力rfxb减 少(rfxa<rfxb)(图15中示出了rfxa=0的情况)。之后,重复进行步骤 S31~S33,在步骤S33中判断为“否”(rfz≥THz)之后,停止机械手主体 131的移动,并且使把持部件122、123移动到释放侧120B,将第一连接 器C1从卡盘机构120S释放出来(释放步骤S4),完成第一连接器C1向 第二连接器C2的插入。 另外,在步骤S31~S33的重复过程中再次在步骤S32中判断为“否” (|rfx|≥THx)的情况下,再次进行步骤S34~S37,重新开始插入。 与如实施方式1的机械手30那样在把持部件22、23分别仅配置了接 触把持部26、27的情况相比,如本实施方式2的机械手130那样,在把持 部件122、123分别配置了接触把持部126、127和基端侧接触部128、129 时,能够使第一连接器C1(工件)改变为更适当的姿势。因此,通过几次 姿势变更(步骤S34~S37、参照图12),能够使能完成第一连接器C1向第二连接器C2的插入的偏移角度θ2的范围比实施方式1的偏移角度θ1 的范围更宽(例如θ2=7.5~28deg)。 但是,该范围也与实施方式1一样,根据第一连接器C1及第二连接 器C2的插入孔C2H的形态、两者之间的间隙的大小、各连接器的材质等 而不同。 另外,如图10、图11所示,在将第二连接器C2的孔轴线C2X与卡 盘机构120S的轴线120X所形成的偏移角度θ2设为θ2=0的情况下,通 过几次姿势变更(步骤S34~S37,参照图12),可导致能完成第一连接器 C1向第二连接器C2的插入的、卡盘机构120S对第一连接器C1的把持姿 势的容许范围或者第二连接器C2的配置姿势的容许范围也会根据第一连 接器C1及第二连接器C2的插入孔C2H的形态、两者之间的间隙的大小、 各连接器的材质等而不同。 但是,在任何情况下,根据上述机械手130的使用方法,即使在由于 第一连接器C1(工件)的把持姿势不当等而在处理途中对工件施加了异常 外力的情况下,也能够通过变更上述第一连接器C1的把持姿势(姿势变 更步骤S35A),将第一连接器C1适当地插入第二连接器C2(被插入工件) 的插入孔C2H中,从而减少不能插入的情况。 而且,在本实施方式2的机械手130的使用方法中,在姿势变更步骤 S35A中,可以使构成基端侧接触部128的袋状致动器11C或构成基端侧 接触部129的袋状致动器11D膨胀,从而使第一连接器C1(工件)移动 到设置有该袋状致动器11C或袋状致动器11D的把持部件122、123的前 端侧TE,由此,能够改变第一连接器C1的姿势,以使得重新开始后的异常外力的大小|rfx|小于停止前的异常外力的大小。这样,能够在更宽的范 围内将第一连接器C1适当地插入第二连接器C2(被插入工件)的插入孔 C2H,从而能够进一步减少无法插入的情况。 以上,基于实施方式1、2对本发明进行了说明,但本发明并不仅限于 实施方式1、2,当然可以在不脱离其主旨的范围内适当变更而应用。 例如,在实施方式1、2中,示出了在卡盘机构(把持装置)20S、120S 中设置爪状的两个把持部件22、23、122、123来把持工件(例如第一连接 器C1)的例子。但也可以在把持装置设置3个以上把持部件来把持工件。 另外,在实施方式中,示出了把持装置所具备的多个(实施方式1、2 中为两个)把持部件的任一个接触把持部都由袋状致动器构成的例子。但 是,也可以使用把持部件的任一个接触把持部都是不由袋状致动器构成的 形态的把持装置。
- 袋状致动器系统、使用该系统的把持装置以及机械手及其使用方法
- 机械手机构、把持系统、及把持程序