一种矿山配电房停送电操作机器人
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及电网管理技术领域,特别涉及一种矿山配电房停送电操作机器人。
背景技术
矿山配电房管理着整个矿山设备的运行,常年需要对设备进行停送电,人工操作的效率低、耗时长、成本大。市面也有一种使用PLC配电柜,但是需要对配电柜进行改造,而一般矿山配电房不允许改造,并且不符合安全操作规程,还有一种操作机器人,但是该操作机器人只能走直线,所以一台操作机器人只能对一排配电柜进行操作,一般一间配电室需要配置3到4台操作机器人,消耗成本大,并且操作起来需要控制不同机器人,也比较麻烦。
发明内容
本发明的目的就在于为了解决上述配电房的配电柜在停送电时需要较多机器人配合使用,成本过大,且不能准确的移动到指定的配电柜位置进行停送电操作的问题而提供一种矿山配电房停送电操作机器人,具有停送电机器人移动精确,方便执行停送电操作,节约成本的优点。
本发明通过以下技术方案来实现上述目的,一种矿山配电房停送电操作机器人,包括机器人本体、定位模块和检测模块,其中所述定位模块安装在配电柜上,所述检测模块安装在所述机器人本体上,用于通过采集所述定位模块的信息确定所述机器人本体的位置;
所述机器人本体包括可移动的机箱、安装在所述机箱上的支撑架和安装在所述支撑架上的摄像头和操作机构,所述操作机构用于执行停送电操作;
所述机箱的下方安装X轴滚轮和Y轴滚轮,通过升降机构驱动所述X轴滚轮和所述Y轴滚轮中的任意一个,使所述机器人本体沿直线运动。
优选的,所述定位模块包括红外激光对射器、定位标签和接近传感器反射端,检测模块包括红外激光对射器、标签识别模块和接近传感器发射端。
优选的,所述机箱的顶部安装由转向电机驱动的转盘,转盘的表面设置滑轨,支撑架滑动安装在滑轨上,并由推进机构驱动。
优选的,所述X轴滚轮安装在第一升降架上,第一升降架由第一气缸驱动。
优选的,所述Y轴滚轮安装在第二升降架上,第二升降架由第二气缸驱动。
优选的,所述机箱的侧壁上还安装有充电模块,充电模块与设置在配电柜一侧的充电桩适配。
与现有技术相比,本发明的有益效果是:
1、通过定位模块设置在配电柜上,使得机器人本体在移动过程中可以准确的到达开关操作区域,而且机器人本体的移动机构设置呈由X轴滚轮和Y轴滚轮,通过切换两个滚轮的工作模式,实现转向,在配电柜较多的情况下,适合复杂的场景的停送电,且配合定位模块的定位,保证在移动的过程中不会偏离轨道,并且多组配电柜的情况下只需要一个机器人本体即可完成所有配电柜的停送电操作,减少了使用成本。
2、通过检测模块采集定位模块信息的方式对机器人本体的移动进行定位,可以无需铺设轨道节约使用成本。
附图说明
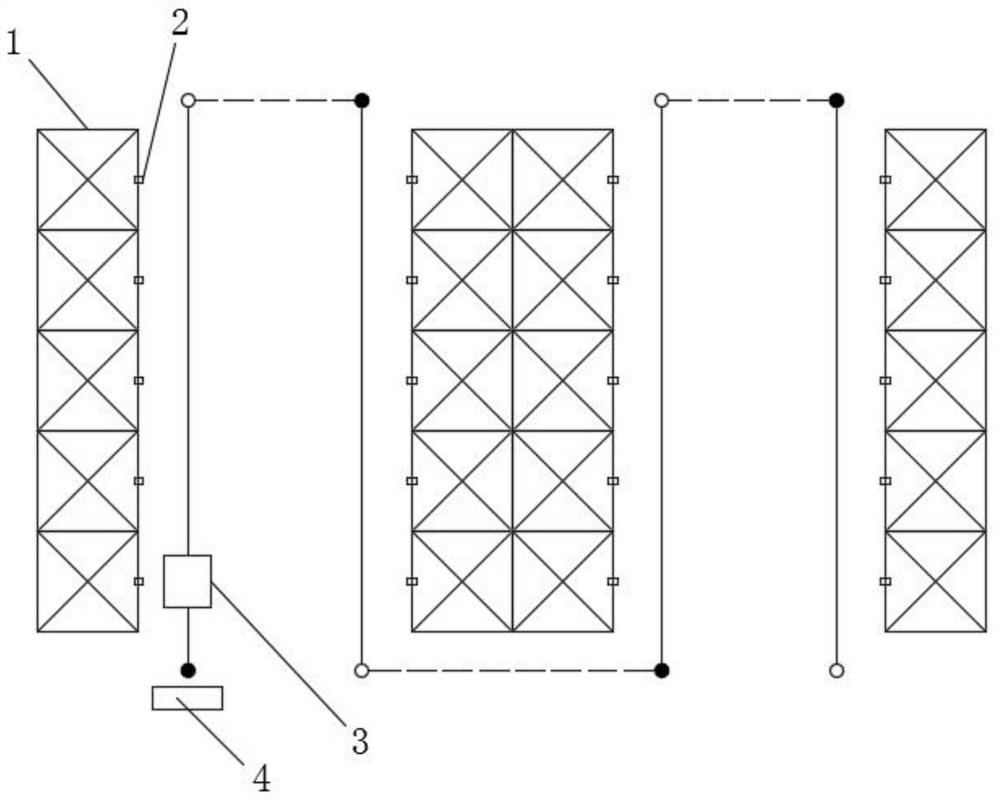
图1为本发明的机器人本体停送电移动轨迹示意图。
图2为本发明的机器人本体结构示意图。
图中:1、配电柜,2、定位模块,3、机器人本体,4、充电桩,5、机箱,6、支撑架,7、转盘,8、滑轨,9、推进机构,10、转向电机,11、摄像头,12、操作机构,13、检测模块,14、第一气缸,15、第一升降架,16、X轴滚轮,17、第二气缸,18、第二升降架,19、Y轴滚轮。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图2所示,一种矿山配电房停送电操作机器人,包括机器人本体3、定位模块2和检测模块13,其中定位模块2安装在配电柜1上,检测模块13安装在机器人本体3上,用于通过采集定位模块2的信息确定机器人本体3的位置,定位模块2作为移动信标,在机器人本体3移动的过程中,检测模块13采集到定位模块2信息后,则证明到达指定的位置,从而精确地对配电柜1执行停送电操作。机器人本体3包括可移动的机箱5、安装在机箱5上的支撑架6和安装在支撑架6上的摄像头11和操作机构12,操作机构12用于执行停送电操作,机器人本体3到达配电柜位置后,操作机构12执行开关转换或开关柜手车的摇动等操作,从而实现配电柜1的停送电,摄像头11用来抓拍操作后的开关图像画面,进行保存备份。
机箱5的下方安装X轴滚轮16和Y轴滚轮19,通过升降机构驱动X轴滚轮16和Y轴滚轮19中的任意一个,使机器人本体3沿直线运动,机箱5通过滚轮实现移动,滚轮有两组,一种是X轴滚轮16,可以使机箱5沿着X轴运动,另一组是Y轴滚轮19,可以使机箱5沿着Y轴运动,X轴滚轮16和Y轴滚轮19不同时投入工作,通过升降机构选择收回其中一组滚轮,从而实现机箱5正常的移动,在配电柜1较多的情况下,可以通过不停的切换X轴滚轮16或Y轴滚轮19,实现机器人本体3经过每个配电柜1。
定位模块2包括红外激光对射器、定位标签和接近传感器反射端,检测模块13包括红外激光对射器、标签识别模块和接近传感器发射端,当机器人本体3上检测模块13的标签识别模块识别到定位标签的信号,表面机器人本体3到达配电柜1位置,检测模块13的激光对射器检测到位于配电柜1上的激光对射器信号后,用来精准的确定操作开关的位置,接近传感器发射端接收到接近传感器反射端的信号时,可以确定机器人本体3与配电柜1之间的间距。
机箱5的顶部安装由转向电机10驱动的转盘7,转盘7的表面设置滑轨8,支撑架6滑动安装在滑轨8上,并由推进机构9驱动,转盘7可以移动操作机构12的指向方向,当机箱5通过X轴滚轮16和Y轴滚轮19实现转向之后,转盘7配合转动,保证操作机构12始终可以对着配电柜1的操作开关,推进机构9驱动操作机构12前进执行停送电操作。
X轴滚轮16安装在第一升降架15上,第一升降架15由第一气缸14驱动,Y轴滚轮19安装在第二升降架18上,第二升降架18由第二气缸17驱动,第一气缸14驱动第一升降架15升起时,X轴滚轮16离开地面,此时Y轴滚轮19接触地面移动工作,第二气缸17驱动第二升降架18升起,第一气缸14驱动第一升降架15下降时,Y轴滚轮19离开地面,X轴滚轮16接触地面进行移动工作,从而方便机器人本体3每次转向90°。
机箱5的侧壁上还安装有充电模块,充电模块与设置在配电柜1一侧的充电桩4适配,充电桩4方便机器人本体3自动充电。
如图1所示,配电柜1设置呈四组,每组配电柜1前均有一条机器人本体3的移动路线,实心黑点为机器人本体3的初始点位置,空心黑点为机器人本体3的终点位置,当机器人本体3走过初始点位置到终点位置这一条线时,可对沿着这条线的配电柜1进行停送电操作(此时为Y轴滚轮19)进行工作,定位模块2不仅安装在配电柜1的每个柜子位置,而且还安装在出初始点和终点处,当机器人本体3到达第一条线路的终点后,通过气缸切换X轴滚轮16工作,到达第二条线路的初始点位置,再切换至Y轴滚轮19进行移动,知道走完第二条线路,到达第二条线路的终点位置,这样依次重复,可以走完整个四组配电柜1组成的四条线路,最后原路返回,机器人本体3退回到充电桩4位置,进行充电。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种矿山配电房停送电操作机器人
- 一种高压开关柜接地刀操作工具及停送电机器人